
基于空间拓扑关系的目标自动跟踪与位姿测量技术
2019-06-11 11:35晏晖胡丙华
中国测试 2019年4期
晏晖 胡丙华
摘要:针对试飞光电测试中目标运动轨迹姿态自动化测量的问题,提出一种基于空间拓扑关系的目标自动识别跟踪与位姿参数同步测量技术。首先通过对被测目标表面的圆形标志点密集布设、目标运动过程的图像高速采集、圆形标志点不同视角下的自动精确提取,实现目标的自动检测;之后基于多点空间拓扑关系进行同名像对的匹配,并结合双摄像机的标定参数进行前方交会测量,实现目标表面标志点的三维重建;再采用基于多点空间拓扑约束、点距判定以及坐标旋转平移变换算法的点云块配准方法,实现目标自动跟踪与运动过程的轨迹姿态参数测量。试验证明:该方法切实可行,可获得亚毫米级的定位精度和优于0.11°的定姿精度,且能够全自动处理,从而大大提升试飞测试中影像测量的数据处理效率,同时可为飞行影像数据自动化、实时化处理提供一种有效技术手段。
关键词:空间拓扑关系;目标识别跟踪;位姿测量;影像测量;点云块配准;点距判定
中图分类号:v217文献标志码:A 文章编号:1674-5124(2019)04-0009-07
0引言
影像测量技术由于直观性好、精度高等优点,在试飞测试领域发挥着重要作用,主要用于机载武器系统发射、空中加油、机翼变形、飞机起降性能、空投空降等科目中,将运动过程记录在二维影像上,为课题与试飞监控指挥人员提供直观的影像信息,同时通过图像处理、特征识别、摄影测量计算,获取运动目标的位置、姿态与速度等测量信息。但受目标识别技术的限制,该技术还未真正实现目标的实时自动化测量,大部分处在事后數据处理阶段,且需要较多的人工干预,不能满足试飞任务密集、强度大等新形势下测试科目对测量数据的实时或准实时性需求。因此,研究适合航空飞行测试影像的自动化处理技术对提升影像测量自动化程度、处理效率,进而实现实时目标视频图像测量具有重要意义。
基于影像的目标位姿测量自动化处理的关键是目标自动识别跟踪,其基础是对目标进行表面处理以提高自动识别能力,常用手段是粘贴或喷涂人工标志。圆形标志点由于其在摄影变换下保持椭圆形状不变的特性,在摄影测量,尤其是高精度摄影测量应用中的作用是举足轻重的,圆形标志点的识别和点中心计算是整个摄影测量的第1步,识别准确性和定位精度直接影响整个系统的性能。针对圆形标志点定位的研究有很多,国内成熟的技术主要有基于高斯分布拟合的标志点中心提取,利用Canny和其他图像判据提取标志点,椭圆拟合、灰度重心、灰度矩等方法,定位精度可以达到亚像素级。