机器人柔弹性仿生电子皮肤研究进展
2019-06-13 09:04邱澜曹建国周建辉江军王晓玲缪存孝
中南大学学报(自然科学版) 2019年5期
邱澜,曹建国,周建辉,江军,王晓玲,缪存孝,3
机器人柔弹性仿生电子皮肤研究进展
邱澜1,2,3,曹建国1,2,3,周建辉1,2,4,江军1,2,3,王晓玲1,缪存孝1,3
(1. 北京科技大学 机械工程学院,北京,100083;2. 北京科技大学 智能机器人创新研究院,北京,100083;3. 北京科技大学 人工智能研究院,北京,100083;4. 华北理工大学 迁安学院,河北 唐山,064400)
仿生电子皮肤触觉传感器是实现机器人智能化发展的先决条件,机器人等复杂的三维载体表面或活动关节部位接触压力感知的可延展的柔弹性电子皮肤高柔性、高弹性和灵活可调等适形性要求高且具有广阔的应用前景。由于常用的无机半导体材料和金属材料及其化合物断裂极限应变较低,难以满足可延展的柔弹性电子皮肤的要求,因此,具有可延展性的二维纳米膜、纳米带或一维纳米线等电极或互联导体得到广泛应用;基于力学屈曲的薄膜−基板结构和纳米级导电元件的结构设计可有效改善无机材料的受力情况,明显提高材料整体的可拉伸性;采用纳米制造等新型技术制备的新型材料和结构一体化使得可延展的柔性电子皮肤的柔弹性显著提高。高柔弹性仿生电子皮肤触觉传感器可提高机器人的环境适应性,有利于机器人与人类之间建立起一种新型的人机共融 模式。
机器人;压力感知;电子皮肤;柔性;柔弹性
人类通过视觉、听觉、触觉、嗅觉和味觉等感知外界环境。针对机器人的研究,利用电子技术对人类的各种感知进行模拟,是实现人机无缝衔接、人工智能和仿生机器人发展的关键[1−5]。相对于视觉、听觉而言,触觉的模仿十分困难,尤其是压力感知的电子皮肤触觉传感器最具挑战性且应用潜力最大,具有高柔弹性的电子皮肤触觉传感器可助力于下一代机器人、软体机器人等载体的智能化、无人化和多功能化[3−4],具有广阔的发展前景,是当今国际学术研究的热点问题之一[5−7]。触觉本身有很强的敏感性,可直接测量对象和环境的多种特征。电子皮肤触觉传感器(tactile sensors for e-skin),又称人工皮肤(artificial skin)、敏感皮肤(sensitive skin)、智能皮肤(smart skin)、仿生皮肤(bionic skin)等[6−8],是一种能够通过接触表征出被测物体的性质(表面形貌、质量等)或数值化接触参量(力、温度等)的设备或系统,可覆盖于复杂的三维载体表面,并准确感知周围环境的各种信息,是机械、电子、仪器和医学等领域的研究热点之一[7-10]。为了覆盖机器人复杂的三维表面和活动的关节部位,电子皮肤阵列触觉传感器在保证其精度、灵敏度等指标的同时,通常还必须具有高柔性和高弹性等,其研究受到人们的高度重视[10−15]。近年来,我国和美国、日本等国家均投入了巨大的人力与物力,对压力感 知的高柔弹性电子皮肤的重点与难点问题进行研究[16−18]。
1 机器人对电子皮肤柔弹性的要求
