基于PVDF压电薄膜的仿生触觉检测系统研究
2019-06-25 09:18朱剑锋李永超刘丽双
压电与声光 2019年3期
辛 毅,徐 洋,朱剑锋,刘 涛,李永超,刘丽双
(吉林大学 仪器科学与电气工程学院,吉林 长春 130061)
0 引言
触觉是人类感知外界环境的一种重要知觉。目前将以人类触觉为机理的触觉传感器应用在仿生皮肤领域,使智能机械具备人的感知能力,可对机械、温度、光学及生物刺激做出快速判断反应[1]。灵敏度是检验触觉传感器性能的主要指标[2],当前压电式传感器灵敏度高,固有频率高,信噪比强,动态响应宽,国内外应用广泛。聚偏氟乙烯(PVDF)是一种高分子压电聚合物,PVDF压电薄膜相比压电晶体、压电陶瓷等压电材料具有柔韧性好,介电强度高,声阻抗低,质量小,动态响应宽等优点,同时具备热点性[3],其被广泛应用在新型压电触觉传感器领域。
本文依据PVDF压电薄膜压电效应基本原理,仿生人体生理皮肤结构层,设计了双凸点拱形触觉传感器。通过传感器对比测试实验,验证了双凸点拱形触觉传感器滑觉信号灵敏系数最佳,传感器上凸点层仿生人类皮肤乳突线层,下凸点层仿生人类皮肤中脊线层,单敏感元仿生迈斯纳小体结构,系统对传感器的采集信号进行放大、滤波、傅里叶变换等处理分析,通过信号幅值的均值大小判定检测触觉信号,信号幅值方差判定检测滑觉信号,并由信号的幅频值来设定频率阈值、幅度阈值,判断热觉信号,实现触觉传感器的仿生皮肤功能。
1 总体设计
1.1 系统设计框图
