
导引头性能检测装置设计
2019-06-11 11:35纪小辉
中国测试 2019年4期
纪小辉
摘要:为实现在室内对多款导引头的目标识别、跟踪、光轴一致性、激光回波接收性能的检测,提出多目标识别方法、基于相对运动的跟踪方法和多光谱光轴一致性的检测方法,并设计一套由目标模拟器和两轴运动转台组成的检测装置。目标模拟器采用反射望远系统,可以提供不同灰度值的可见光目标、不同能级的红外目标以检测导引头的目标识别性能;转台带动导引头运动,检测导引头的跟踪性能;目标模拟器的准直系统提供光轴基准,检测导引头的多光谱光轴一致性;目标模拟器发出不同能级和角度的模拟回波激光,来检测激光回波接收性能。实际检测结果表明,可以实现对3~5个目标的识别,跟踪精度优于0.001rad,光轴一致性检测精度达到15”,可接收视场角±1°,能级1nW~10uW的激光回波信号。满足在室内对导引头性能检测的要求。
关键词:导引头性能;两轴转台;多光谱反射式准直仪;多光谱光轴一致性;目标跟踪与识别
中图分类号:TJ765.3文献标志码:A 文章编号:1674-5124(2019)04-0092-06
0引言
导弹靠雷达或其他方式的导引从发射端飞向目标,在接近目标的末端时,导引头就是导弹的“眼睛”,其作用是发现、跟踪目标,并最终引导导弹攻击目标。导引头一般具有两个以上谱段的光学系统,通过可见光或红外来发现目标,锁定目标后,触发激光测距跟踪系统对目标进行照射,接收目标的回波信号,对其进行跟踪。由此可见,对可见光或红外系统来说,要求较大的视场和目标的判别能力,完成对目标的搜索和锁定;对于激光测距跟踪系统来说,要求出射光发散角小,能量强,回波接收视场角大;对不同光谱系统的光軸一致性要求高。导引头的特性指标主要体现为目标的发现和识别能力、回波接收能力、光轴一致性等。
光轴一致性检测方法主要有大口径测量法、远距离目标测量法和激光相纸检测法;目标的发现、识别和跟踪能力检测主要有外场试验和室内半实物仿真法,以上方法都是对单个指标进行检测,本文提出一种综合检测装置,可实现对多款导引头一次安装,检测多个项目,提高检测效率。
1装置组成
装置由目标运动单元(两轴仿真转台)和目标模拟单元(模拟目标器)组成,两者处于分离状态,被测导引头安装在转台上,目标模拟器安置在导引头前方,两者光轴对齐,如图l所示。
转台给导引头提供俯仰和方位运动,模拟实际状态;模拟器给导引头提供多光谱无穷远目标,模拟实际中的打击目标。
1.1两轴仿真转台组成
转台由外环(方位)轴系、内环(俯仰)轴系两部分组成,台体设计成一个双轴uu型立式转台。双轴转台的结构如图2所示,图中的负载为各种类型的导引头,负载工装是根据导引头类型而定的支撑架。
1.2目标模拟器组成
