
基于四轴飞行器的区域人数识别
2019-06-15 01:01花蕾时春翔林红
数字技术与应用 2019年3期
关键词:图像处理
花蕾 时春翔 林红


摘要:针对传统的视频监控人数统计系统,本文设计了一款基于四轴飞行器的人数统计系统。利用四轴飞行器搭载的相机进行视频采集,获取某一区域的人流信息;通过无线图像传输器将视频信息传输至PC端,PC端对视频信息进行图像处理分析后实时给出人数统计结果,实现了区域人数识别的高度灵活性。
关键词:四轴飞行器;图像处理;人数统计
中图分类号:TP391.41 文献标识码:A 文章编号:1007-9416(2019)03-0106-03
0 引言
自从计算机视觉诞生以来,基于视频监控的人数统计便成为了一个重要的研究方向。由于其在实际生活中的应用很多且前景广阔,所以人数统计在计算机视觉这一领域具有举足轻重的地位。近年来,大量的科研人士或商业人士都积极投身于这一领域,做出了巨大的贡献,而且取得的了极具价值的成果。如今,基于视频监控的人数统计方法已有很多且趋于成熟。比如基于区域的人数识别[1]、基于头部特征的检测方法[2-3]、利用轮廓特征的检测方法[4]、基于头发纹理的检测方法等[5-6]。目前绝大多数的人数识别系统都需要安装固定的监控才能实现其功能,不具备高度的灵活性,而且识别的区域固定。在一些旅游景点、户外活动场所等不易安装监控的区域,利用可移动拍摄装置则可以轻易获取某区域的人流信息。当发生紧急状况时,管理者可以迅速采取紧急措施,避免不必要的损失。
鉴于当前无人机的研究成为热门领域之一,本文设计了一个基于四轴飞行器的人数统计系统。通过四轴飞行器搭载相机来获取特定区域的人流信息;再由无线图像传输器将视频信息传输到PC端;PC端采用基于区域的人数识别算法对接收到的视频信息进行图像分析处理,进而实现活动区域的跟踪与区域人数的统计。解决了传统人数识别系统只能识别固定区域的问题,实现了区域人数识别的高度自由性。而且相比于安装固定监控,利用四轴飞行器实现人数统计的成本更低,适用范围更广,可移植性更高。
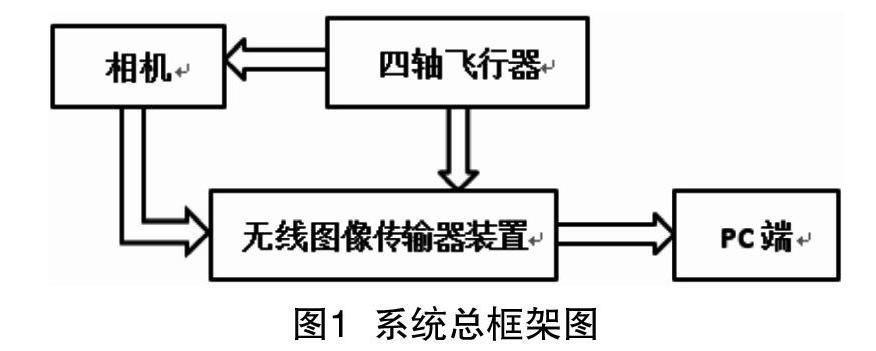
1 系统设计
基于四轴飞行器的区域人数识别系统总框架图如图1所示,由相机、四轴飞行器、无线图像传输器装置、PC端构成。四轴飞行器搭载相机获取区域的视频信息并传输至无线图像传输器装置;无线图像传输器将相机获取的视频信息通过5.8GHZ射频无线网络传输到PC端,PC端接收到视频信息后,用户可将视频载入程序;通过图像分割、图像滤波等处理实现人数的统计并实时显示统计结果。
2 系统硬件设计
系统硬件框图如图2所示。
其中UBLOX-6M GPS模块向飞行控制器提供当前的位置信息,确保飞行器可以实现定点悬空以及自动返航功能;由遥控器通过WLAN向接收机发送控制信号;接收机在接收到信号后向飞行控制器(STM32 Cortex M4)发送控制指令,飞行控制器根据控制信号和位置信息,结合内部加速度计和陀螺仪所提供的反馈信息,向电子调速器发送控制信号,控制电机转速,使飞行器保持对应的飞行姿态和飞行速度;CMOS相机获取视频信息并将其传输到TS5828 5.8G无线图像传输器;无线图像传输器通过WLAN发送视频信息至PC端,从而完成视频信息的采集与传输。
3 系统软件设计
本文采用基于区域的人数识别的方法进行人数统计,开发环境为Visual studio 2017和开放源代码计算机视觉库opencv 3.2.0。
Visual Studio 2017是微软于2017年3月8日正式推出的新版本,其内建工具整合了NET Core、Azure 应用程序、微服务、Docker 容器等所有内容。OpenCV是一个开源的BSD许可库,包括上百个计算机视觉算法[7]。
软件设计框图如图3所示,其中系统初始化子程序包括:选择视频路径、创建显示窗口、背景创建及初始化。图像处理子程序框图如图4所示,包括图像分割、图像滤波与二值化、轮廓提取与人数统计。
3.1 图像分割
为了消除背景对检测结果的影响,需要将图像的背景与前景分割。常用的分割方法有:帧差法、背景减除法、ViBe算法、ViBe+算法等[8]。
本文采用的背景减除法是一种有效的运动目标检测方法,其关键部分在于背景建模和背景的更新。通过当前帧与背景图像的差分来实现对运动目标的检测。相差较大的像素区域即为运动区域,反之则为背景区域。针对不同场景的动态变化,通过自适应混合高斯背景建模以减小背景变化对分离运动目标的影响。
3.2 图像滤波与二值化
经过图像分割后的源图包含大量的椒盐噪声,为了避免其对后期图像处理很不利,需要对图像进行滤波处理,以消除图像中的噪声。常用的滤波方法有:均值滤波、限幅滤波、中值滤波、算术平均滤波。本文采用的圖像滤波方法为中值滤波,是一种非线性的平滑滤波方法。对于椒盐噪声具有较好滤波特性,同时还可以有效的保护图像的边缘特性。之后对图像进行二值化处理,将图中大于设定阈值T=150的像素点置为255(黑色),小于设定阈值T的像素点置为0(白色)。
