单人三向连续步行荷载相关性及建模研究
2019-06-21 07:24:48赵丁苏
振动与冲击 2019年11期
赵丁苏, 陈 隽,2
(1. 同济大学 土木工程学院, 上海 200092; 2. 同济大学 土木工程防灾国家重点实验室, 上海 200092)
随着经济的发展和社会生活水平的日益提升,人们对土木工程结构使用性能的要求越来越高。大跨度轻柔结构如人行桥、大跨楼盖、人行连廊等常呈现出自振频率低,结构阻尼小的特点,在步行、跳跃等人致荷载作用下容易产生较大的振动,影响结构的使用性能。这类结构的人致振动舒适度问题越来越多地受到研究者和工程界的关注[1]。
建立合理的人致荷载模型是研究人致结构振动舒适度问题的前提。对于最常见的行人步行荷载,Blanchard等[2-8]在不同时期研究了步行荷载的特性并提出了各自的荷载模型。足底平面内,步行荷载具有竖直、前进和左右三个方向上的分量。由于实验条件的限制,现有研究对象或为单向连续荷载,或为三向的单步荷载,缺少针对三向连续步行荷载的实验,从而也缺乏对荷载三分量间相关性的认识。在人致结构振动分析中,对于是否需要考虑步行荷载三向分量间的相关性,并没有清晰的认识和可靠的依据。此外,已有荷载模型大都以步频为基本参数,缺少针对其他步态特征如步速的荷载模型,而步速与人群的密度直接关联。因此,有必要通过实验资料研究三向连续步行荷载的相关性并建立多参数的荷载模型。
为此,本文首先收集了大量的行人三向连续步行荷载实验记录,对三向分量间的相关特性进行了统计分析。在此基础上,建立了各方向步行荷载分量的傅里叶级数模型,并由实验记录确定了模型参数及其随步频和步速变化的规律。最后与已有各单向荷载模型进行了对比。
1 单人三向连续步行荷载实验
通过实验获得大量步行荷载时程数据并分析其特性,是步行荷载建模的重要步骤和前提。实验方案和实验装置的选择决定了数据记录的可靠性以及后续荷载模型的合理性[9]。
1.1 单人三向连续步行荷载实验
