
基于细粒度指纹的室内定位系统
2019-06-22 08:32田熙燕杜留锋
应用科学学报 2019年3期
田熙燕, 杜留锋
1.河南科技学院机电学院,河南新乡453003 2.南京邮电大学通信与信息工程学院,南京210003
伴随无线感知技术的发展,室内基于位置服务(location-based services,LBS)的需求如物流仓库货物管理、医院特护病人跟踪等急剧增长,室内无线定位技术受到了广泛关注.而室内普遍的非视距(non line-of-sight,NLoS)环境导致信号在传输中更易受到多径效应和阴影效应等负面影响.因此设计一个精度高、鲁棒性强且实时的室内定位系统非常必要.
近年来,基于Wi-Fi 的指纹定位技术越来越受到关注,主要受益于两点:1)相对于几何测量法,指纹技术受NLoS 影响较小,能满足大部分LBS 的精度要求;2)大多室内场所已遍布无线访问点(access point,AP),Wi-Fi 信号覆盖率高.此外,由于Wi-Fi 接收信号强度(received signal strength indicator,RSSI)可在大多的移动终端上被采集,无需额外的硬件[1],因而RSSI 成为了首选的位置指纹.然而,RSSI 是数据包级的功率参数,在复杂的室内场景下,其描述能量强度-收发间距(能-距)关系时常呈现出较大的随机性,这使得基于RSSI的定位系统难以满足更高的要求[2].
目前,融合正交频分复用(orthogonal frequency division multiplexing,OFDM)、多入多出(multiple-input multiple-output,MIMO)和信道绑定等技术的IEEE 802.11n[3]已成为WLAN 的主导标准.在Wi-Fi 常用的2.4GHz/20MHz 信道模式下,OFDM 调制的子载波(子信道)数达到了56 个(52 个用于传输数据),如图1所示.利用修改固件后的无线网卡(如Intel 5300[4]、Atheors 9k[5])可以解析出子载波的频响采样值,这些采样值即为信道状态信息(channel state information,CSI)[4].CSI 表征了信道的频率分集,提供了子载波频域下的幅度和相位值,细粒度级地刻画了物理层.此外,CSI 分别对MIMO 下不同天线对的子载波进行记录,使其同时具备了表征信道空间分集的能力.因此,相比于RSSI,CSI 具有更小的时间波动,能-距表达更稳定[6].
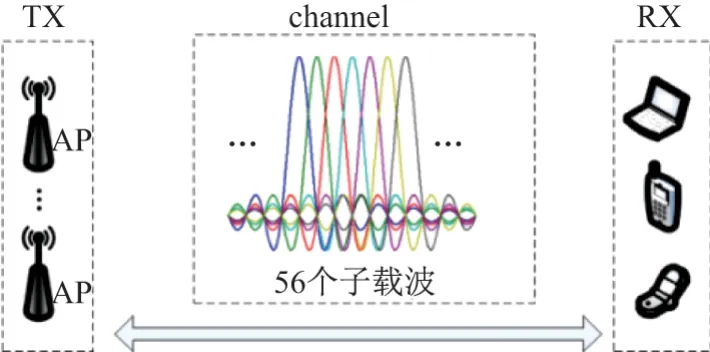
图1 IEEE 802.11n (2.4 GHz/20 MHz)下Wi-Fi传输模型Figure1 Wi-Fi transmission model in IEEE 802.11n standard (2.4 GHz/20 MHz)
1 相关工作
近年来,一些将CSI 作为位置指纹的系统在定位的精度和稳定性上均得到了较好的结果.较早的PinLoc 系统[7]在Wi-Fi 环境下借助解析出的原始CSI 以接近0.9 的概率实现了米级精度.但其在离线阶段需对划分的全部采样位置点进行指纹收集,工作量较大.最近提出的FIFS[8]、CSI-MIMO[9]及DeepFi[10]方案均利用了CSI 的频率分集和空间分集,大大提高了指纹的稳定性.在指纹的设计上,FIFS 将各子载波的多个原始CSI 进行幅度平均,然后进行子载波叠加生成指纹;CSI-MIMO 对聚合了CSI 幅度和相位信息的矩阵进行前向差分,生成一个混合指纹.在线定位阶段的两系统均基于贝叶斯准则在设定的场景下取得了约1 m 的精度.DeepFi 利用深度学习模型尝试了用深层网络的权值表征指纹的工作.其在离线阶段选取CSI原始幅值作为输入训练网络,在线阶段基于径向基函数实现指纹匹配.DeepFi 借助深层网络的强非线性拟合能力取得了较优结果,但需要巨大的训练成本.
位置指纹是决定系统性能优劣的根本,理想指纹应具备同采样点波动小、异位置区分度大的特征.CSI 受限于目前主流Wi-Fi 的信道带宽,文献[2,11]指出如不对指纹精心设计,基于CSI 系统的精度很难触及米级以下.鉴于此,本文首先从CSI 原始值的预处理入手,设计了一种较优的指纹构造方法;其次,将采样点划分后的定位区域,抽象为一个位置-指纹矩阵(location-fingerprint matrix,LFM),用矩阵元素表示采样点指纹,LFM 即指纹库;此外,为减轻离线阶段全采法构建指纹库的繁重工作[12],本文基于矩阵完备(matrix completion,MC)[13]理论,提出了离线阶段高效的指纹建库方案.在线阶段借助贝叶斯准则执行了指纹匹配[14];最后在两个典型的室内环境下对所提方案进行了评测,实验的结果显示了提案的优良性.
2 位置指纹构造
2.1 CSI
室内无线环境下,利用IEEE 802.11n 接收终端及802.11n-CSI Tool[15]可获取表征通信链路子信道的CSI,表示为