电子皮肤触觉传感器在机器人触觉感知方面有不可替代的作用,在机器人体表或表层集成电子皮肤可使其更加“类人(humanoid)”和智能化;具有高柔弹性的电子皮肤触觉传感器阵列能够覆盖于机器人的多部位,可以模仿甚至超越人类皮肤的感觉功能,有效地实现机器人的触觉感知[6−7]。自然状态下的人类皮肤不仅具有高柔性,而且具有高弹性。人类手腕处皮肤拉伸如图1所示。CODY等[19−20]的研究结果表明:人体体表中手腕部位的皮肤柔弹性最高,弯曲时的最大拉伸率可达到20.4%,可贴合于三维复杂静/动态表面同时完成触觉感知,卸载后皮肤的高弹性使其可恢复原来的形状。
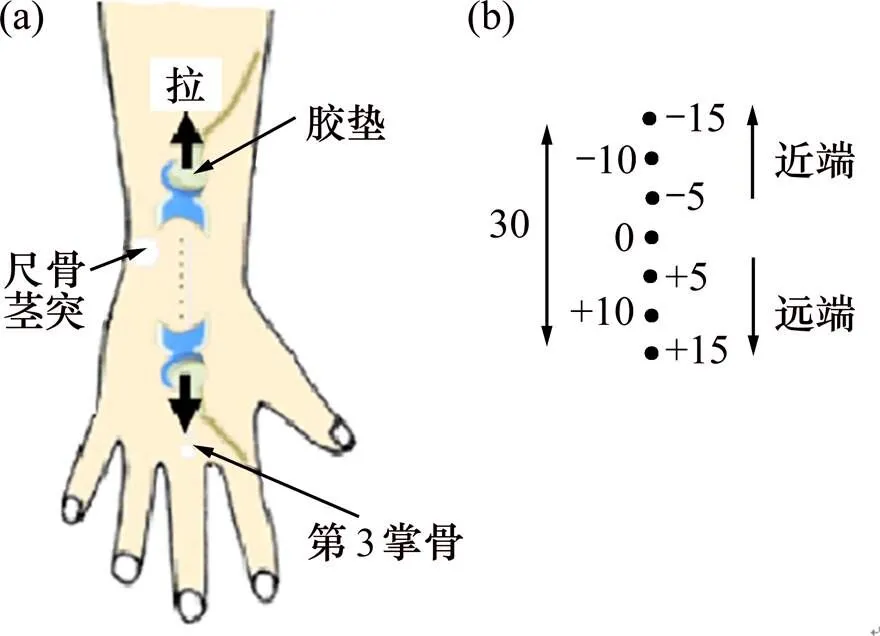
数据单位:mm
近年来,美国、日本、英国和我国等对用于机器人触觉感知的电子皮肤的研究均予以高度重视,如美国国家自然基金会NSF和国防高级研究计划局DARPA整合了来自学术机构、工业界和政府部门等的研究人员,专门成立了电子皮肤研究会。触觉是实现感知最重要的感官,不同于视觉和听觉,其信息是双向流动的[21],通过触觉感知和调节交互作用力的大小和方向,能够极大地克服依靠力矩、距离等感知带来的不足,提高系统的稳定性和准确性,可配合其他类型传感器辅助灵巧手完成精细操作[22]。触觉感知辅助的机械臂如图2所示。
美国麻省理工学院(MIT)研制的“电子皮肤”先期应用于美国国家宇航局NASA的Robonaut航天机器人的前臂、肩部和躯干进行触觉感知,不仅能感知到物体的地点和方位,而且能获得物体的硬度等信息,将来有望使机器人具有与人类更相似的触觉并增强其与人类的互动能力[23−24]。IWATA等[25]使用柔性电子皮肤触觉传感器覆盖WENDY机器人的全身,其肩和臂部空间分辨率为20 mm,可识别人机交互的触觉信息。日本本田株式会社2011年发布的“ASIMO2011”机器人综合了视觉和触觉的物体识别技术,可进行细致作业。日本福岛核电站发生大地震后,日本政府委托本田公司着力为他们已有的ASIMO机器人研制电子皮肤触觉传感器,以使其能够更好地感知辐射严重区域的周围环境。

图2 触觉感知辅助的机械臂
电子皮肤可用于机器人全身包括肩部、肘关节、膝关节等部位,由于这些关节部位的表面形状和尺寸在机器人工作过程中易发生变形,故要求覆盖在其表面的电子皮肤需要具有高的柔性和弹性以适形并保证正常工作。近些年,有关柔弹性的电子皮肤触觉传感器的研究取得了较大进展。在柔性化方面,郭晓辉 等[26]利用聚酰亚胺为柔性基体,以质量分数为8%的炭黑填充硅橡胶作为传感器的弹性电介质,以有机硅导电银胶和金属膜作为上、下柔性极板,设计了一种可用于机器人敏感皮肤的全柔性电容式触觉传感器阵列,可以实现真正意义上的全触觉、大面积触觉感知;CHENG等[27]利用光刻和模具固化成型制作工艺制备了一种以聚二甲基硅氧烷(PDMS)为主要结构材料、导电聚合物作为传感单元、可以高度扭转的触觉传感器阵列,其扭转角度可达到70°而不破坏整体结构。在弹性化方面,应变式触觉传感器拉伸率可达1 000%[28−29]甚至更高。相比之下,压力测量的电子皮肤的弹性化更具挑战性。虽然在平面状态或拉伸率不变条件下,可延展柔性电子皮肤弹性化研究已取得一定进展,拉伸性能可达到100%[30]甚至更高,但仍难以实现三维表面下的高拉伸性能。CODY等[19]发现作为人体体表最富柔弹性的手腕部位的皮肤能够在手腕弯曲时经受最大20.4%的拉伸率,机器人及医疗器械对于电子皮肤拉伸率的要求一般达到20%;要想实现人类手腕部位的拉伸,电子皮肤弹性范围内可承受最大拉伸率应该在30%左右。目前有关能够贴合于三维静/动态表面同时完成压力感知的高柔弹性电子皮肤的研究报道较少。