单人三向连续步行荷载实验,由本研究项目的英国合作方在谢菲尔德大学土木工程实验室利用测力跑步机完成。与传统的测力板仅能记录单向(或三向)的单步荷载相比,测力跑步机的优势在于不需要很大的实验空间,可同步记录三向且连续的步行荷载时程数据,并且可以方便地调整以实现各种步行速度[10]。测力跑步机的运动平面近似刚性,避免了人-结相互作用的影响。
实验共有85名测试者参加(包括57名男性和28名女性),均为健康的成年人。测试者的年龄范围为29.8±9.1岁,体重范围为75.8±15.2 kg,身高范围为174.4±8.2 cm。实验前所有测试者均需签署知情同意书,实验时均着舒适合脚的平底鞋在测力跑步机上预演连续步行过程直至步态自然。起始的步行速度为2 km/h,间隔为0.5 km/h,各位测试者根据自身情况选择各自的最大步行速度,平均每位测试者完成10个不同步行速度的实验工况。实验共获得850条三向连续步行荷载时程数据,采样频率均为200 Hz。
与已有研究不同的是,本次实验控制参数为步行速度而非步行频率。步行频率是指单位时间内的步数,决定了步行荷载时程的各阶主频,是已有荷载模型中常用的参数。为与现有模型对照,通过实测数据分析发现步行频率的均值与步行速度间存在明确的关系,如图1所示,采用幂函数拟合可得
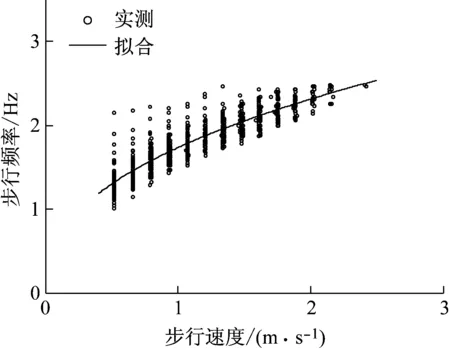
图1 步行频率与步行速度之间的关系
(1)
式中:fp为步行频率(Hz);v为步行速度(m/sec)。幂函数拟合满足边界条件v=0 m/s,fp=0 Hz。
图2所示为实测记录的步行频率频数分布直方图,分布范围是1~3 Hz,其中步行频率低于1.5 Hz和高于2.5 Hz的数据量较少,因此本文研究的步行频率范围为1.5~2.5 Hz。
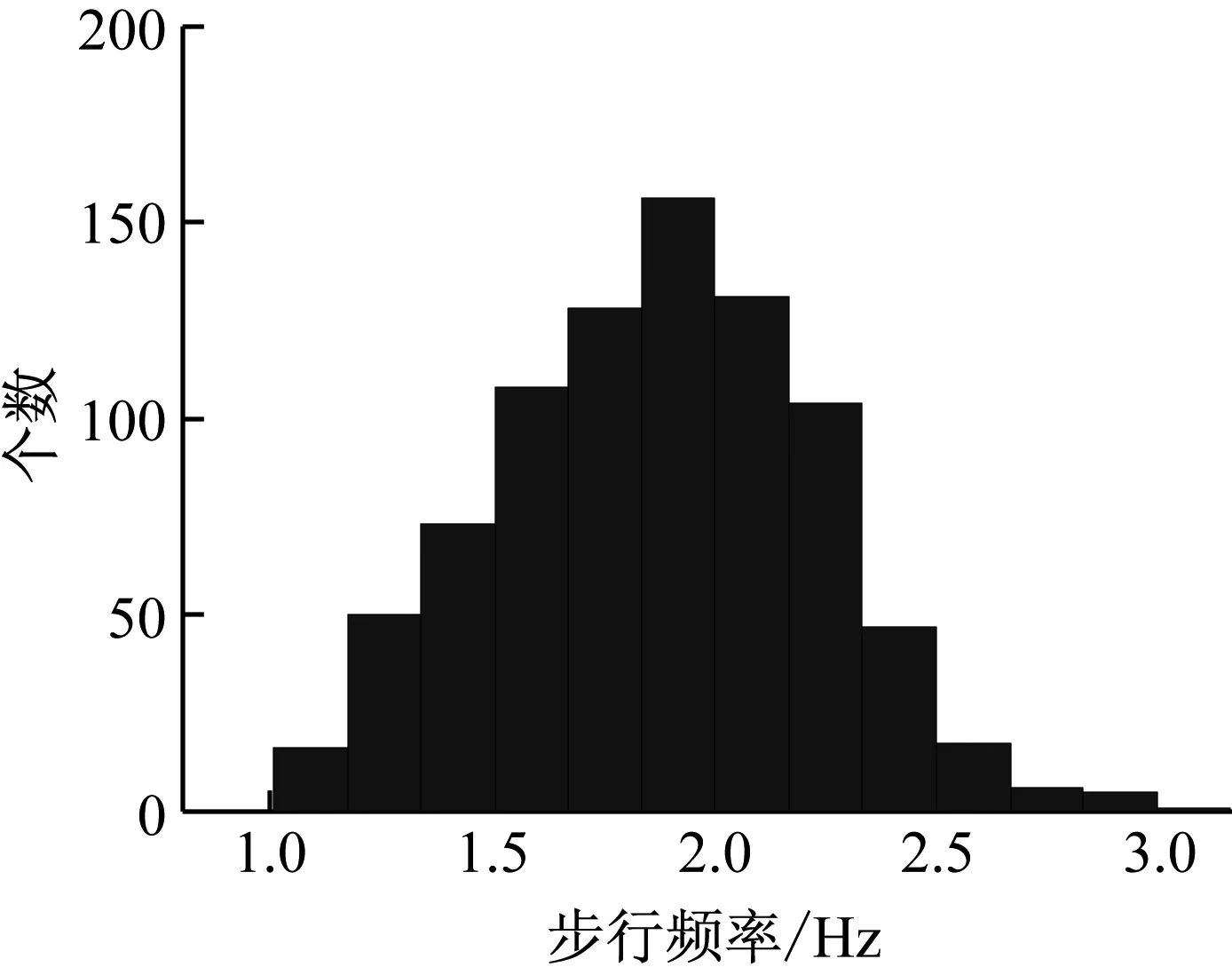
图2 步行频率频数分布直方图
1.2 三向连续步行荷载特性分析
(1) 时频特性
如图3所示,步行荷载包括左右侧向Fx、前进方向(也称纵向)Fy以及竖向Fz三个分量,三者满足右手坐标系法则。图4是某男性测试者(年龄:28岁;体重:83.3 kg;身高:175 cm)在步速为1.39 m/s时的步行荷载三个分量的时程曲线及其对应的傅里叶幅值谱,其中时程曲线已经体重归一化。对比可知,三个分量的时域波形特征差异明显;荷载幅值方面,竖向Fz最大,纵向Fy其次,侧向Fx最小。由时程曲线形状和傅里叶幅值谱峰值特点可知,行人连续步行的三个分量均可视作周期过程。