目标器主要由准直(望远)系统、可见光模拟源、红外模拟源、激光模拟源、ccD成像单元、目标靶单元、激光衰减单元、综合控制柜组成,如图3所示。移动反射镜Ⅱ的切入切出,实现3个光谱光源之间的切换。移动反射镜I和可动衰减片的切入切出,实现对射人的激光的成像。以上的移动均由电控实现,靶标拟采用手工的方式更换。
2检测内容及原理
2.1目标的发现与识别
首先进行导引头和目标器的光轴对齐。转台带动导引头做方位运动,当目标器的出射光(可见光或红外光)进入导引头视场时,在成像面上可出现模拟目标的像,如图4所示。当像基本成像于视场中心时,即可停止转台的运动。更换目标靶,使用多目标靶板,这时在导引头成像面上出现多个灰度值不同的目标,可实现3~5个目标的识别,如图5所示,开启导引头自动搜索功能,对目标进行发现和识别,根据判断准则锁定目标。
2.2目标的跟踪
根据相对运动原理,当目标不动时,转台带动导引头运动,就相当于目标相对导引头做反向运动,为了始终将目标锁定于视场中心,导引头则做反向运动,形成对目标的跟踪。导引头的目标有两种,空中目标和对地目标,锁定目标后,其俯仰的运动范围不大,因此,这里主要采用方位跟踪检测。转台以规划角速度转动,如果被跟踪目标始终在波门或四象限器跟踪区内被锁定,从转台的输出位置信息,即可判定跟踪性能和得到跟踪精度。
2.3激光回波信号的接收
回波信号的接收主要考虑能量和接收视场,对不同距离、天气和目标时,激光的反射信号能量不同。根据模拟不同的情况,利用控制器使激光器发出不同脉宽、能量的激光来模拟回波信号,经过激光器前扩束镜扩束,照射到不同尺寸的分化板上,经准直系统后,形成最大视场为2。的回波信号。
2.4光轴一致性的检测
导引头最多有可见光成像系统光轴、红外成像系统光轴、激光发射光轴、激光接收光轴4个光轴。理论上4个光轴只有严格平行时,目标才能都成像在它们的视场中心。所以在一定误差的允许下,完成对同一个目标的瞄准,4个光轴必须要进行一致性检测。被测导引头安装在转台上,调整转台的方位和俯仰,同时对导引头支撑工装的线位移调整,使可见光系统的光轴(没有可见光系统时,使用红外系统光轴)和目标器的光轴对准,即目标器分化板的像处于可见光视场中心。点亮红外光源,记录目标器红外分化板在导引头红外系统成像面的位置(x,y),如图6所示,则可见光与红外两轴的夹角θ为
同理,导引头发射激光脉冲,经过衰减片后,成像在目标器的CCD靶面上,记录光斑位置(x,y),则可见光与激光发射系统光轴夹角可用式(1)计算,焦距换成目标器的焦距。
目标器的激光辐射源发射模拟回波脉冲,出射后被导引头接收,根据四象限器A、B、c、D象限的输出信号值,可以计算出光斑中心在四象限器上的坐标(x,y),则可见光与激光接收系统光轴夹角可用式(1)计算,焦距换成激光接收系统的焦距。
3系统设计
3.1转台的设计
由于是对多款导引头进行检测,因此转台具有结构尺寸大、运动载荷大、定位精度高、运动速度范围宽、运动角加速度高等特点。具体要求如下:
1)负载:不大于200kg(含工装);
2)安装面为1200mmx1200mm方形吊篮台面;
