
一种瓶装药品抓取末端执行器的研究
2019-06-24 12:28姚志英吴梦委姚滢滢
制造业自动化 2019年2期
姚志英,吴梦委,2,姚滢滢
(1.北京物资学院 物流学院,北京 101149;2.北京交通大学 机械于电子控制工程学院,北京 100044)
0 引言
随着信息技术的发展,物流行业智能化程度越来越高,而行业对智能化提出了更高的要求,尤其是在物流生产过程中,对物流分拣速度和效率的要求越来越高。而影响物流分拣的最关键因素就是分拣执行机构的效率。为此有关分拣机械手末端执行器的研究成为一个热点,大家都想方设法通过优化末端执行器的性能来提高其效率。目前国内外的学者在这方面已取得了一定阶段性成果。鲍秀兰和张磊等针对家禽静膛操作空间小,操作要求灵活等特点,研究了三指三关节家禽自动静膛末端执行器。权龙哲和赵琳等为了实现同一机械手柔性抓取各种形状果蔬的目标,设计了一种基于仿生原理的多功能蜓爪式末端执行器。张建宝等应用气动人工肌肉设计了一种结构简单、运动灵活、柔性作业的多手指刚柔混联的草莓采摘末端执行器。徐丽明等基于欠驱动原理设计了一种双V型手指脐橙采摘机器人末端执行器,实现脐橙的无损伤采摘。张炜等针对穴盘移栽末端执行器存在夹持角度不可调、结构负载等问题,设计了一种三指式移栽末端执行器,通过理论仿真和实验验证了所设计的末端执行器可以满足移栽运动的要求。刘佳等设计了一种以驱动位移控制进行夹取力控制的柔性机械手,并以不同尺寸的草莓为夹取目标,对柔性机械手的夹取过程进行动力学研究,研究夹取力的变化规律,验证了所研究的机械手可实现目标的无损快速抓取。张炳超等针对番木瓜采摘机械化程度低、作业复杂等特点,设计了基于欠驱动原理的番木瓜采摘末端执行器。韩亮亮等针对中小型自移动空间机械臂在轨操作和“换位行走”的任务需求,研制了一种小型化、大容差、高刚度可靠连接的末端执行器,并通过ADMAS建立虚拟样机,通过对样机进行实验,验证了设计的可行性及仿真的准确性。肖英奎等研究了具有三个旋转关节自由度的采摘机械臂用于农业果蔬采摘。邵铁锋等按照象鼻结构和运动仿生学原理,设计了一种象鼻型水果采摘机械手。事实上有关适合于不同场景、不同用途的机械手及末端执行器的研究成果还有很多,但总体而言需要针对不同具体的应用及环境进行设计,没有一种可以应用于不同工况环境、不同用途的标准型末端执行器。