空间拓扑关系目前多用于GIS,是GIS空间关系理论的重要基础,目前在点云配准、影像跟踪方面也开展了一定的研究,但可查阅的用于实际工程测量的相关研究资料很少。结合飞行试验中视频成像条件、标志点成像质量及目标位姿测量原理,本文提出了基于空间拓扑关系的目标位姿自动测量技术,利用Canny算法和Zemike矩相结合的类椭圆亚像素边缘定位,结合最小二乘椭圆拟合法实现多个椭圆的自动提取定位;经影像匹配后进行前方交会测量;对不同位置得到的点云块依据其空间拓扑关系进行配准,获得目标轨迹姿态变化,即在目标自动识别跟踪的同时实现目标轨迹姿态的自动测量。利用特征标志点集的三维几何拓扑关系,空间距离关系,通过寻优可有效解决在点云配准时特征标志点群之间的搜索与匹配识别问题,提高匹配速度和精度。
1测量方案
1.1总体技术流程设计
以双站交会测量方式实现目标的位姿测量,其技术实现流程如图1所示,主要包括摄像机精确标定、密集圆形标志点的提取、影像匹配与三维测量、三维点云配准与轨迹姿态解算4部分内容。
1.2基于编码控制点的摄像机精确标定
摄像机标定的目的是获得摄像机的内外方位元素和光学畸变参数,为基于影像分析的目标运动参数测量提供基准。标定计算的核心是共线条件方程:
考虑标定效率、测量精度需求、编码点唯一性特点,以及实际试验条件,此处以编码点为控制点,采用基于光束法平差和空间后方交会原理实现摄像机内外参分步标定。
1.2.1基于光束法平差的摄像机内参与畸变系数
标定
以布设有多个编码点(坐标已知)的物体或墙面为标定控制场,进行多角度拍摄,获取编码点的序列影像,以编码点的像点坐标与物方坐标为已知条件,根据共线条件方程式(1)获得解算内外方位
根据式(2)对每张影像中提取的编码点列相应的误差方程进行整体平差,可获得精确的摄像机内参与畸变系数。
1.2.2基于后方交会的摄像机外参标定
在摄像机内参与畸变参数已知的基础上,根据共线条件方程,可得标定计算误差方程式为:
在摄像机视场内均匀布设4个以上编码点作为标定控制点,同上布设4个左右检查点,用于标定精度的实测评估。利用全站仪构建物方坐标系,并获得控制点和检查点在物方坐标系下的坐标;根据控制点的像方坐标和物方坐标,建立如式(3)的误差方程,再进行最小二乘平差获得摄像机外方位元素。
1.3密集圆形标志点的提取
1.3.1基于灰度直方图的自适应图像二值化处理
首先对图像进行灰度化处理,对原始直方图进行两次均值滤波,得到平滑的直方图,按下式规则找出峰值集合:
其中,h(l)为直方图原始值,L为灰度级数,θ为比例系数,可凭经验设置,即如果此灰度是波峰且原直方图中的值占有一定比例时,峰值被保留下来。
根据设定的阈值去除距离相近的峰值与波谷不明显的峰值以进行峰值筛选;当留下来的峰值数小于等于设置值时,以其对直方图进行区间划分。之后根据划分好的区间,利用OTSU算法求取最佳局部阈值,以此对图像进行二值化处理。在二值化基础上实现团块检测,并根据面积和周长进行非圆形标志点的筛除。
1.3.2基于Canny算法与Zemike矩相结合的类
椭圆亚像素边缘定位
对图像进行Canny边缘提取,然后采用Snake方法对边缘进行优化,滤除边缘毛刺,其通过内外力的共同作用将轮廓点收缩到图像的特征点,再以
采用最小二乘非线性优化算法对式(5)目标函数进行非线性递归搜索,即可求出椭圆中心(y0,x0),从而可以实现类椭圆中心的亚像素定位。
1.4基于多点空间拓扑关系的影像匹配
1.4.1基于视觉感受域的影像特征描述子构建
在构建区域图像描述子时,对于其中的任意一点pi可以得到一个具有同心环形结构的特征RFPi,其反映了感受域的基本模式。
对于较大的图像区域,图像内容的结构复杂性与语义多样性将随着其空间尺度的增加而增加。因此,为了对这种视觉感受域的特性进行表征,将感受域模式RFP在尺度空间上进行进一步的扩展。其基本思想是,基于每一个像素点,将采样获得多个尺度的感受域模式,使其具有递增的大小。如图2所示,位于像素pi上的多尺度感受域模式RFP可以通过以下方式获取:
依此构建的图像描述子能够对不同尺度与复杂性的图像结构进行更加综合地表征,从而得到具有更好描述能力与鲁棒性的图像描述算法。
1.4.2基于多点空间拓扑关系的点集形状提取
根据感知qj的结构四邻域中是否存在其他邻域点来对qj的结构类型进行编码,如图3所示。
此编码方式可以对点集中某点的邻域底层结构进行抽象,从而得到一些具有代表性的基础形状。
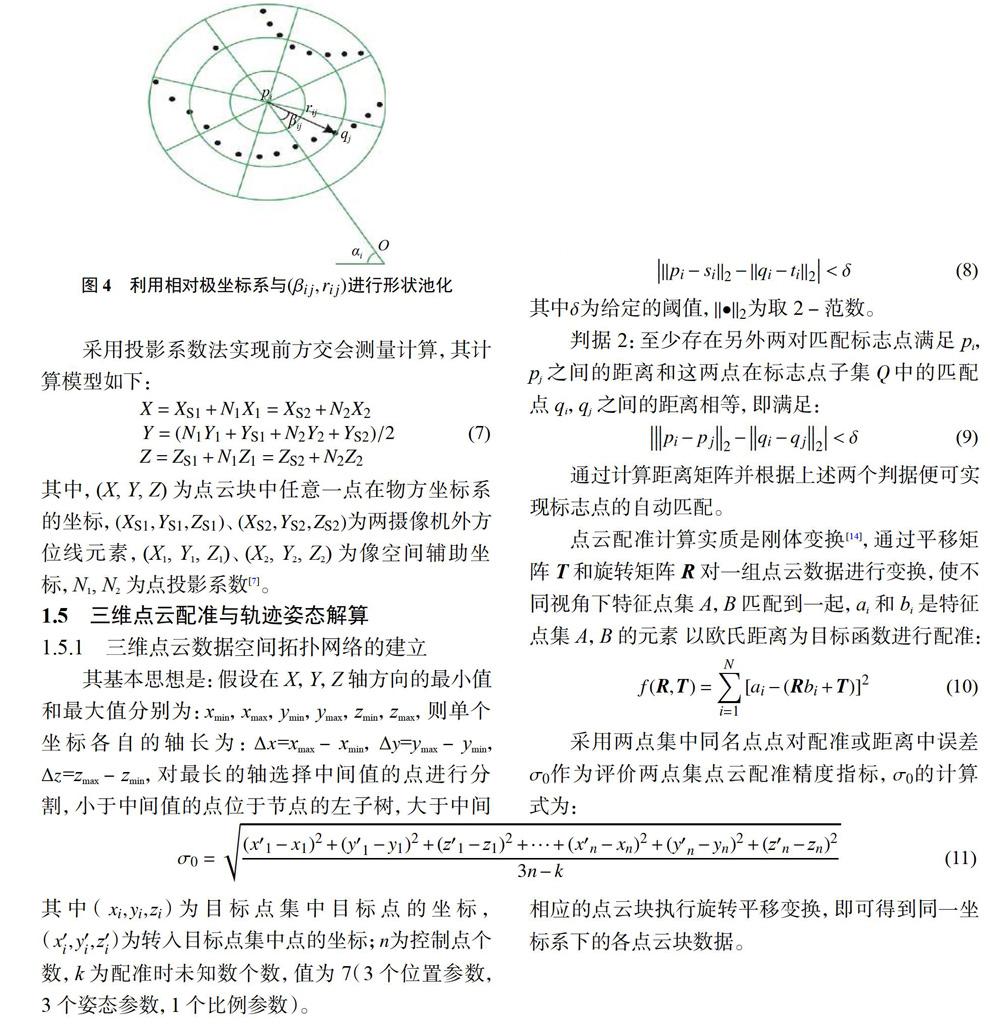
对于点pi周围局部区域的所有点qj都可以获得相应的邻域形状编码。根据构建形状直方图的思想,如果直接基于此结果对所有qj进行形状直方图累积,将会损失大量空间结构信息,因此需要进一步基于形状向量集合进行具有鲁棒性的空间池化操作,从而得到更加综合的点集局部结构形状表征。空间池化操作如图4所示。
