混合双电源系统倾转旋翼无人机的设计
2019-06-06 02:43:24杨泽夏睢辰萌
日用电器 2019年5期
程 欣 杨泽夏 睢辰萌
(河北科技大学 石家庄 050018)
引言
随着无人机技术的发展和经济建设的需要,无人机已经逐渐渗透到多个领域。当前国内无人机研究前沿领域,当属垂直起降无人机。现阶段发展较为成熟的垂直起降无人机采用复合翼构型气动布局。这种复合翼构型气动布局为常规固定翼无人机气动布局,动力系统采用“4+1”五旋翼模式,但是,提供垂直飞行动力的四旋翼在大部分时间中不工作而成为负担,增加了一定的重量和阻力。驱动旋翼一般采用锂电池供电的电动机和燃油发动机,存在质量较大、噪音较大、尾气污染的情况。这些问题严重阻碍着垂直起降无人机的技术发展和推广应用。因此,通过研究垂直起降无人机领域发展现状,结合多领域先进技术设计一款新型垂直起降无人机是非常必要的。本设计提出一种四旋翼的垂直起降无人机,四个旋翼为四旋翼模式和固定翼模式共用,在切换过程中,缓慢倾转旋翼,实现四旋翼模式到固定翼模式的过渡[3];以及混合双电源系统,将锂电池和氢燃料电池结合使用,比现在普遍使用的锂电池或发动机发电的电源更轻,几乎没有震动噪音而且环保,具有更好的控制稳定性。符合无人机未来发展趋势和需求方向,极具实用性和应用价值。
1 整体设计及分析
氢锂混合能源倾转旋翼无人机的整体结构,如图1所示。
飞行器整体包括动力系统、机翼、机身、垂平尾、控制系统五个部分组成。动力系统构型选用工字型倾转旋翼结构、机翼选用CLACK K翼型、机身采用盒式结构、垂平尾采用常规尾翼布局、控制系统采用开源飞控。
垂直起降无人机的总体布局方案采用的是工式倾转四旋翼布局如图2所示,整体结构简单,在各方面相比其他构型并不占劣势,尤其在飞行性能,装载和可控制性上更占优势。十字型倾转旋翼布局如图3所示,虽然在经性和飞行性能方面整体不错,但其控制系统比较复杂。因此在考虑满足设计要求的情况下,构型选用工字型倾转旋翼结构。
1.1 机翼平面形状的设计及分析
低速飞机的阻力主要由诱导阻力和型阻构成。机身型阻通常假定与升力无关,总阻力等于零阻与诱导阻力之和。对于机翼而言,型阻主要受翼型阻力影响,一般是随升力变化的。为了设计减阻,需要从型阻和诱导阻力两方面入手[6]。
诱导阻力取决于机翼展弦比 A 和升力载荷的展向分布形态。机翼型阻则取决于展向剖面阻力分布,其物理意义是剖面翼型摩擦阻力与压差阻力之和的平均。矩形翼与梯形翼的结合可有效减小诱导阻力[6]。机翼尺寸如图4所示。
1.2 翼型的选择
低速固定翼无人机普遍采用大展弦比、无后掠机翼,平面形状确定后,机翼的气动特性取决于翼型[6]。在选择或设计翼型时,首先根据设计要求计算得出雷诺数。