式中,H(fk)表示中心频率为fk的第k条子载波(子信道)的CSI;|H(fk)|表示子载波的幅度,∠H(fk)为相位.本文采用的终端为Intel 5300,在2.4 GHz/20 MHz 模式下,一个接收Packet 中可解析出30 个子载波的CSI,即K= 30.在MIMO 下,每对TX/RX 链路的天线组合均是一个空间信息流.因此,子载波k的CSI 可进一步表示为复矩阵

N和M分别代表发送天线(transmitting antenna,TA)和接收天线(receiving antenna,RA)的个数,当前主流MIMO 技术下N ∈{1,2,3},M=3.Hn,m表示第n个TA 到第m个RA 天线对的CSI.不同天线对代表不同路径,故式(2)中元素相异.
CSI 充分利用了MIMO-OFDM 的频率和时空分集,在对抗室内干扰时能呈现很好的鲁棒性.在空间区别度上,文献[7]已经证明了间隔1 m 的相异采样,采集的CSI 组合值具有很低的相关性.因此,CSI 十分契合位置指纹的核心要求.
2.2 CSI 有效值
无线终端初步获取的是一种表征值,称为CSI 原始值.本文结合接收Packet 中的RSSI、接收噪声及AGC 增益等信息,设计了一种相较原始值更稳定的表征值,称为CSI 有效值.转换方式如下:

式中,Heff为CSI 的有效值,Hraw为原始值.η为功率衰减因子,本文测试环境下,TA 数目N ∈{1,2,3}分别对应η ∈{1.0,1.4,1.7}.为M个RA 总的RSSI;Praw为各子载波的原始功率,大小为Hraw元素的幅度平方;为子载波的原始总功率.K=30,ε为量化噪声.
图2给出了静态实验室下,随机选取的4 个采样点L1~L4处CSI 的Hraw与Heff的对比.TA 和RA 分别取2 和3,各采样点收集有效Packets 为1 000 个.图2中,Amplitude 为各天线对CSI 的幅度平均.可以看出,与原始值相比有效值波动更小.基于Heff构造指纹能更有效地削弱NLoS 等引发的负面影响,有利于提高系统的整体性能.

图2 CSI原始值与有效值稳定性对比Figure2 Comparisons of stability between raw and effective values
2.3 CSI 指纹构造
为进一步提高鲁棒性,每个采样点将收集多个CSI,然后再将这些CSI 融合为唯一的位置指纹.目前在MIMO 下融合的方法主要有平均策略[8]和差分策略[9]两种,本文将采用平均策略.此外,尽管目前室内常为多AP 环境,但考虑到AP 不断提高的覆盖能力,以及多AP存在的重叠干扰现象[16],本文采用单AP 模式.文献[10-11]已证明,在覆盖力足够的前提下,单AP的效率和灵敏度更优.单AP 下采样点指纹表示为

式中,F为融合平均后的最终指纹.S为采集的有效Packets 总数,为CSI 有效值,M、N分别为TA、RA 数量,K为30.
3 指纹库构建
相较于几何法,指纹技术虽具有精度高、稳定性强等优点,但构建指纹库需要繁重的采集工作,严重阻碍了指纹定位的广泛应用.为了有效解决该问题,本节将借助矩阵完备理论来探寻提高建库效率的途径.
3.1 矩阵完备理论
如果元素缺失的矩阵具有低秩特征,且已知的测量值呈均匀随机分布,则通过满足受限等距特性的映射[13],就能够实现矩阵的精确补全,这一过程即矩阵完备.可描述为

式中,X为目标矩阵,大小W ×L,这里设W≤L;为仅含γ个测量值的待补全矩阵,即测量值矩阵.Ω为测量值位置的集合,|Ω|=γ <<W ×L.本文场景下,为仅含部分位置指纹的LFM,=Fw,l为获取的指纹值;X代表完备后完整的指纹库.
秩最小化算子是非凸的,求解式(5)是一个NP 难问题.由于核范数是秩函数在目标矩阵单位谱范数集合{X ∈RW×L:‖X‖2≤1}上的凸包络,故式(5)可松弛为[13]