图3 步行荷载的三个分量
(2) 峰值因子
各方向上步行荷载峰值与人体重力的比值称为荷载峰值因子μk,计算表达式为
(2)
该因子反映了荷载的动力效应,对确定等效静力荷载有重要意义。本实验数据中侧向荷载峰值因子约为0.1~0.2,纵向约为0.1~0.4,竖向则约为1.2 ~1.7。图5反映了实测的三个方向的荷载峰值因子随步频增大而增大的情况,竖向荷载分量最为明显,通过线性拟合可得峰值因子和步频的关系如下


(a) 侧向步行荷载时程曲线及其傅里叶幅值谱
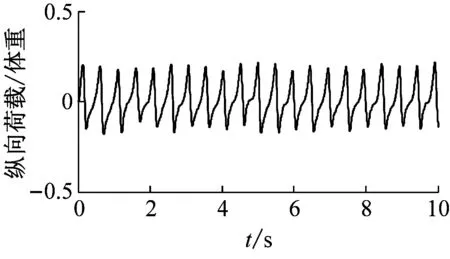
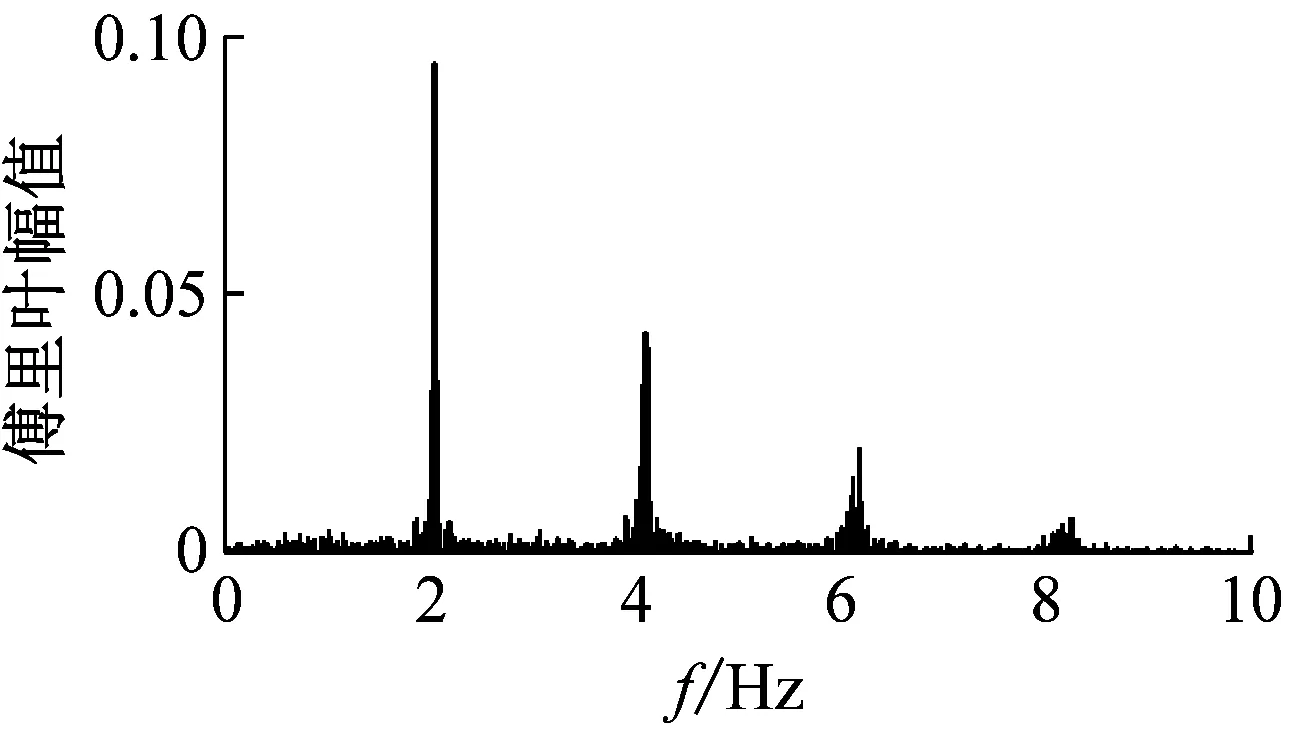
(b) 纵向步行荷载时程曲线及其傅里叶幅值谱

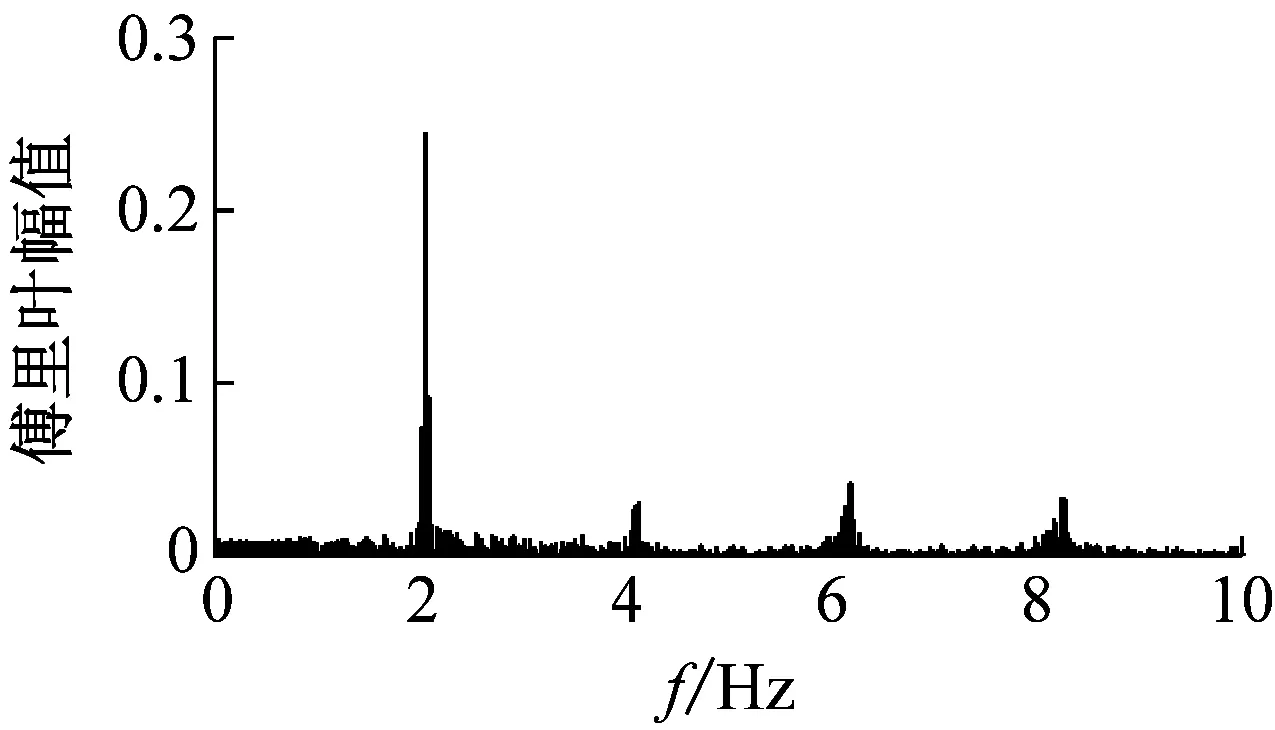
(c) 竖向步行荷载时程曲线及其傅里叶幅值谱
图4 步行荷载时程曲线及其傅里叶幅值谱
Fig.4 Time histories of walking load and its Fourier amplitude spectrum
μx=0.088 5fp-0.041 4=0.153 5v0.415 3-
0.041 4
(3)
μy=0.187 5fp-0.128 4=0.325 2v0.415 3-
0.128 4
(4)
μz=0.421 8fp+0.697 7=0.731 6v0.415 3+
0.697 7
(5)
式中:fp为步行频率(适用范围1.5~2.5 Hz)。上式同时给出了峰值因子随步速变化的关系,适用步速范围为0.7~2.41 m/s。
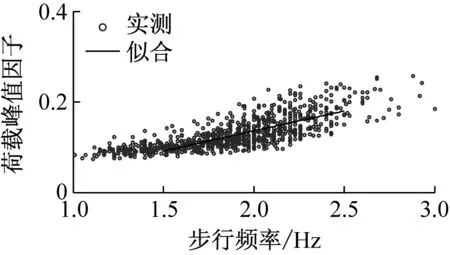
(a) 侧向步行荷载峰值因子
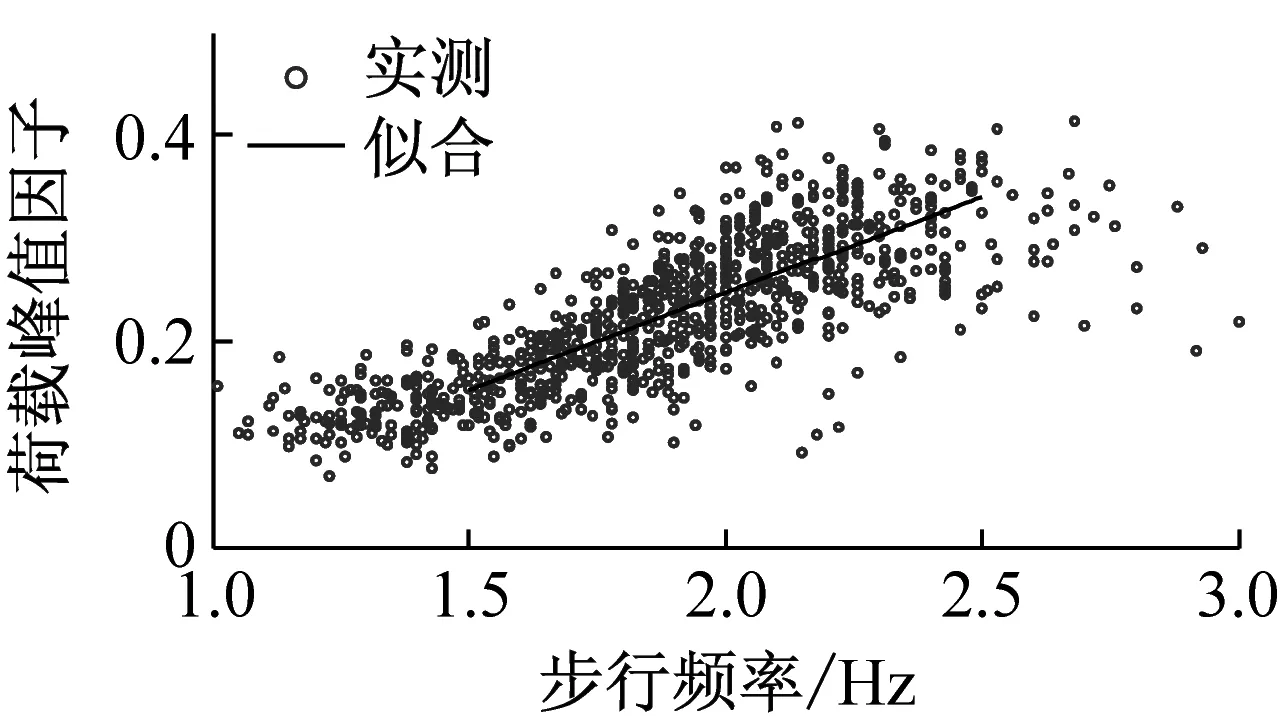