图1为仿生触觉检测系统设计框图。PVDF压电薄膜双凸点拱形传感器采集到触觉信号,经信号调理电路进行电荷、电压放大,滤波去除干扰噪声,信号正向抬升及电压反馈跟随。通过MSP430F149单片机数据采样转换,经虚拟串口传送到上位机LabVIEW软件中分析处理,软件前面板窗口可读取信号及幅频特性曲线、触滑热信号。
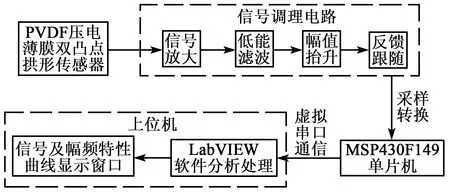
图1 仿生触觉检测系统设计框图
1.2 PVDF压电薄膜基本原理
图2为PVDF压电薄膜正压电效应图。由图可见,PVDF压电薄膜受到外力F作用产生机械形变时,其内部产生极化现象,上、下相对表面产生个数相等、极性相反电荷,形成电位差,称为正压电效应[5]。
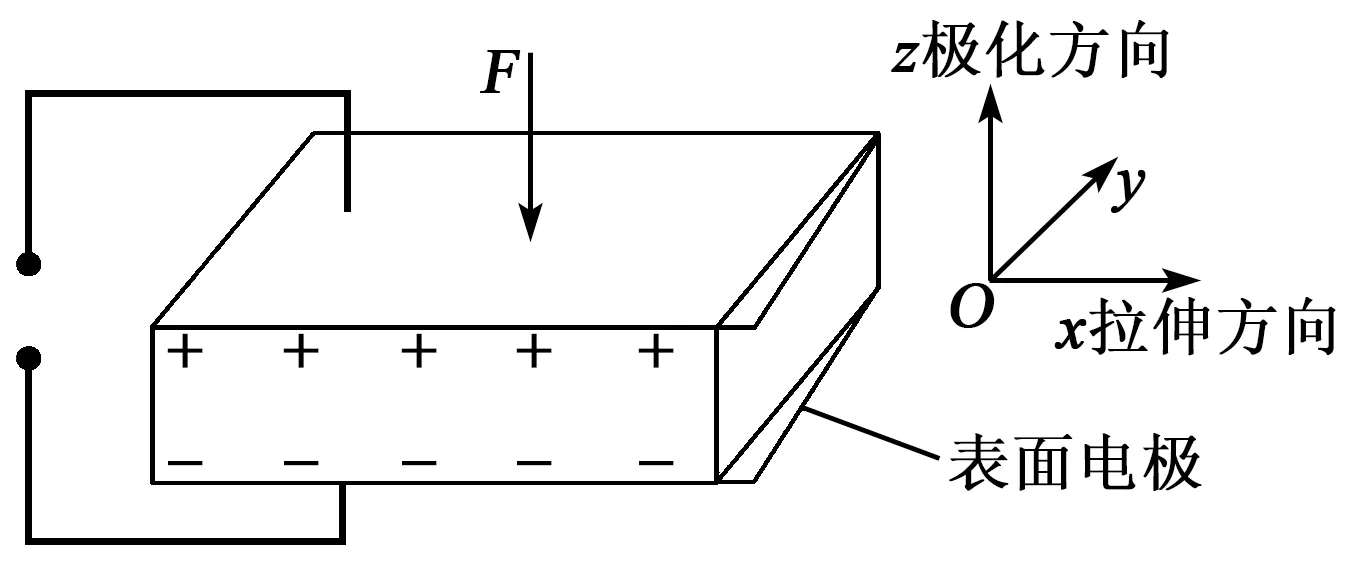
图2 PVDF压电薄膜正压电效应
研究表明,压电薄膜作用模式主要有d31模式和d33模式。d31模式中,压电薄膜受力产生的应变与电荷极化方向垂直;d33模式中,压电薄膜受力产生的应变与电荷极化方向相同。同作用力下,d31模式比d33模式更易产生较大应变,能产生更多电荷[6]。如图3所示,当力F作用在上、下拱形基底上的压电薄膜,使薄膜产生垂直力F方向的拉伸形变,增大薄膜d31工作模式,较平面形基底可生成更多极化电荷,增大输出信号。

图3 拱形基底受力产生的应变示意图
1.3 双凸点拱形结构设计
人类通过分布在皮肤不同深度的多种机械刺激感受器感知外界环境物质。基于仿生学,触觉传感器近似人手指头大小,其尺寸为1.8 cm×1.7 cm,内径0.8 cm,近似手指肚厚度,整体为正弦拱形结构,如图4所示。