
基于FB7桥的光伏并网滑模控制策略
2019-06-11 09:13:16康家玉张晓飞王素娥陈旭阳王安琦
实验室研究与探索 2019年5期
康家玉,张晓飞,王素娥,陈旭阳,王安琦
(陕西科技大学 电气与信息工程学院,西安 710021)
0 引 言
传统光伏并网系统共模电流大,共模电流会引起电磁干扰、并网电流畸变及功率损耗,还会危及设备及人员安全[1]。针对这一问题,文献[2]中在传统三相全桥逆变器拓扑的基础上构建了FB7桥光伏逆变器拓扑:传统三相逆变器中零矢量作用的时间被作用在附加开关管S7上,此时S1~S6不工作,光伏逆变器直流侧与电网侧隔离,电流通过S7及其周围附加电路续流,有效地减小了系统共模电流[2]。但文献[2]中只对FB7的调制方案进行了分析和研究,并未对系统并网控制方法进行讨论,没有对并网电流质量进行优化。
在相关控制策略研究方面,文献[3]中应用了重复控制,系统的稳态性能得到了提高,但在动态响应过程中存在一个周期的滞后。文献[4]中采用PI控制,可以实现稳态无静差,具有良好的动态性能,但其谐波畸变率较大。文献[5]中采用有限集预测控制减少三相逆变器的共模电流,控制效果较好,但算法较复杂,计算较多。文献[6]中采用了多个PR控制器,系统复杂且计算量大,响应时间长。文献[7]中提出了一种分数阶比例积分控制,响应速度快,跟随性能好,但实现起来复杂。滑模控制是一种特殊非线性控制,具有响应速度快,抗干扰能力强等特点[8-9]。