(b) 纵向步行荷载峰值因子
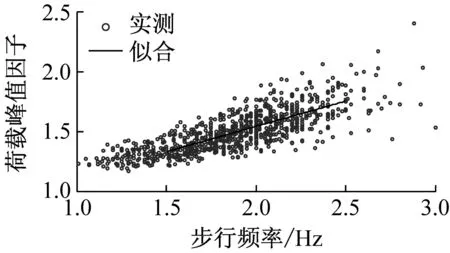
(c) 竖向步行荷载峰值因子
图5 步行荷载峰值因子
Fig.5 Peak factor of walking load
(3) 相关性分析
对每一条实测荷载记录的三个分量进行相关性分析,计算两两间的相关系数,公式为
(6)
式中:x,y代表某两个分量;xi、yi表示对应分量离散时程的第i个值。r取值在(-1,1)之间,当|r|≥0.8时,两分量可视为高度线性相关;0.5≤|r|≤0.8时,视为中度线性相关;0.3≤|r|≤0.5时,视为低度线性相关;当|r|<0.3时,说明两个变量之间的线性相关程度极弱[11]。
图6(a)~(c)分别给出了Fx和Fz、Fy和Fz以及Fx和Fy之间的相关系数,三组结果分别在-0.1~0.1、-0.5~0.5以及-0.2~0.2之间。总体上,从线性相关系数的角度,步行荷载三个分量间呈现低相关性,纵向(Fy)和竖向(Fz)间相关性略强。据此,可将人在刚性表面上行走产生荷载的三向分量视为相互独立进而分别建模。
2 荷载模型建立与参数分析
2.1 三向步行荷载傅里叶级数模型
前述分析表明,行人的连续步行过程可视作一个周期过程,且三向分量间的相关性较弱,因而三向荷载分量均可独立采用傅里叶级数形式来表示。由步行荷载傅里叶幅值谱(图4)可知,不仅在基频处出现峰值,在前几阶倍频处峰值也比较明显,表明步频的倍频成分对步行荷载也有影响,仅考虑一阶谐波的模型不能准确描述步行荷载,应该考虑多倍频的影响[12]。因此,三向步行荷载模型可表示为
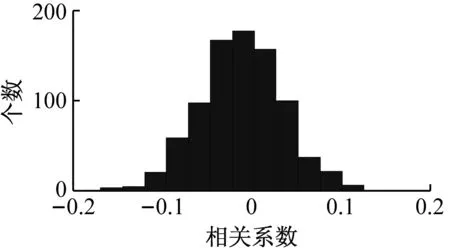
(a) 侧向荷载与竖向荷载的相关系数

(b) 纵向荷载与竖向荷载的相关系数
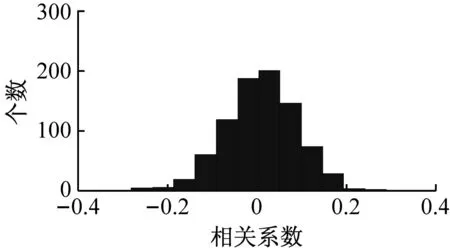
(c) 侧向荷载与纵向荷载的相关系数
图6 三向步行荷载的相关系数频数分布直方图
Fig.6 Histogram of correlation coefficients of 3-D walking load
