
不同海况条件对某型号散货船轴功率修正值影响规律研究
2019-06-13 09:25:42赵献虎黄智强温小飞
中国修船 2019年3期
赵献虎,袁 强,2,黄智强,温小飞
(1.浙江海洋大学 港航与交通运输工程学院,浙江 舟山 316022; 2.武汉理工大学 能源与动力工程学院,湖北 武汉 430063;3.浙江增洲造船有限公司,浙江 舟山 316000)
随着温室效应的加重,国际海事组织第62次会议对船舶能效指数(EEDI)提出了强制性要求,以期望达到减少CO2排放的目的[1]。与之同时国际船舶营运利润日益下降,国际燃油价格波动明显,船东对船舶的航速和功率等参数也更加关注,因而,需要对船舶EEDI进行计算和分析,并检验其数值是否满足相关规范要求。船舶EEDI计算需要提供船舶在静水条件下的航速和轴功率,但是实船的试航条件很难达到规范中所要求的理想状态,因此对船舶的试航实测航速和轴功率进行修正计算,获得船舶在深水、无风、无浪、无流等海况参数条件下的航速和轴功率。为进一步研究风、浪和流等参数对船舶航速和轴功率的影响规律,本文模拟风速、浪高、浪的入射角等海况参数进行线性变化,并假定在船舶航速不变的情况下,采用相关修正计算数学模型,对船舶轴功率修正值进行模拟计算分析,得出风速、浪高、浪的入射角等海况参数对船舶轴功率修正值影响规律,为船舶EEDI计算和相关设计提供参考数据,具有一定借鉴意义。
1 航速修正计算理论
1.1 风速修正
根据ISO15016中得出船舶所受的额外阻力主要来自试航过程中受到风、浪、涌的作用,但具体过程不同软件各有不同,本文主要是对风和浪的附加阻力进行研究,通过修改实船数据中的风速、浪高、浪的入射角得出船舶修正功率的变化规律,抵消该船增加风阻所需的额外动力的公式为:
(1)
式中:ΔPwind为修正功率;Rwind为抗风性;Rair为在无风状态下由于船舶运动造成的空气阻力;Vs为船速;ηs为轴效率系数,轴效率系数通常为0.990,但会在0.960~0.995之间浮动;ηd为推进效率系数。
一旦相对风速和方向与船速度和路线已获得, 可计算抗风性。抗风性公式为:
(2)
式中:ρair为当时空气的密度;Vr为针对当前校正的相对风速;Cx(β)为风系数,定义为风的入射角的函数,β为基于真实风的一组运行视角的平均值;A为风面积(正面投影面积)。
因此得到空气阻力为:
(3)
1.2 计算流速
波浪的增加阻力必然导致船速度损失。为获得理想条件下精确的速度-功率关系, 试验结果必须修正到实际中已经增加的波浪阻力。
(4)

在线性船舶运动理论中, 波浪的增加阻力平均值通常是用传递函数表示。
(5)
式中:Raw(ω,β′)为在规则波中增加阻力,ω为波的频率,β′为浪的入射角;S(ω)为波能的谱密度;ζa为波振幅。
波的增加阻力常以无量纲系数表示:
(6)
式中:B为型宽;L为船长;ρ为海水密度;g为重力加速度。
根据实践经验,波高应限制在船舶长度(L>100 m)的1.5%以下或低于1.5 m(L<100 m)以下。因为在海里船舶的速度叠加了遇到的波浪频率,从而导致实际上形成较短波浪。在这些条件下,波浪引起的船舶运动中起伏和俯仰是可以忽略不计的,因此附加的波阻力主要是由反射波引起的。波浪通过船的首部造成影响。并且由于短波的深度穿透是有限的,反射实际上是由水线几何学控制的。因此在相对短波中,大型浮结构不规则增加阻力的平均值可以近似为:
(7)
(8)

