基于PLSA和BoW的高分遥感影像小型港口检测
2019-06-22 08:32:28张济勇
应用科学学报 2019年3期
毕 奇,童 心,张济勇,许 凯, 张 涵, 秦 昆
1.武汉大学遥感信息工程学院,武汉430079
2.北京洛斯达数字遥感技术有限公司中南分公司,武汉430070
3.国网经济技术研究院有限公司,北京102209
4.中国地质大学(武汉)信息工程学院,武汉430070
遥感技术在环境监测、应急响应和重要场所监管等诸多领域应用广泛.其中,对港口等主要运输场所的监管关系到港口利用、经济发展和国家安全[1-3].相比于大型港口,对漫长水岸线上分布的众多小型港口的管理往往受到人力限制,很难实现有效监管.另外,港口环境复杂、港口特征难以描述,港口目标的自动检测至今仍是难点[4].
常见的大中型港口检测方法包括形态学[5]、基于边缘线特征[6]和基于纹理特征等方法[7].数据日益丰富的高分辨率遥感影像为小型港口监测提供了有效的数据源.目前利用高分影像进行港口检测的方法主要包括视觉注意机制、概率潜在语义分析模型(probabilistic latent semantic analysis,PLSA)和词袋模型(bag of words,BoW).其中,视觉注意机制可将底层特征抽象为高级知识,提高港口的检测精度,但对特征的隐含信息挖掘不够充分,模型适应性不足[8-9];PLSA 和BoW 模型则可充分挖掘隐含信息,横跨语义鸿沟.针对PLSA 对视觉单词的空间分布考虑不足这一问题,文献[10]使用不变量特征描述目标,利用PLSA 模型提取隐含语义信息作为特征输入,使用SVM 分类器获取分类模型,从而提高了港口检测的精度.文献[11]构建了一种基于多尺度不变特征的BoW 模型用于遥感影像港口分类,但港口识别中的视觉词汇多义性问题仍未得到有效解决.
本文研究了一种基于PLSA 和BoW 的高分遥感影像小型港口检测方法.首先提取归一化差分水体指数(normalized differential water index,NDWI)和分形维数特征,基于GrabCut分割方法得到水岸线,缩小搜索范围;然后将灰度直方图统计、NDWI、分形维数纹理特征引入PLSA 模型生成特征描述集,同时将加速鲁棒特征(speeded up robust features,SURF)引入BoW 模型生成视觉词典;进而根据以上特征描述集,基于小型港口样本库训练SVM分类器;最后在待检测影像上实现高分影像小型港口的高精度检测.
1 基本原理
1.1 小型港口特征描述
小型港口常沿江沿湖分布,相比于大中型港口,面积小、几何形状不规则,常缺少防波堤和仓库等设施.文献[12]指出,小型港口所具有的稳定特征是其轮廓特征点比非港口区域密集.因此高分遥感影像上小型港口的主要特征包括:1)位于水陆交界处,水岸线是其存在的前提.受水岸本身和港口建筑物、船舶等影响,水岸线一带往往形状不规则且纹理信息丰富.2)包括水体和陆地背景.影像中往往水域灰度较低、陆地灰度较高.3)由船舶、建筑物等目标组成,目标间的空间信息丰富.4)少见防波堤等大型港口设施.
针对这些特点,本文选用分形维数、归一化差分水体指数NDWI、灰度直方图和SURF点特征来描述小型港口.
1)分形维数
该特征旨在定量描述不规则集合目标的形状复杂度.考虑到港口几何形态复杂,水岸线和陆地部分纹理信息丰富,水域部分纹理信息匮乏,该特征可有效描述港口纹理信息复杂的水岸线.本文选用图像处理领域常用的盒子维数计算方法[13].
2)NDWI
NDWI 是描述水体最常见方法[14],定义为

式中,pGreen和pNIR分别为绿光波段和近红外波段的光谱反射率.
由于陆地区域(包括房屋群和植被群等)NDWI 值较低,因此NDWI 在描述港口水体部分的同时,可有效突出港口区域的光谱特征.
3)灰度直方图
影像灰度直方图描述像素灰度值在各灰度级的分布,一般将影像灰度级由小到大展开,并依次统计像素灰度在各个灰度级上出现的频率,其计算公式为

式中,rk表示灰度值为k的所有像素,N为像素总数,nk是灰度值为k的像素数.
港口位于水陆交界处,影像具有水域灰度较低、陆地灰度较高的特点.灰度直方图可有效描述港口区域的光谱特征.