(7)
(8)
(9)
式中:G为人体重力;αxi、αyi、αzi分别为侧向、纵向和竖向第i阶傅里叶系数,又称动载因子(Dynamic Load Factor, DLF);fx、fy、fz分别为侧向、纵向和竖向荷载频率,注意侧向荷载频率应为纵向和竖向荷载频率的1/2;φxi、φyi、φzi分别为侧向、纵向和竖向第i阶相位角,取值范围[-π,π];Nx、Ny、Nz分别为侧向、纵向和竖向荷载模型中考虑的谐波阶数。
由步行荷载傅里叶幅值谱(图4)可知,对于竖向和纵向步行荷载,4阶以上的DLF值很小,而对于侧向步行荷载,8阶以上的DLF值很小。综合考虑模型精度和实用性,对于侧向荷载考虑8阶谐波,对于纵向和竖向荷载则考虑4阶谐波。
2.2 动载因子计算方法
对于一个周期过程来说,傅里叶幅值谱基频及其倍频处的峰值即为DLF值,可采用峰值法[13]来确定动载因子。但由于行人很难保持每一步完全相同,连续步行过程实际上是窄带随机过程,在傅里叶幅值谱上表现为峰值一定范围内的能量扩散现象(图4)。计算DLF值时不能仅用峰值能量代替荷载的能量,而应考虑各阶主频附近一定范围内的能量,可采用等效能量法[14]确定DLF值。本文将各阶主频处能量扩散的范围取为0.95ifk~1.05ifk,k=x,y,z。对于步行荷载的各向分量,第i阶主频处波峰的能量为
(10)
式中:Ei是第i阶主频处波峰的能量;A(f)是傅里叶幅值谱中第i阶主频附近的频率f对应的谱值;fk,k=x,y,z分别是侧向、纵向、竖向步行荷载的频率。利用上述等效能量法可得步行荷载各向分量的第i阶动载因子为
(11)
2.3 动载因子和相位角的建议取值
首先将归一化的实测荷载时程的长度截取为整数倍的步行周期,在此基础上求其傅里叶幅值谱,并利用等效能量法计算三向步行荷载傅里叶级数模型中的动载因子,对所有实测荷载时程重复上述步骤。