增大PVDF压电薄膜受力拉伸形变,增强d31工作模式,提高传感器灵敏度[7]。铜箔具有良好的回弹性和导电性能,选取厚为2 mm的铜箔作为凸点层,上、下凸点材质为铜箔,上凸点的点间距为400 μm,仿生手指皮肤表层乳突纹线,增大传感器与接触物质表面最大静摩擦力,其方向垂直压电薄膜极化方向,提高传感器灵敏度[8];下凸点仿生皮肤内部中间脊结构,同时增大传感器的有效面积,同样外力下会产生更多极化电荷[9]。PVDF压电薄膜附在下凸点铜箔层表面,各压电薄膜下凸点敏感单元仿生人体皮肤中的迈纳斯小体,迈纳斯小体可快速响应3~40 Hz低频动态范围窄的外界刺激,人体皮肤内大量多种感受器可慢响应低频0.4~3.0 Hz、快响应高频40~100 Hz持续向下的压力,横向皮肤拉伸和皮肤滑动等外界刺激,压电薄膜一般动态响应宽为0.1~200 Hz,满足仿生设计要求[10]。导电极由薄铜片和漆包线组成,将信号线从压电薄膜正、负两导电极引出,橡胶弹性基底具有粘弹性,传递信号时可减少载荷能量在传导过程中的消耗。
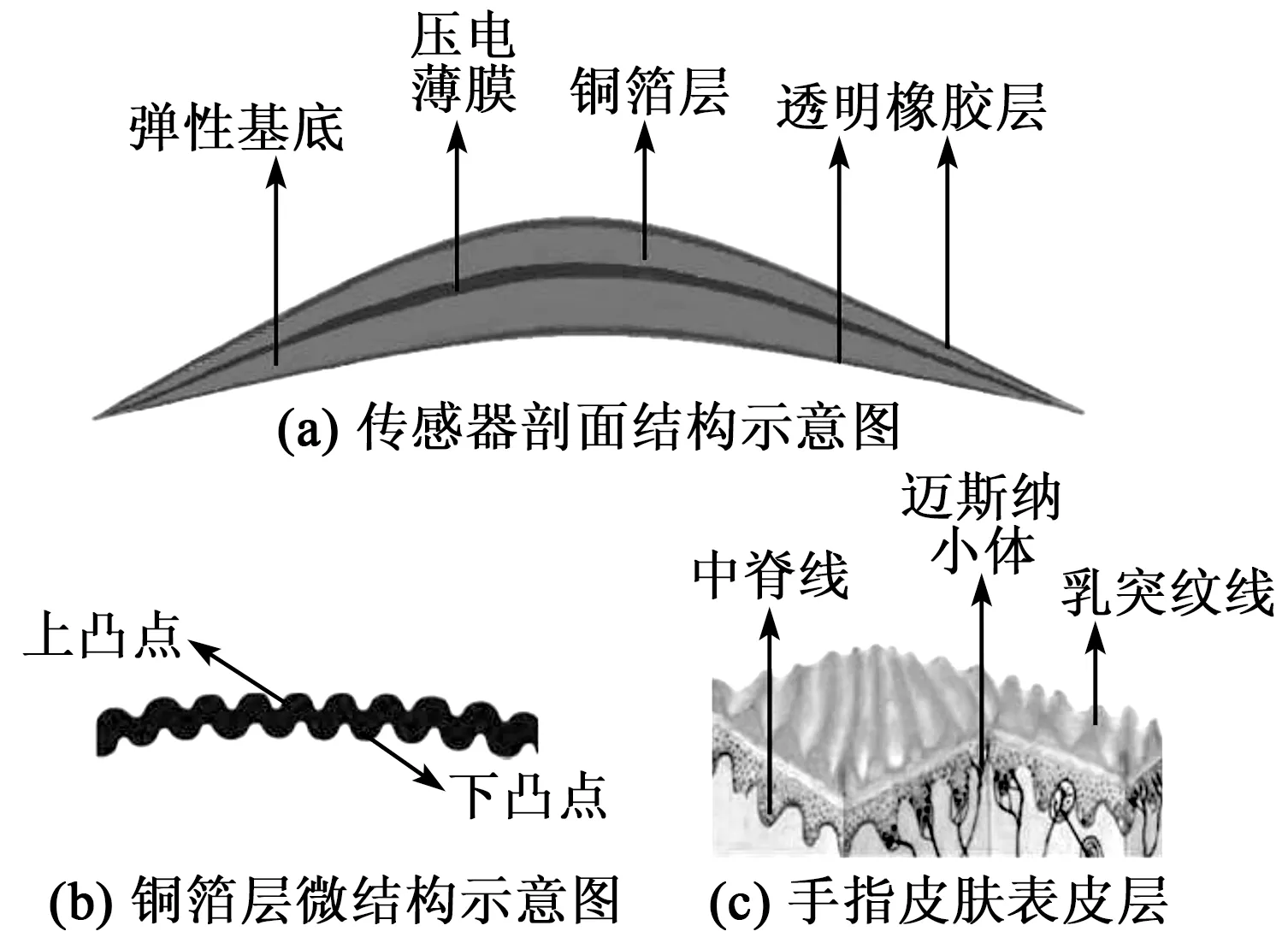
图4 双凸点拱形传感器结构示意图
2 信号调理电路设计
图5为信号调理电路,包括电荷放大、电压放大、低通滤波、电压抬升及电压反馈跟随等设计。图中,电路将传感器采集到的电荷信号放大转换为电压信号,放大器A0选用CA3140型号,可实现高阻抗输入转换为低阻抗输出,设计积分电容C1及电阻R1,使电路具备负反馈作用,调节R4实现电压信号稳定放大,设计二阶低通滤波电路,使输入高频信号对数幅频特性以-40 dB/分倍频速度下降,为后续软件滤波降低难度。