在实船试航过程中,实测环境比较复杂,有时会与拖船试验数据相差很多。这时就需要通过ISO中规定的经验公式用来修正数据,从而得到实船在相对理想状态下的航速。
2 实船试航试验
船舶压载试航状态包括轻压载和重压载,船厂设计部门根据船模试验和相关规范要求并结合实际情况,确定本船试航压载状态为重压载状态:艏吃水7.9 m,艉吃水9.2 m,如表1所示。根据相关规范要求,船舶航速测试区海况为:风力不超过蒲氏4 级,海浪不超过3 级,水深约40 m,潮流平稳。同时在进行测速前,船舶需有足够的助航距离,测速时船舶须保持正确航向,航速方向与测速标记保持平行,偏差应不大于±2°,最大操舵角度应不大于±1.5°,主机转速保持稳定。如果试航测试海况不能满足上述要求,试验数据须做相应修正。

表1 试验船舶状态
本次试航是在相对平静、开阔的深水海域进行,满足船舶设计吃水要求且船底干净,在符合船舶主机功率(不带15%海上裕度的持续常用功率)的条件下,船舶航速和轴功率利用相关专业测量仪器设备进行测量。根据制定的试航大纲要求,船舶需测量主机在4种负荷工况(即50%MCR、75%MCR、85% MCR 和 100%MCR)下对应的航速和轴功率,每种工况测量一个来回航程。
船舶试航测试航线,如图1所示。试航船舶基本参数,如表2所示。本次试航实测航速、轴功率以及海况参数,如表3所示。
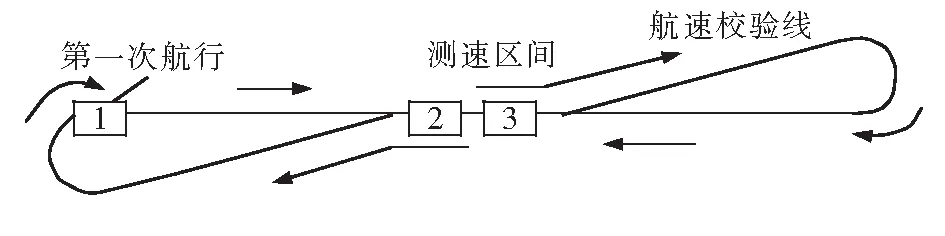
图1 航速测定航线

船舶垂线间长/m型宽/m型深/m设计吃水/m额定功率/kW额定转速/(r/min)排水量/t194.532.2611.311.38 54894.573 086
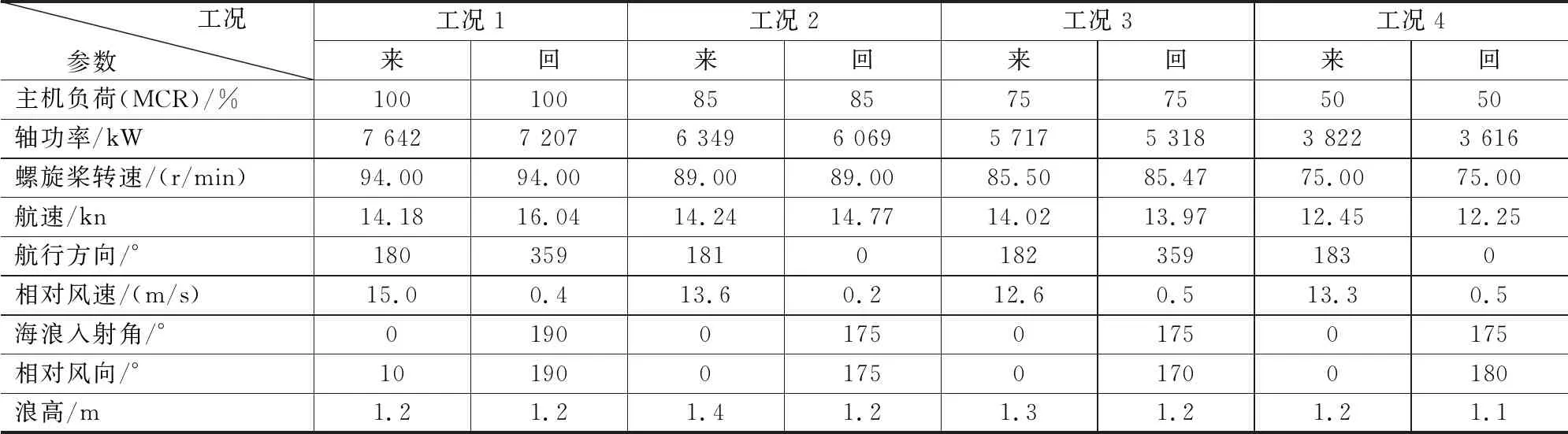
表3 试验船舶数据
3 航速修正及影响因素分析
3.1 实船修正结果
根据相关修正计算理论和数学模型以及参考实船测试时海况参数,对实船测试数据进行修正计算,得出船舶实测航速和轴功率以及修正后航速与轴功率的关系如表4所示。