式中,‖·‖∗和‖·‖F为核范数和Frobenius 范数.为X第i个奇异值.ξ为噪声.针对许多完备问题,如图像修复、无线传感网内目标定位等,式(6) 满足γ≥αrL1.2lnL后,X将以不低于1-β(L)-3的概率重构[17],这里α,β ∈(0,1)为环境参数,r为目标矩阵X的秩.
核范数最小化可通过半定规划(semidefinite programming,SDP)求解.近年来一些高效的迭代方法,如奇异值阈值法、奇异值投影法等[17],陆续应用于完备问题中并取得了很好的结果,这些均为本文的重要理论支持.
3.2 LFM 低秩特性
低秩性是矩阵实现精确完备的必要条件,而秩可以映射为矩阵非0 奇异值的个数.由于实测的LFM 受噪声污染,因而低秩判定可松弛为:近似0 的奇异值占比越小,矩阵低秩属性越强[13].CSI 作为描述能-距关系的参数,具有潜在单调性,因此可推测LFM 的元素间必隐含强相关行为,而这种相关性是低秩的前提,接下来将对该特性进行具体验证.
首先,针对研究室和实验室场景下获取的4 个矩阵(LFMs410、LFMd401、LFMs616和LFMs626)进行奇异值分解如下:

式中,σi为LFM 的奇异值,ui和vi分别为σi的左、右奇异向量.下标40 与66 分别对应教研室和实验室两种场景,上标s 和d 分别对应静态和动态两种环境,1 和2 表示AP 的天线数目.为直观展示奇异值的相对比重,绘制了4 个LFM 各奇异值的占比示意,见图3.
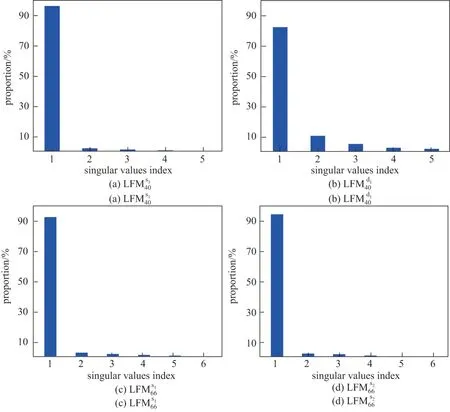
图3 LFM奇异值的占比示意Figure3 Proportion of singular values of LFMs
从图3可以看出,4 个LFM 的大部分能量均来自前位较大的奇异值,各矩阵首个奇异值的占比均超过了80%,由噪声等因素造成的近似0 的奇异值,总体占比很小.而图3(b)的动态场景矩阵,由于干扰较多造成前位奇异值占比相对不高.图3表明了实际场景下的指纹库LFM 具备近似低秩这一先验,从而使得基于MC 的高效指纹库构建成为可能.
3.3 指纹库构建方案
如前述,定位区域与LFM 的关系可表示为图4.
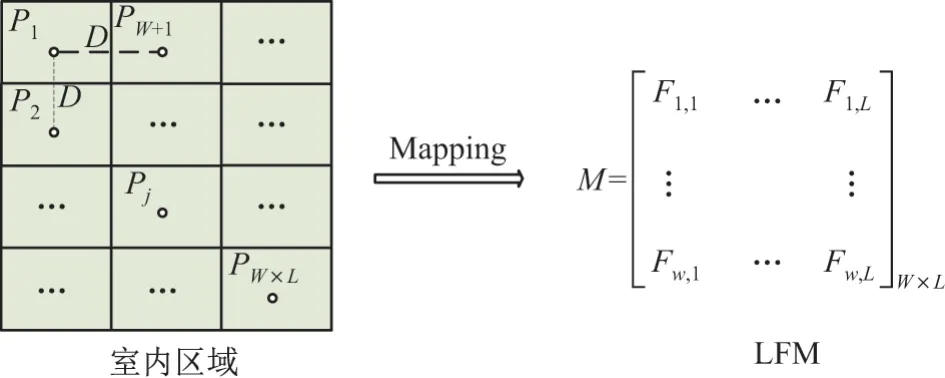
图4 LFM 映射示意Figure4 Mapping illustration for LFM
图4中,D为定位区域相邻采样点的间隔,通常设置为常数.M的行列对应室内的采样点划分,W和L分别表示两个平面方向上的采样点数.令元素Fw,l为采样点pj的指纹值,则任意行列坐标(w,l)与j的关系满足:j=w+(l-1)W.
传统的指纹库构建需要对全部的采样点进行采集,这往往需要巨大的工作量.鉴于LFM满足近似低秩约束,在建库时只对定位区域的少量位置点进行指纹收集,得到一个只含有部分测量值的待补全LFM,如式(8)所示,进而基于MC 理论对该矩阵执行完备运算,最终得到一个完整的指纹库.

式中,对应未采样点的元素设为0,Fw,l符合均匀随机分布,在实际收集过程中所选的采样点应满足这一条件.
显然,所提方案可大大减少离线阶段构建指纹库的工作量,且在大尺度定位区域背景下所带来的效率收益会更明显.而相对于一些传统的数据补全方法,如线性空间插值法等,MC更能充分利用矩阵的低秩性和元素之间的相关性.
4 在线指纹匹配
为实现定位,在线阶段需要将定位请求端(location request terminal,LRT)所采集的位置指纹与指纹库进行匹配.相比确定性匹配技术,基于概率的方法更能准确地提供结果[6].因此,本文设计了一种基于BR 的匹配方法,用以实现LRT 的位置估计.
依据BR,LRT 在未知位置lj的后验概率可表示为