其中v是流体流动速度,μ是流体的动力粘性系数,L是物体的特征长度,其表征了流体惯性力与粘性力的比值。本设计机翼的气动力弦长1.6 m,在高空 H=0.1 km以v=15 m/s飞行时,该无人机以机翼平均气动弦长为特征长度的数为30万左右[5]。
在 Profili 翼型库中初步选取两种较常用于无人飞行器的翼型:CLARK Y和MH 115两种翼型。代入Re=30 600到Profili分析得出翼型气动特性如下图所示。
从图5可看出,按照翼型的选取原则,从原点引出两切线相切于所示两曲线,两切线斜率接近,MH 115气动特性稍优于CLARK Y,考虑制作工艺的难易程度,本设计最终选取CLARK Y翼型。从图6可看出,CLARK Y翼型在迎角3~5 °时升阻比最大,因此本设计中选用CLARK Y翼型4.5 °安装迎角。
垂平尾均采用对称翼型NACA0010,常规尾翼布置,采用较大的垂尾面积以保证航向安定性。翼型如图7所示。
2 可倾转四旋翼系统
如图8所示,可倾转四旋翼系统包括第一连接杆,第二连接杆,第一结构臂和第二结构臂;所述系统包括四个电机、四个舵机,所述第一结构臂和第二结构臂的第一端部和第二端部与电机、舵机一一对应。