电路设计电压抬升功能,根据采集到信号的强弱,通过调节R13将电压信号进行抬升,便于后续MSP430F149单片机识别处理。为减轻信号源影响,提高带负载能力,设计电压跟随电路,可稳定电压、增强品质因数。为满足系统集成化高,体积小的要求,选用内部集成4个运算放大器的OPA4347芯片[11],通过P2插口将模拟信号经单片机数据采样转换后,传送给上位机。
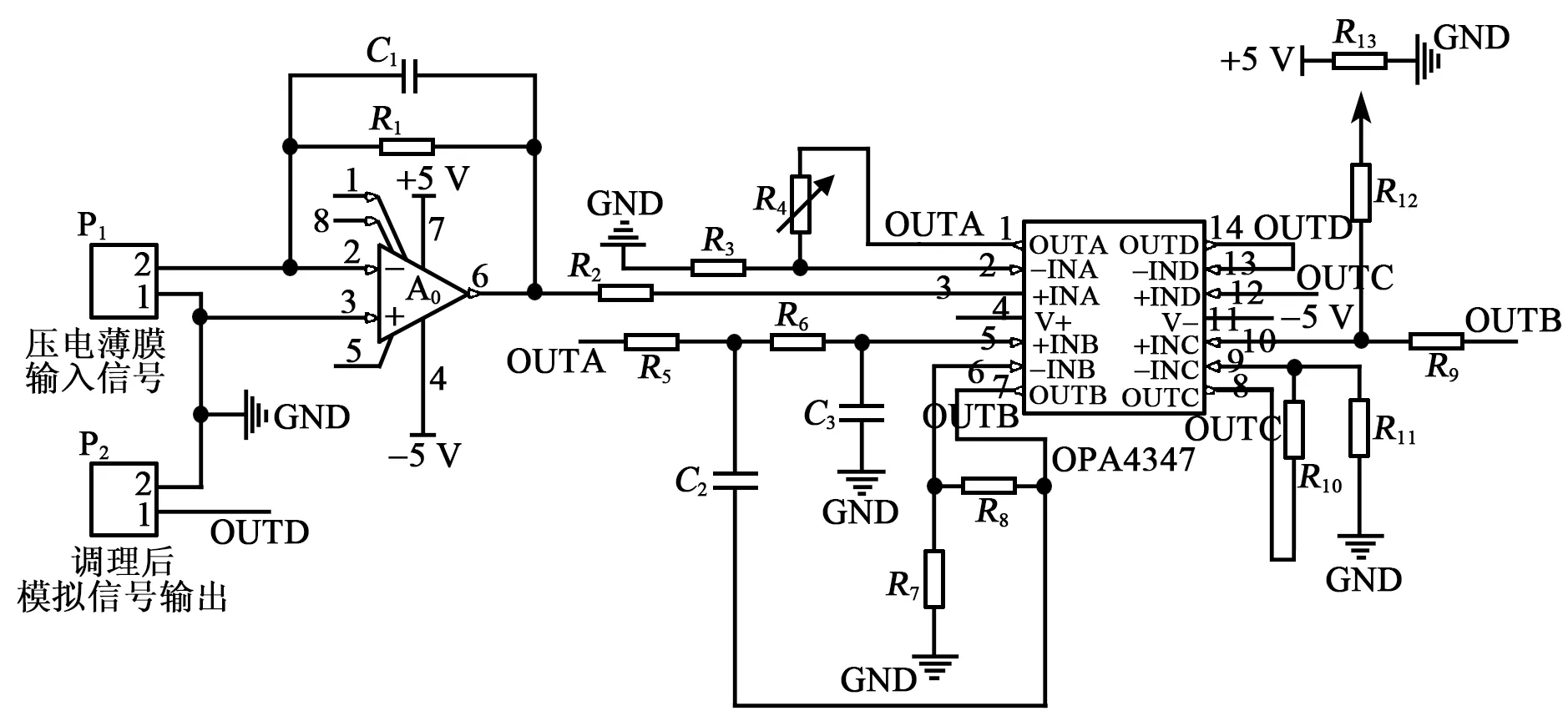
图5 信号调理电路PCB原理图
3 软件设计
经硬件电路调理后,模拟信号由单片机MSP430F149处理转换为数字信号,再经串口通讯传送给上位机,数据存储在特定文件中,由LabVIEW处理数显[12]。如图6所示,LabVIEW程序设计存储控件,便于信号数据的收集存储;程序添加级数可调的低通滤波器,极大地优化信号、去除噪声;为了分析信号的频域特征,程序添加幅频特性控件;同时,程序设计指示灯控件、信号类型显示窗口及幅值显示窗口,辨别采集数据的类型大小。为判断触觉信号、滑觉信号及热觉信号,程序采用阈值法,瞬间触碰传感器使得信号幅值突变、响应持续性差,因此,信号幅值均值大小可判定传感器检测到触觉信号;平稳滑动传感器使信号输出幅值稳定,根据信号幅值方差可判定传感器检测到滑觉信号;由信号的幅频值来设定频率阈值、幅度阈值,判断热觉信号。程序前面板设置输出信号波形图显示窗口、信号幅频特性曲线显示窗口、接口配置单元及触滑热觉信号判别指示灯等。