式中,Flrt为LRT 在lj处按照式(4)获得的位置指纹,J=W ×L为采样点总数,Pr(lj)为LRT 处于位置lj的先验概率.不失一般性,设Pr(lj)满足均匀分布,即Pr(lj)=1/J;Pr(Flrt)不包含lj视为常量.因此后验概率问题式(9)转化为求解似然概率Pr(Flrt|lj),其高斯分布函数的逼近形式可表示为

式中,F为LFM 中的指纹值,σ2为方差.利用BR 和高斯模型,LRT 的最终估算位置,将由所有采样点的加权平均表示,即

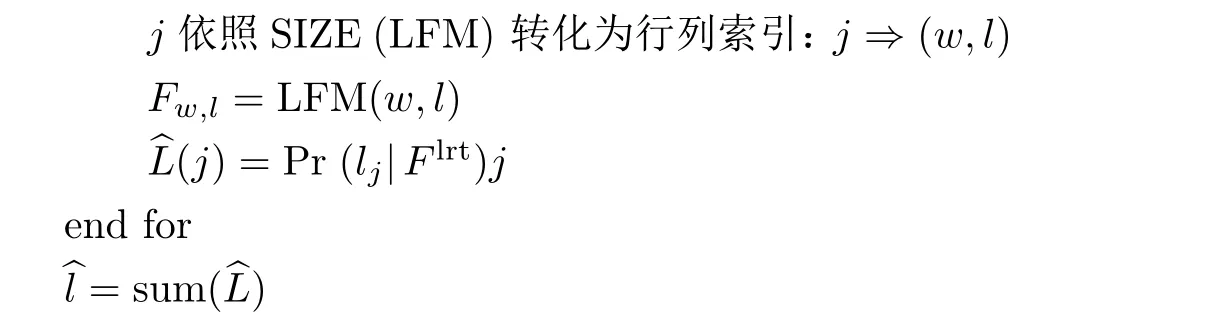
在线阶段指纹匹配的性能将在下文阐述,其实现过程见算法1.
算法1基于BR 的指纹匹配方法
输入LRT 在线获取的S个CSI 有效packets,指纹库LFM.
输出LRT 的估算位置l.
按照式(4)计算LRT 在线位置指纹Flrt,计算S个CSI 有效值方差σ2;

5 实验结果与评价
本节给出了场景设置;评测了所提指纹库构建方案的精确性和稳定性;综合评测了所提系统的定位性能,并与现有的同类技术进行了比较.
5.1 实验场景
评测的Wi-Fi 工模为2.4 GHz/20 MHz;AP 采用TL-WR 系列的742N、841 N 和882 N,TA 数N分为1、2、3,离地1.5 m;CSI 采集借助集成化平台“Wi-Fi 雷达系统”[19],RA 数为3,离地1 m,如图5所示.定位场景2 个:教研室和实验室,见图6.为兼顾丢包率和响应速度,离线阶段设置包的Ping 速为:N=1 时每秒100 个,N=2、3 时每秒50 个,在线阶段为每秒100 个.

图5 Wi-Fi 雷达系统Figure5 Wi-Fi radar system
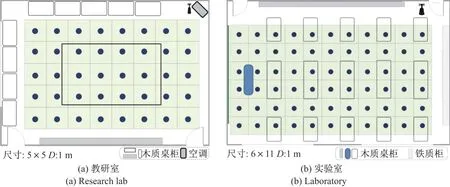
图6 定位场景平面图Figure6 Localization scenario layouts
为进行矩阵完备的效果对比,离线阶段执行全采样点指纹采集,方案见表1.采集过程为静态时,室内无移动目标;采集过程为动态时,室内3 人正常活动.在线阶段无其它移动目标,图5中的可移动RA 作为LRT 执行指纹采集.

表1 指纹采集方案Table1 Fingerprints acquisition scheme
5.2 指纹库构建方案评测
为评测MC 建库方案的有效性及精度,本文首先对完整采集的实测指纹库矩阵按50%、60%、70%和80%采样,以生成对应的待补全矩阵.由于LFM 规模较小且离线阶段对实时无过高要求,因此重构采用精度较高的SDP-based 算法[16],并借助CVXPY[20]求解.常用的相对重构误差(relative reconstruction error,RRE)和总体重构误差(total reconstruction error,TRE)被作为评价标尺,算式如下:

式中,X、M分别为实测和重构矩阵.不同比例测量值下的重构结果见图7.
生成待补全矩阵时考虑测量值边界参数:5×8时α= 0.4,6×11 对应α= 0.3[16].从整体上讲,图7反映出基于MC 的方案可以实现高效、精准构建指纹库的目的,在仅60%采集工作量下,静态环境时约95%的RRE 低于0.02,如图7(a)和(c)所示;较差的1 TA 动态环境时,低于0.02 的占比也达到了85%,如图7(b)所示;其次,通过图7可知,重构精度与测量值成正比,这与大部分基于MC 的实际应用情况相一致;最后,根据3.2 节,CSI 的能-距关系越稳定LFM 低秩性越强.因此,在指纹定位系统中,重构精度也受制于CSI 的波动性,具体表现在:1)同一场景下,即图7(a)、(b)和(d),室内人员的随机行为会产生更多干扰,因此静态环境重构精度高于动态;在多TA 下,动态环境造成的不稳定在CSI 平均策略下可得到弱化,故较于(b),(d)的重构更为精准.2)场景规模越大、环境越复杂,重构精度越不易得到保证,原因仍源自多径、反射及衍射等对CSI 的干扰,而弱化干扰的措施除了多天线、多Packets外,增多可利用的子载波数量也是重要途径之一[5].此外,为直观表现重构效果,本文单独对60%测量值的LFMs626执行了逐值比较,见图8.
最后,本文对场景下基于MC 的方案进行了横向评测.对比的算法为常用的空间插值法:Kriging 法和反距离加权法(inverse distance weighted,IDW)[18],选取的目标矩阵为LFMs410、LFMd401和LFMs616,评价标尺为TRE,结果见图9.
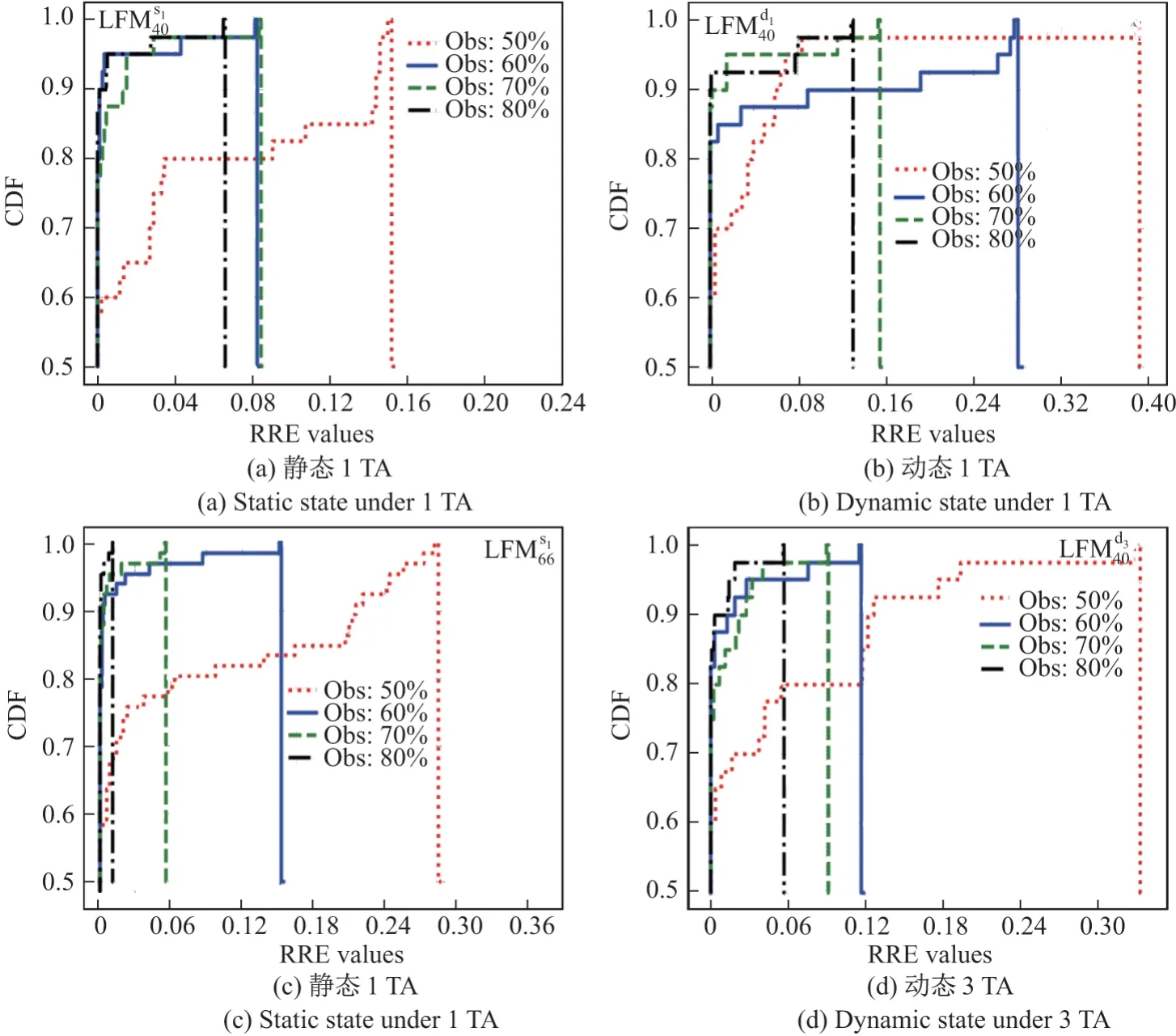
图7 不同条件下RRE 的累积分布函数Figure7 Cumulative distribution function (CDF) of RRE under different conditions