2 机器人可延展的柔性电子皮肤研究进展
2.1 电子皮肤常用材料及其力学行为
电子皮肤触觉传感器作为电子元器件的一种,通常采用以下2种材料[31]:1) 无机半导体材料,如硅(Si),III-V族和II-VI族化合物等,在拉伸、弯曲等变形条件下容易发生脆断,断裂极限应变约为1%[32];2) 金属材料及其化合物,如银(Ag)、铜(Cu)、氧化铟锡(ITO)等。PASHLEY[33]的研究结果表明自由金属薄膜在拉伸至约1%应变时发生断裂失效。铜铝合金在不同温度下的应力−应变曲线[34]如图3所示。这些常用的电子元器件材料都不能直接整合于弹性基底上制备柔弹性设备,限制了电子器件整体的可拉伸性。
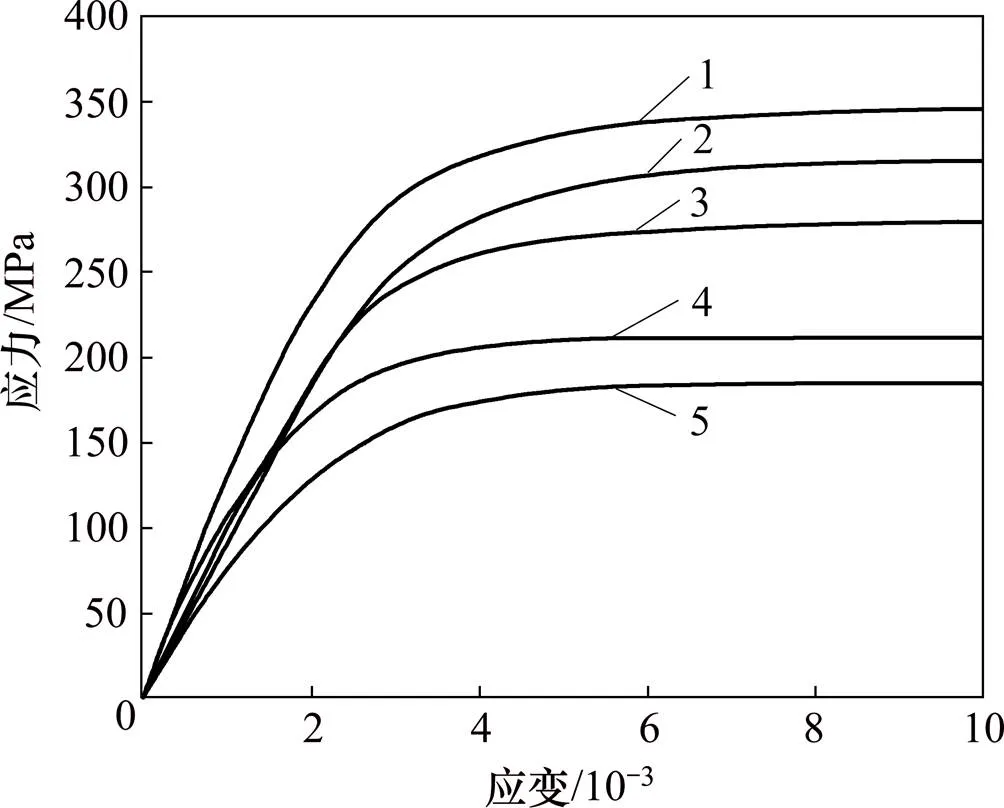
温度/℃:1—23.8;2—100.0;3—200.0;4—300.0;5—350.0。
2.2 基于柔性基板的二维纳米级膜或纳米带的可延展性
由于弯曲应变随着厚度呈线性减小,所以,任何材料在足够薄的情况下都是柔性的,如纳米级厚度的带、导线或薄膜均具有柔性。ROGERS等[35]发现厚度为100 nm的带材在弯曲到曲率半径为1 cm时峰值应变仅为5×10−6,即使安装在厚度为20 mm的塑料板上,类似弯曲半径处的应变(约0.1%)仍远低于断裂极限应变(约1%)[32]。
相对于自由金属薄膜的断裂极限而言,附在柔性基板上的金属薄膜的断裂极限要高得多[36−37],这是因为柔性基板抑制了金属导体的变形[38]。HOMMEL等[39−40]通过实验发现贴附在聚酰亚胺薄膜上的铜箔可承受2%的应变;MACIONCZYK等[41]将220 nm厚的铜铝薄膜附着在聚酰亚胺柔性基板上,发现铜铝薄膜可承受5%以上的应变,此时微裂纹开始在薄膜中形成,且随着应变增大而增大,铜铝薄膜可承受20%的应变而不发生断裂。不同平均粒径的铜铝薄膜附在柔性基板上的应力−应变曲线如图4所示。
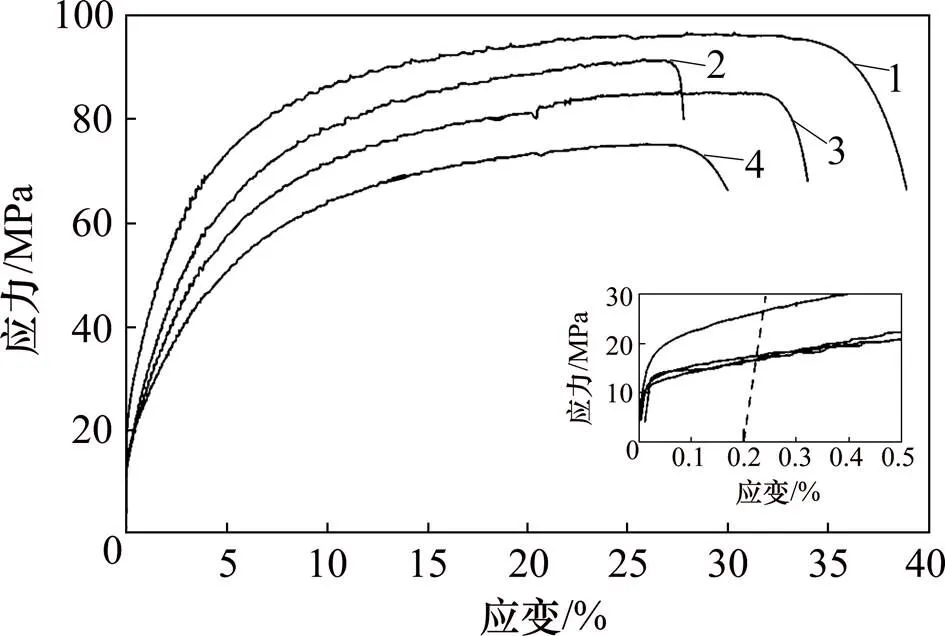
平均粒径/μm:1—11;2—84;3—307;4—928。
XIANG等[42]发现金属膜的断裂应变对它们与基底的黏附性具有敏感性。结合良好的铜薄膜拉伸至10%应变和黏合不良的铜薄膜拉伸至6%应变如图5所示。XIANG等[42]将100 nm厚的铜薄膜结合到聚合物基材上,发现良好结合的铜薄膜可承受高达10%的应变而不会出现明显的裂纹(见图5(a)),该类铜薄膜可承受高达30%的应变而不出现连续微裂纹;而黏合不良的铜薄膜在约2%的应变下形成通道裂纹(见图5(b))。
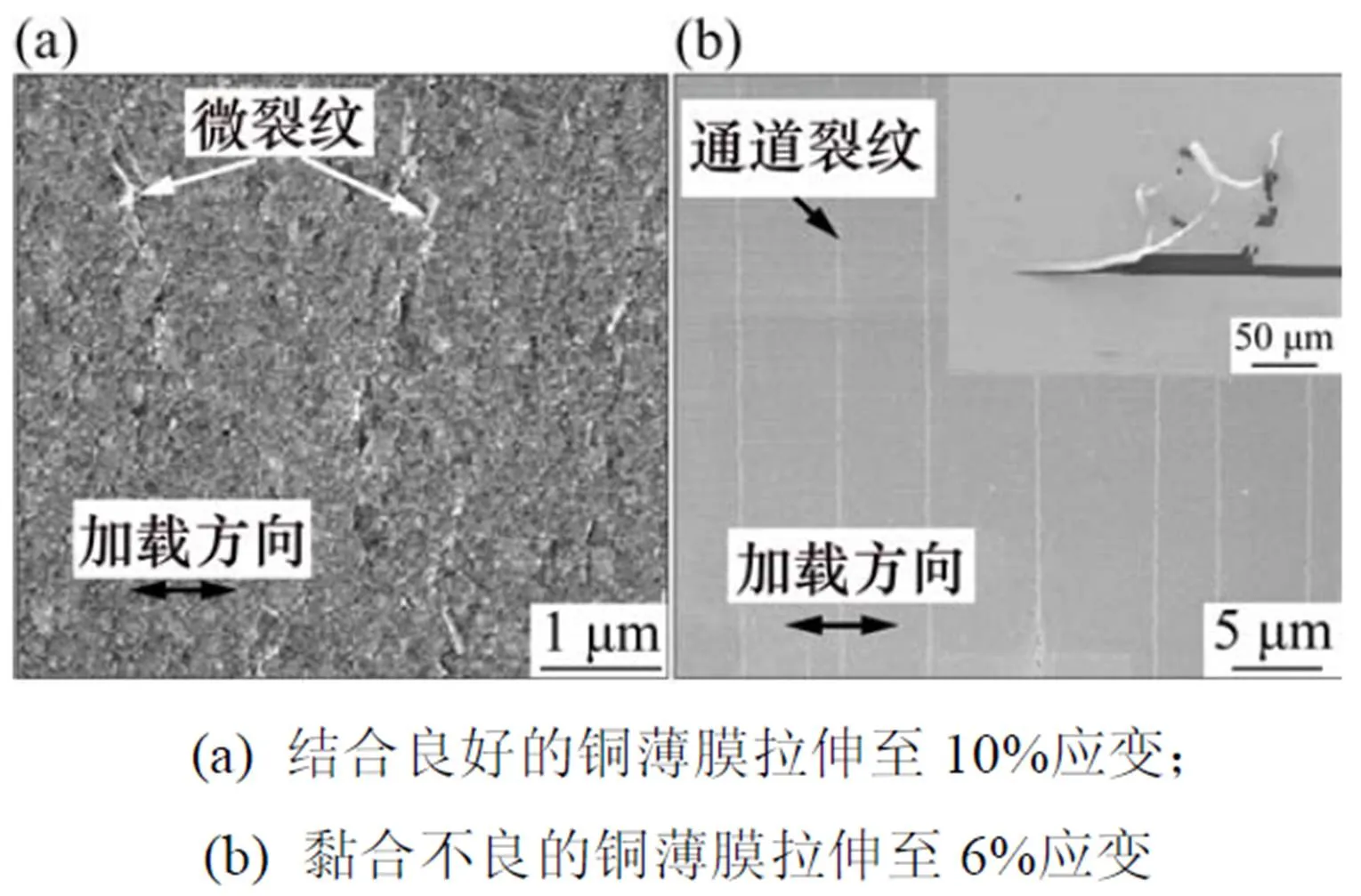
图5 铜薄膜拉伸至不同应变水平
PARK等[32]分析了基于柔性基板的硅薄带在弯曲应变下的3种不同破坏模式即裂纹、滑移和层间分离,发现其与硅薄带的厚度有关。硅薄带裂纹失效模式的SEM图像如图6所示。
2.3 基于力学的薄膜−基板结构和导电元件的结构设计