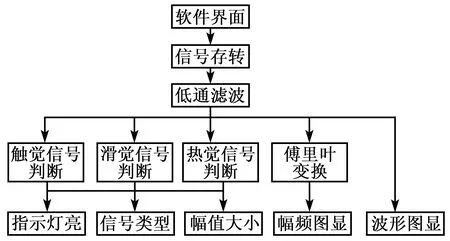
图6 LabVIEW程序设计框图
4 系统测试实验
4.1 传感器灵敏度对比测试分析
制作3种不同铜箔层凸点结构,其他条件全部相同的传感器:无凸点拱形[13]、上凸点拱形(凸点层在接触物体一侧)及双凸点拱形传感器。在同样实验装置环境下,分析各结构传感器的输出信号,计算对比灵敏度高低,传感器对比实验装置图如图7所示。
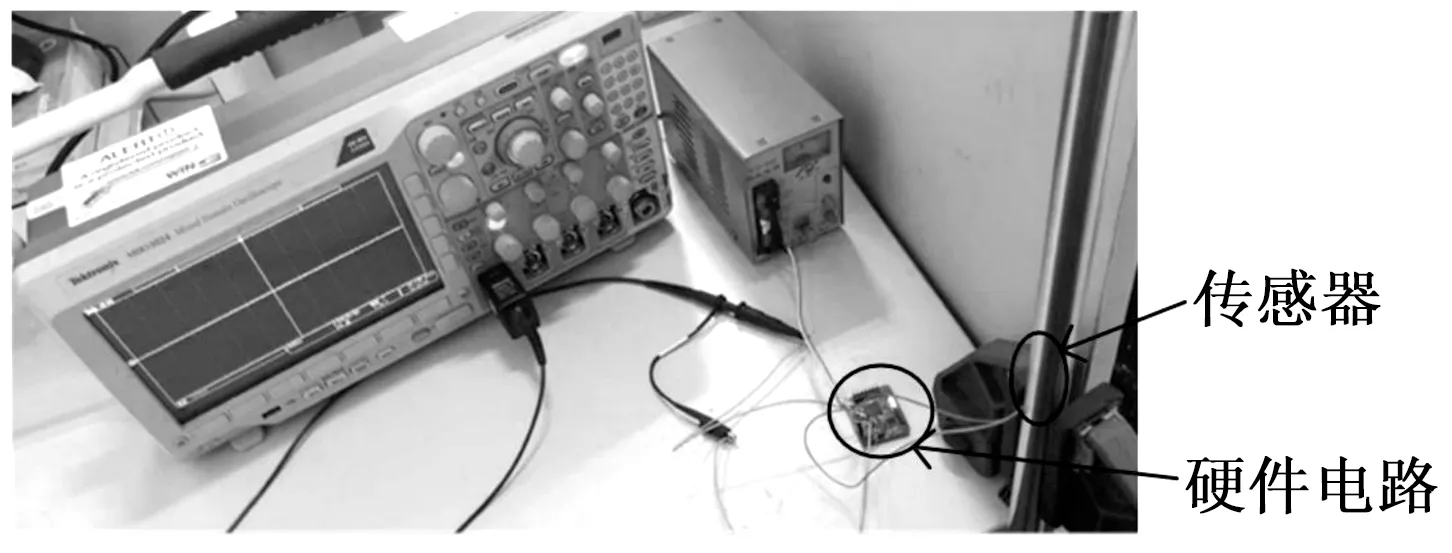
图7 传感器对比实验装置图
由图7可见,柱状物低碳钢棒与传感器铜箔层间摩擦系数(μ)为0.56,±5 V直流电源给硬件调理电路供电。钢棒在下滑时与夹持器固定端处的传感器产生摩擦接触,将传感器采集到的电荷信号经硬件电路信号放大、滤波等调理后,传输到示波器中存储下来,对检测到的数据用Origin软件进行分析处理,图8为放大信号波形图。
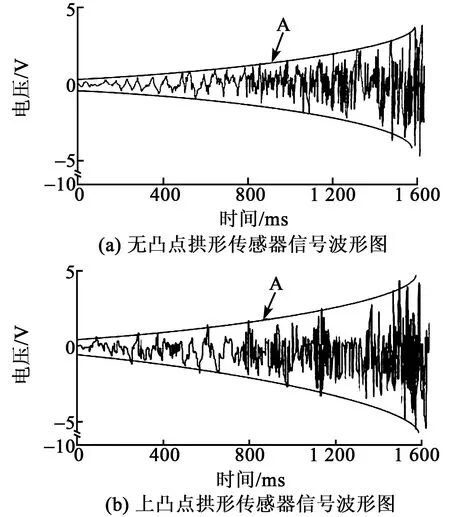
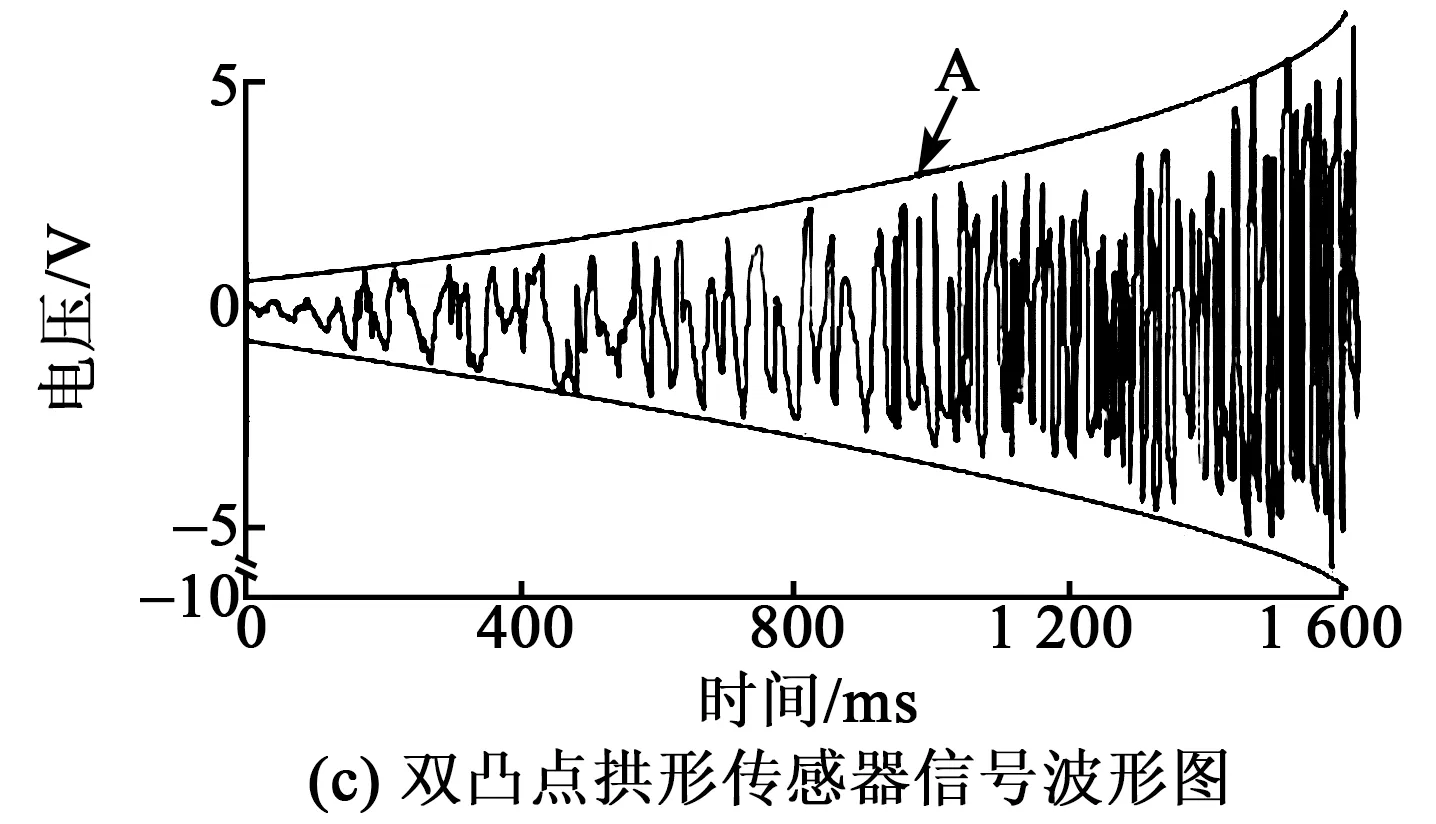
图8 各传感器采集信号输出波形图
图8中,包络线A表示输出信号幅值趋势走向。输出信号幅值随时间越来越大,呈线性关系,经过一定时间Δt,对比输出幅值ΔV的大小,判别各传感器灵敏度高低。钢棒下滑触碰传感器,并匀加速滑动摩擦,使传感器平稳对称振动,产生形变;采集到正、负电信号,幅值大小总体成对称分布。对3种结构的传感器放大输出信号选取正向幅值对比分析如图9所示。

图9 各传感器输出信号正向幅值对比