本文将研究一种适合于瓶装类药品自动分拣机械手的末端执行器;首先针对瓶装药的特点设计了柔性末端执行器,并构建了末端执行器的电机模型,设计了末端执行器的非光滑控制器,并进行了仿真实验验证,籍于此实现瓶装类药品的稳定分拣。
1 瓶装类药品分拣末端执行器设计
1.1 瓶装药分拣的影响因素分析
有关药品分拣研究的文献相对较少,仅有的几篇文章也是针对盒装药品分拣的研究。事实上盒装药和瓶装药是截然不同的两个分拣对象,众所周知瓶装药比盒装药表面光滑,而且大部分情况下单瓶瓶装药比单盒盒装药的重量要重;同时瓶装药在分拣过程中必须要轻拿轻放,分拣过程瓶装药的振荡幅度不能过大;此外在分拣抓取过程中,要求抓取设备必须不能因出现松懈打滑现象而导致瓶装药从抓取器中脱落。当然还有诸如药瓶本身的抗压能力、药瓶的摩擦系数、瓶内药物的重量等因素影响着瓶装药分拣末端执行器的设计。
1.2 瓶装药分拣末端执行器的设计
根据设计的结构和原理,机械手的末端执行器一般分为机械夹持式、吸附式末端执行器和特种工具三种类型,其中机械夹持式末端执行器一般为两指或多指手爪型;而吸附式末端执行器一般适应于体积规则、重量轻的分拣场合;特种工具是即在特殊场合下使用的执行器,如焊枪、喷嘴、电磨头等。在充分考虑了瓶装药自身的特性、瓶装药分拣过程的工况环境以及分拣抓取过程特性,我们研究设计夹持式的末端执行器,具体如图1所示。其中仿生手指1是执行瓶装药物抓取的执行单元;主体壁2是保护仿生手指,阻止仿生手指在横向方向的运动;销轴3用于将仿生手指和连接杆相连,同时连接杆和滑动主体之间也通过销轴相连;支架4是末端执行器构件的支撑载体,也是末端执行器与机械臂连接的载体;驱动电机5是末端执行器纵向运动的驱动部件;顶盖6是固定滑动主体纵向移动的部件,限定滑动主体纵向移动过程中最大行程;滑动主体7是末端执行器纵向移动的部件,便于在实际使用中根据药品的情况调整仿生手指的张度;连接杆8一端与仿生手指相连,一端与滑动主体相连;电机轴9一端连接电机,另一端连接滑动主体。