由图9可知:1)针对静态场景,在70%测量值下,当LFM 较小(LFMs140)时,3 种方法效果相当;LFM 较大(LFMs166)时,MC 精度高于IDW 且与Kriging 相当;针对动态指纹库的补全,MC 精度最优.2)观察值占比仍然是决定重构精度的重要因素,在较大静态场景,3 种方法对指纹库的恢复精度均随测量值的增加而提高.分析原因在于:IDW 算法结构简单,依靠局部估算值与测量值之间距离权重的平均进行重构,但抗噪声能力弱,拟合效果不佳;Kriging根据测量值的分布与相关度,进行差异化权重分配,且加入了误差预判机制,提高了估计准确度.但是其未考虑全局信息,选取的变差函数无法保证参数最优,从而使重构精度遇到瓶颈;基于MC 的算法依靠大量的迭代实现信息的通盘考量,取得了最好的效果,但相较插值法其时间开销较大.鉴于指纹库的重构是离线操作,因而在性能的取舍上,本文推荐精度的优先权应大于时间开销.
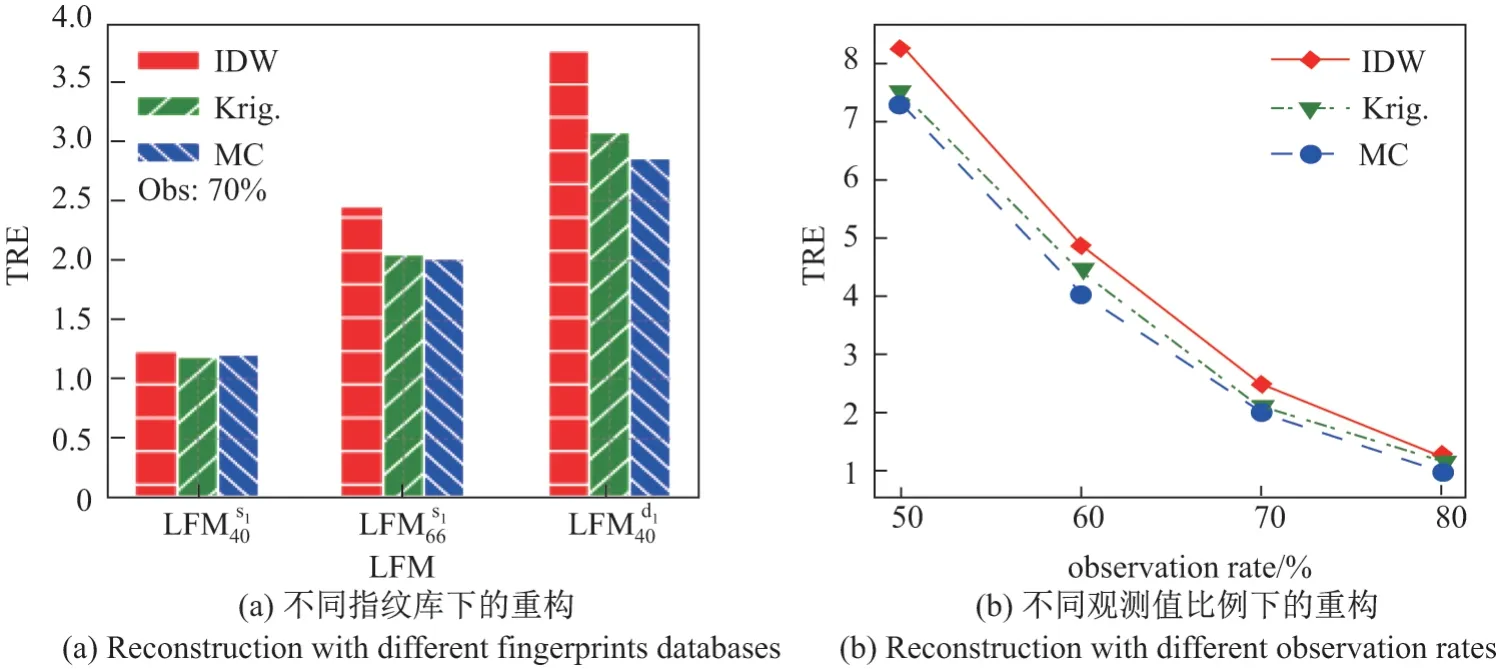
图9 不同重构方法对比Figure9 Comparison of different LFM reconstruction methods
5.3 定位性能评测
基于实测指纹库和重构库,以及所提的在线指纹匹配方法,本环节评测了系统的定位性能.鉴于FIFS[10]充分考虑了CSI 的频、空分集特性,指纹生成与匹配策略与本文相似,且取得了较优结果,因而选取它作为对比目标.评测方案见表2,各指纹库下的方案均完整执行4轮次,用于比对的数据源相同.结果见图10.
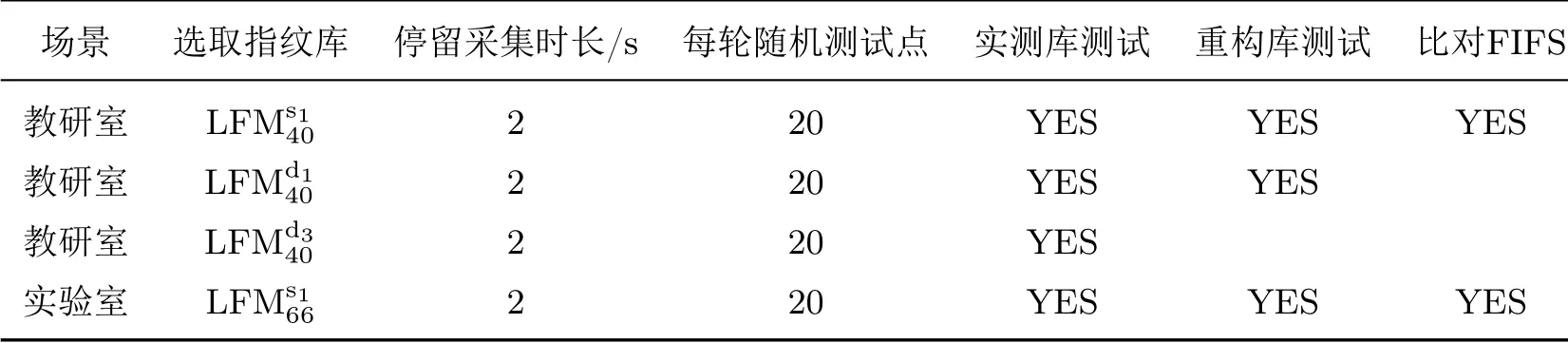
表2 定位评测方案Table2 Localization evaluation scheme
图10展示了可移动LRT 基于实测库的定位结果.在图10(a)中,相同颜色的数据点代表同一指纹库下的执行结果,不同的轮次用不同形状表征;图10(b)反映了所提系统的定位性能,其无误匹配均超过70%,最优的LFMs140下的比例超过了76%.静态实测库下1 m 内误差占比超过了80%,其中小场景下达到了85%;动态库下的表现相对较差,如图10(a)所示,稳定性较差,但在多TA 模式下,定位性能得到了改善,原因与5.2 节分析相同.需要注意的是,多TA 模式丢包率较高,经本文的现场测试,如果延长停留采集时间或优化采集手段,定位的性能会进一步得到提升.
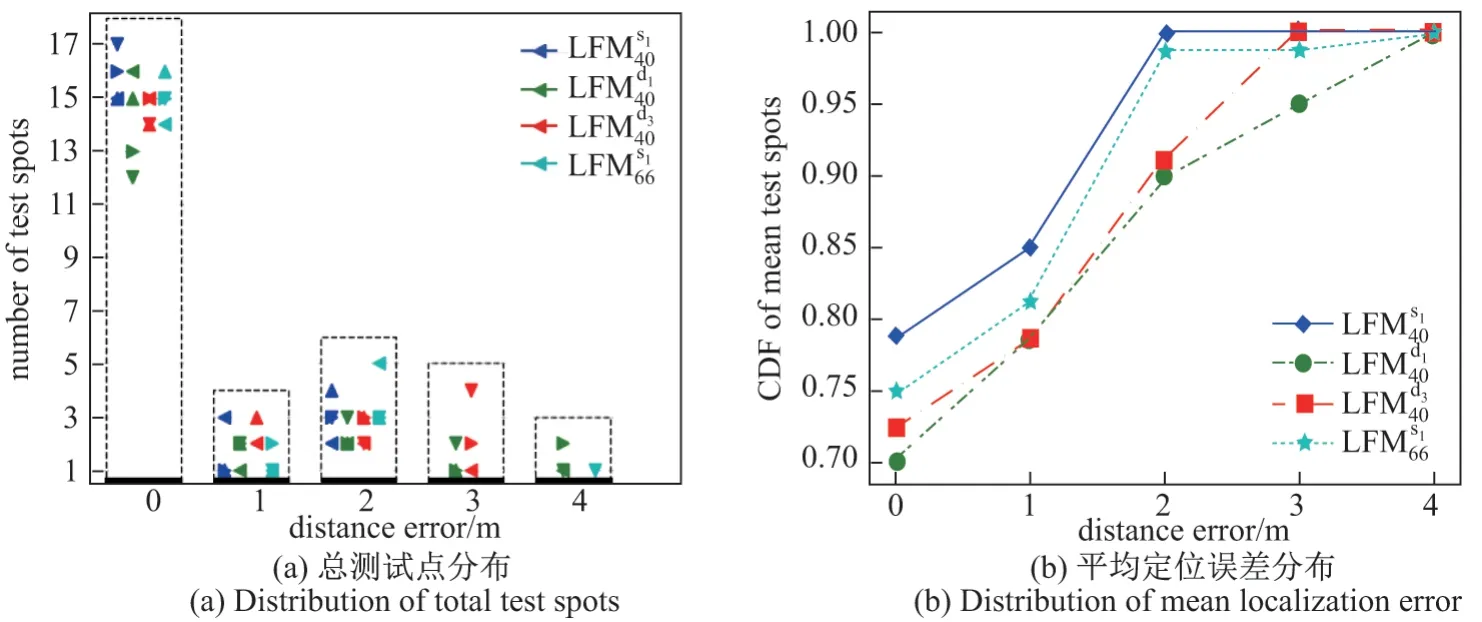