基于局部结构的点集形状提取算法在基本形状编码与池化时利用了相对坐标系,能够更好地应对点集旋转的情况,对于点集内部的拓扑关系进行了综合表征,有利于后续影像准确匹配。
1.4.3K近邻匹配与比率测试相结合的影像匹配
描述符匹配的结果是得到两个描述符集合之间对应关系的列表。为提高匹配速度,可以在调用匹配函数之前,训练一个匹配器,建立描述符索引树,然后找到每个描述符的K近邻匹配,从而实现与查询描述符的匹配。
为了尽量减少错误的对应关系,采用离群值删除技术中比率测试与K近邻匹配相结合。在进行K近邻(KNN)匹配,根据设定的K值,对每个匹配返回K个最近邻描述符。若K=2,表示仅当第一个匹配与第二个匹配之间的距离比率足够大时(比率的阈值通常为2左右),才认为是一个正确匹配。比率测试可删除几乎所有的异常值。
1.4.4前方交会测量获得点云块解算出每块点云的R和T后,利用R和T对值的点则位于节点的右子树。以此类推,各个维循环往复。直到一个节点中的点数少于给定的最大点数,划分结束。以此建立散乱点云的空间拓扑关系。每个数据点的K邻近就可以由其所在的树节点中进行查找,从而建立每个测量点的K邻近关系。试验中需根据处理数据的特点与测试效果进行K值的预设。
1.5.2点云配准与目标轨迹姿态解算
為减少两个特征点集中非同名点对点云配准计算效率和可靠性的影响,可在配准计算前进行两点云块中标志点的匹配,以获得标志点一一对应关系。根据标志点的空间特征不变性,若(pi,qj)为标志点对,必满足如下两个判据。
判据1:pi到标志点集s中每个点的距离依次与匹配点qj到标志点集T中所有点的距离相比较,满足下式的总个数最多。
2试验验证与分析
根据前述方法需求与算法原理,利用Vc++平台实现摄像机标定计算、密集圆形标志点提取、影像匹配与三维坐标测量、三维点云配准与轨迹姿态测量、数据优化与曲线显示等功能,并在实验室进行了准确性与可靠性验证。通过在实验室架设2台高速摄像机构成测量系统平台,以布设有较密集圆形标志点的箱子作为被测目标,试验进行了2台摄像机的精确标定,目标运动过程的视频采集,目标上圆形标志点的自动识别跟踪与轨迹姿态参数解算等工作,验证了方法的有效可靠性。
2.1摄像机标定
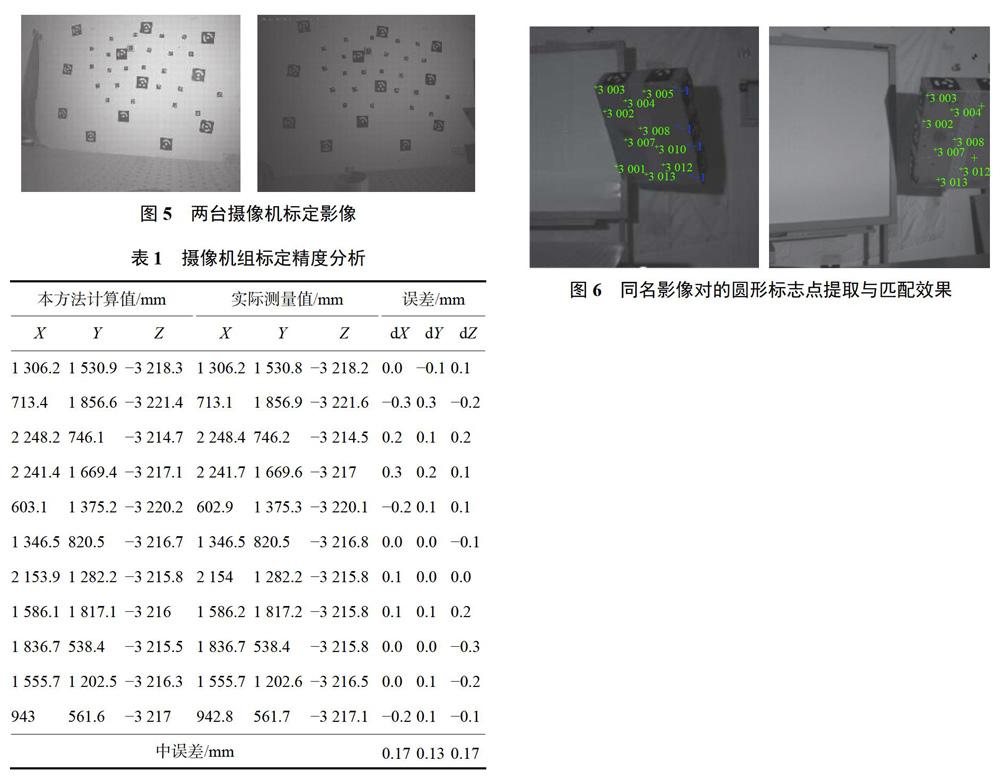
以实验室墙面上布设的坐标已知的编码点作为控制点进行摄像机的标定。首先连续变动两高速摄像机的位置与角度,获得控制点的序列影像,进行光束法平差的摄像机内参与成像畸变系数标定;然后固定两高速摄像机,获得控制点的成像,进行基于后方交会的外参标定。两台摄像机标定影像见图5。