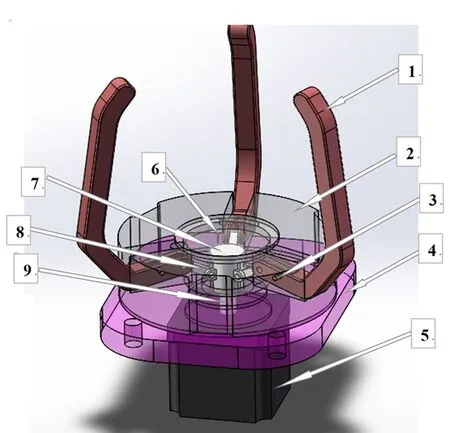
图1 末端执行器的结构示意图
1.3 瓶装药分拣末端执行器的运动分析
为了方便分析,根据末端执行器的设计原理及结构,我们将模型简化滑块连杆结构,具体如图2所示。其中1为电机输出轴,2为滑动主体,3为连接杆,4为仿生手指,5为销轴。根据图2可知,活动构件数目为3,底副的数目为4,高副数目为0,故所设计末端执行器机构的自由度为1,当电机输出轴驱动滑动主体向上运动时,可实现手指的张开运动,当电机输出轴驱动滑动主体向下运动时,可实现手指的闭合,这样通过滑动主体的运动实现仿生手指的张开与闭合。
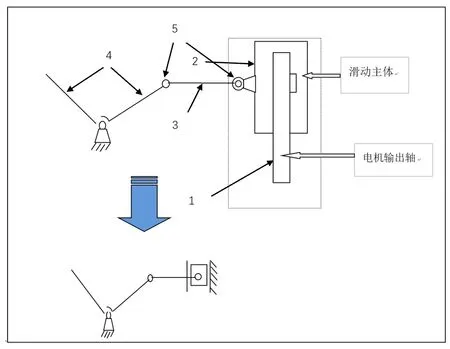
图2 末端执行器运动分析简化模型
1.4 所研究瓶装药分拣末端执行器的特点
1)所设计的末端执行器属于指尖抓取器,利用三个指尖进行抓取,为了保证在抓取过程中减少药品的振荡,所设计的手指成爪型,且手指关节不能进行运动,这样保证抓取中手指形状稳定不变,在一定程度上避免了抓取过程中振荡;
2)为了避免在抓取过程中指尖和瓶体之间出现松动打滑的现象,在手指的表面增加了一层橡胶颗粒材料,通过橡胶颗粒来增加手指的摩擦系数,增大手指和瓶体间的摩擦力。
3)为了控制手指的张度和保证在抓取过程中手指张度的稳定性,采取了通过销轴死锁和顶盖限制的方式,确保在抓取过程手指的张度不变。
4)所设计的末端执行器可抓取实现不同直径瓶装药的柔性抓取,我们通过ADAMS软件研究仿生手指的抓取轨迹,如图3所示,由图3可知所设计的末端执行器可以抓取直径为74毫米到145毫米的药瓶。
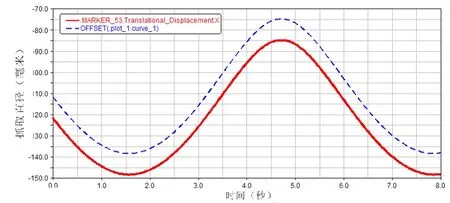
图3 瓶装药分拣末端执行器