表4 试验修正功率
由表4得知4种工况下试航测试得到的具体参数,同时把实船的外界环境修正到0.0 m/s的风速,0.00 m的有效波高和0.00 s的波周期得出修正后的具体功率。并根据规格书:在平静(无风无浪)开放深水海域,船舶设计吃水为11.3 m且船底干净,船舶主机功率为5 320 kW的条件下,船舶的航速大约为14 kn。 在合同规定的试航条件下,主机功率为75%MCR时船舶的平均修正航速为14 kn,考虑试验中不确定因素太多,使所得参数稍微大于实际航行所得参数,同时也与相同航速下实船功率大于试验功率的结果相符合。
3.2 改变不同海况条件对修正功率的影响
在已通过实船数据采集的海况条件下,根据相关规范相对风速在8 m/s范围内线性变化,浪高则是在3 m范围内变化。图2为改变风速对修正功率的影响。其横坐标表示风速以相对风速2 m/s线性增加,纵坐标表示修正功率的变化值。由图2可以看出,因为船舶来回处于的状态正好相反,而航速也不同,因此所需的功率有所偏差。在相对风速按照线性增加的条件下,修正功率也线性增加,但根据增加的值可以看出增加的修正功率不大,因此得到相对风速的改变对船舶的修正功率影响不大,因此对航速修正也不大。
在航速和功率等条件不变情况下改变工况的浪高得到以下的修正功率变化曲线,如图3所示。

图2 改变风速对修正功率的影响

图3 改变浪高对修正功率的影响
图3中横坐标表示各个工况实际浪高的增加值,并且保证浪高最大值在规定试航高度下,同时结合公式(4)得到航速不变的情况波浪增加的功率也就越来越大,因此可以得到:每种工况在浪越来越高的状态下所需的功率越来越小,因此修正功率也就越来越大,导致顺浪情况下的曲线变化越来越快。而逆浪状态下,在航速和功率不变的情况下增加外在阻力,根据螺旋桨的基本理论[2],螺旋桨的轴推力效率与阻力成正比,也就是船舶受到阻力越大,推进效率也就随之越高。结合公式(4)可知,轴推进效率增高导致修正效率增加,抵消波浪阻力,所需功率也就变小,因此逆浪航行的情况下,修正功率变化不大。
在航速和功率等条件不变情况下,增加各个工况的浪的入射角,得到的修正功率变化曲线如图4所示。

图4 波浪入射角与修正功率
图4中横坐标表示各个工况的浪的入射角以40°线性增加,纵坐标表示每个工况下修正功率的变化值。图中可以得出在入射角180°时各个工况对船舶修正功率影响最大,因为试航当中的浪作用于船首,而180°时作用时船身,因此导致船受到的外力变化最大,故修正功率在180°时变化最大。
5 结束语
本文对64 000 t散货船进行航速修正得到该船试航状态下的修正功率和修正航速的变化。同时在对风速、浪高、浪的入射角逐步进行线性修正,进而得到修正功率的变化,得出浪高对船舶修正功率影响最大的结论。
猜你喜欢
舰船科学技术(2023年7期)2023-05-10 04:34:58
装备制造技术(2020年3期)2020-12-25 05:22:08
船海工程(2019年6期)2019-12-25 06:12:50
科技经济市场(2019年3期)2019-05-16 12:51:42
广东造船(2018年4期)2018-10-09 06:08:18
中国航海(2017年3期)2017-11-03 02:46:54
船海工程(2015年4期)2016-01-05 15:53:38
船海工程(2015年4期)2016-01-05 15:53:36
应用海洋学学报(2015年3期)2015-11-22 07:39:14
舰船科学技术(2015年8期)2015-02-27 15:38:44