4)SURF 点特征
SURF 算子是对SIFT 算子的改进[15],增强了对光照变化以及噪声干扰的鲁棒性.该算子生成步骤主要包括:
步骤1利用Hessian 构造影像金字塔;
步骤2非极值点抑制初步确定特征点;
步骤3极值点精确定位;
步骤4兴趣点主方向确定;
步骤5SURF 特征描述.
使用SURF 特征点加上简单的聚类操作,很容易在BoW 模型下描述港口中船舶、建筑物等目标,估计港口中丰富的上下文信息.
1.2 PLSA 与BoW 模型原理
1.2.1 PLSA 原理
PLSA 的核心思想是对目标描述特征出现次数进行统计,降低描述向量维数,提取隐含主题信息.其理论基础牢固,鲁棒性较强,应用广泛.
假定得到一组特征集F={f1,f2,··· ,fM},描述的目标O={o1,o2,··· ,oN},并由此组成N ×M的特征频率矩阵N=(n(oi,fj))ij,n(oi,fj)表示特征fj在目标oi中出现的频率.每一对(oi,fj)与一组潜在成分主题Z={z1,z2,··· ,zK}相对应,K为任意给定的常数.PLSA 的本质就是描述目标与隐含信息之间的联合概率函数P(oi,fj,zk).文献[16]给出了相应的理论与推导.
1.2.2 BoW 原理
BoW 最早应用于文本分类,其基本思想是通过统计文本中关键词w1,w2,··· ,wn的频率直方图来构建文本描述集D.具体原理和公式推导见文献[10].
由于原理简单且处理效率高,BoW 模型得到广泛应用.图像关键词提取与文本关键词的一个主要差异是其通常在提取点特征后聚类生成图像词汇.其中聚类方法尤以K 均值聚类算法使用广泛,具体步骤如下:
习近平总书记指出:“青年兴则国家兴,青年强则国家强。青年一代有理想、有本领、有担当,国家就有前途,民族就有希望。”
步骤1随机选取k个初始中心;
步骤2确定每个特征点与聚类中心的距离,并将该特征点归并于与其距离最近的聚类中心;
步骤3对完成聚类操作的数据重新生成聚类中心;
步骤4重复步骤2 和3,直到结果收敛为止.
该算法可有效将高相似度的词汇降维,构建较完善的视觉词典.统计出各个单词在词典中出现的频率并构建统计直方图向量后,使用合适的分类器即可识别.
2 检测方法
本文将PLSA 和BoW 模型相结合对小型港口目标进行检测,流程如图1所示,包括预处理、特征提取、生成PLSA 和BoW 模型、训练分类器等步骤.
2.1 预处理
将水岸线提取作为预处理环节,能有效缩小港口检测范围,提高检测效率.本文水岸线提取基于分形维数特征和NDWI,包括超像素分割、统计超像素特征、设置水域模板、GrabCut分割方法提取水域范围和形态学后处理共5 个步骤.图2给出了一个水岸线提取的实例.
2.1.1 超像素分割
SLIC 超像素分割算法由Achanta 等提出[17].该算法首先将RGB 颜色模型的影像转换到CIELAB 空间,然后利用迭代聚类获取分割后的图像集合.该算法处理速度快,对目标的边界保持效果较好,能生成特征相似、大小近似均匀的超像素集合,且使用时只需设置超像素大小即可.经预实验,超像素大小取30 时可得最佳分割结果,图2(a)子图即为一组实例.
2.1.2 统计超像素特征
将超像素作为影像的最小基元,计算其分形维数纹理特征和NDWI特征.在横坐标为NDWI值、纵坐标为分形维数特征值的特征空间中,水域特征往往集中在右下角;非水域特征则较分散,仅有少量与水域相重合.图2(b)是一个示例.其中红色五角星表示属于水域的超像素,绿色五角星表示非水域超像素.
2.1.3 设置水域模板
统计超像素的分形维数纹理(fractal dimension texture,FDT)特征和NDWI 特征后,根据统计结果并按照如下规则集将影像中超像素划分为4 种可能的区域类型.

图1 基于PLSA 和BoW 的港口检测流程图Figure1 Flowchart of harbor detection based on PLSA and BoW
1)若NDWI 特征值小于0.4 或FDT 特征值大于3.5,则可能为陆地;
2)若NDWI 特征值小于0.3 或FDT 特征值大于4.4,则一定为陆地;
3)若NDWI 特征值大于0.42 且小于0.58 或FDT 特征值大于1.6 且小于2.6,则为水域;
4)其他情况均可能为水域。
根据上述特征值的4 种可能性,基于NDWI 和分形维数特征可确定对应区域.图2(c)是该示例区域的水域模板图.