为提高电子皮肤的柔性和弹性,研究者除探索材料性能外,还利用基于力学的结构设计来改变电子皮肤中无机材料的受力情况,从而提高整体的可延展性。KHANG等[43]制备了一种由微米级周期性波状几何结构的次微米单晶分子组成的硅薄膜,通过将条带状硅薄膜转移印刷到受预拉伸的PDMS(聚二甲基硅氧烷)弹性基底上,释放基体所受的预拉伸变形,产生具有屈曲结构的硅薄膜,该硅薄膜可承受拉伸和压缩条件下的大应变而不损坏,使器件的延展性提高到5%~10%。波状硅薄膜制备过程如图7所示。

弯曲比/%:(a) 35.6;(b) 45.8
FEI等[44]通过电子束蒸发将100 nm厚的金薄膜沉积在不同预拉伸应变的PDMS弹性基底上,制备了多种不同非正弦形状的金薄膜屈曲结构,可承受拉伸。预应变对Au膜在PDMS上的屈曲分布的影响如图8所示。FEI等[44]的研究表明屈曲结构的形状与薄膜厚度、预拉伸应变程度和应变释放速率 有关。
KIM等[15]设计了一种具有纳米级尺寸的非共面“岛−桥”结构的导电元件,在导电元件整体发生变形时,可将应变几乎完全限制在岛与岛之间互联的桥上,当导电元件整体受20%应变时,“桥”中的应变仅约为0.05%;而“岛”的应变与“岛”和“桥”的厚度及弹性模量有关,当两者的厚度和弹性模量相等时,应变也相等,当“岛”的厚度和弹性模量比“桥”的大时,“岛”上的应变随之减小。在此基础上,KIM等[45]设计了非共面蛇形桥“岛−桥”结构,对导电元件整体施加106%的应变时,蛇形桥中的最大应变仅为0.35%。非共面“岛−桥”结构和非共面蛇形桥“岛−桥”结构如图9所示。
YING等[46]的研究突出了纳米几何设计在实现机械性能方面需求的重要性,采用金属、硅基材料等无机材料,通过基于力学的形状和结构设计制作了具有蛇形网状结构的柔、弹性导电元件,使得无机导电材料能够随着弹性基底的延展而伸长变形,但不会发生断裂等破坏。网状几何结构的电子皮肤阵列传感器如图10所示。这种设计可以将电子皮肤中的无机半导体材料结构在拉伸条件下的应变提升到10%~20%。
2.4 新型材料和结构一体化的柔弹性电子皮肤
SOMEYA等[47]基于有机半导体开发了灵活适形且面积较大的热传感器和压力传感器网络,如图11所示。通过将具有有机晶体管和压敏橡胶的塑性薄膜机械加工成独特的网状结构,使得薄膜器件长度和宽度可延伸25%,同时用于三维表面测量接触压力,如可覆盖于鸡蛋表面获得压力图像,但当其附着在载体或活动关节时,薄膜器件的弹性将消失。

图7 波状硅薄膜制备过程
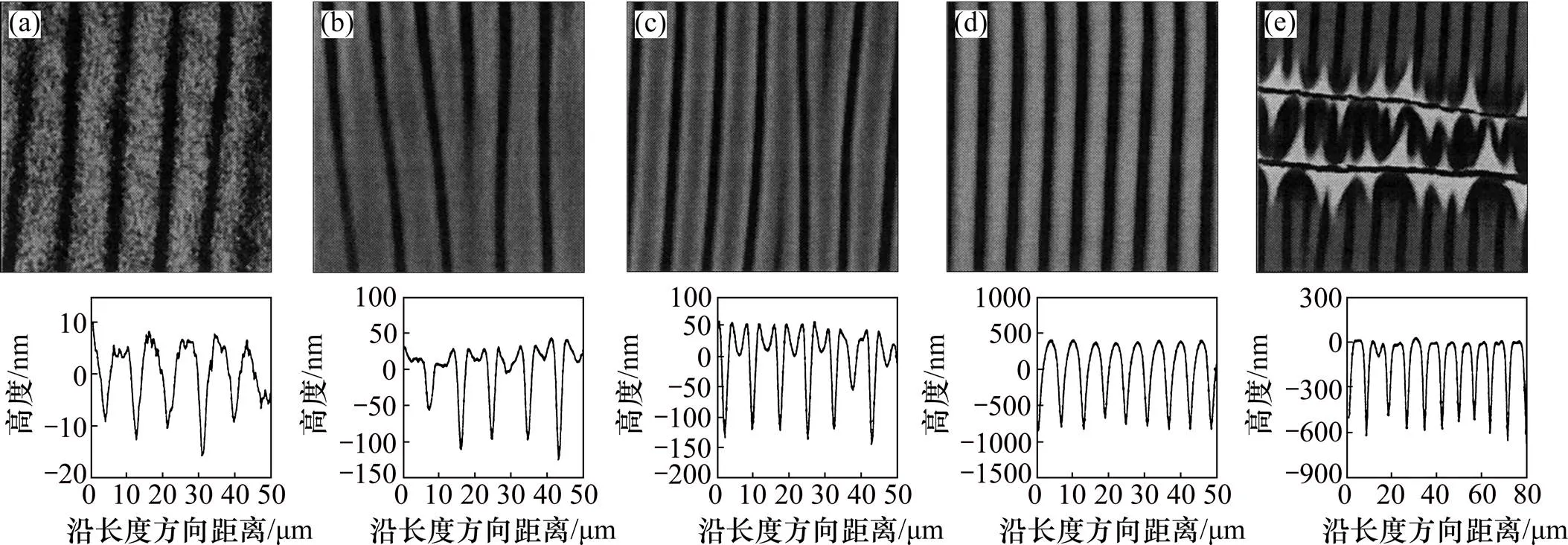
预应变/%:(a) 5; (b) 10; (c) 20; (d) 30; (e) 40

图9 “岛−桥”结构示意图

图10 网状几何结构的电子皮肤阵列传感器
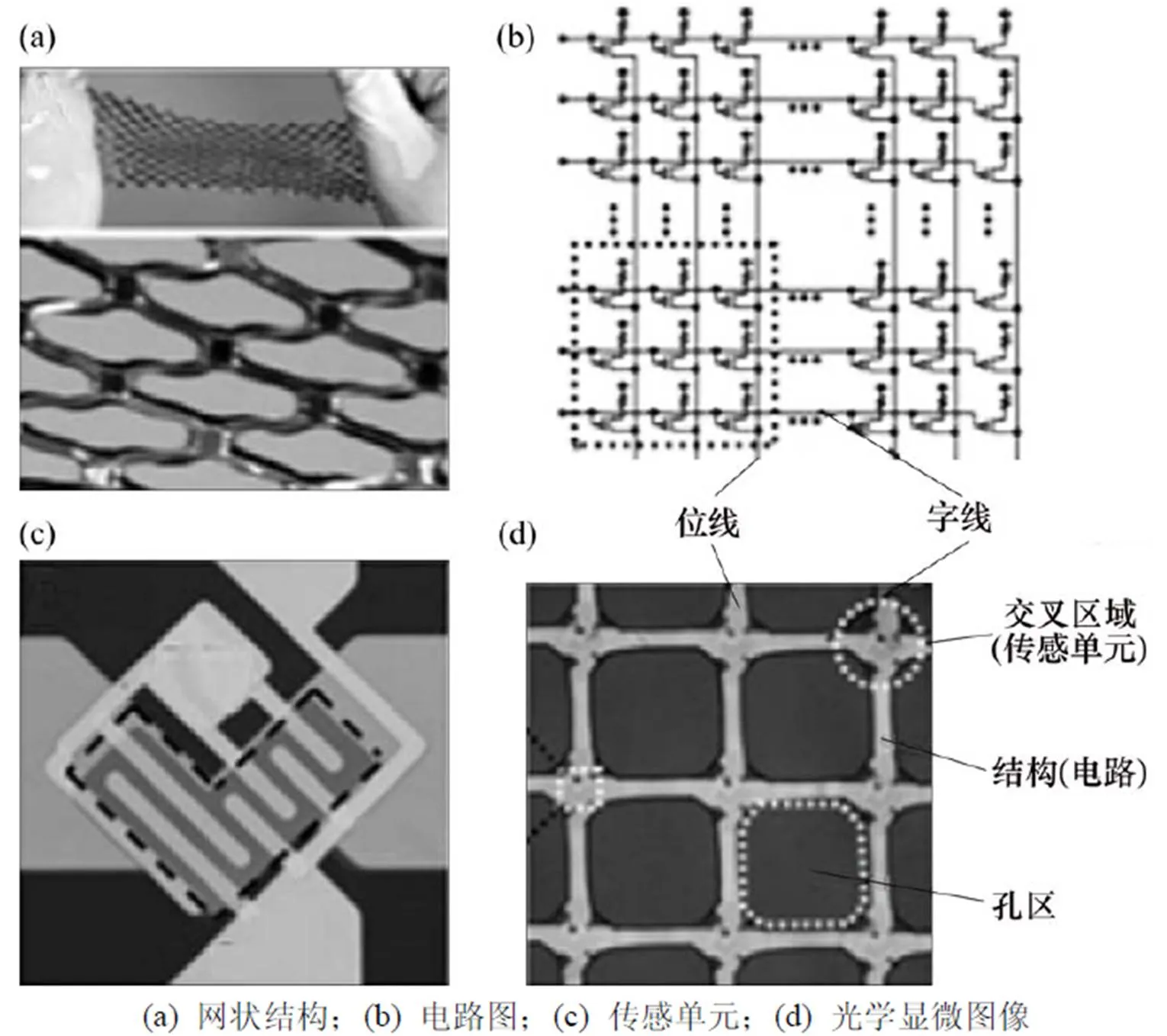
图11 一种适形的压力传感器网络
LACOUR等[48]将弹性体基材上的可伸缩电子元件需要的易碎和脆弱的器件材料放置在刚性机械隔离的子电路岛上,在室温下通过脉冲激光烧蚀在硅衬底上沉积类钻石碳(diamondlike carbon, DLC),并将该膜图案看作是长×宽为200 μm×200 μm的17×17岛阵列。图12所示为受到25%拉伸应变时的DLC岛阵列。由可拉伸金属化金互连的DLC岛列可在机械循环期间保持端对端电导率,直至应变为20%为止,可在25%的应变范围内正常工作,并保证岛状物与基材黏附,且岛状物变形仅约5%。