5)所设计的末端执行器可对不同重量的瓶装药实现柔性抓取。按照直径为90毫米、容量为100毫升、玻璃材质的药瓶,设液体的密度与水的密度相当,那么装满药的药瓶总重量约为1.5千克,通过ADAMS构建了图4所示的末端执行器抓取力学仿真模型,然后通过不断调节电机转速来控输出轴的位移,进而控制手指的夹取力,画出手指接触点的力曲线如图5所示。由图可知指尖接触最大可达40N,而测试对象的重量为14.7N,仿生手指完全可以实现对测试对象的抓取,同时佐证了手指可以抓取重量为40N内的瓶装药。
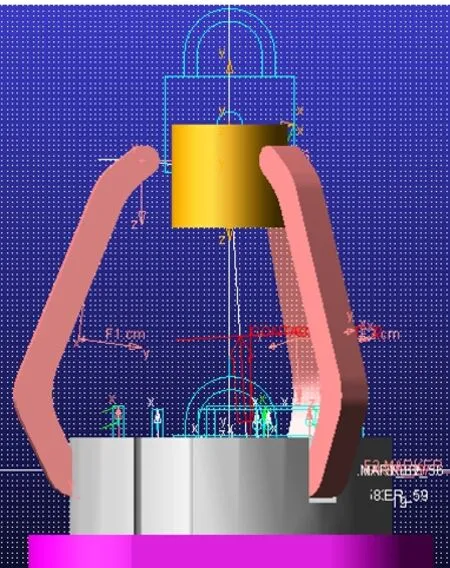
图4 模型执行抓取力学模型
2 瓶装类药品分拣末端执行器控制
瓶装药瓶分拣末端执行器的控制主要图5手指接触点的力曲线是对仿生手指的控制。根据本文前面的研究可知,仿生手指的控制采取电机控制,因此本部分内容主要是电机控制,拟以非光滑控制理论为基础,设计一种快速稳定的非光滑控制器进行电机的控制。
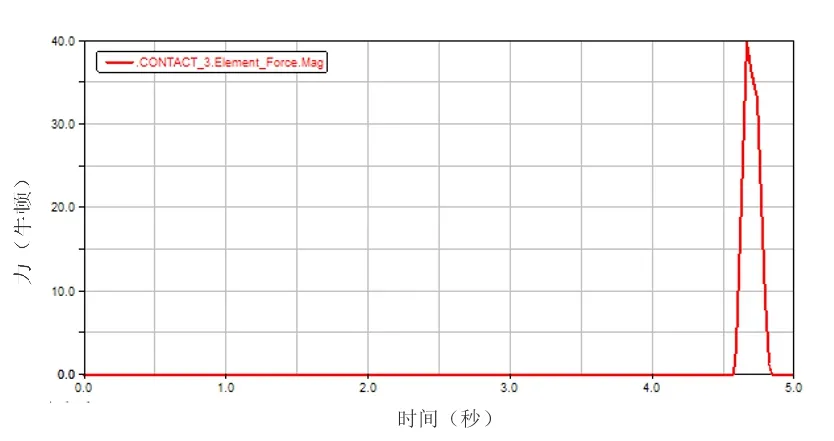
图5 手指接触点的力曲线
2.1 末端执行器的电机
根据本文的研究对象,结合直线直流电机运行效率高、控制方式简单灵活、可与闭环控制系统组合实现位移、速度和加速度的精确控制等特点,我们选择了永磁式直线直流电机,电机的型号为AUM2-S4,电机的部分参数如表1所示;通过计算,直线电机的最大推力45N,持续推力为29.4N,完全满足本文所研究末端执行器的负载要求。
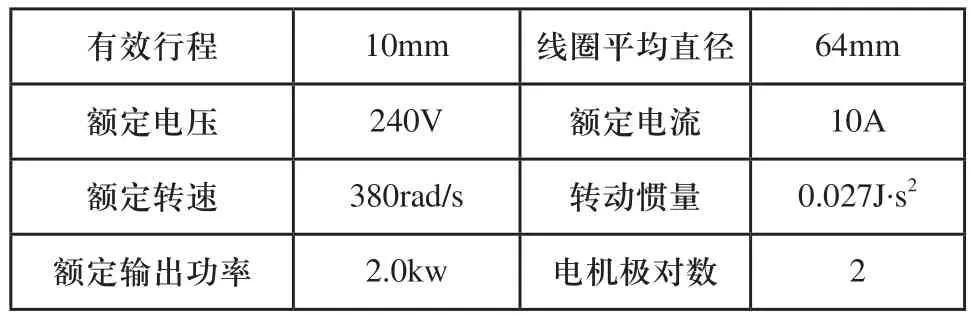
表1 电机的部分参数
2.2 电机的数学模型
根据电机的电压方程和机械动力方程,得到如公式1所示的电机二阶控制模型,其中Ce为电机电势系数,Tm为机械时间常数,Ta为电气时间常数。结合所选择电机的使用手册和参考文献[14]中相关内容,电机的数学模型为式(2)。

2.3 电机非光滑控制器
