一种提高外测数字引导准确性的系统工程方法*
2019-06-06 07:03朱丹,秦刚
遥测遥控 2019年2期
朱 丹,秦 刚
一种提高外测数字引导准确性的系统工程方法*
朱 丹,秦 刚
(中国人民解放军91550部队 大连 116023)
在飞行器试验过程中,中心机需要实时向测控设备发送数字引导信息,使测控设备能够及时捕获目标并稳定跟踪。简单介绍目前外测实时数据处理中所采用的数字引导算法,通过分析影响外测设备数字引导精度的主要因素,提出一种基于轨迹融合的数据精化处理和多级组合滤波方法,可以有效地提高测控设备数字引导精度,具有较高的实际应用价值。
测控设备;外测数据处理;数字引导;轨迹融合
引 言
飞行器飞行试验过程离不开测控系统的支持,测控系统主要由各类测量、控制、数据传输、实时数据处理、通信等设备构成,其主要任务是完成对飞行器的识别、跟踪和测量,同时对飞行器实施全过程安全控制[1]。
在测控系统中对飞行器目标实施跟踪的高精度测量装备由于波束或视场范围窄,发现和捕获空中高速飞行的目标非常困难,往往需要提供一定的目标提示,通常称之为设备引导。引导有两种方式,其一为同步引导,就是把引导设备与跟踪测量设备直接连接(模拟或数字的),由引导设备驱使被引导设备与自身作相同的转动;其二为计算机引导(通常称为数字引导),是将获取的目标轨迹信息作站址坐标转换后引导各测控设备。由于计算机引导主要是信息的综合利用,无需大的投入,故在飞行器测控中一般都采取这种方式[2]。本测控系统中心计算机系统可用于产生数字引导的数据源有三类,按照选用顺序依次为外测数据、遥测数据和理论数据。本文仅针对外测数字引导信息处理方法展开分析。
1 影响外测数字引导准确性因素分析
测控设备为了实现对飞行目标的准确、稳定跟踪,要求具备较高的测量数据采样频率(通常为20Hz),同时要求中心计算机为测控设备提供飞行目标的准确位置和速度。影响测控设备外测数字引导准确性的因素主要有引导外推的初值精度和引导外推模型两个方面。
1.1 外测实时轨迹解算方法缺陷对引导外推初值精度的影响
引导外推的初值即是飞行目标的外测轨迹参数。目前外测实时数据处理基本还沿用多年来形成的较成熟可靠的传统处理模型,即测量设备数据经过简单的误差修正及合理性检择,根据测量设备精度制定测量方案选优顺序,进行飞行目标外测轨迹参数解算,然后再经过滤波平滑进一步减小误差,即得到飞行目标的外测轨迹参数,作为引导外推的初值,用于数字引导计算[3]。
1.1.1 测量方案选优