图10 不同实测指纹库下的定位误差Figure10 Localization errors with different actual fingerprints databases
基于上述采集的数据,我们按照表2在重构库下进行了综合定位评测,并选取两种静态库与FIFS 进行了比对.对于得到的4 轮次、每轮次20 个测试点的结果,采用平均定位误差作为评价标尺,结果见图11.
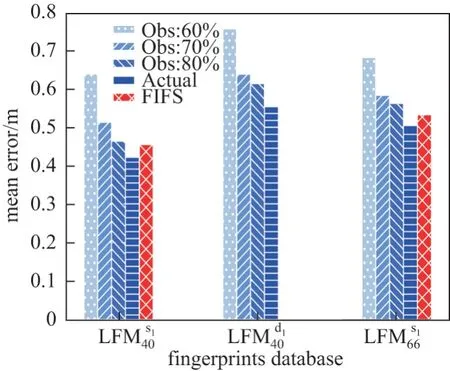
图11 平均定位误差对比Figure11 Comparisons of mean localization error
从图11可以看出,重构库下的定位性能同样正比于测量值.对于静态库下的两种场景,在60%测量值占比得到的重构库下,定位的平均误差最大,而70%占比与80%占比性能相当;70%重构库所取得的结果与实测库相比,误差均小于0.1 m.动态库下的定位误差高于同场景下的静态库,原因与位置指纹的不稳定有关.考虑到不同场景下LBS 的差异化需求,具体实施定位方案时,可以在效率与精度之间寻求一个折衷.如在本文的场景下,构建指纹库时可选择70%的测量值占比.
对于所提方案与FIFS 定位性能的比较,在图11两种静态场景下,所提系统基于实际库的误差均小于FIFS 方法;在80%占比的重构库下,系统的性能与FIFS 相当.所提系统占优的主要原因在于:1)设计了更稳定的位置指纹;2)更充分地利用了CSI 的频率和空间分集.此外,需要指出的是,场景的增大会减小两种方法的差距.
根据文献[7]所得的结论,指纹技术精度对采样点的尺寸有较高相关度.因此,为评估采样点缩小(精度分辨率提高)对所提方案的影响,本文对教研室场景进行了定位区域再划分,将采样点间隔D缩小为0.6 m,相应的指纹库规模扩大为8×12,并在静态场景下依靠742 N和841 N 得到两种实测库:LFMs196和LFMs296.随后进行了基于重构库的性能评测,其中重构环节设置测量值占比为70%.评测进行4 轮次、每轮次30 个随机测试点.由于采样点间隔较小,评测以估算LRT 所处位置的平均正确率分布为标准,结果见图12.
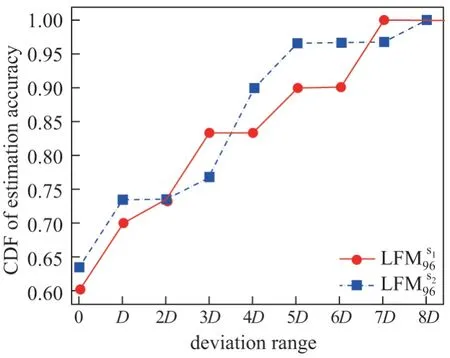