2.1.4 图像分割
GrabCut 方法能够通过较少交互甚至零交互,将前景目标从复杂的背景层中提取出来.该方法分割效果理想,被广泛使用[18].图2(d)是基于以上特征使用GrabCut 图像分割算法提取的水域结果示例,白色区域检测为水域.
2.1.5 形态学后处理
对上一步的水域检测结果进行数学形态学膨胀操作,然后使用canny 算子提取边缘,得到港口检测候选区.图2(e)的示例中结构元素大小为300×300,边缘由红线标出.
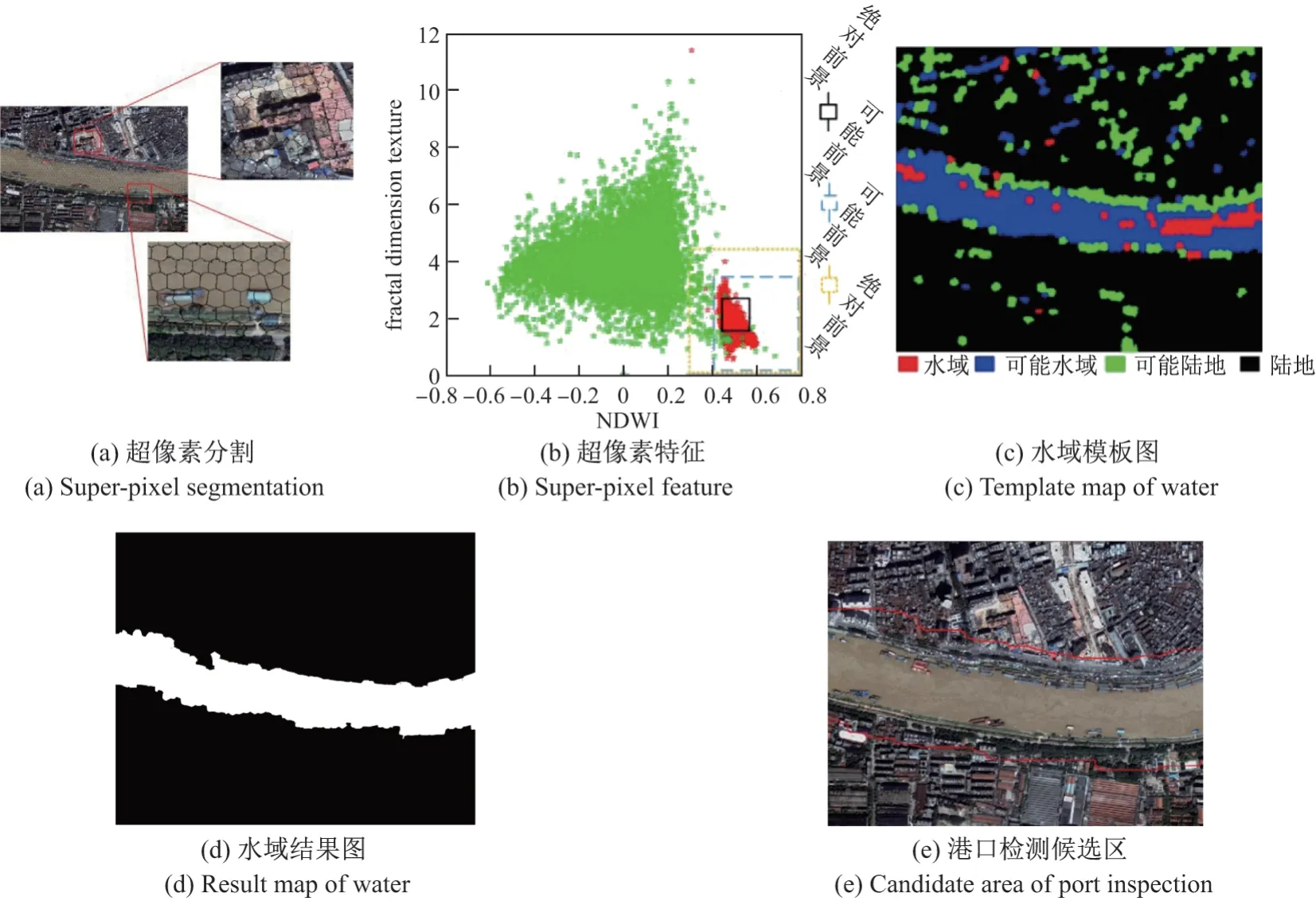
图2 水岸线提取示例Figure2 Example of coastline extraction
2.2 特征提取
相比于建筑物、植被、水体等常见地物,港口位于水陆交界处,包含船舶建筑物等目标,纹理信息丰富.选择合适的特征对港口识别精度至关重要.