飞行器试验过程中,在航区周围布设大量测控设备,包括光学测量设备、连续波雷达、脉冲雷达和统一测控设备等。根据测量体制不同,一台或者几台设备组合可形成一个完整的测控方案。根据各个测量方案的精度、作用范围以及测控设备的可靠性等因素,事先制定一个固定的测量方案选优表,任务中根据测控设备状态对实时形成的方案进行飞行目标轨迹解算,然后按照测量方案优先顺序进行结果输出。
当高精度测量方案未形成时,较低精度的测量方案解算出的目标飞行轨迹就会输出,如果是雷达测量单站方案,还要进行滤波求速,这样得到的速度参数就会出现较大抖动。通常测控设备俯仰角大于5°时,测量数据才稳定、可靠,但是在试验任务中,为了捕捉飞行器低空飞行数据,测控设备通常在低仰角下工作,同时由于测量设备受本身状态及其使用环境等因素的影响,在任务中高精度测量方案与低精度测量方案动态切换不可避免,导致输出的外测轨迹参数在理论值附近无规则跳动,并不能真实地反映飞行器的飞行态势。
1.1.2 轨迹解算类型
根据测量体制的不同,本应用中主要有四种方案类型。① GPS测量体制:适用于GPS单台设备定位解算目标飞行轨迹参数;② AER测量体制:适用于单台雷达测量设备定位解算目标飞行轨迹参数;③ 2AE测量体制:适用于两台光学设备的交会定位解算目标飞行轨迹参数;④ 3RR’测量体制:适用于三台连续波雷达定位解算目标飞行轨迹参数。
可以看出传统方法得到的飞行目标轨迹参数来源于单一测量方案的数据[4],没有对所有测量方案信息加以综合利用,不利于提高目标飞行轨迹解算精度,进而影响了引导外推的初值精度。
1.2 引导外推模型对设备数字引导准确性的影响
由于很难获取飞行目标的运动特性并建立精确的动力方程,通常应用卡尔曼方法的稳态解形式,也称为α-β-γ滤波器,对实时解算的当前点飞行目标轨迹参数进行滤波并进行点预报[4],的取值根据测站与中心计算机的距离、计算机的运行速度和计算能力、数据传输速度等因素来具体决定。
1.2.1 滤波模型
①第1、2点轨迹不进行滤波估值,第3点按式(1)进行估值,其中为数据采样周期0.05s。
计算预测值
计算滤波估值
α-β-γ滤波估值经验参数选取:=0.33,=1.3173,=2.6287。滤波收敛时间大约需要1s~2s,因此在2s内,滤波值不输出。
1.2.2 预报模型
本应用的外推模型较简单,即假设飞行目标作匀加速运动,采用固定增益的滤波方法进行点预报。

由于飞行器在每个飞行阶段的运动特性复杂,很难准确描述,所以在预报过程中就引入了较大的模型误差,并且这种误差随着外推时间的增加会不断地被放大。
2 提高外测引导准确性的方法探讨
2.1 基于融合算法的外测轨迹精化方法