以其中较大的编码点作为此次试验标定计算的编码控制点,经检核计算,两摄像机交会测量的标定精度如表l所示(以其中能精确识别计算的11个编码标志点进行误差统计分析)。
以编码点为控制点进行摄像机标定,有助于程序自动实现编码点提取及其与物方控制点数据的一一配对关系;由表1可以看出,试验采用摄像机标定方法取得了优于0.2mm的实际检核精度,可满足后续的目标轨迹姿态测量的精度需求。
2.2影像圆形标志点提取与匹配
在一个箱体上粘贴多个圆形小标志点,推动箱体使其做平移和翻转下落的运动,摄像机同步采集箱体运动视频影像,圆形标志点在摄像机视场中成像的个数随着运动由少变多再到变少,该方法有效扩大了测量范围,也造成了影像处理的复杂度;利用文中所述方法进行圆形标志点的提取与同名影像对的标志点匹配,其效果如图6所示。
由图可知,目标上密集圆形标志点实现了自动提取与准确匹配,说明该方法选择圆形标志作为特征点,利用成熟的canny算子粗定位和zemike亚像素级定位相结合的特征点跟踪方法可实现圆形标志点的完全自动提取;利用多点空间拓扑关系、K近邻匹配及比例测试相结合的特征匹配策略,确保影像匹配的鲁棒性与可靠性。
2.3目标轨迹与姿态测量
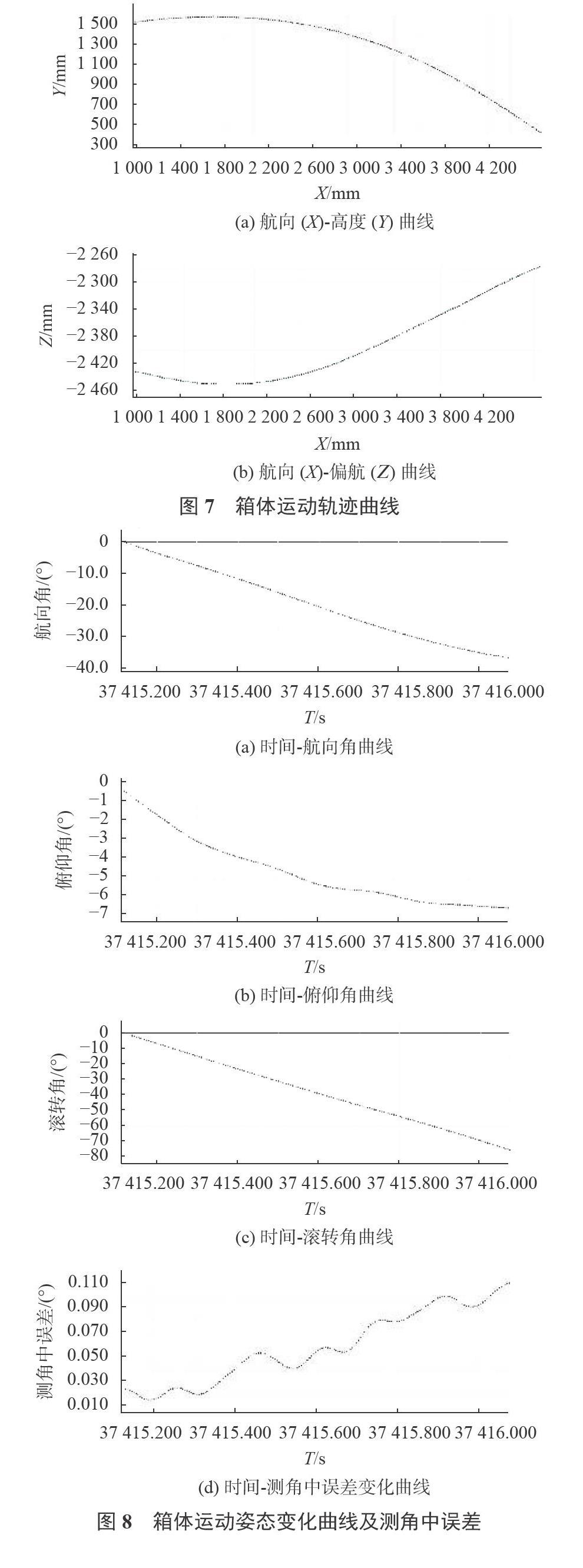
经同名影像对匹配后,依据前方交会原理实现某一时刻箱体上密集圆形标志点的三维坐标测量;然后根据不同时刻的圆形标志点构成的点云块进行配准计算,获得箱体整个运动过程的轨迹与姿态变化,其数据曲线如下图7和图8所示。
从图中可以看出,目标在运动过程中有平移、翻转、下落动作;图8显示了目标以第一帧影像状态为基准的姿态变化情况,滚转角变化很大,与视频拍摄的实际情况一致,同时,从实际测角中误差变化曲线看出,测姿误差优于0.11°,说明了该测量方法的准确性和可靠性。
3结束语
通过上述试验证明,本文提出的基于空间拓扑关系的目标轨迹姿态自动测量方法准确可靠。该方法采用圆形标志点作为跟踪对象,保证了标志点跟踪定位精度;采用密集圆形标志点布设模式避免了试飞影像测量中以往跟踪单一点会随着目标运动出现丢失的情况,保证了目标整个运动过程的稳定跟踪与测量;可实现单站或多站测量数据的全自动化处理,适用于多种型号的类似刚性结构目标的轨迹姿态测量。将相关算法进一步优化,并提高设备处理性能,可实现目标的实时跟踪测量,为试飞影像数据自动化、实时化处理提供一种有效技术手段。