PARK等[49]受人类皮肤的表皮层与真皮层互锁结构的启发,利用带有微型孔的硅模具对加入固化剂碳纳米管、PDMS液态混合物进行微成型,形成互相连锁的微型拱形结构,如图13所示。这种触觉传感器灵敏度高,可感知较小的压力,但在拉伸情况下,接触压力的测量精度会受到影响。
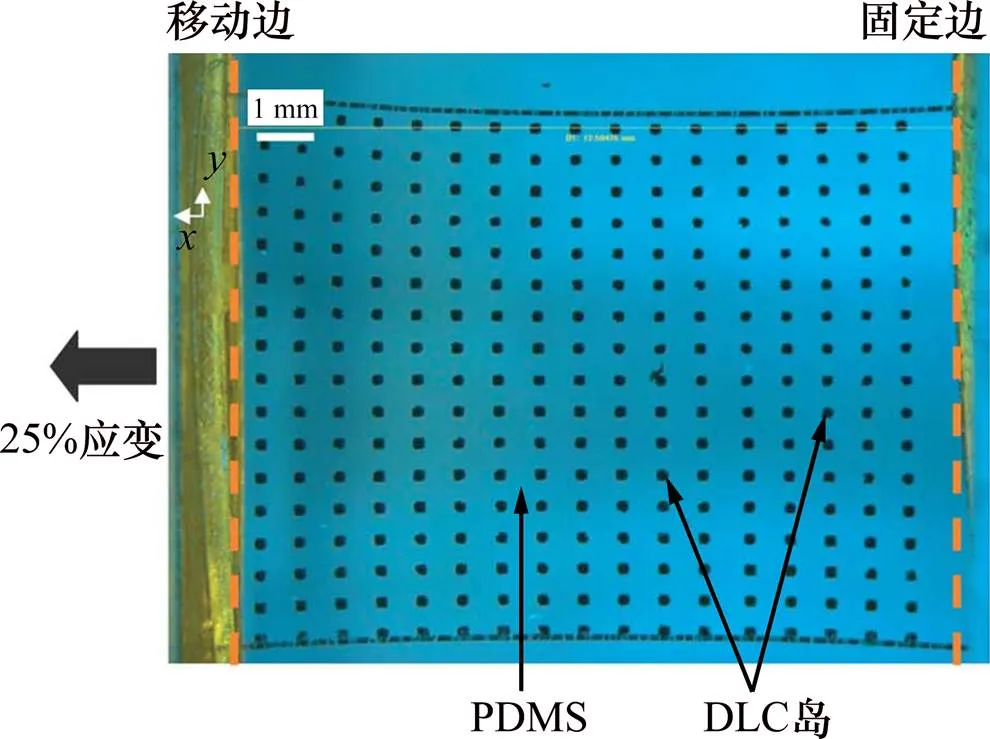
图12 受到25%拉伸应变时的DLC岛陈列
WANG等[50−51]采用新型银纳米线材料与新型结构制备柔性电子皮肤压阻式阵列触觉传感器,并提出利用基于银纳米线(AgNMs)和PDMS的复合材料制作压阻式的压力传感器阵列导线和电极从而实现阵列柔弹性的新方法,并提出了一种基于“多孔PDMS”与AgNWs/PDMS电极的新型“三明治”式压力传感器阵列结构[52],如图14所示。该结构突破了传统“三明治”结构缺乏柔弹性的限制,使阵列的弹性拉伸率达到30%,超越了人类皮肤的弹性拉伸率;0~180 kPa大范围压力感知的高柔弹性电子皮肤具有良好的可靠性和可扩展性,能够贴合载体三维复杂静/动态表面测量接触压力。同时,孟军辉[53]对基于银纳米线的弹性电极进行研究,通过PSP预拉伸弹性电极可使其在30%大拉伸率条件下的导电特性稳定性显著提高,并应用于制备新型电容式电子皮肤。该新型电子皮肤具有良好的可靠性和稳定性,可承受弯曲、拉伸、扭转、揉成团等多种变形[54]。
CHENG等[55]将毯状波结构的银纳米线附在具有螺旋形微结构预裂纹的纤维轴上作为弹性电极,形成点对点电容式矩阵,制备出一种柔性电子皮肤,如图15所示。毯状波结构的银纳米线可吸收拉伸应变,研究表明银纳米线在10%应变内不产生裂纹,该电子皮肤可在30%应变范围内正常使用,用于平面和曲面压力测绘,也可用于人体运动感知,如手掌和拇指弯曲。

图13 微型拱形结构电子皮肤触觉传感器

图14 高柔弹性的仿生电子皮肤压力传感器阵列
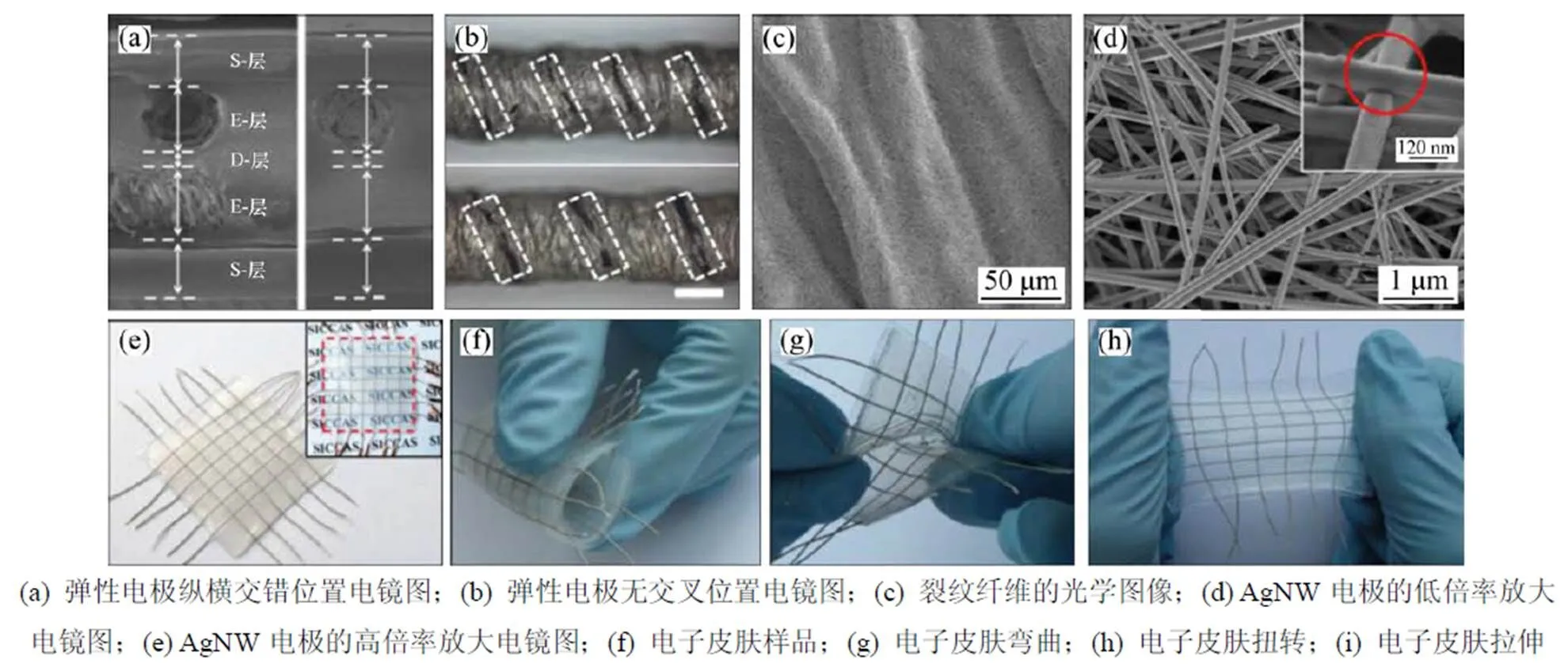
图15 弹性电极和电子皮肤性能
ZHAO等[56]设计制作了一种可在静/动态下快速响应空间接触/压力/应变分布的三明治结构(PDMS/PET/Ag//Ecoflex//Ag/PET/PDMS)的电容式柔性传感器阵列,检测限为6 Pa。蛇形电极的三明治结构传感器阵列制备如图16所示。由图16可见:传感器电极层由具有蛇形结构的银导线网、铜导线和PDMS基底组成,中间层为共聚酯介质层,保证了良好的弹性,可在70%的拉伸率和微小压力范围内正常 工作。
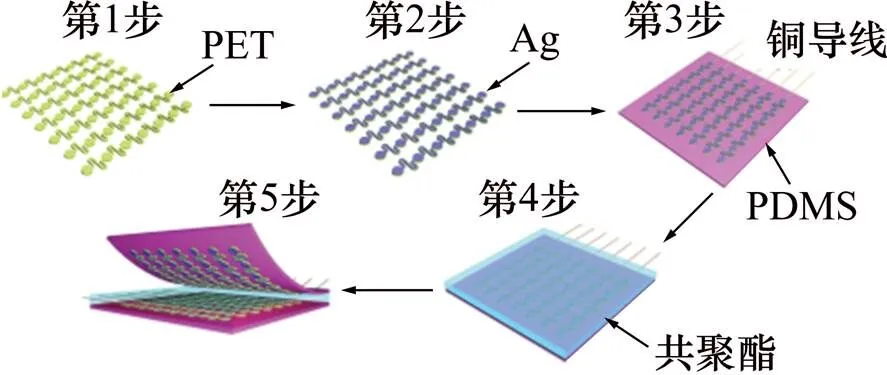
图16 蛇形电极的三明治结构传感器阵列制备
3 结论
1) 接触压力测量的电子皮肤触觉传感器阵列可用于机器人直接测量与对象或环境的接触压力的大小和方向,辅助完成环境感知、精细操作和人机交互。
2) 采用纳米级的无机材料、基于力学屈曲的结构设计和基于纳米制造等先进制备的技术新型材料与结构一体化可显著提高压力感知的柔性仿生电子皮肤触觉传感器的延展性,可望逐步满足机器人的三维复杂表面静/动态条件、活动关节部位的传感与感知对电子皮肤触觉传感器具备高柔性、高弹性和灵活可调的适形能力的要求,有利于实现机器人的智能化,便于在机器人与人类之间建立起一种新型的人机共融模式。