本文并不是从技术角度来提高精度,而是运用系统工程方法,选择运算量较小、程序控制简单、算法效率高的轨迹融合方法,通过提高解算目标轨迹精度,来提高引导外推初值的准确性[5]。
2.1.1 轨迹融合的条件
在某个测量时段的某一点,至少形成两个有效测量方案才能进行轨迹融合处理。
若要剔除“连续异常值”的测量方案,第一次融合后要进行数据检择,再对余下测量方案进行再次轨迹融合,所以要求某个测量时段的某一点,至少要形成三个有效测量方案才能进行轨迹融合处理,否则不做融合处理[5]。
2.1.2 测量方案分类原则
测控系统中所有测控设备精度是不同的,通常分为高、中、低精度三类。轨迹融合要求将相同精度测量方案的数据进行融合,有效提高轨迹解算精度,所以在轨迹参数融合之前必须进行测量方案分类。测量方案分类不宜过细,否则会导致有效测量方案少而无法进行数据融合,而分类过粗又会降低数据融合精度,失去数据融合的意义。
实际应用中测量方案精度分三类:①高精度,包括GPS方案、3RR’多站方案;②中精度,如2AE光测交汇方案;③低精度,如AER雷达单站方案。
2.1.3 轨迹融合算法
假设时刻,有条解算出来的轨迹参数参与融合处理,可以按照式(5)进行加权融合,得到时刻的融合轨迹[6]:
可以看出,噪声较大的轨迹具有较小的权重,而噪声较小的轨迹具有较大的权重,这样得到的融合轨迹既能真实地反映飞行器的飞行态势,又能最大限度抑制每条轨迹的噪声干扰[8]。
2.2 滤波预报方法改进
在试验中目标跟踪丢失较频繁或目标机动性较大时,单一滤波器难以同时满足快速收敛和滤波精度,本文采用多级组合滤波器,将多个不同收敛速度和滤波精度的α-β-γ滤波器根据一定的准则组合起来,达到既快速收敛、又能获得较高滤波精度的目的。
根据飞行目标运动和跟踪的先验信息,以及任务的跟踪要求,选取组合滤波器的级数。首先根据目标机动情况和设备测量精度,确定第1级滤波参数,保证快速收敛;然后根据跟踪任务的精度要求,确定最高级滤波器参数。通过仿真构造了级组合滤波器F1~F,它们能够适应任务中的机动变化、异常观测、目标丢失后重新捕获等各种情况下的目标跟踪。
在目标跟踪开始阶段,采用快速收敛的F1滤波器,收敛后,根据机动检测切换滤波器;如果跟踪异常或重新捕获目标,则从F1重新开始启动;如此通过机动检测与切换,构建成一个级组合滤波器。工作流程见图1。
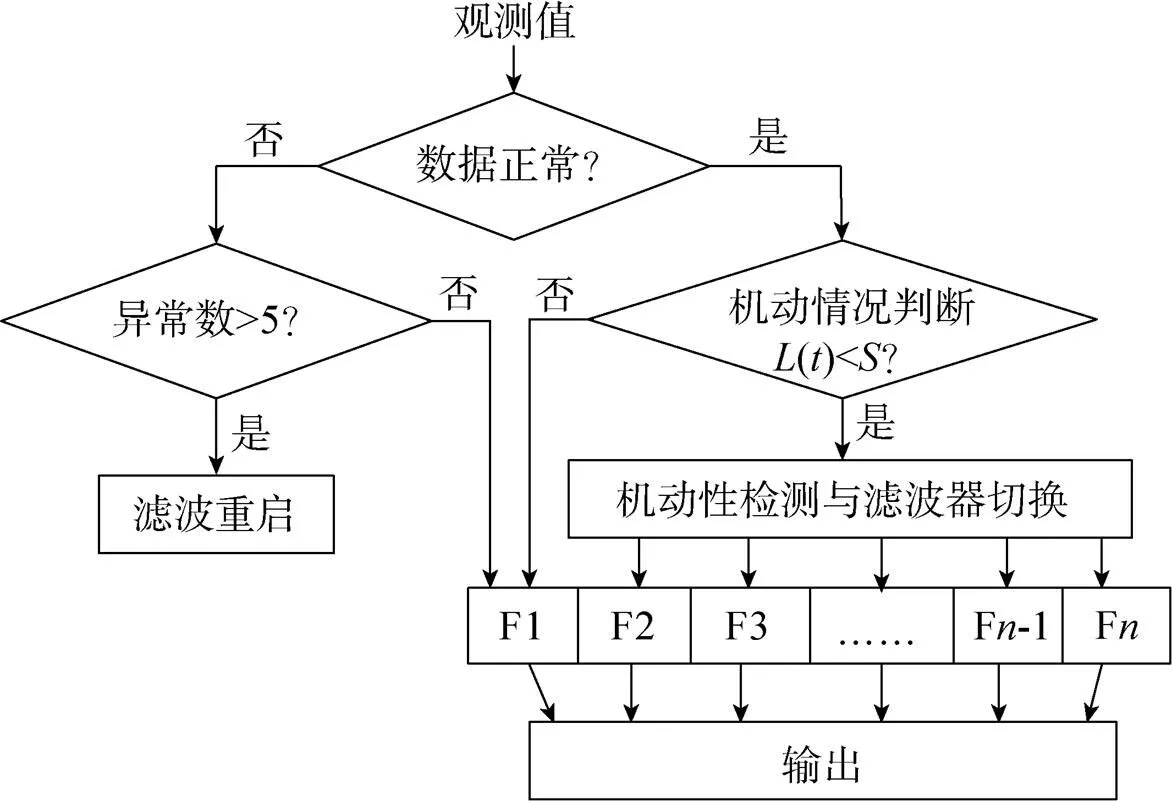
图1 组合滤波器工作流程
3 仿真结果分析
3.1 引导数据结果比较