选取灰度统计直方图、分形维数、NDWI 3 种特征的统计直方图描述样本.为方便特征直方图统计并使得灰度特征、纹理特征的变化趋势保持一致,将分形维数特征线性拉伸至0~255,将NDWI 线性拉伸至0~255 并取反.由此得到的正样本的特征直方图具有明显的双波峰特征.由于特征维数高,可使用PLSA对特征直方图有效降维,挖掘隐含信息.
为描述港口丰富的上下文信息,选用基于SURF 描述子的BoW 模型.相比于常用的SIFT 描述子,该算子采用卷积方式提取特征,不需要构建DOG 尺度空间.在保持SIFT 算子缩放和旋转不变等优势的同时,SURF 算子具有仿射不变和运算性能高等优点,可有效保证港口目标特征的可区分性,抵抗光照和传感器视角等多种外界因素干扰.
2.3 基于PLSA 和BoW 生成特征模型
2.3.1 PLSA 模型生成
将遥感影像的灰度直方图、分形维数和NDWI 特征作为特征集F={f1,f2,··· ,fM};影像数量相当于描述的目标集O={o1,o2,··· ,oN},其中N为影像数.每一对可视数据(oi,fj)与一组潜在成分主题Z={z1,z2,··· ,zK}相关,本文设定常数K=20,即以上高维特征通过PLSA 模型降维变为20 个主题.
采用随机法对P(fj|zk)和P(zk|oi)进行初始化.随后使用EM 算法至迭代收敛,此时所提取的目标参数即为所需的隐含信息主题.由此得到的特征向量可作为SVM 分类器的特征输入值.
2.3.2 BoW 模型生成
关键点提取是一种有效的影像特征提取方法.本文选择SURF 特征向量来描述港口目标.引入BoW 模型后,影像相当于BoW 模型中的“文本”,SURF 特征向量相当于“单词”.利用K均值进行单词聚类,并构建视觉词典.
对于待处理的影像,同样进行SURF 特征提取,并将其与视觉词典进行特征匹配,从视觉词典中判别出与该特征最相似的单词并统计其出现的频率,用该频率统计直方图作为描述子.
将以上两种模型的特征描述集一起作为输入,训练SVM 分类器.
2.4 训练SVM 分类器
为训练分类器,首先需要建立小型港口样本库.正样本即小型港口目标,负样本包括水体、建筑物、道路等常见的非港口目标.样本质量的好坏直接影响模型的泛化能力.一般来说,用于训练的正负样本比例应在1:2 至1:3 之间.
使用SVM 分类器旨在将目标与背景进行分离,其中核函数的选择至关重要.核函数将低维空间中线性不可分的问题转化到线性可分的高维空间中,通过更复杂的分类模型将目标从背景中提取出来.常见的核函数包括线性核函数、多项式核函数、径向基函数等.本文选择径向基函数作为核函数.
分类器的使用分为训练过程和测试过程.使用经过PLSA 和BoW 生成的特征描述集对所有训练样本进行训练;使用同样的描述集对测试样本进行测试.通过交叉验证获取分类模型的最优参数.最后将待检测影像以同样方式进行描述集提取,基于分类模型可以得到港口检测结果.
3 实 验
3.1 实验数据
本文基于融合后的快鸟影像沿长江分布的小型港口构建样本库.该样本库包括500 个正样本(图3)和1 000 个负样本(图4).正样本为小型港口目标,负样本包括建筑物、植被、道路、裸地等.
根据训练的SVM 分类器,重点对湖北境内的长江沿线港口开展检测实验.另收集22 幅空间分辨率为0.6 m、大小为2 000×2 000 像素的快鸟遥感影像并开展实验分析,以验证本文方法的有效性.以上影像不与样本库中任何样本所在位置重复.选用查准率、查全率、错误率和耗时4 个评价指标考察识别精度和算法效率.其中,查准率(precision rate,PR)、查全率(recall rate,RR)和错误率(error rate,ER)计算公式分别为

式中,TC为正确识别的港口数,FA为识别为港口的总数.TA为真港口影像数.TF为港口误判定为非港口的数目,FT为非港口误判定为港口的数目,NA为总港口数.