与线性控制技术和非线性控制技术相比,非光滑控制技术具有无可比拟的快速性、稳定性和强扰动抑制性,为此在课题组前期相关研究成果的基础上,结合电机的控制模型,我们设计如图6所示的电机非光滑控制器,由图可知电机非光滑控制器由非光滑PID控制器和非光滑负反馈控制器组成。其中非光滑PID控制器的数学表达式为式(3),式中kp为比例系数,kd为微分系数,0<2αp+1=np/mp<1,np为奇数,mp为正数,np与mp为互质数,0<αd<1;非光滑负反馈控制器的表达式为公式(4),式中kf1和kf2为反馈系数,y为电机的输出可测量,0<2α1f+1=n1f/m1f<1,n1f为奇数,m1f为正数,n1f与m1f为互质数,0<αf<1。

图6 电机非光滑控制器


应用MATLAB构建的末端执行器电器非光滑控制器仿真模型,进行性能测试,并比较其与线性PID控制器对阶跃信号的响应结果,其结果如图7所示,性能如表2所示,测试过程中各个参数值如表3所示。由测试可得所设计的非光滑PID控制器具有较好的控制性能,可实现末端执行器的快速稳定控制。
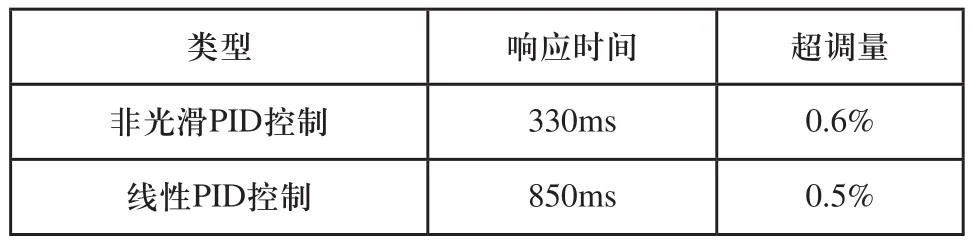
表2 非光滑PID控制器的性能

表3 各个参数值
由于在实际使用过程中,末端执行器易受到外界干扰的影响,通过进一步研究,将扰动分为两种类型,一种扰动为常值扰动,在分拣过程中由分拣传输带的振动等原因所引起的扰动,在某一时段内持续存在,我们将其近似为常值扰动;另一种扰动为随机扰动,这种扰动是在分拣过程中随机出现的一些白噪声扰动。为了进一步验证所研究的非光滑控制器的扰动抑制能力,我们分别将式(5)所示的常值扰动和图8所示的随机扰动叠加到控制器的输入中,检验其扰动抑制性能,其结果分别如图9和图10所示,由图9可知对于常值扰动非光滑PID控制器的扰动抑制率可到92%,而线性PID控制器的扰动抑制率接近92%;由图10可知所研究的非光滑PID控制器对随机扰动抑制率可达95%以上,而普通PID控制器对随机扰动抑制率低于90%。总之非光滑PID控制器具有较好的扰动抑制率。