为讨论各阶DLF随步行参数的变化规律,对于实验步频进行分区,共分为4个区段:1.5~1.75 Hz,1.75~2 Hz,2~2.25 Hz,2.25~2.5 Hz。计算各频率区段内DLF的均值,发现其随步频大致线性变化,通过线性拟合可得两者之间的关系表达式,如表1所示。为了适用不同应用场合,表1中同时给出了各阶DLF均值随步行速度变化的关系。随着步行频率/步行速度的增大,低阶DLF的均值呈增大趋势,高阶DLF增大趋势不明显。由于步速与人群密度密切相关[15],利用表1的关系式,可完成“假定人群密度-步行速度-步行荷载”的转换,实现人群荷载的模拟。
采用相同步骤,可研究各阶相位角随步行频率的变化情况,结果显示相位角分布非常离散,与步行频率之间没有明显的统计规律。参考众多学者相位角取均值的方式[16],本文模型竖向荷载的第二阶相位角取-π/6,第四阶相位角取π/6,其余各阶相位角均取0。
3 与已有模型的对比
傅里叶级数模型是现有荷载模型中最为常见的一种,许多学者对傅里叶级数荷载模型进行了研究并提出了不同的动载因子建议取值。已有研究大多针对侧向荷载或者竖向荷载,少有关于纵向荷载的研究。表2、表3分别总结了不同学者提出的侧向荷载和竖向荷载的动载因子建议取值。Blanchard等提出的竖向第一阶动载因子成为了BSI的荷载取值标准[17]。Murray等[18]给出了竖向前四阶动载因子,并成为了AISC的荷载取值标准。Rainer[13]、Kerr[19]、Young[4]、陈隽[8]等都指出不同的步行频率下动载因子的取值不同,并分别给出了动载因子与步频之间的关系表达式。侧向荷载模型中一般考虑5阶谐波,竖向荷载模型中一般考虑3~5阶谐波。侧向DLF1的取值范围为0.04~0.1,竖向DLF1的取值范围为0.1~0.6。显然,各学者所提出的DLF建议取值存在差异,主要可能是因为各研究中的测试者身体特征、步态特征、样本数量以及实验设备与方法等都有所不同。
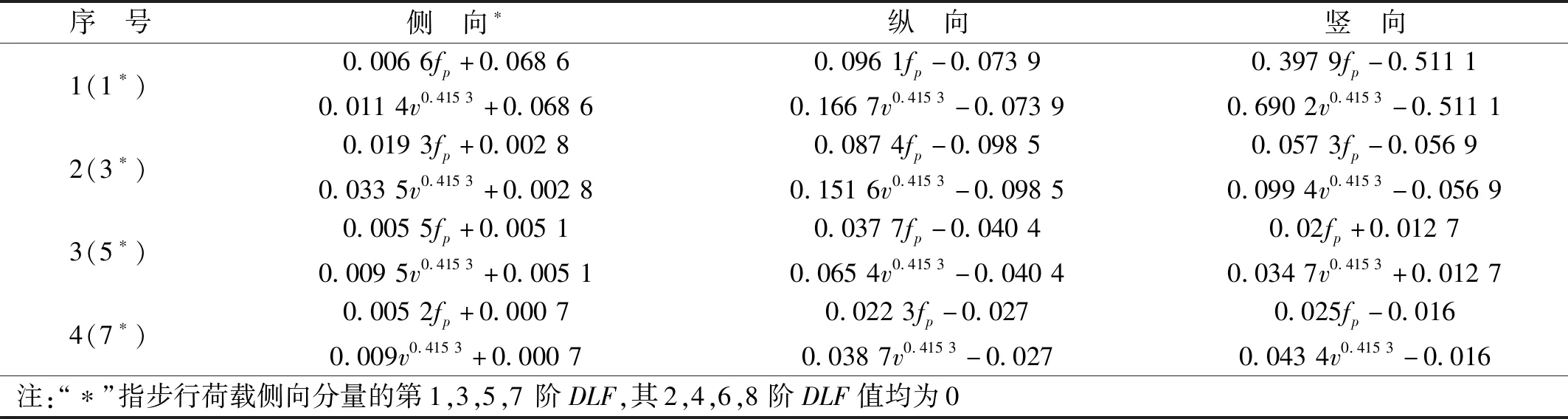
表1 各阶动载因子均值及其随步频fp和步速v的变化关系

表2 部分侧向步行荷载模型及其动载因子
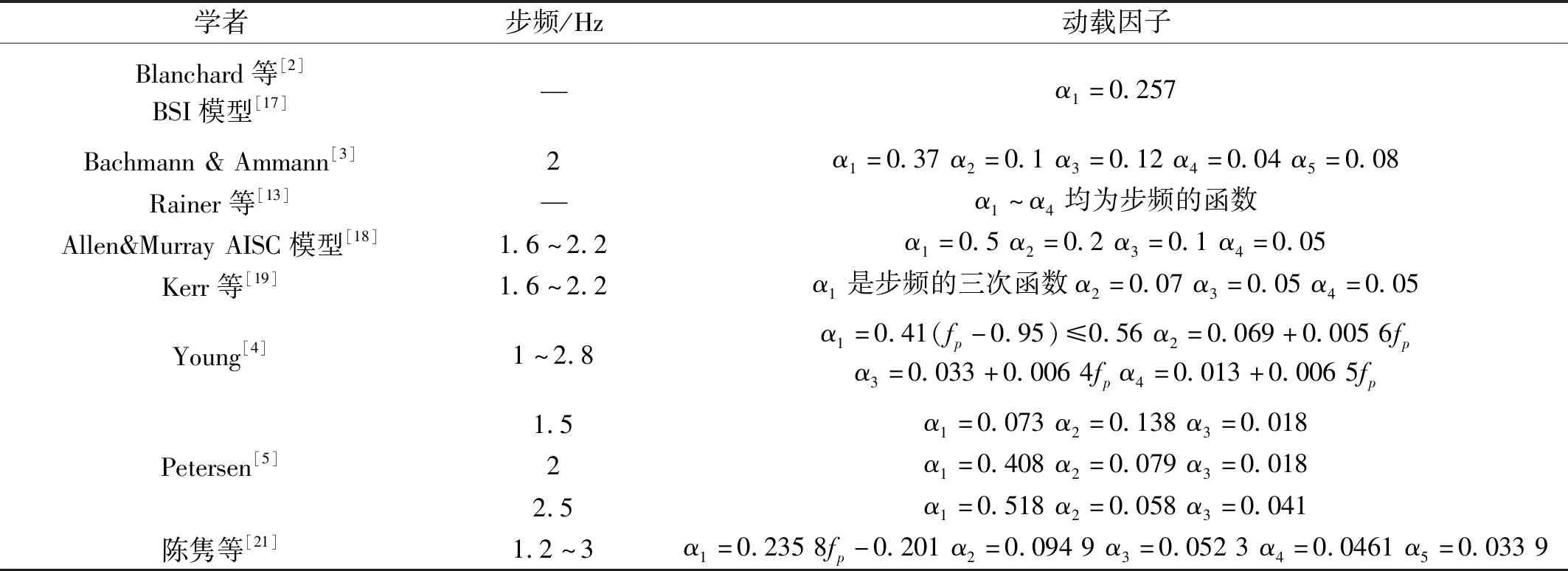
表3 部分竖向步行荷载模型及其动载因子