[1] 王国彪, 陈殿生, 陈科位, 等. 仿生机器人研究现状与发展趋势[J]. 机械工程学报, 2015, 51(13): 27−44. WANG Guobiao, CHEN Diansheng, CHEN Kewei, et al, The current research status and development strategy on biomimetic robot[J]. Journal of Mechanical Engineering, 2015, 51(13): 27−44.
[2] 尹周平, 黄永安. 柔性电子制造: 材料、器件与工艺[M]. 北京: 科学出版社, 2016: 5−17. YIN Zhouping, HUANG Yongan. Micro nano manufacturing: materials, devices and processes[M]. Beijing: Science Press, 2016: 5−17.
[3] CHARALAMBIDES A, BERGBREITER S. Rapid manufacturing of mechanoreceptive skins for slip detection in robotic grasping[J]. Advanced Materials Technologies, 2017, 2(1): 1−10.
[4] LI Tao, ZOU Jingdian, XING Fei. From dual-mode triboelectric nanogenerator to smart tactile sensor: a multiplexing design[J]. ACS nano, 2017, 2(11): 3950−3956.
[5] PEDRO S G, PEDRO M P R, OCTAVIAN P, et al. Tactile sensors for robotic applications[J]. Measurement, 2013, 46(3): 1257−1271.
[6] 曹建国, 周建辉, 缪存孝, 等. 电子皮肤触觉传感器研究进展与发展趋势[J]. 哈尔滨工业大学学报, 2017, 49(1): 1−13. CAO Jianguo, ZHOU Jianhui, MIAO Cunxiao, et al. Research progress and development strategy on tactile sensors for e-skin[J]. Journal of Harbin Institute of Technology, 2017, 49(1): 1−13.
[7] 黄振龙, 张尚杰, 潘泰松, 等. 基于碳纳米材料的柔性薄膜器件研究[J]. 中国科学: 物理学, 力学, 天文学, 2016, 46(4): 044606−044615. HUANG Zhenlong, ZHANG Shangjie, PAN Taisong, et al. Flexible devices based on carbon nanotubes[J].Scientia Sinica: Physica, Mechanica & Astronomica, 2016, 46(4): 044606− 044615.