3)方位轴与俯仰轴的最大角加速度:100°/s2;
4)方位轴与俯仰轴的角速度:≤100°/s;
5)方位轴与俯仰轴的角位置精度:10”;
6)方位轴:可连续旋转nx360°;
7)俯仰轴:-90°~90°。
3.1.1机械台体设计
机械台体结构设计如图2所示,转台台体(不含负载和工装)的总质量约为4100kg。
外环底座、内环u型框架、左右支架和负载安装u型台面是转台的关键零件,这些零件良好的刚度是转台顺利满足精度指标要求的必要条件。为使转台正常工作,用ANSYS软件对零件进行分析,在最大载荷作用下,转台基座最大变形为0.012mm,俯仰载物台最大变形0.044mm,均满足刚度要求,如图7、图8所示。
方位轴系由底座、本体、外环主轴、两对角接触轴承和滑环组成,轴上安装有直流力矩电机、角度传感器等部件,方位轴系可连续旋转。方位轴系采用一对高精度的有预紧负载的精密角接触球轴承7028AC/DB.P4、一对高精度7216/DF.P4与一套51156/P4推力球轴承。轴承一端相对轴承座固定,另一端轴承外圈相对轴承座移动,以补偿轴系在加工引起的累积公差。该方案使滚动轴系承载能力大,连接刚度高,可达到高的回转精度。
俯仰轴系由u型框架、左右支架、左右軸、两对角接触轴承组成,左轴上安装有直流力矩电机、编码器和光电限位;右轴上安装有直流力矩电机、机械限位等部件。俯仰轴系轴承两端分别采用一对高精度7024AC/DB.P4精密角接触球轴承。在游动端采用垫片补偿轴系加工引起的累积公差,并使该端轴承也固定,以加强u型框架的摇摆刚度。该方案使外环轴系承载能力大,抗倾覆力矩能力强,连接刚度高,可达到高的回转精度。
3.1.2驱动电机选型
驱动元件设计的一项重要原始数据就是转动惯量的计算,方位轴系的转动惯量计算(负载在极限位置时)I=2444kg·m2,根据指标要求,方位运动角速率不大于100°/s,角加速度不大于100°/s2,取计算加速度为150°/s2。所需的最大驱动力矩为Mmax=6400N·m。选用680LYX260B(T)电机,该力矩电机连续堵转力矩为2000N·m,峰值堵转力矩可达10000N·m。
俯仰轴系的转动惯量计算(负载在极限位置时)为I=1220kg.m2,根据指标要求,外环角运动速率不大于100°/s,角加速度不大于100°/s2,同样取计算加速度为150du3/s2。所需的最大驱动力矩:Mmax=3195N·m。选用两台425LYXl50B(T)电机,该力矩电机连续堵转力矩为500N·m,峰值堵转力矩可达3000N·m。
3.1.3测控系统
测控系统硬件由集中控制计算机、测控柜等构成。按功能模块分为测角系统模块,数字控制系统模块、上位机输入输出系统、电机驱动控制系统、外部通信接口系统等模块组成。