采用Matlab软件进行仿真计算,实时数据处理频率为20Hz,参考试验任务测量设备数据进行仿真模拟。选取飞行器发射初段90个点的设备数据,选用中等精度的测量方案(2AE)进行飞行轨迹参数解算,比较采用轨迹融合方法和组合滤波器前、后的数字引导信息,组合滤波器个数取7。
图2、图3给出了中等精度测量方案(2AE)解算出的数字引导结果。从图中可以看出,常规方法解算出的发射系数字引导参数中包含了大量噪声,经过轨迹融合及组合滤波处理后,消除了参数计算中的大部分噪声影响,有效地提高了数字引导信息的准确性;位置和速度曲线均较为平滑,很好地反映了飞行目标的飞行态势,与实际情况更为相符。可见,引入轨迹融合和组合滤波方法可以显著地提高中心计算机对测控设备的数字引导效果。
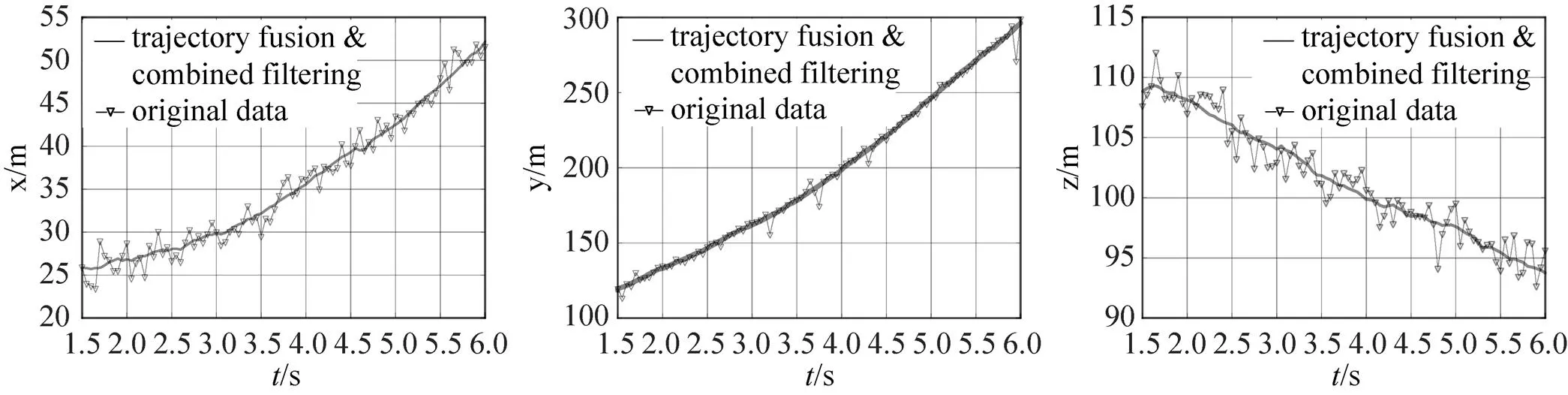
图2 位置测量结果
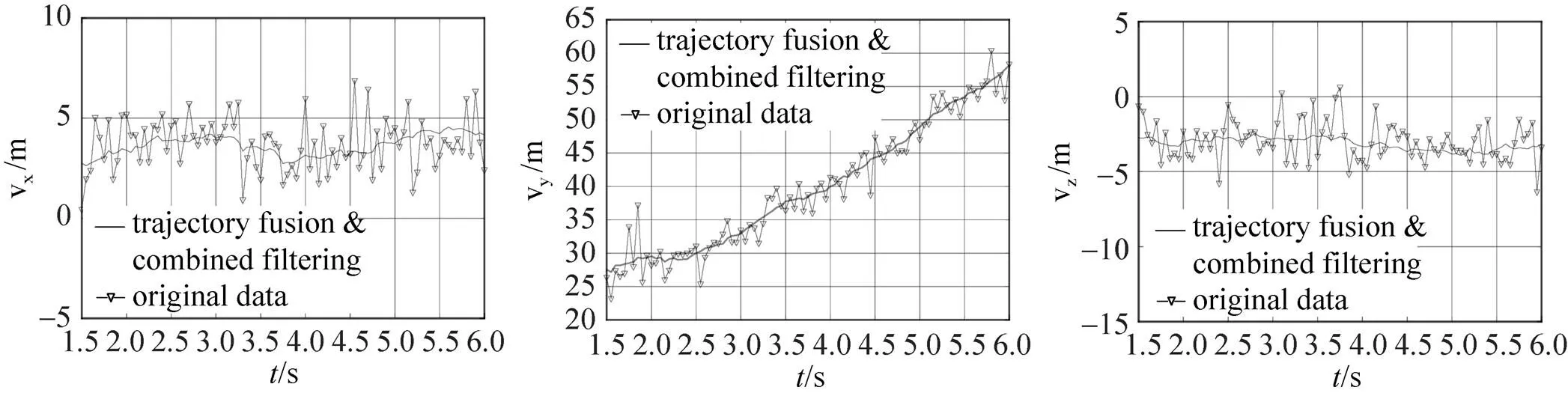
图3 速度测量结果
3.2 改进方法对软件系统实时性的影响
在实时数据处理系统中增加轨迹融合及组合滤波,必然会增加系统开销,但是却显著降低了设备异常数据对外测数字引导信息准确性的影响,对实时数据处理会有较大价值。本算法简单有效,整个过程精练紧凑,在最大计算复杂度的情况下,每周期计算时间不超过5ms,完全满足实时任务的要求。同时,随着计算机和网络技术的发展,计算机CPU处理速度、内存容量、网络传输速度均大大增强,简化的融合处理技术已经具备在实时数据处理中应用的条件[11],经过实际检验其完全能够满足测控软件实时性的要求。
4 结束语
本文提出采用系统工程方法进行实时数字引导精化处理,可以快速得到较高精度的测量设备引导数据。经过模型试算、计算方法比对以及结果分析,该方法切合实际、简单、实用,且容易实现,能够满足实时系统要求,现准备在最新研制的高可用性集群实时数据处理软件中尝试使用。
目前的测控系统为了适应飞行器试验发展的需要,已从最初仅跟踪单一目标发展到现如今具备多目标精确跟踪处理数据的能力,同时随着试、训、演结合的进一步发展,实时数据处理可以依托跟踪制导雷达直接跟踪武器系统,引导武器系统去打击目标,所以对中心计算机实时数据的精度及可靠性要求会越来越高[12]。本文提出的基于轨迹融合的实时数据处理方法能够有效地提高飞行目标轨迹解算精度,减少用于引导计算的初值误差对外推结果的影响,有效地提高了测控设备引导外推的准确性,应用前景广阔。
[1] 成求清, 李波, 余浩章, 等. 导弹测控系统总统设计原理与方法[M]. 北京: 清华大学出版社, 2014.