3.3 轮廓提取及人数统计
调用FindContour函数对所获得的二值化图像进行轮廓查找,将查找到的点以点向量的形式存入vContours中并调用minArea Rect函数生成最小外接矩形。通过所设置外接矩形面积的阈值以及矩形的长宽比例综合判断人数。
4 实际处理过程示例
实际测试硬件为Inter i5-4210H 2.9GHZ,内存8GB;软件为Visual Stdio2017,引用库opencv3.2.0;操作系统为windows10。区域大小选取640*480,视频采集帧率为24.95帧/秒,图像处理速率为650ms/fps左右。实时处理结果如图5所示。
5 结语
基于四軸飞行器的区域人数识别系统弥补了传统的视频监控识别系统的弊端,通过四轴飞行器进行视频采集,抛弃了只有通过安装监控才能获取区域人流信息的传统方法,极大地提高了系统的灵活性与适用性。实际测试表明,在场景较为单一的条件下,系统实现了预期功能。在复杂场景、天气恶劣的情况下,系统的识别准确率会有所降低。通过对人数统计算法以及四轴飞行器的进一步完善,可进一步提高飞行器的飞行效率以及人数统计的准确率,扩展系统在人数统计方面的应用前景。
参考文献
[1] 赵明瀚,王晨升.基于视频的人数识别方法综述[J].软件,2013,34(03):10-12+54.
[2] 刘辉,朱闯,张天永,陈域.一种基于头部特征的人头检测方法[J].光电子技术,2014,34(01):21-25.
[3] 顾德军,伍铁军.一种基于人头特征的人数统计方法研究[J].机械制造与自动化,2010,39(04):134-138.
[4] 何扬名,戴曙光.利用轮廓特征进行人头识别的方法[J].计算机工程与应用,2010,46(29):164-166.
[5] 吴子强.基于头发的人头检测与跟踪[J].现代计算机(专业版),2009(09):76-77+80.
[6] 范欣欣.基于图像的人数统计方法综述[J].无线互联科技,2018,15(12):98-101.
[7] 毛星云,冷雪飞,王碧辉,吴松森.OpenCV3编程入门[M].电子工业出版社,2015.
[8] 汪欣,吴薇,曾照.基于视频的人脸检测算法研究[J/OL].电子科技,2020(02):1-7[2019-04-13].
Region Number Recognition Based on Four-Axis Vehicle
HUA Lei,SHI Chun-xiang,LIN Hong
(Wenzheng College,Soochow University, Suzhou Jiangsu 215000)
Abstract:Aiming at the traditional video surveillance statistics system, this paper designs a crowd counting system based on four-axis aircraft. The Video acquisition is carried out by the camera mounted on four-axis vehicle to obtain the flow information in a certain area. The obtained Video information is transmitted to PC through wireless image transmitter. The image processing and analysis is carried out on PC and the result of number statistics is given. The results show that the realized system is efficient and flexible.
Key words:four-axis vehicle; image processing; population statistics
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电子测试(2018年6期)2018-05-09
电子测试(2017年11期)2017-12-15
电气化铁道(2016年4期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中央民族大学学报(自然科学版)(2014年1期)2014-06-11