图9中,曲线a、b、c分别表示双凸点拱形、上凸点拱形及无凸点拱形正向幅值曲线。实验初始,钢棒下滑瞬间触碰传感器,各传感器信号幅值突变,输出触觉信号,各传感器输出信号相同,表明3种结构传感器对触觉信号检测灵敏相同;而后钢棒下滑与传感器完全充分摩擦滑动,使各传感器平稳振动,在400 ms后,各传感器检测到滑觉信号,曲线a信号幅值大于曲线b、c,证明同一时间处,双凸点拱形结构传感器信号输出幅值最大,其灵敏度更高;各传感器采集信号同时反应了传感器与钢棒接触不完全均匀,但不影响输出信号整体趋势走向,质量m、重力G的钢棒,以初速度v在时间t内匀加速下滑距离L,压力F垂直于传感器,由牛顿力学运动原理可知:
(1)
该传感器在F作用下输出电压信号V,则其灵敏度S为
S=V/F
(2)
在1 600 ms处各传感器振动平稳,与下滑钢棒摩擦充分,外界干扰小,此时计算得出3种不同结构传感器对滑觉信号检测灵敏系数分别为2.81×10-2V/(m·N)、3.22×10-2V/(m·N)、3.84×10-2V/(m·N),则双凸点拱形结构传感器灵敏系数是无凸点拱形结构传感器的1.36倍,是上凸点拱形结构传感器的1.19倍,双凸点拱形结构提高了触觉传感器灵敏度,更适宜作为前端信号采集单元。
4.2 系统测试
下位机采集到数据传送给上位机,上位机LabVIEW检测分析程序串口配置选为虚拟COM6串口,每秒波特率为9 600,无奇偶校验,数据位选用扩展ASCII8位及1.0停止位[14]。室温25 ℃,将双凸点拱形传感器放在水平放置的低碳钢棒上,反复匀速地在水平方向滑动传感器,观测前面板显示窗口,其输出波形如图10所示。