图7对比了本文模型和已有模型的侧向DLF取值。图中可见,本文DLF1明显高于已有模型的建议值,DLF2、DLF3也略高。考虑到侧向荷载对长柔人行桥振动分析的重要性,上述差异需要在设计中通过不同模型的试算比较予以关注。
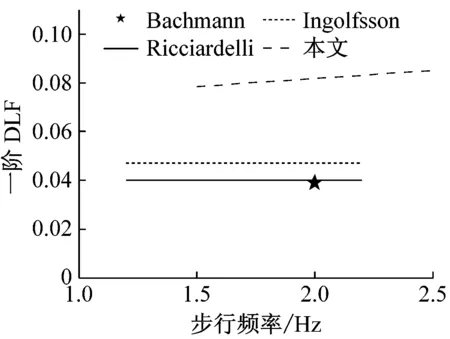
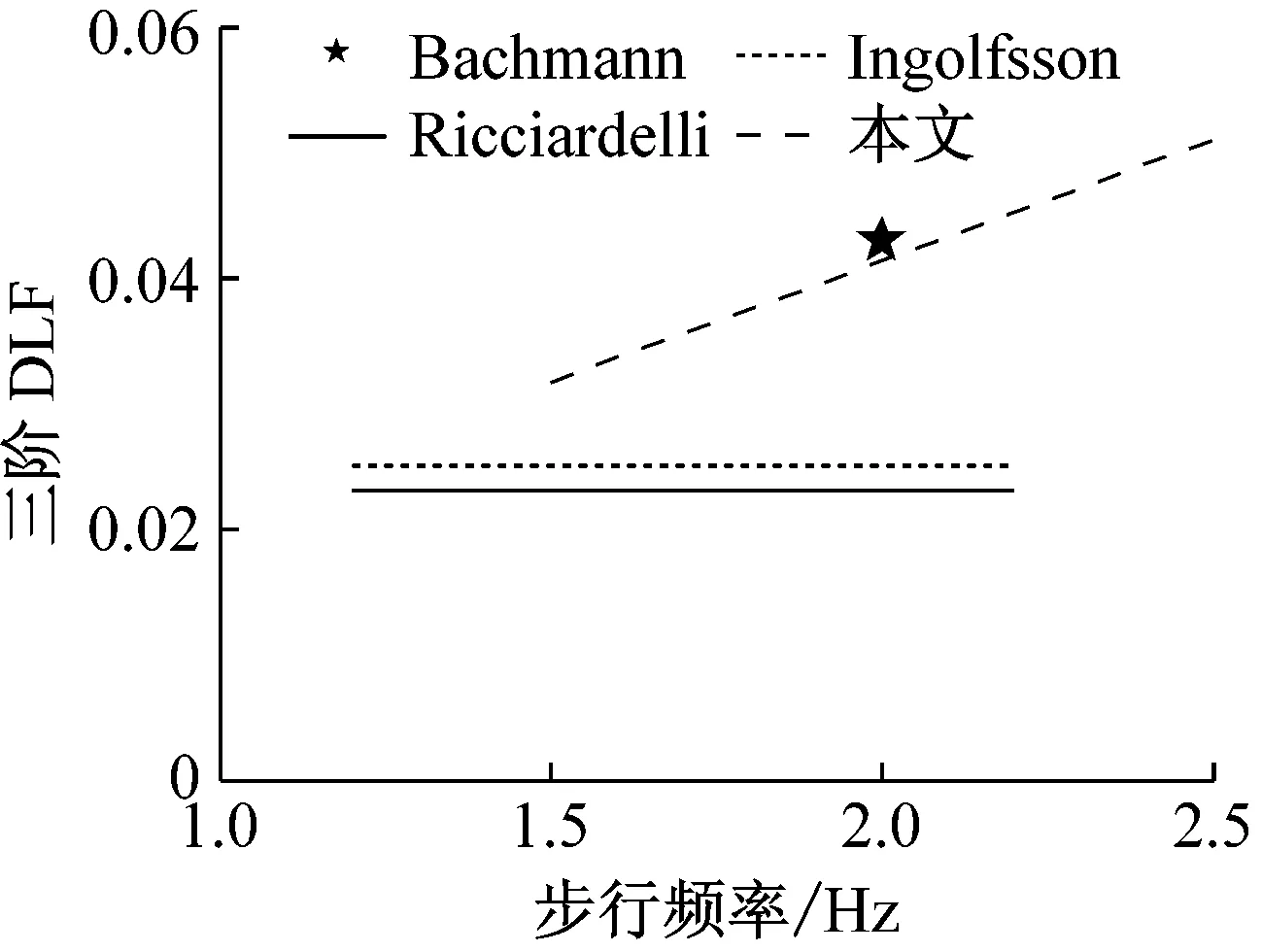
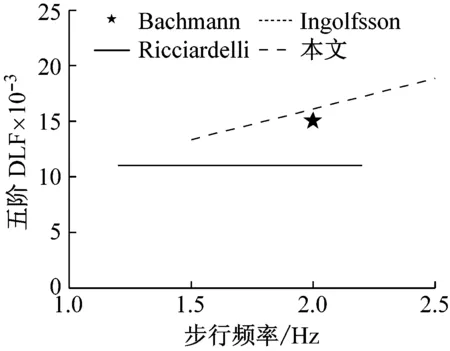
图8对比了本文建议模型和已有模型的竖向DLF取值。总体上,本文DLF取值大小与已有模型具有可比性,变化趋势类似(例如DLF1曲线和Young模型几乎完全平行),但也存在一些显著的不同。与侧向类似,不同模型间的差异提示,应根据所针对问题的目的和性质对行人荷载的计算模型进行选取。
图9给出了不同的步行荷载模型确定的时程曲线比较结果,假设人体重力为700 N,步行频率为2 Hz。本文荷载模型确定的时程曲线与已有模型具有相似性,但在幅值方面也有一定的差异。上述对比中的差异化现象,也从另一个侧面说明了基于不同数据来源、不同角度研究步行荷载特性的必要性。
4 结 论
利用在测力跑步机刚性表面上所获得的单人三向连续步行荷载实验结果,研究了三向连续步行荷载的相关性并建立了荷载的傅里叶级数模型,主要结论如下:
(1) 步行荷载三向分量的峰值大小与步行频率/速度有关,呈现随着步行频率/速度的增大而增大的趋势,竖向分量表现得最为显著。
(a) 不同模型第一阶DLF比较
(b) 不同模型第三阶DLF比较
(c) 不同模型第五阶DLF比较
图7 不同侧向步行荷载模型中的各阶DLF比较
Fig.7 Comparison of DLFs of lateral walking load from different models for each order

(a) 不同模型第一阶DLF比较
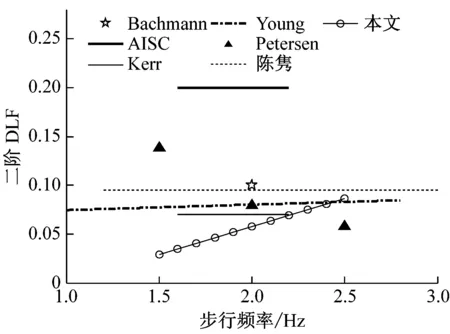
(b) 不同模型第二阶DLF比较
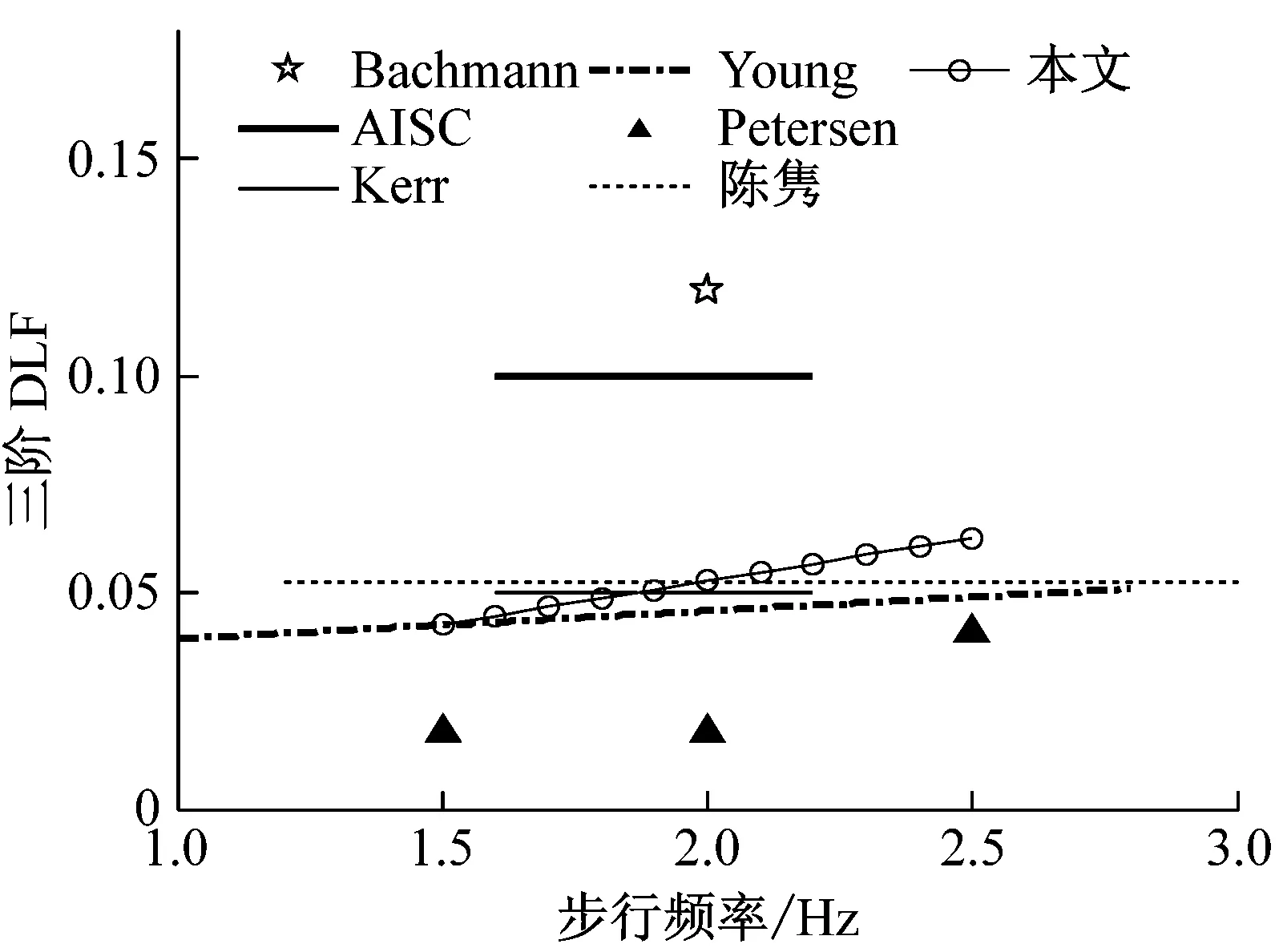
(c) 不同模型第三阶DLF比较