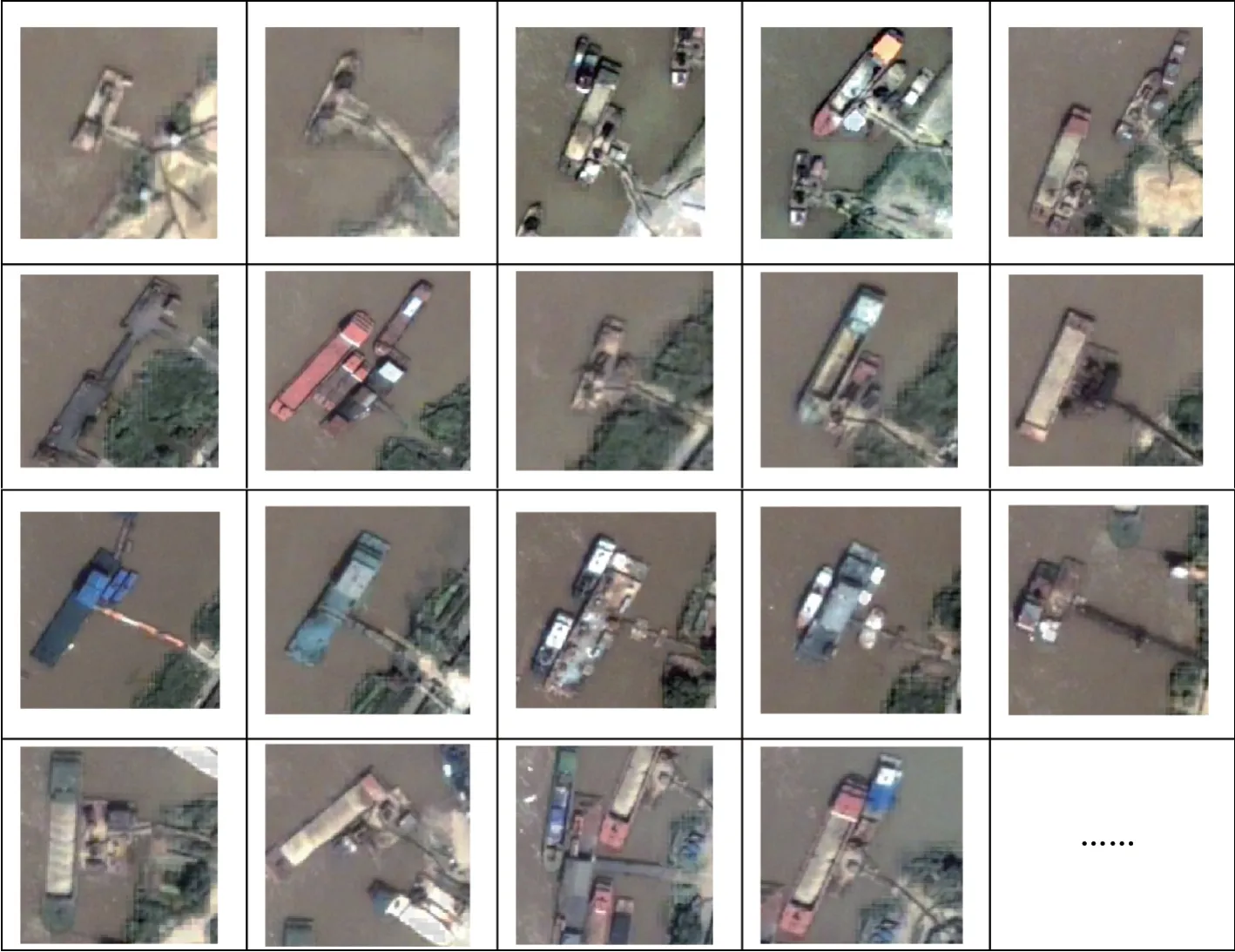
图3 港口识别正样本(500 个)Figure3 Positive samples for harbor detection (500)

图4 港口识别负样本(1 000 个)Figure4 Negative samples for harbor detection (1 000)
3.2 结果与分析
本文利用构建的样本库进行SVM 分类器的训练和测试,采用交叉验证的方式得到最优参数,即惩罚系数c取80,核函数中γ值取4.4.基于以上分类器参数,对这22 幅影像进行港口检测实验.所有实验均先进行水岸线提取,缩小检测范围提高检测效率.本文以红色矩形框的形式标出港口目标,若出现相邻边界,则对矩形框进行合并处理.