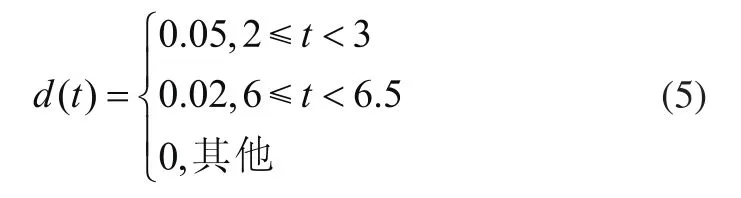
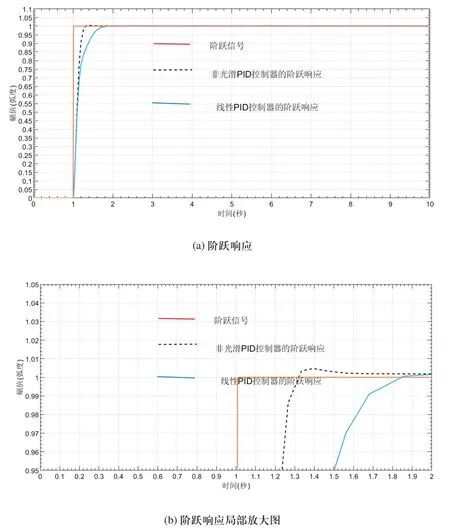
图7 阶跃响应

图8 随机扰动


图9 常值扰动下的阶跃响应
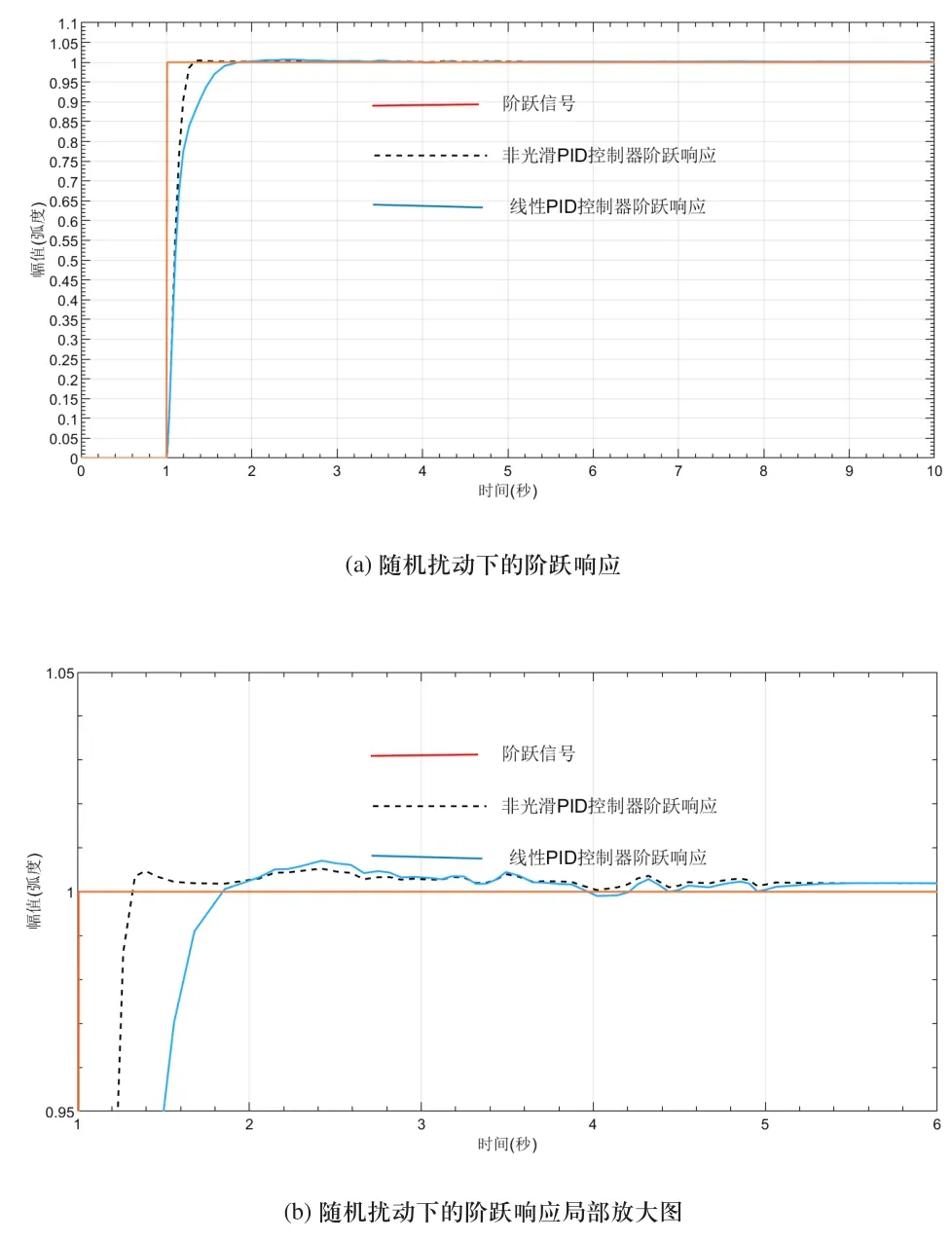
图10 随机扰动下不同控制器的阶跃响应
通过上述研究可知,所设计的末端执行器非光滑PID控制器具有响应时间快、扰动抑制率高等特点,可以很好地实现对瓶装药分拣末端执行器的快速稳定控制。
3 结论
本文针为瓶装药自动分拣生产线研究了一种末端抓取执行器。在分析影响瓶装药分拣因素的基础上,设计了一种仿生手指型夹持式的瓶装药瓶抓取末端执行器;分析了末端执行器的运动和特征,研究证实这种执行器可实现直径74mm~145mm、重量在40N以内瓶装药的柔性抓取,从机械特性保证了药瓶抓取过程的末端执行器的稳定性;研究了末端执行器的非光滑控制;在选择控制电机的基础上,研究了电机的数学模型;基于非光滑控制理论设计了模型执行器非光滑PID控制器,并通过MATLAB仿真,比较了非光滑PID控制器和线性PID控制器的性能以及对药瓶抓取过程中不同扰动的抑制情况,验证了非光滑PID控制器可实现末端执行器的快速、稳定控制,并可以很好地抑制药瓶抓取过程中各种扰动。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
汽车实用技术(2022年15期)2022-08-19
哈尔滨轴承(2020年3期)2021-01-26
诗选刊(2020年3期)2020-03-23
电子制作(2019年13期)2020-01-14
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2019年8期)2019-09-03
汽车维修技师(2019年2期)2019-08-23
环球时报(2019-07-18)2019-07-18
大众健康(2015年6期)2015-06-16
