
基于正交试验法的工业机器人定位误差测量研究
2019-06-20 10:31刘旭升
电子技术与软件工程 2019年5期
刘旭升
摘要 了能够对工业机器人定位误差进行测量,创建机器人定位误差测量系统数学模型,基于正交试验表,对工业机器人定位误差需要收集的数据样本空间进行确定,测量工业机器人在样本空间中的定位误差。
【关键词】正交试验 工业机器人 定位误差
在工业科技不断发展的过程中,机器人属于类人自动化设备,正在逐渐的代替人类实现大量高精度、高强度的工作人员,被人们广泛使用。但是目前使用哪种方法对预定作用需求控制,都会因为存在的误差降低定位精度。所以,就要测量定位误差,解决实际问题。
1 工业机器人定位误差测量系统
工业机器人定位误差测量系统中的P指的是待测量靶标中心,B指的是基坐标系,M指的是FAROARM的坐标系,F指的是机器人法兰盘坐标系。FAROARM能够对靶标中心在M坐标系中的坐标进行直接的测量,并且机器人自身也能够成为测量装置得到被机器人所抓着的靶标中心P在机器人B坐标中的坐标,两者实现坐标转换,就能够到同个坐标系中统一,从而对比得到工业机器人在工作空间中各测量点位置误差。工业机器人定位误差测量系统数学模型为:
ΔP=PM-BTMFTBPF
ΔP指的是工业机器人测量点P位置误差,PM指的是P测量点在M坐标系中的坐标,FTB指的是工业机器人F坐标系和机器人B坐标系的转换矩阵,BTM指的是机器人B坐标系和M坐标系的转换矩阵,PF指的是P点在F坐标系中的坐标。
使用机器人D-H方法创建连杆坐标系,在运动学分析过程中,相邻连杆之间坐标系转换矩阵为:
以此表示,为了能够得到工业机器人在工作空间中不同测量点的定位误差,就要实现BTM和PF的预先标定。之后,只要对机器人各关节角进行改变,就能够对机器人工作空间中的多组定位误差数据进行测量。
2 定位误差测量
工业机器人定位误差和机器人工作空间中的位姿具有密切关系,为了能够将机器人实际定位误差分布情况进行展现,从理论上分析,收集数据越多,对于机器人结构参数标定就会越有利。但是实际情况是要降低收集数据量,为了对此问题进行解决,使用正交实验法设计原理在实验之前合理安排实验的过程。对测量样本空间正交试验过程进行确定,使工业机器人六个转动关节成为确定机器人空间位姿指标影响因素,充分考虑实际情况,所有因素都取五个左右水平,之后实现定位误差测量。
定位误差测量的目的就是对机器人手臂末端运行情况和定位误差分布的情况进行观察,本文利用SIAI机器人。在利用正交试验法实现测量的过程中,要收集数据。充分考虑测量范围有限,实际测量样本空间使用两次正交表得到。先划分机器人整体空间成为25个样本子空间,之后在所有子空间中设计相应测量点。
以机器人从零点运行到工作区域中的点,利用定位误差测量收集此点的位置。通过测量之后得到的最大驻留点距离为1158.31um、1114.6847um,机器人重复定位精度指的是56.60um,通过两次测量结果表示,距离误差分布具备一定重复性,所以此结果并不是由于随机扰动导致的。以第一次得出的定位误差,实现程序中原始驻留点位移补偿调整。补偿之后駐留点最大距离误差就是227.84um,降低定位误差为19.67%。实验结果表示,此机器人绝对误差有80%能够补偿。
3 实例验证
使机器人运行到305个不同工位中,其中300个工位辨识参数,在取点的过程中使机器人在关节空间中的各关节都能够运动,基于笛卡尔空间,使末端根据X、Y、Z运动,控制坐标系位置不发生变化,从而提高辨识参数值的精准性。其他工位实现重复性的实验,进行结果对比,验证测量精度及补偿结果。
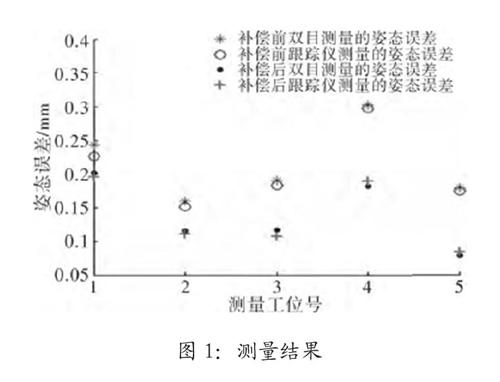
因为机器人控制模型源码开放,从而得到连杆参数实际值能够及时的到机器臂控制器进行反馈,修正名义值。修正参数补偿误差之后,对机器人重新控制,实现机器人末端实际值的再次测量,测量结果见图1。
通过大量的反复试验得到以下结论:
(1)此测量方法的精度比较高,并且满足实际需求,除了会受到相机测单点精度影响以外,还会受到球体加工精度和表面粗糙度限制。
(2)通过测量结果表示,双目视觉及激光跟踪仪实现标定,补偿之后机器人定位精度会有所提高。
(3)在编制软件的过程中,因为球体靶点编号识别要求大量常量实现对比运算,所以具有较大的数据库,对软件数据运算速度会有所影响。基于不对机器人本体末端额定负重比影响的前提下,通过实验需求重新设计球体,并且布置靶点,还能够使用多面体进行代替,棱边规则性和根据特征识别靶点编号实现求解坐标姿态变换矩阵比较简单。在今后研究过程中,要充分考虑结合遗传算法等搜索功能,使程序运算量得到降低。
4 结束语
本文将FAROARM成为机器人定位误差测量过程中的工具,创建机器人定位误差测量系统数学模型,并且提出了测量系统中收集样本数据的方法,创建实际机器人定位误差侧拉滚系统,对机器人在样本空间中的定位误差进行了测量,表示正交试验法测量工业机器人定位误差效果良好,能够为后续机器人定位误差补偿方法的深入研究打下基础。
参考文献
[1]刘振,陈万米,熊奇.移动机器人测程法定位误差分析与校正[J].电子测量技术,2017(12):75-81.
[2]邾继贵,邹剑,林嘉睿.面向测量的工业机器人定位误差补偿[J].光电子.激光,2013(04):746-750.
[3]韩哈斯额尔敦,曾志革,刘海涛等.光学加工机器人定位误差测量与分析[J].光电工程,2017,44(05):516-522.
[4]朱剑芳.基于激光测量的工业机器人定位研究[J].激光杂志,2018,39(10).
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
汽车科技(2016年6期)2016-12-19
山东农业科学(2016年11期)2016-12-17