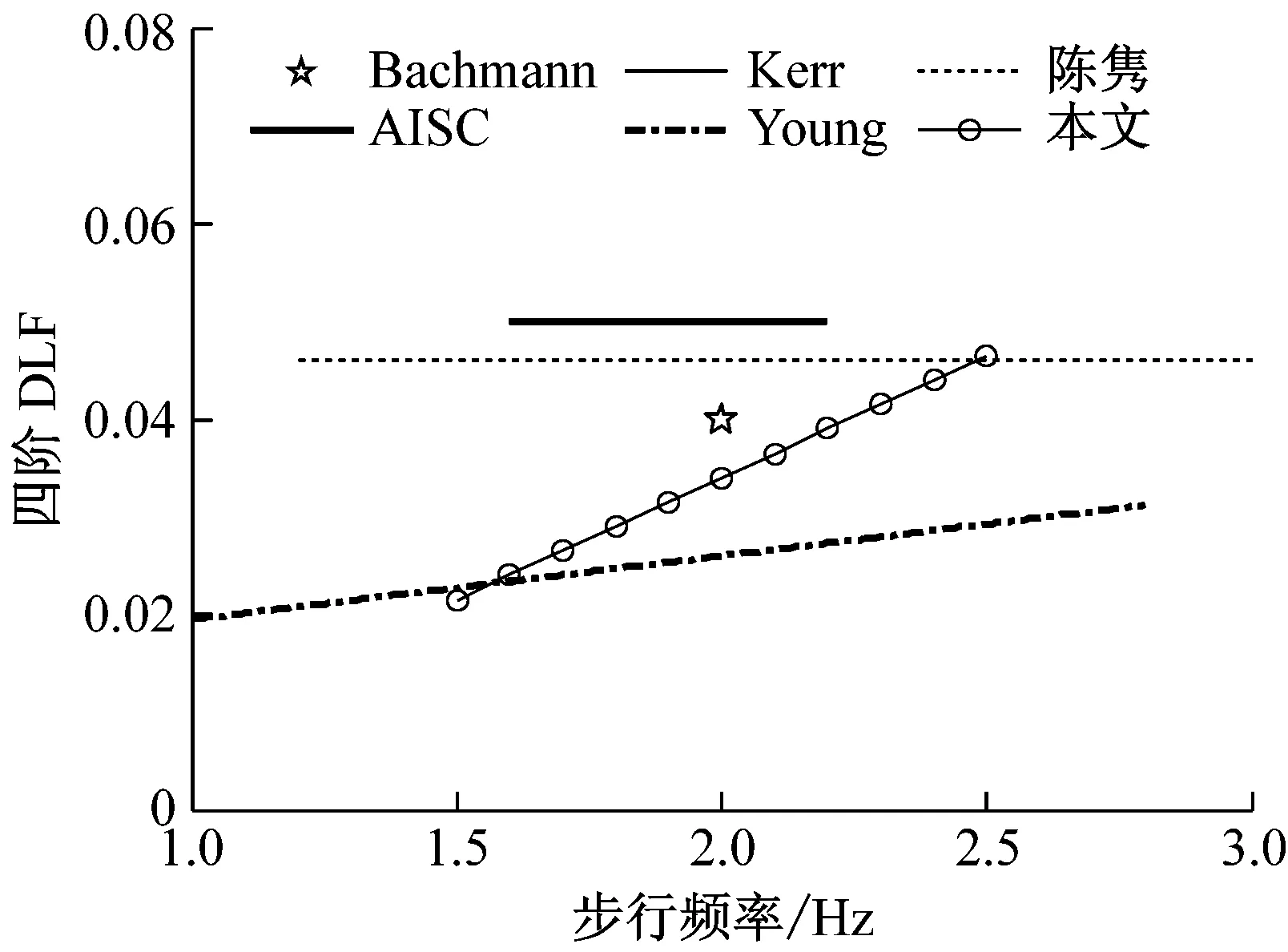
(d) 不同模型第四阶DLF比较
图8 不同竖向步行荷载模型各阶DLF比较
Fig.8 Comparison of DLFs of vertical walking load from different models for each order
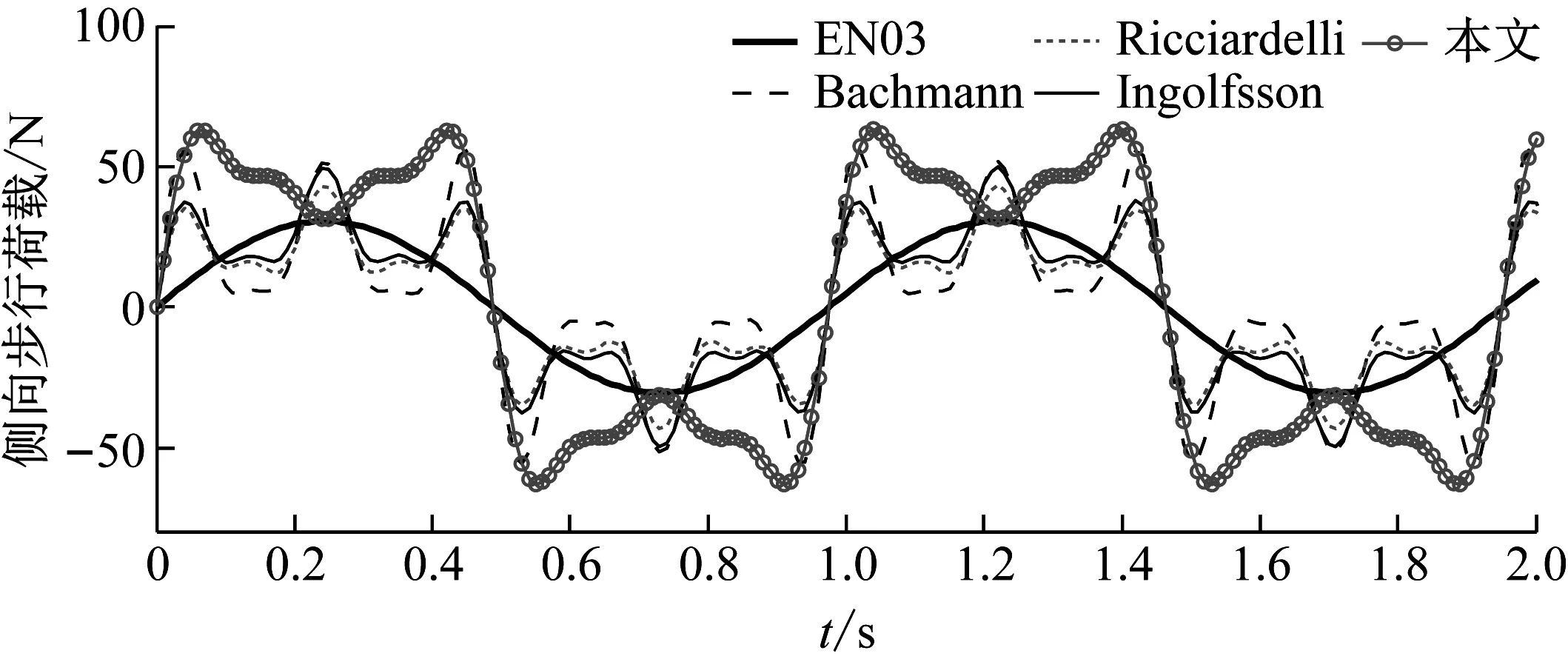
(a) 不同侧向荷载模型时程曲线比较
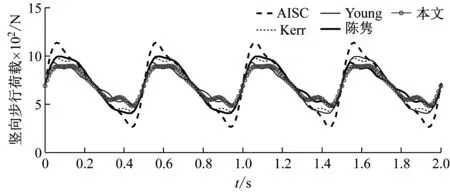
(b) 不同竖向荷载模型时程曲线比较
图9 不同荷载模型时程曲线比较
Fig.9 Comparison of time histories from different models
(2) 本文数据的相关分析结果表明,步行荷载三个分量之间呈弱相关性,因而可将人在刚性表面上行走产生的三向荷载简化为独立分量并分别建模。
(3) 分别建立了三向分量的傅里叶级数模型,并给出了模型参数的取值方法。同时给出了模型参数随步行速度的变化关系。
(4) 不同侧向和竖向荷载模型的DLF取值和时程曲线都具有一定差异,应根据所针对问题的目的和性质对荷载模型进行选取。
致谢:感谢英国埃克塞特大学的James Brownjohn教授在本研究实验数据等方面所提供的大力支持和有益建议。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
今日农业(2021年4期)2021-06-09 06:59:58
公民与法治(2020年20期)2020-11-27 01:44:46
数学物理学报(2019年2期)2019-05-10 11:32:38
测控技术(2018年7期)2018-12-09 08:58:26
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
舰船科学技术(2016年1期)2016-02-27 15:39:21
西北工业大学学报(2015年1期)2016-01-19 03:29:56