文献[10]中针对传统PID控制不能解决参数变化和非线性负载引起的谐波问题,提出自适应滑模控制来提高系统的抗干扰能力,但只研究了单相电路。因此,针对上述各种问题,本文提出了一种基于FB7光伏逆变系统双闭环滑模控制(Sliding Mode Control,SMC)策略,以期提高系统动态响应速度,改善并网电流质量和抗干扰能力;在Matlab/Simulink中搭建相应仿真模型。仿真实验结果表明,新的控制策略在实现抑制共模电流的基础上,响应速度加快,并网电流质量有所提高并有良好的抗干扰性,达到了设计要求。
1 FB7并网逆变器
1.1 FB7光伏并网系统共模模型
为了解决传统三相逆变器共模电流大的问题,本文采用FB7光伏并网逆变器拓扑结构,如图1所示。其中Cpv为寄生电容,是光伏电池板与大地之间的等效电容,也是系统产生共模电流主要原因。当系统滤波参数对称时,系统共模等效电路如图2所示。
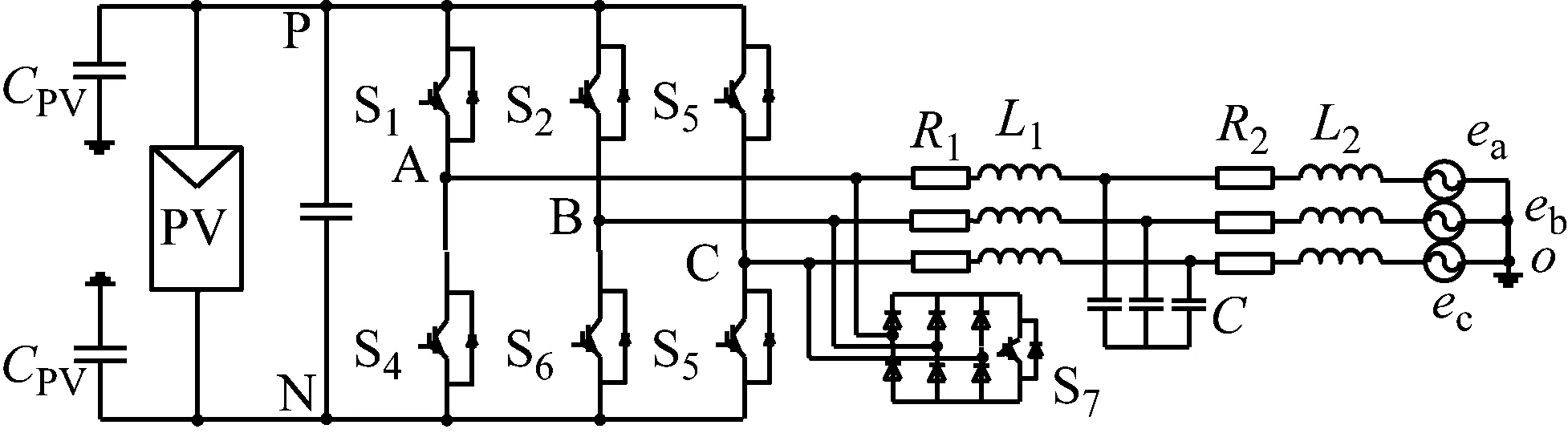
图1 FB7光伏并网系统结构图
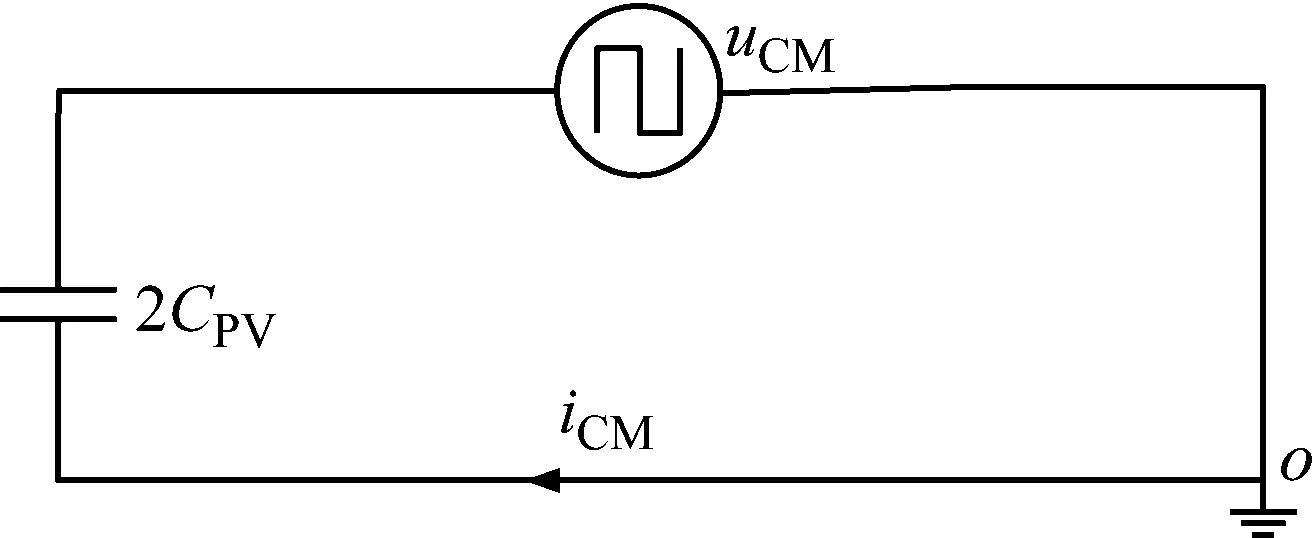
图2 系统共模等效电路
系统共模电压uCM定义为:
(1)
系统共模电流iCM定义为:
(2)
由式(2)可知,iCM的大小与uCM变化率有关,uCM变化率越大,iCM也越大。而uCM取值与逆变器不同工作模态有关。以S1、S6、S2导通,S3、S4、S5、S7关断为例分析共模电压情况。此时系统电流回路如图3中实线所示。