[8] 冯雪, 陆炳卫, 吴坚, 等. 可延展柔性无机微纳电子器件原理与研究进展[J]. 物理学报, 2014, 63(1): 1−18. FENG Xue, LU Bingwei, WU Jian, et al. The principle and research progress of ductile flexible inorganic micro- nanoelectronic devices[J]. Acta Physica Sinica, 2014, 63(1): 1−18.
[9] MALLORY L, HAMMOCK A C, BENJAMIN C, et al. 25th anniversary article: the evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress[J]. Advanced Materials, 2013, 25(42): 5997−6038.
[10] 黄英, 陆伟, 赵小文, 等. 用于机器人皮肤的柔性多功能触觉传感器设计与实验[J]. 机器人, 2011, 33(3): 347−353, 359. HUANG Ying, LU Wei, ZHAO Xiaowen, et al. Design and experiment of flexible multi-functional tactile sensors for robot skin[J]. Robot, 2011, 33(3): 347−353, 359.
[11] CHO C, RYUH Y. Fabrication of flexible tactile force sensor using conductive ink and silicon elastomer[J]. Sensors and Actuators A: Physical, 2016, 237(1): 72−80.
[12] YU Kijun, YAN Zheng, HAN Mengdi, et al. Inorganic semiconducting materials for flexible and stretchable electronics[J]. NPJ Flexible Electronics, 2017, 4(1): 1−14.
[13] PU Xiong, LIU Mengmeng, CHEN Xiangyu, et al. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing[J]. Science Advances, 2017, 3(5): 1−10.
[14] NGUYEN T D, HAN H S, SHIN H Y, et al. Highly sensitive flexible proximity tactile array sensor by using carbon micro coils[J]. Sensors &Actuators A: Physical, 2017, 266: 166−177.
[15] KIM D H, SONG J, CHOI W M, et al. Materials and noncoplanar mesh designs for integrated circuits with linear elastic responses to extreme mechanical deformations[J]. Proc Natl Acad Sci U S A, 2008, 105(48): 18675−18680.
[16] JANG K L, CHUNG H U, XU S, et al. Soft network composite materials with deterministic and bio-inspired designs[J]. Nature Communications, 2015, 6: 6566−6576.
[17] 黄银, 李海成, 陈颖, 等. 可延展柔性光子/电子集成器件及转印技术[J]. 中国科学: 物理学, 力学, 天文学, 2016, 46(4): 044607−044620. HUANG Yin, LI Haicheng, CHEN Yin, et al. Stretchable and flexible photonics/electronics devices and transfer printing[J]. Scientia Sinica: Physica, Mechanica & Astronomica, 2016, 46(4): 044607−044620.
[18] 黄英, 葛运建. 可连续检测三维力的人工皮肤简介[J]. 机器人技术与应用, 2011, 2: 27−28. HUANG Ying, GE Yunjian. Introduction of artificial skin for continuous detection of three-dimensional force[J]. Robot Technique and Application, 2011, 2: 27−28.
[19] CODY F W J, IDREES R, SPILIOTI D X, et al. Tactile spatial acuity is reduced by skin stretch at the human wrist[J]. Neuroscience Letters, 2010, 484(1): 71−75.
[20] BHATTACHARJEE T, JAIN A, VAISH S, et al. Tactile sensing over articulated joints with stretchable sensors[C]// World Haptics Conference (WHC). Daejeon, South Korea: IEEE, 2013: 103−108.
[21] HAO Jianlong, XIE Xiaoliang, BIAN Guibin, et al. Development and evaluation of a 7-DOF haptic interface[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 261−269.
[22] PAN Lijia, CHORTOS A, YU Guihua, et al. An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film[J]. Nature Communications, 2014, 5(1): 3002.
[23] DIFTLER M A, CULBERT C J, AMBROSE R O, et al. Evolution of the NASA/DARPA Robonaut control system[C]// IEEE International Conference on Robotics and Automation. New York, USA: IEEE, 2003: 2543−2548.
[24] DIFTLER M A, MEHLING J S, ABDALLAH M E, et al. Robonaut 2 - the first humanoid robot in space[C]// IEEE International Conference on Robotics and Automation. New York, USA: IEEE, 2010: 2178−2183.
[25] IWATA H, SUGANO S. Human-robot-contact-state identification based on tactile recognition[J]. IEEE Transactions on Industrial Electronics, 2005, 52(6): 1468−1477.
[26] 郭小辉, 黄英, 腾珂, 等. 全柔性电容式触觉传感阵列设计与实验[J]. 电子测量与仪器学报, 2015, 29(9): 1278−1285. GUO Xiaohui, HUANG Ying, TENG Ke, et al. Design and experiment of full-flexible capacitive tactile sensing array[J]. Journal of Electronic Measurement and Instrumentation, 2015, 29(9): 1278−1285.
[27] CHENG M Y, TSAO C M, LAI Y Z, et al. The development of a highly twistable tactile sensing array with stretchable helical electrodes[J]. Sensors and Actuators A: Physical, 2011, 166(2): 226−233.
[28] MUTH J T, VOGT D M, TRUBY R L, et al. Embedded 3D printing of strain sensors within highly stretchable elastomers[J]. Advanced Materials, 2014, 26(36): 6307−6312.
[29] LIU Z F, FANG S, MOURA F A, et al. Hierarchically buckled sheath-core fibers for superelastic electronics, sensors, and muscles[J]. Science, 2015, 349(6246): 400−404.
[30] LIPOMI D J, VOSGUERITCHIAN M, TEE B C, et al. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes[J]. Nature Nanotechnology, 2011, 6(12): 788−792.
[31] 汪浩鹏. 用于接触压力测量的新型高柔弹性电子皮肤研究[D]. 北京: 北京科技大学机械工程学院, 2015: 55−61. WANG Haopeng. Development of a skin-like pressure sensor array for e-skin application[D]. Beijing: University of Science & Technology Beijing. School of Mechanical Engineering, 2015: 55−61.
[32] PARK S, AHN J, FENG X, et al. Theoretical and experimental studies of bending of inorganic electronic materials on plastic substrates[J]. Advanced Functional Materials, 2010, 18(18): 2673−2684.
[33] PASHLEY D W. A study of the deformation and fracture of single-crystal gold films high strength inside an electron microscope[J]. Proceedings of the Royal Society of London, 1960, 255(1281): 218−231.
[34] BOYER H. Atlas of strain-stress curves[M]. 2nd ed. Cleveland, USA: ASM International, 2002: 519−520.
[35] ROGERS J A, SOMEYA T, HUANG Y G. Materials and mechanics for stretchable electronics[J]. Science, 2010, 327(5973): 1603−1607.
[36] KIM D H, LU N S, HUANG Y G, et al. Materials for stretchable electronics in bioinspired and biointegrated devices[J]. MRS Bulletin, 2012, 37(3): 226−235.
[37] HUANG Yin, CHEN Hang, WU Jian, et al. Controllable wrinkle configurations by soft micropatterns to enhance the stretchability of Si ribbons[J]. Soft Matter, 2014, 10: 2559−2566.
[38] 王晓玲, 李豪, 王国庆. 柔性基板的几何参数对柔性电子系统延展性的影响[J]. 工程科学学报, 2015, 37(S1): 24−28. WANG Xiaoling, LI Hao, WANG Guoqing. Effect of the geometric parameters of elastomer substrates on the flexibility of stretchable electronics[J]. Chinese Journal of Engineering, 2015, 37(S1): 24−28.