测角系统选用德国海德汉公司的产品,其具体型号为ECN225(带增量信号),其系统精度可以达到±10”,最高转速为3000r/min,可见该角度编码器可满足本转台要求。双轴转台的控制系统是在Windows XP操作系统上开发的实时控制系统。为了满足控制系统严格的响应时间要求,设计上选用美国Ardence公司开发的RTX实时扩展模块。其控制伺服周期可达到1ms,具有很高的系统响应能力。
系统的所有功能都是围绕控制系统(RTX)来实现的,它是整个系统的核心。系统采用由电流环、位置环控制回路组成的多环路从属结构控制方式。通过D/A转换卡控制电机驱动器的速度输入,电机驱动器驱动电机来实现对电机的控制。转台机械台体通过角度传感器将转台位置信号,经过测角模块和数据采集卡反馈给控制程序,控制系统再采用PID及其他相应辅助算法去控制转台,这就形成了系统的位置环。位置环是系统的主反馈环,它用于保证系统的精度。系统的电流环是通过驱动器内部实现的,电流环是构成电枢电流负反馈,以减小电源电压波动的影响,提高控制力矩的线性度,同时防止功率转换电路和电机过流。
3.2目标器的设计
目标器的主要作用是给导引头提供无穷远模拟目标,因此采用准直望远系统;考虑到是多光谱系统,因此确定光路结构为离轴反射式结构。
3.2.1离轴反射式系统设计
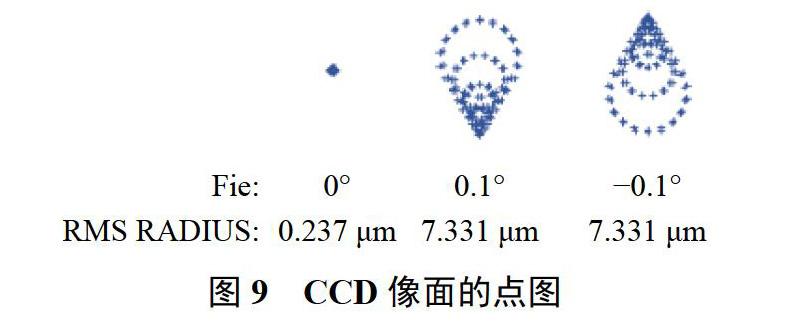
根据被测几款导引头的光学窗口布局和大小来设计目标器的孔径大小,根据要求的出射光的平行性来设计焦距,综合考虑以上因素后,确定系统通光孔径为Ф300mm,焦距为2000mm,离轴量为150mm,主镜采用双曲面镜,曲面半径R=4000mm,曲面系数为-0.9958;次镜采用平面镜,通光孔径065mm,使主光线偏转90°,如图3所示。视场采用双视场设计,对于人射激光(λ=1064nm)成像光路采用±0.1°视场,成像面为CCD像面,见图3,其成像的点列图如图9所示;最大弥散斑半径(RMS)为7.331um,其对应的视场角度为l”,而光轴平行性要求为10”,从而满足光轴一致性检测精度15”的要求。
使用此光路时,需要移动衰减片组和移动反射镜组I,来实现光路的转折。
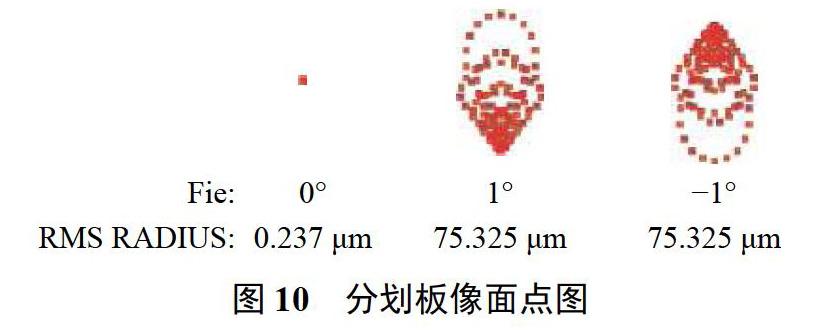
对于模拟无穷远目标的出射光路,包括可见光(λ=463nm)、红外光路(λ=10um)和模拟激光(λ=1064nm)回波信号的光路,采用±1°视场,物面为分划板,见图3,此光路成像的点图如图10所示。最大弥散斑半径(RMS)为75.325um,其对应的空间角分辨率为8”,而被测导引头的空间分辨率为200”,所以满足检测要求。
使用此光路时,可见光光路与红外光路之间的切换,需要移动可动反射镜组Ⅱ来实现。
3.2.2CCD的选型
CCD的选型主要考虑响应波长和像元尺寸及成像视场的大小,由图9可知,入射激光在成像视场±0.1°的范围内最大弥散斑半径(RMS)为7.331um,所以CCD像元大小选择4.65umx4.65um,分辨率1360x1024。