图3 S1、S6、S2导通时续流电流回路
此时,uAN=ud,uBN=uCN=0,由式(1)可得此时共模电压uCM=ud/3。同理可得到每种工作模态的共模电压值如表1所示。

表1 FB7光伏并网系统各工作模态下共模电压值
注:Ud为直流侧电压值,S1、S3、S5导通时记为“1”,S4、S6、S2导通时记为“0”
传统三相光伏并网逆变系统中两个零矢量对共模电压变化率影响较大,要尽可能避免零矢量对系统共模电压的影响。所以FB7桥基本工作思路为:零矢量在传统三相逆变器中工作时间被加在了附加开关管S7上。此时S1~S6不工作,电流通过附加电路续流,使光伏直流侧与电网侧实现隔离。其续流回路如图4中实线所示。

图4 S7续流电流回路
1.2 FB7光伏并网系统数学模型
本文采用图1所示的系统结构。由KVL、KCL可得FB7光伏并网系统在静止坐标下的数学模型[11]。为了解决三相静止坐标系下存在电流耦合的问题,将三相坐标系下状态方程经坐标变换解耦到dq坐标系下,解耦后的数学模型通过化简最终得到dq旋转坐标系下逆变器状态空间方程[12]:
(3)
式中:L=L1+L2;R=R1+R2。
2 控制策略设计
2.1 并网逆变系统双闭环控制方法
FB7光伏并网逆变系统双闭环控制框图如图5所示。首先将电压实测值与电压给定值700 V比较,通过电压外环控制器SMC1产生电流环的参考输入idref。电流内环控制中电流内环采用SMC2求解控制的电压信号ud、uq,同时结合有源阻尼法经反Park变换得到两相静止坐标系下的控制信号uα、uβ,然后采用适用于FB7结构的SVPWM调制方式产生脉冲信号驱动开关管。
光伏系统受外界因素(光照强度、温度等)影响会造成输出直流侧电压的波动,从而对并网逆变系统造成干扰。本文提出的双闭环控制策略中,电压外环采用准滑模控制,抗干扰能力强,响应速度快,可以有效解决直流侧电压波动的问题,满足电压外环的控制要求。电流内环采用滑模控制,可以快速跟踪给定值变化,使系统能够较快地达到稳定状态,具有良好动态性能。

图5 FB7光伏并网系统双闭环控制结构框图
2.2 电压外环准滑模控制器设计
为了减小一般滑模控制中的抖振问题[9],有学者提出了准滑模控制策略。准滑模控制策略相较于一般滑模控制策略就是将一个单一的滑模面扩展到一个一定大小的领域内,从而实现削弱系统抖振,提高控制效果的目的。
FB7电压外环准滑模控制器设计过程如下:在三相并网逆变系统中,输出有功功率Pg和无功功率Qg分别为:
(4)
坐标变换后将三相静止坐标系转换为两相旋转坐标系,电网电压参考值ugq=0,则有:
Pg=1.5ugdigd,Qg=-1.5ugdigq
(5)
在不考虑逆变系统损耗和效率问题的情况下,应有输入有功功率和输出有功功率相等:
Pin=iinvudc=Pg=1.5ugdigd
(6)
则由式(5)和(6)可得:
式中:udc为直流侧电压;iinv为流入逆变器的电流;Cdc为直流侧电容;ipv为光伏电池输出电流。根据电压外环的控制要求,将滑模切换面定义为:
S=udc-udcref=0
(9)
由于参考电压uref为常数,故上述的方程导数为:
(10)
采用指数趋近律设计外环准滑模控制,并用饱和函数sat(s)替换符号函数sgn(s),则准滑模控制的电压外环方程式为:
(11)
式中:idref为电流内环d轴电流参考值;ε为系统运动状态趋近切换面S=0的速率。
系统稳定运行的条件为Liyapunov函数的一阶导数小于零[13]。为了满足外环控制稳定的条件,设计Liyapunov函数为V=0.5S2并对其求导,可得:

-εSsat(s)-ks2
(12)
ε、k取正值时,系统稳定。ε越大,表示趋近速率越快,引起抖振也越大。在指数趋近过程中,为了保证快速趋近和控制抖振达到最好的配合,应在增大k的同时减小ε。经过多次仿真实验,本文中取ε=5,k=5 000。
2.3 电流内环改进型滑模控制器设计
电流内环的控制目标是快速、准确地跟踪电网信号,达到并网电流质量国际标准[14]。快速终端滑模控制下的系统状态可在有限时间内收敛为零,克服了一般滑模控制在线性滑模面条件下状态渐进收敛的缺点。本文采用改进的快速终端滑模控制器作为电流内环控制器,进一步降低了系统抖振并加快了系统跟踪(响应)速度。
以逆变器输出有功电流和无功电流的误差构造电流内环滑模控制的滑模切换面,即:
S1=idref-id,S2=iqref-iq
(13)
式中:idref和iqref分别为有功电流和无功电流的参考值。对式(13)求导可得:
(14)
理想的滑模控制中,控制的切换频率是无穷大的,此时系统运动状态轨迹沿着滑模面做上下垂直运动。而IGBT开关切换的频率无法达到理想情况下的无穷大,即系统的运动状态轨迹无法在理想状态,因此,本文中引入继电函数γ(s),其特性可描述为:

(15)
式中:Δ为切换函数的的滞回区间,是一正实数。滞回特征使切换控制发生在-Δ~+Δ之间,克服了开关频率不能无穷大的客观制约。为了降低了抖振并加快切换面的趋近速度和减小噪声的影响,改进后趋近率为:
(16)
将式(14)代入式(16)可得:
(17)
为了满足内环控制稳定的条件同样要求Liyapunov函数的一阶导数小于零。设计Liyapunov函数为V*=0.5S2并对其求导可得:

(18)
ε1、ε2、k1、k2取正值时,系统稳定。经过多次仿真实验,本文中取ε1=ε2=8,k1=k2=7 000。
又有ud=udcSd,uq=udcSq,ud和uq即为电流内环的控制对象。控制信号通过适应于FB7结构拓扑的SVPWM调制方式控制IGBT的控制脉冲。
3 仿真分析
为验证本文提出控制策略准确性与可行性,在Matlab/Simulink中搭建了功率为4.5 kW的FB7光伏并网逆变系统模型。光伏电池寄生电容取为50~150 μF/W[15]。仿真实验模型主要参数如下:IGBT开关频率f=20 kHz,直流侧电压udc=700 V,寄生电容Cpv=250 nF,逆变器侧滤波电感L1=5 mH,滤波电容C=8.4 μF,网侧滤波电感L2=1 mH,ε=5,k=5 000,ε1=8,ε2=8,α1=7 000,α2=7 000。
3.1 共模电流
图6~9分别为FB7桥和传统三相逆变器共模电流瞬时值波形和共模电流有效值波形。其中,FB7共模电流瞬时值小于30 mA,有效值约7 mA;传统三相逆变器瞬时值小于300 mA,有效值25 mA左右,两者均满足VDE-0126-1-1标准中规定的光伏并网系统共模电流瞬时值小于300 mA,有效值小于30 mA的要求。但FB7桥共模电流瞬时值和有效值均相较于传统光伏并网系统有明显减小。因此,本文应用FB7拓扑,有良好抑制共模电流作用。
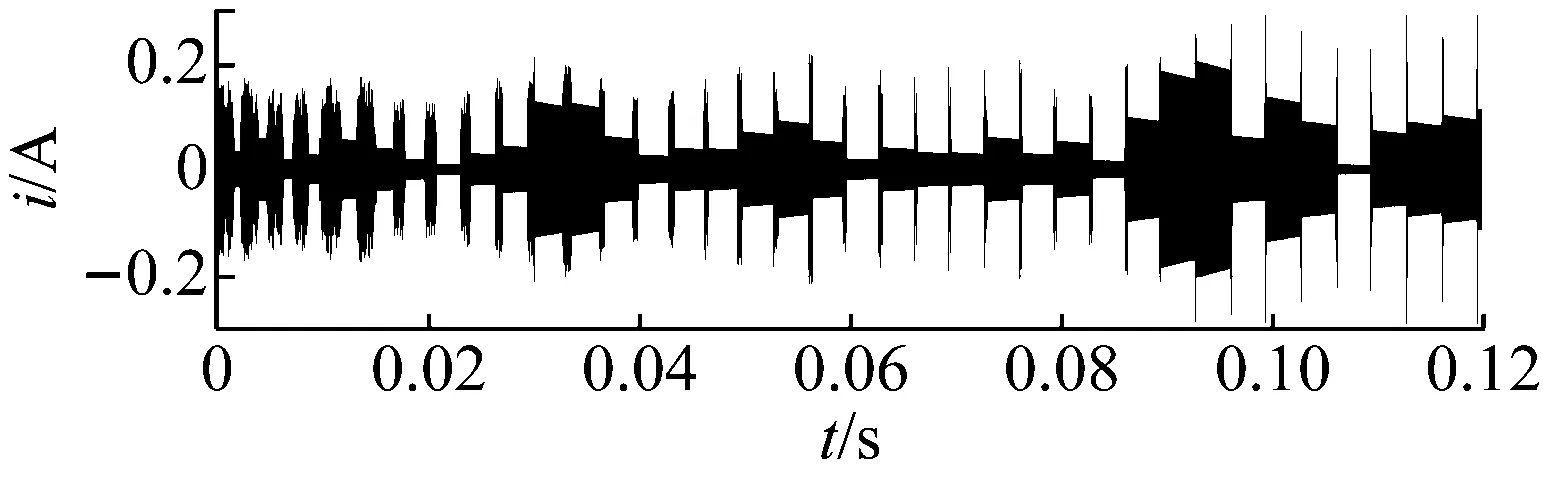
图6 传统三相逆变器共模电流瞬时值