[2] 崔书华, 王敏, 王佳. 测速跟踪测量数据处理[M]. 北京: 国防工业出版社, 2017.
[3] 于古胜, 方建勋, 张大禹, 等. 海上靶场试验指挥控制技术[M]. 北京: 海潮出版社, 2015.
[4] 雷刚. 弹道与轨道力学基础[M]. 北京: 北京航空航天大学出版社, 2016.
[5] 郭军海, 慈颖. 飞行器实时测控信息融合体制研究[J]. 飞行器测控学报, 2007, 26(3): 57–61. GUO Junhai, CI Ying. Researches on information fusion system of spacecraft real-time TT&C[J]. Journal of Spacecraft TT&C Technology, 2007, 26(3): 57–61.
[6] 李昌玺, 周焰, 林菡. 一种弹道导弹目标时空域信息融合模型[J]. 现代防御技术, 2016, 44(5): 52–60. LI Changxi, ZHOU Yan, LIN Han. Model of temporal spatial information fusion for BM[J]. Modern Defence Technology, 2016, 44(5): 52–60.
[7] 于瑞年. 一种有效提高实时数据处理融合效果的算法探究[J]. 信息技术与信息化, 2015(8): 211–212.
[8] 李鹏. 一种基于数据融合技术的外测实时处理方法[J]. 自动化技术与应用, 2013, 32(3): 60–63. LI Peng . The realtime processing method of the trajectory based on the data fusion[J]. Techniques of Automation & Applications, 2013, 32(3): 60–63.
[9] 李冬, 孙杰. 弹道跟踪数据融合处理的快速算法[J]. 飞行器测控学报, 2015, 34(4): 368–373. LI Dong, SUN Jie. Fast algorithms for fusion processing of trajectory tracking data[J]. Journal of Spacecraft TT&C Technology, 2015, 34(4): 368–373.
[10] 段秀云, 黄瑜. 外弹道测量数据快速融合方法[J]. 四川兵工学报, 2015, 36(7): 165–168. DUAN Xiuyun, HUANG Yu. Research on method of fast fusion calculation on trajectory data[J]. Journal of Sichuan Ordnance, 2015, 36(7): 165–168.
[11] 潘建平, 王盛玺, 刘宗伟. 集群系统下多弹道实时测量数据处理的UKF算法[J]. 电子设计工程, 2016, 24(13): 61–63. PAN Jianping, WANG Shengxi, LIU Zongwei. UKF algorithm for real-time measurement of multi trajectory data processing in cluster system[J]. Electronic Design Engineering, 2016, 24(13): 61–63.
[12] 吴超, 单奇. 航迹预测技术在制导雷达数据处理中的应用[J]. 国外电子测量技术, 2013, 32(4): 35–38. WU Chao, SHAN Qi. Application of track prediction in data processing of guidance radar[J]. Foreign Electronic Measurement Technology, 2013, 32(4): 35–38.
Engineering methods to improve the accuracy of digital guidance in trajectory tracking
ZHU Dan, QIN Gang
(Unit 91550 of PLA, Dalian 116023, China)
In the process of aircraft test, the center computer needs to send digital guidance information to the TT&C equipment in real-time, so that the TT&C equipment can catch the target in time and track it stably. In this paper, the digital guidance algorithm for real time data processing of trajectory tracking is introduced, the main reasons influencing the digital guidance precision are analyzed, and the data refinement processing method based on trajectory fusion and the multi-stage combined filtering method are proposed, which can effectively improve the digital guidance accuracy for TT&C equipment and has high practical application value.
TT&C equipment; Trajectory tracking data processing; Digital guidance; Trajectory fusion
V557
A
CN11-1780(2019)02-0057-06
基金项目:国家自然科学基金(41374018)
2018-12-14
2019-01-17
朱 丹 1966年生,硕士,高级工程师,主要从事实时测控软件研制工作。
秦 刚 1985年生,本科,助理工程师,主要从事试验指挥组织管理工作。
猜你喜欢
中国船检(2020年11期)2020-11-27
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11