[39] HOMMEL M, KRAFT O. Deformation behavior of thin copper films on deformable substrates[J]. Acta Materialia, 2001, 49(19): 3935− 3947.
[40] KRAFT O, HOMMEL M, ARZT E. X-ray diffraction as a tool to study the mechanical behaviour of thin films[J]. Materials Science and Engineering A, 2000, 288(2): 209−216.
[41] MACIONCZYK F, BRUCKNER. Tensile testing of AlCu thin films on polyimide foils[J]. Journal of Applied Physics, 1999, 86(9): 4922−4929.
[42] XIANG Yong, LI Teng, SUO Zhigang, et al. High ductility of a metal film adherent on a polymer substrate[J]. Applied Physics Letters, 2005, 87(16): 1−4.
[43] KHANG D Y, JIANG H Q, HUANG Y, et al. A stretchable form of single-crystal silicon for high-performance electronics on rubber substrates[J]. Science, 2006, 311(5758): 208−212.
[44] FEI Huiyang, JIANG Hanqing, KHANG D Y. Nonsinusoidal buckling of thin gold films on elastomeric substrates[J]. Journal of Vacuum Science & Technology A, 2009, 27(3): 9−12.
[45] KIM R H, BAE M H, KIM D G, et al. Stretchable, transparent graphene interconnects for arrays of microscale inorganic light emitting diodes on rubber substrates[J]. Nano Letters, 2011, 11(9): 3881−3886.
[46] YING Ming, BONIFAS A P, LU Nanshu, et al. Silicon nanomembranes for fingertip electronics[J]. Nanotechnology, 2016, 23(34): 344004-1−7.
[47] SOMEYA T, KATO Y, SEKITANI T, et al. Conformable, flexible, large-area networks of pressure and thermal sensors with organic transistor active matrixes[J]. Proceedings of the National Academy of Sciences of the United States of America, 2005, 102(35): 12321−12325.
[48] LACOUR S P, WAGER S, NARAYAN R J, et al. Stiff subcircuit islands of diamondlike carbon for stretchable electronics[J]. Journal of Applied Physics, 2006, 100(1): 014913−014919.
[49] PARK J, LEE Y, HONG J, et al. Tactile-direction-sensitive and stretchable electronic skins based on Human-Skin-Inspired interlocked microstructures[J]. ACS Nano, 2014, 8(12): 12020−12029.
[50] WANG Haopeng, ZHOU Debao, CAO Jianguo. Development of a stretchable conductor array with embedded metal nanowires[J]. IEEE Transactions on Nanotechnology, 2013, 12(4): 561−565.
[51] WANG Haopeng, ZHOU Debao, CAO Jianguo, et al. A skin-like pressure sensor array based on silver nanowires and conductive elastomer[C]// ASME 2013 Conference on Smart Materials, Adaptive Structures and Intelligent Systems. Snowbird, USA: ASME, 2013: 16−18.
[52] WANG Haopeng, ZHOU Debao, CAO Jianguo. Development of a skin-like tactile sensor array for curved surface[J]. IEEE Sensor Journal, 2014, 14(1): 55−61.
[53] 孟军辉. 基于银纳米线的弹性电极研究[D]. 北京: 北京科技大学机械工程学院, 2016: 27−55. MENG Junhui. Stretchable conductor based on silver nanowires[D]. Beijing: University of Science and Technology Beijing. School of Mechanical Engineering, 2016: 27−55.
[54] 王礼勇. 基于AgNWs/PDMS 的新型电容式电子皮肤研究[D]. 北京: 北京科技大学机械工程学院, 2017: 45−50. WANG Liyong. Research on new-type capacitive e-skin based on AgNWs and PDMS[D]. Beijing: University of Science and Technology Beijing. School of Mechanical Engineering, 2017: 45−50.
[55] CHENG Yin, WANG Ranran, ZHAI Haitao, et al. Stretchable electronic skin based on silver nanowire composite fiber electrodes for sensing pressure, proximity, and multidirectional strain[J]. Nanoscale, 2017, 9(11): 3834−3842.
[56] ZHAO Xiaoli, HUA Qilin, YU Ruomeng, et al. Flexible, stretchable and wearable multifunctional sensor array as artificial electronic skin for static and dynamic strain mapping[J]. Advanced Electronic Materials, 2015, 1(7): 1−7.
Research progress of flexible and elastic bionic e-skin for robot
QIU Lan1,2,3, CAO Jianguo1,2,3, ZHOU Jianhui1,2,4, JIANG Jun1,2,3, WANG Xiaolin1, MIAO Cunxiao1,3
(1. School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China; 2. Innovation Institute for Intelligent Robot, University of Science and Technology Beijing, Beijing 100083, China; 3. Institute of Artificial Intelligence, University of Science and Technology Beijing, Beijing 100083, China; 4. Qian’an College, North China University of Science and Technology, Tangshan 064400, China)
Biomimetic e-skin(electronic skin) tactile sensor is the prerequisite for realization of intelligent robot, especially for the complex three-dimensional carrier surface such as robots or the movable joints, the pressure-sensing extensible flexible elastic e-skin, which requires high flexibility, elasticity and conformity, has wide application prospects. The fracture limit strains of commonly used inorganic semiconductor materials and metal materials and their compounds are so low that they hardly meet the requirements of the stretchable soft skin. Thus, the extensible two-dimensional nano-membrane, nano-belt or one-dimensional nanowire electrodes or interconnection conductors are internationally used. The thin film-substrate based on the mechanical buckling and the structural design of the conductive element in nanometer-scale can effectively improve the stress situation of inorganic material, and its overall stretchabilityincreases significantly. The integration of new materials and structures using new manufacturing technologies such as nano-manufacturing remarkably enhance the flexibility and elasticity of stretchable soft e-skin. Bionic e-skin tactile sensors with high flexibility and high elasticity can improve the environment adaptability of robot, and is beneficial for establishing a new type of coexisting-cooperative- cognitive mode between human and robot.
robot; pressure sensing; e-skin; flexibility; flexibility and elasticity
TP212
A
1672−7207(2019)05−1065−10
10.11817/j.issn.1672−7207.2019.05.008
2018−06−07;
2018−08−07
科技部创新方法工作专项(2016IM010300);国家自然科学基金资助项目(61603035);中央高校基本科研业务费专项资金资助项目(FRF-GF-17-A5)(Project(2016IM010300) supported by Innovation Method Fund of Ministry of Science and Technology of China; Project(61603035) supported by the National Natural Science Foundation of China; Project(FRF-GF-17-A5) supported by the Fundamental Research Funds for the Central Universities)
曹建国,博士,教授,博士生导师,从事基于大数据的智能制造建模与板形质量控制、机器人仿生电子皮肤触觉传感与多模态感知、复杂机电系统检测与控制等研究;E-mail:geocao@ustb.edu.cn
(编辑 伍锦花)
猜你喜欢
人工晶体学报(2022年6期)2022-07-30
物流技术与应用(2022年5期)2022-06-17
东北大学学报(社会科学版)(2022年1期)2022-02-17
中南民族大学学报(自然科学版)(2021年5期)2021-10-22
海外星云(2021年6期)2021-10-14
文化创新比较研究(2020年7期)2021-01-13
表面工程与再制造(2019年3期)2019-09-18
无机材料学报(2019年8期)2019-09-12
汽车零部件(2019年7期)2019-08-16
红豆(2017年4期)2017-04-13