图7 传统三相逆变器共模电流有效值

图8 FB7桥共模电流瞬时值
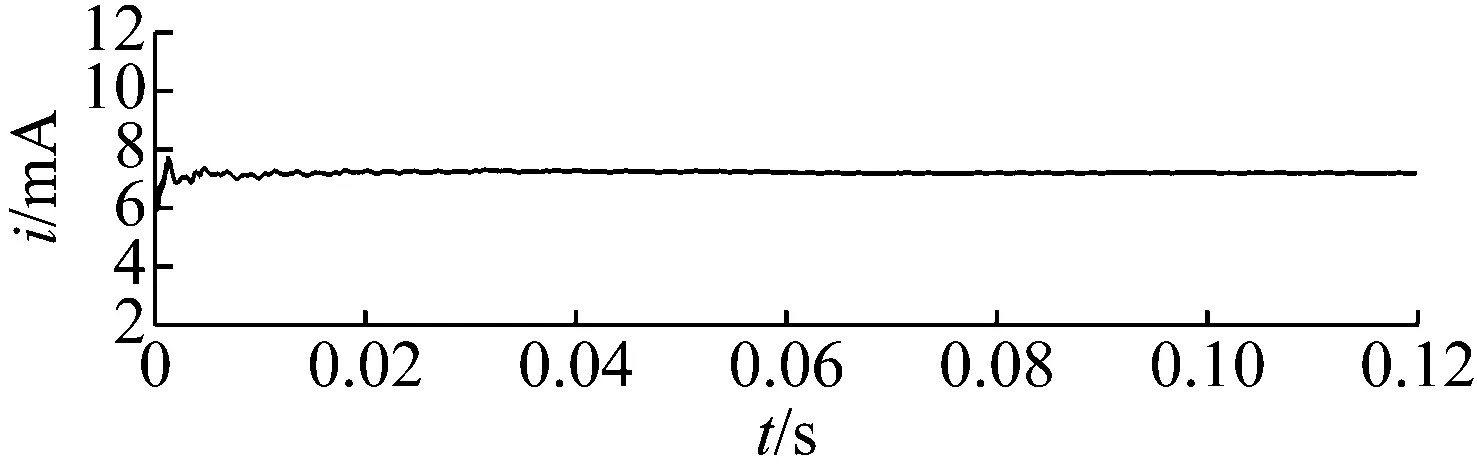
图9 FB7桥共模电流有效值
3.2 并网电流质量对比
图10和11分别为双PI控制下三相并网电流波形和双环滑模控制下三相并网电流波形。可以看到,双环滑模控制下经过半个周期系统稳定输出,且输出功率符合设计要求;双PI控制下虽然也可达到设计功率,但需要经过将近2个周期才可稳定输出。可以看到,双环滑模控制下的系统跟踪速度更快,更快地达到稳态输出。
图12和13分别为对双PI控制下三相并网电流波形和双环滑模控制下三相并网电流波形A相进行FFT分析的结果。双环滑模控制下的THD=1.16%,双PI控制下的THD=4.04%。两者虽然都满足并网电流THD小于5%的规定,但滑模控制下THD值明显更小,并网电流质量有提高。