图12 位置估算的正确率分布Figure12 CDF of location estimation accuracy
图12中,横轴表示LRT 估计值与真实位置的偏差,如“2D”代表估计位置偏离实际位置2 个采样点(约1.2 m).以图10(b)为对比,可以看出缩小采样点尺度反而会增大定位的偏差,如无误差的比例由约75%降为60%.其原因为:密集的采样会造成近邻CSI 指纹之间的区分度降低.尽管此举会给LFM 的重构带来误差减小,然而在匹配阶段,由于矩阵元素间有更强的相似度,造成所采用的基于概率匹配的估算方法性能降低.对于指纹技术,虽然缩小采样点的尺度是提供更精准LBS 的一个途径,但是根据本文的评测结果,如果不仔细设计匹配算法,反而会使定位性能有所下降.如保持匹配算法复杂度不变,则避免性能下降的手段可选择:1)利用多天线来稳定CSI 的波动.如图12中,双天线矩阵LFMs296具有较优的结果;2)利用数量更多的子载波[5].
6 结 语
本文借助IEEE 802.11n 标准下包含多个子载波频域特性的CSI,设计了一种基于细粒度位置指纹的定位系统.首先,系统充分利用CSI 的空间和频率分集优势,通过小波动指纹设计和MC 理论,提出了一种稳定、高效的指纹库构建方案;其次,利用贝叶斯准则概率模型,实现了定位阶段的指纹匹配;最后,在两个真实场景下多角度评测了系统的性能,各类的实验数据支撑了本文的理论预判,展示了所提系统的高效性和精准性.然而,所提系统未对多AP 和更多CSI 载波场景进行评测,且更精细的指纹匹配算法如深度学习也未涉及,这将在进一步的研究中开展.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
家庭影院技术(2021年2期)2021-03-29
家庭影院技术(2021年1期)2021-03-19
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
雷达学报(2018年5期)2018-12-05
中国自行车(2018年11期)2018-12-03
中国自行车(2017年1期)2017-04-16
现代工业经济和信息化(2016年8期)2016-05-17
自动化学报(2016年8期)2016-04-16