为验证本文所选特征(SURF+BoW+gray+texture+NDWI+PLSA)的有效性,在使用PLSA 前提下,设置灰度直方图(gray+PLSA)、分形维数(texture+PLSA)、归一化差分水体指数(NDWI+PLSA)和三者结合(gray+texture+ NDWI+PLSA)这4 组特征描述对比实验;为说明PLSA 模型在港口目标识别中的作用,开展对以上3 种特征直接输入SVM 训练(gray+texture+NDWI)和使用PLSA 降维后再输入SVM 训练(gray+texture+NDWI+PLSA)的对比实验;为证明BoW 和PLSA 模型结合进行港口目标检测的优势,开展基于SURF 特征的BoW 模型(SURF+BoW)、基于以上3 种特征的PLSA 模型(gray+texture+NDWI+PLSA)和对以上两种特征描述集进行合并处理(gray+texture+NDWI+PLSA+SURF+BoW)的对比实验.
表1为其中3 幅实验结果.影像黑色区域为水岸线提取算法判定的非检测区域.
由以上结果可知:
1)本文研究的PLSA 与BoW 相结合的方法识别准确率较高,效果显著.
2)本文水岸线提取这一预处理环节在保证小型港口目标不被误剔除的前提下,缩小了检测范围,可有效提高检测效率和检测精度.
3)常见的单一特征难以对小型港口进行全面准确的描述,错检、漏检现象明显.例如,SURF+BoW 算法易将船只以及水岸线周围的非港口区域误判为港口(表1第4 行).
4)相比于单特征,多特征与PLSA 结合进行检测时准确率提高显著(表1第9 行).PLSA模型可在挖掘隐含的主题信息且正样本不全面的情况下,仍然能够达到较好的港口目标识别效果.
22 幅影像的平均精度评价结果如表2所示.分析可知:
1)本文方法查准率达82%,错误率仅为8.6%,为以上方法中最佳;查全率为91.1%,与最佳查全率相当.该方法通过结合灰度直方图、分形维数和NDWI 特征,并使用PLSA 模型挖掘的上述特征的隐含主题信息,避免了样本不足导致的查全率偏低等问题;同时通过结合SURF+BoW 算法考虑了目标的SURF 点特征信息,有效提高了检测精度,且耗时较少.
2)在单特征方面,所有方法查准率均低于60%,查全率最高仅达81%.此外,单独使用分形维数特征的方法耗时最长,因为单独使用纹理特征结合PLSA模型进行迭代优化时,容易出现难以收敛的情况.
3)在多特征方面,将光谱、灰度和纹理特征直接输入分类器的方法查准率较高,但查全率低.在此基础上结合PLSA 模型,可将查全率和查准率提高至80%.
4 结 论
小型港口检测目前研究较少,但具有重要的研究意义.本文研究了一种基于PLSA 和BoW 的高分辨率遥感影像小型港口检测方法,其特征描述集可有效描述小型港口.此外,预先进行的水岸线提取可有效缩小检测范围,提高检测精度.相比于常见的单一特征和只使用PLSA 或BoW 生成特征描述集,本文方法可在耗时较少的前提下,大幅提高小型港口的检测精度,具有较好的应用前景.

表1 不同分类模型的港口检测对比实验结果Table1 Comparison experiment results of harbor detection under different classification models

表2 精度评定Table2 Accuracy evaluation
结合有关实验和讨论,未来的研究可从以下3 方面开展:
1)使用PLSA 和BoW 模型需人工设置的参数较多,可研究一种自适应参数取值方法,以增强本文方法的通用性.
2)分形维数等特征复杂度高,利用PLSA 模型进行隐含主题信息提取时计算量大,耗时长.后期可研究复杂度较小的隐含主题信息提取算法.
3)使用SURF 算子容易导致建筑物与港口混淆,可研究更佳的描述子来生成BoW 模型.
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
数学物理学报(2022年4期)2022-08-22 04:06:44
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
数学物理学报(2020年3期)2020-07-27 01:19:56
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
电子测试(2018年1期)2018-04-18 11:52:35
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
数学物理学报(2016年5期)2016-08-24 07:38:40
数学物理学报(2016年6期)2016-04-16 04:40:58