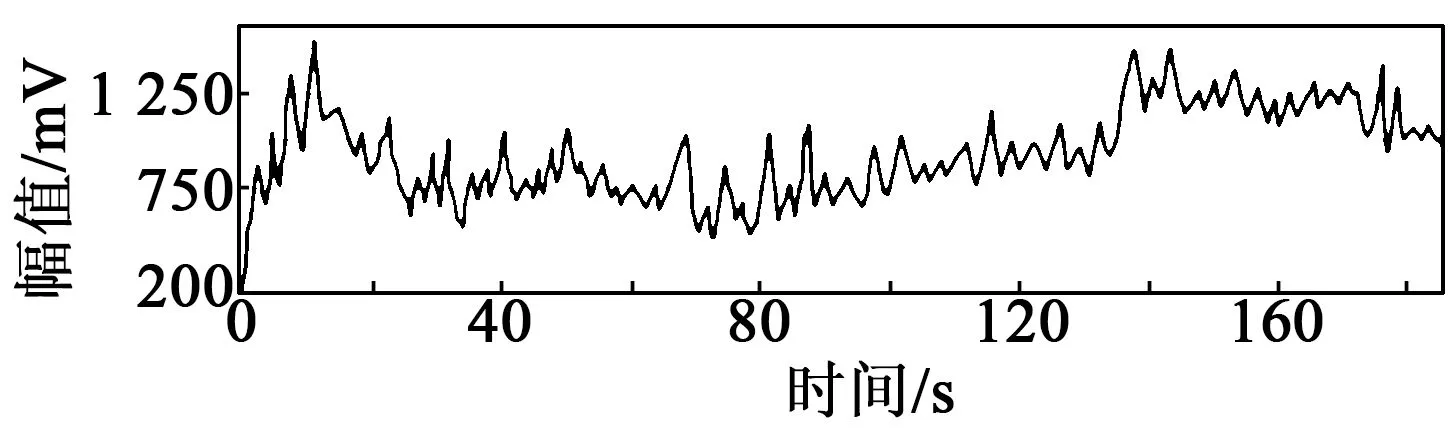
图10 信号输出波形显示窗口
由图10可见,传感器刚触碰到钢棒时,受力使得传感器形变,产生电信号,且信号突变,幅值增大为触觉信号,同时滑动传感器,系统检测到触觉信号和滑觉信号的叠加信号,在10 s处信号幅值最大;而后传感器与钢棒充分接触,且单一水平滑动,传感器触觉信号消失,程序仅检测到滑觉信号;约在120 s给低碳钢棒加热,PVDF具有高热电性,传感器输出信号骤升,此时传感器仍在滑动,程序检测到滑觉和热觉的叠加信号,信号幅频特性曲线如图11所示;130 s停止加热后,钢棒与外界环境热交换,钢棒温度慢慢下降,传感器检测到的热觉信号减小,输出叠加信号亦减小;在180 s后,由于单一匀速滑动传感器,此时系统仅检测到滑觉信号。
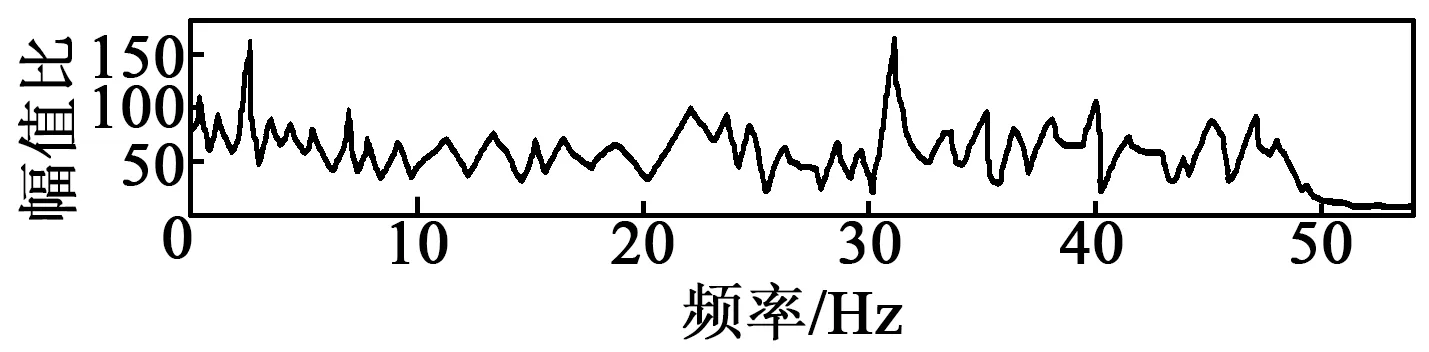
图11 信号幅频特性显示窗口
热觉信号频率为0.1~2.5 Hz,滑动信号频率高于10 Hz[15-16],图11中在0~3 Hz及20 Hz附近信号较强,表明实验120 s时钢棒温度升高,系统检测到传感器的热觉信号、滑觉信号。此时,LabVIEW前面板显示窗口中滑觉信号、热觉信号指示灯亮,程序对采集数据傅里叶变换等进行计算处理,得出滑觉信号幅度为766.31 mV、热觉信号幅度为1 262.29 mV,各频率信号幅值比在50 dB附近震荡,表明经调理电路、LabVIEW程序处理后,传感器输出信号得到增强,系统可以实时检测数显传感器滑觉及热觉信号幅值,系统前置调理电路低通滤波及程序设置滤波截止频率为50 Hz,极大地抑制了工频干扰,减少外界噪声影响。