3.2.3分劃板的选型
分划板供出射光路使用,模拟可见光、红外的目标和回波激光反射物,可见光和红外靶采用暗背景亮十字(圆孔),激光靶采用全亮背景。
3.2.4光源的选型
模拟可见光无穷远目标,采用单色(绿光463nm)LED高亮背景光源,数字控制器控制光源的亮度,可采用发光面积70mmx70mm,24V/21w的光源。
模拟红外无穷远目标,主要考虑温度范围(0-125℃)、差分温度范围(-25-100℃)和辐射面积(≥4"x4"),可采用HGH公司DCN1000系列H4。
模拟被测产品激光的回波,主要考虑工作波长(1064±0.002)Ima、发散角(≤2)、激光脉宽(5~100ns连续可调)、工作频率(0.25-20Hz可调)和准直系统出口处的辐射功率(0.5nW-5uw),可采用FL-1064-S型光纤激光器的定制型。
3.2.5衰减片的选型
实现对^射激光的衰减。有效通光孔径≥Ф70mm,其中衰减片的衰减度根据人射激光能量、口径等因素综合而定。采用单导轨、螺旋传动机构,步进电机作为动力源,实现单元的切人切出。
4样机实测
使用本装置对某型号导引头特性进行检测,被测导引头具有红外搜索系统和激光跟踪系统,激光发射轴和接收轴共轴,红外系统与激光系统光轴一致性要求不大于100”。
4.1光轴一致性检测
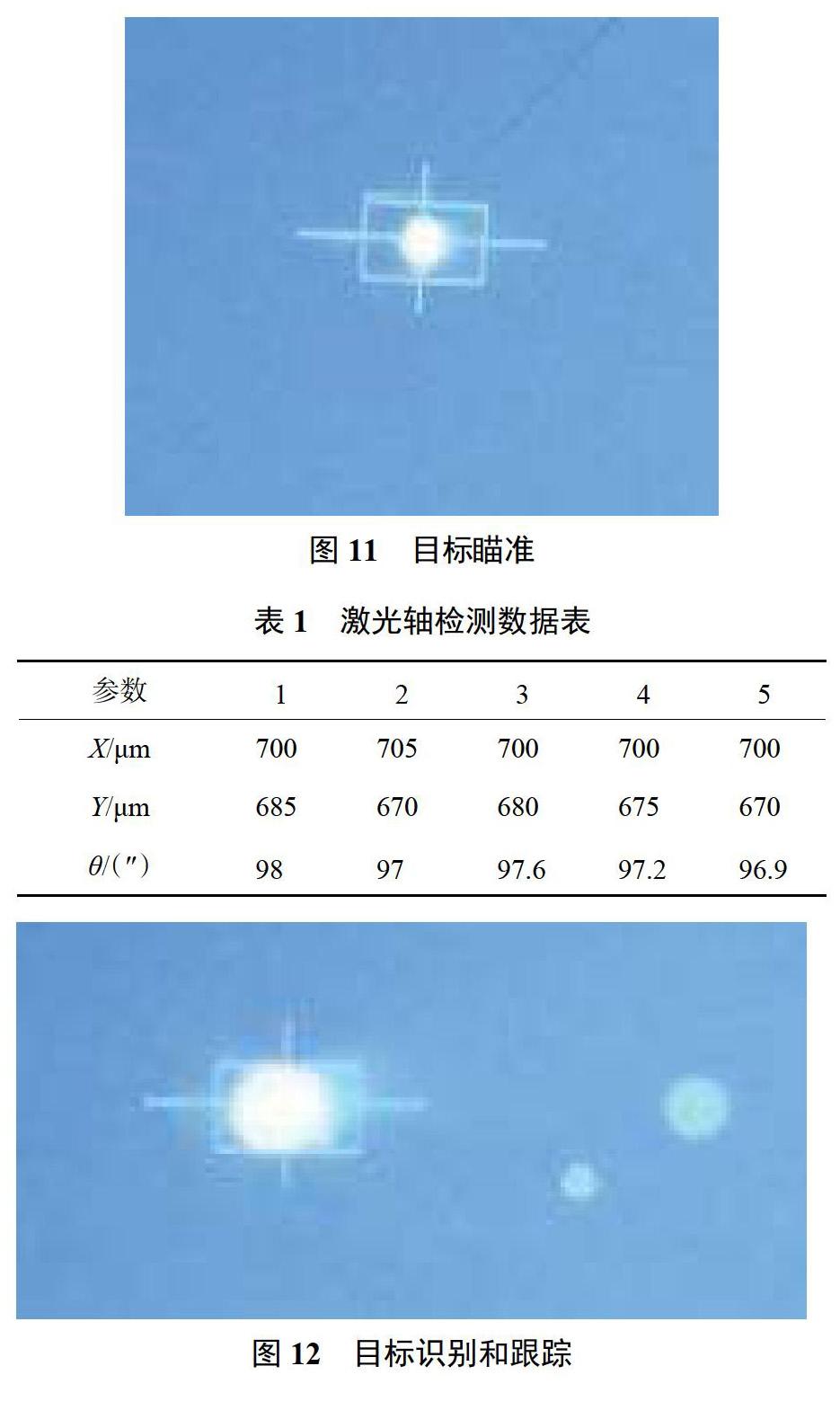
需要对红外光轴和激光发射和接收光轴进行一致性检测,打开目标器的红外点源目标,使导引头的红外搜索系统瞄准此目标,调试用监视器上瞄准目标如图11所示。此时即完成了被测导引头红外光轴和目标器基准光轴的对准。
根据在2.4节中提出的方法,计算读取图3中CCD像面激光光斑对应像面中心的位置x和y,并按照式(1)计算,焦距取目标器的焦距户f=000mm,即可完成对激光轴的检测,测试数据如表l所示。
按几何平均的方法处理检测结果,两轴的一致性为97.3”,满足指标小于100”的要求。用HGH公司的多光谱光轴一致性检测仪(4”精度)作为高一级的标准,对被测导引头进行检测,得到两轴一致性为92",则本装置的误差△Ф=5.3”。
4.2目标识别与跟踪
采用红外多目标靶进行目标识别,实测结果从调试用监视屏截屏如图12所示。同时有3个目标时,可以捕捉锁定能量级大的目标。目标的跟踪是在统一时标下,以不同速率方式进行检测,以转台输出角位置信息和导引头输出的角位置信息对比得到跟踪性能优于0.001rad。
5结束语
本文设计了模拟空间运动的两轴转台和模拟无穷远多光谱目标的目标器,实现了对多款导引头多种性能的室内检测。与传统单参数检测相比,有效提高了检测效率,与场外检测相比,有效的降低了成本。通过仿真设计,提高了设计的准确性和可行性,产品样机已进行实测,从检测结果看,达到了设计要求。后续对跟踪精度的检测还需要进一步研究。