图10 PI控制三相并网电流波形
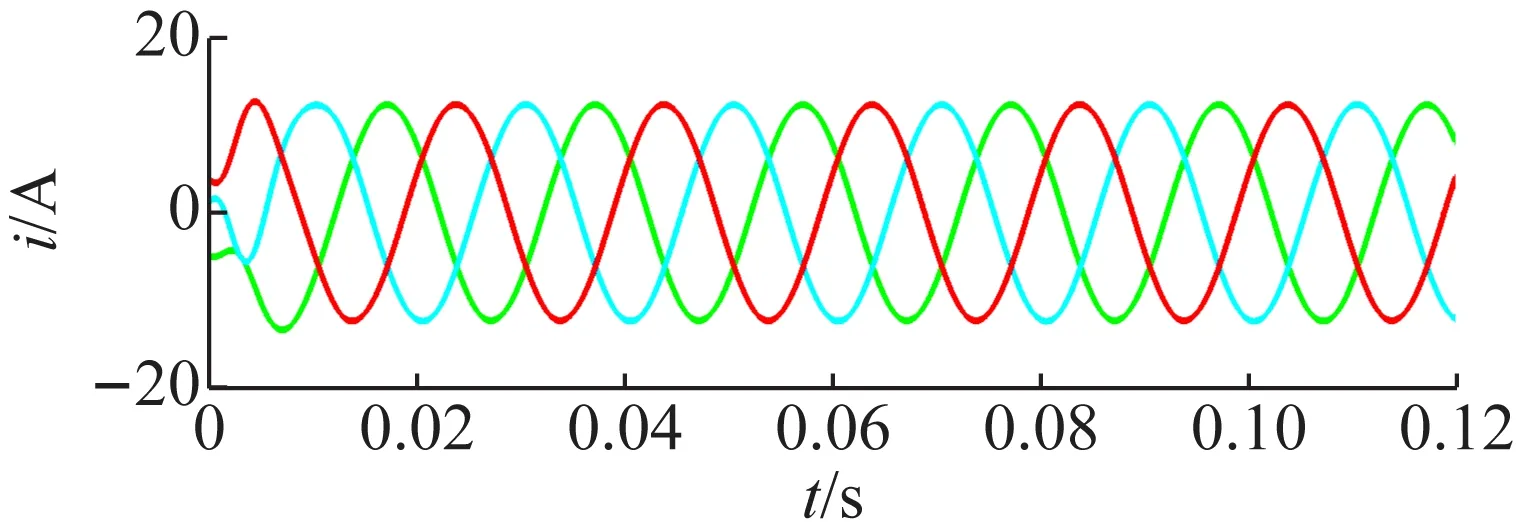
图11 滑模控制三相并网电流波形

图12 PI控制并网电流畸变率
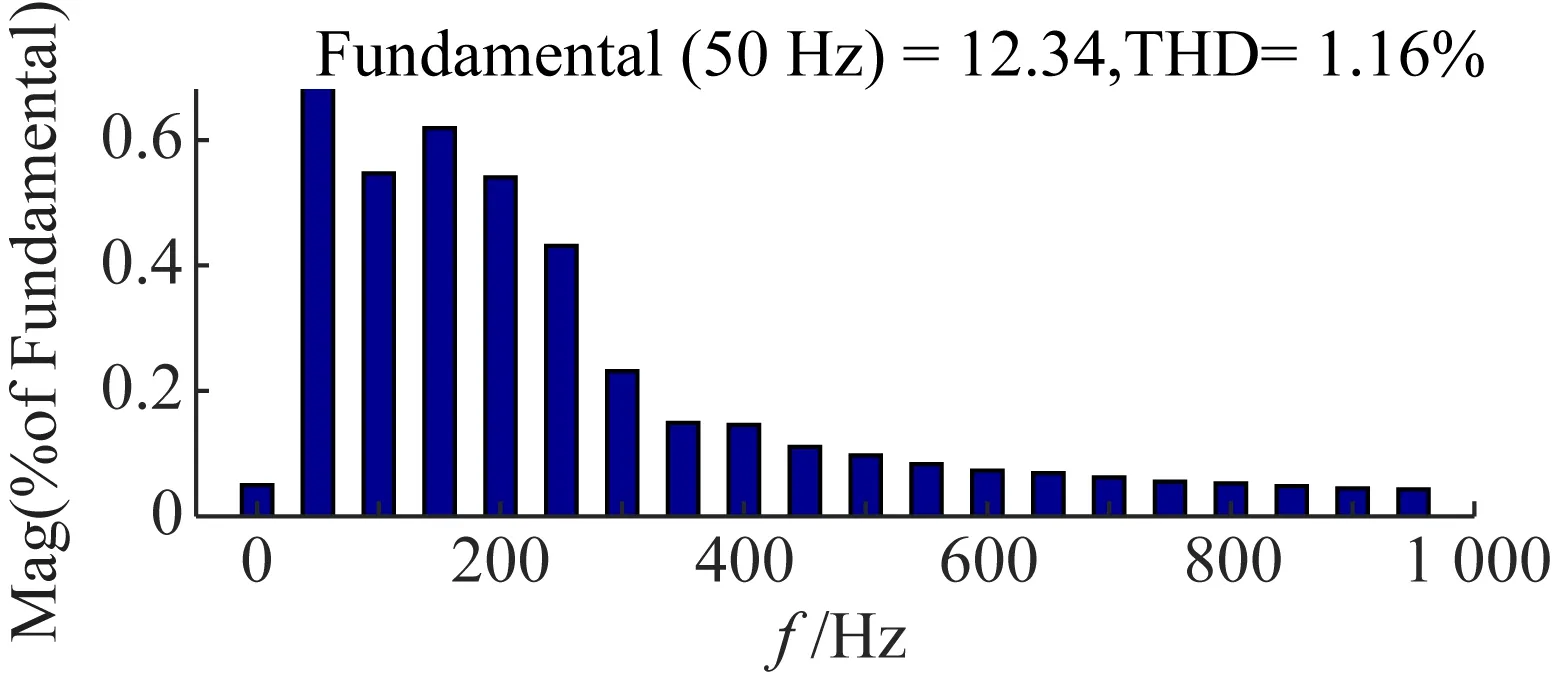
图13 滑模控制并网电流畸变率
3.3 加入干扰时对比
为检验本文提出控制策略抗干扰能力,分别在双PI控制和双环滑模控制的系统电网中加入幅值为5%电网相电压幅值的3、5、7次谐波。加入谐波干扰后并网电流波形如图14、15所示。

图14 PI控制加入3、5、7次谐波并网电流波形

图15 滑模控制加入3、5、7次谐波并网电流波形
从图14、15对比可以看出,加入一定量的谐波后,A相并网电流THD有显著增加。双环滑模控制下THD为3.95%,双PI控制下THD为8.17%。双环滑模控制抗谐波干扰能力相较于双PI控制有一定提高。
3.4 光伏系统输出变化时对比
为检验本文提出的控制策略对于光伏系统输出变化时的适应能力,分别在双环滑模控制模型和双PI控制模型仿真中改变光伏系统出力。仿真时间设置为0.2 s,在0.1 s时光伏系统输出电压变化,导致逆变器输出功率减小。
由图16、17对比可知,当光伏系统输出功率变化时,双环滑模控制下经过半个周期系统重新达到稳定;双PI控制下需要经过将近1个周期才可稳定输出。可以看到,双环滑模控制下的系统适应调整能力更强,反应时间更短,动态响应速度得到提高。

图16 光伏输出变化PI控制并网电流波形

图17 光伏输出变化滑模控制并网电流波形
4 结 语
本文分析了FB7拓扑结构的工作方式及其对共模电流的抑制能力,并提出了一种用于此拓扑的双闭环滑模控制策略。仿真结果从共模电流瞬时值和有效值、并网电流波形达到稳定状态的时间、抗谐波干扰能力、抗光伏系统输出变化等方面进行了对比。仿真结果对比可得,应用于FB7拓扑结构的双环滑模控制策略在实现对共模电流有良好抑制能力的同时,提高了系统抗干扰能力,改善了并网电流质量和动静态特性。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电子测试(2018年14期)2018-09-26 06:04:18
公民与法治(2016年24期)2016-05-17 04:21:53
电源技术(2016年2期)2016-02-27 09:05:12
化工进展(2015年6期)2015-11-13 00:27:25
中国医疗美容(2015年5期)2015-02-03 03:01:43
电测与仪表(2014年5期)2014-04-09 11:34:08
郑州大学学报(理学版)(2014年4期)2014-03-01 04:21:17