5 结束语
从人体皮肤触觉感知及表皮层结构出发,依据PVDF压电薄膜压电效应原理,设计上、下层铜箔凸点,制作了双凸点拱形结构传感器。通过传感器对比测试实验,相比国内其他拱形结构传感器,该结构传感器的滑觉信号检测灵敏系数得到提升,增强了触觉传感器与物质滑动摩擦信号、识别物质纹理能力,提高了传感器触碰感知外界物质性能;系统优化、集成了下位机信号调理电路,且设计LabVIEW软件对信号数据读取分析、滤波处理,实时显示输出信号波形图,通过傅里叶变换等处理,采用阈值分析法判断数显传感器触滑热觉信号,该系统可广泛应用于仿生皮肤等机械装置上,实现机械的人工智能化,同时在航天航空、医疗健康、智能制造等领域,有一定的应用前景。
猜你喜欢
海外星云(2021年6期)2021-10-14
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
趣味(数学)(2019年10期)2020-01-15
小天使·三年级语数英综合(2020年2期)2020-01-13
时代英语·高一(2019年5期)2019-09-03
山东冶金(2019年3期)2019-02-17
现代装饰(2018年11期)2018-11-22
特别健康(2018年3期)2018-07-04
现代矿业(2018年4期)2018-05-09
时代英语·高一(2017年4期)2017-08-09