图1 混合双电源系统倾转旋翼无人机

图2 工式倾转四旋翼布局

图3 十字型倾转旋翼布局
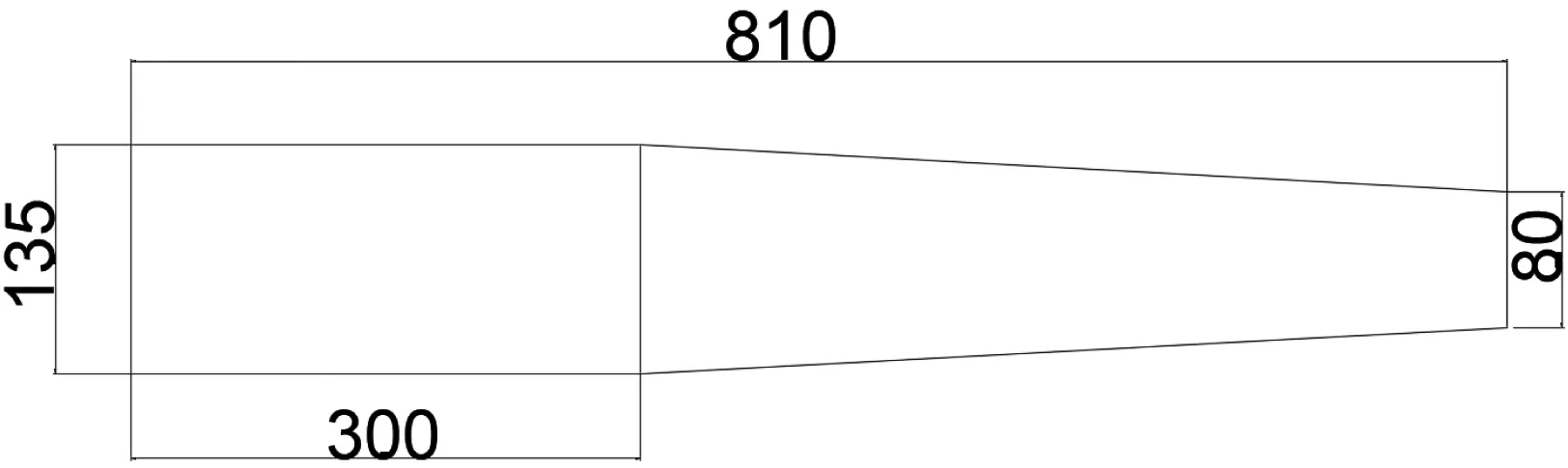
图4 机翼外形及详细尺寸
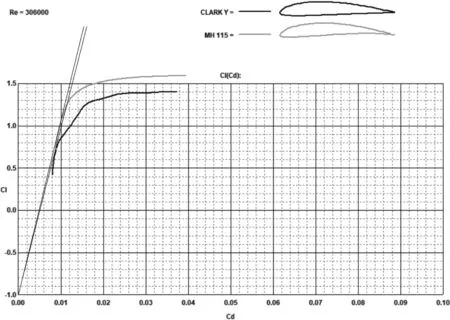
图5 CLARKY、MH 115两种翼型气动特性
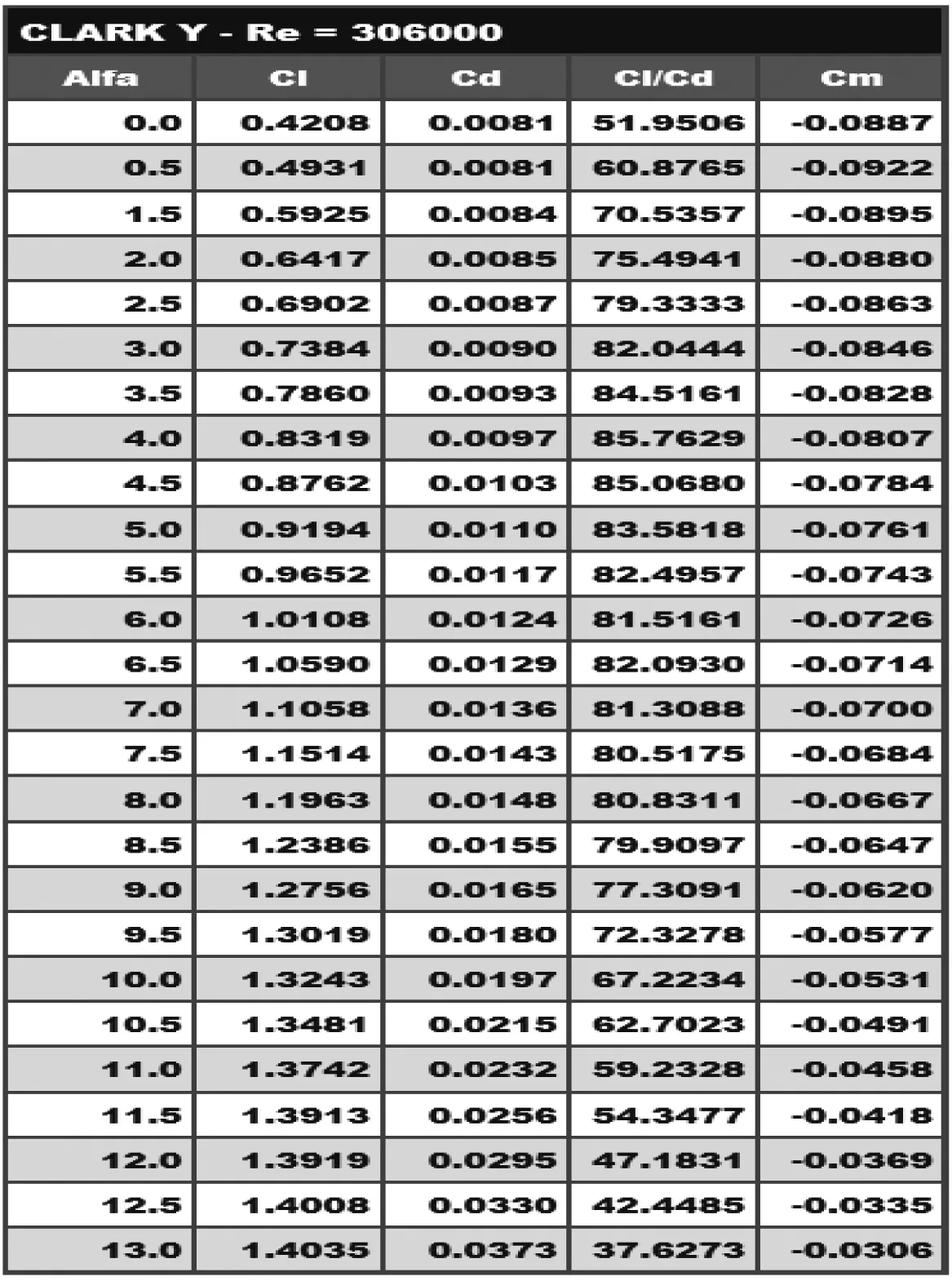
图6 CLARK Y翼型不同迎角下升阻比

图7 对称翼型NACA0010
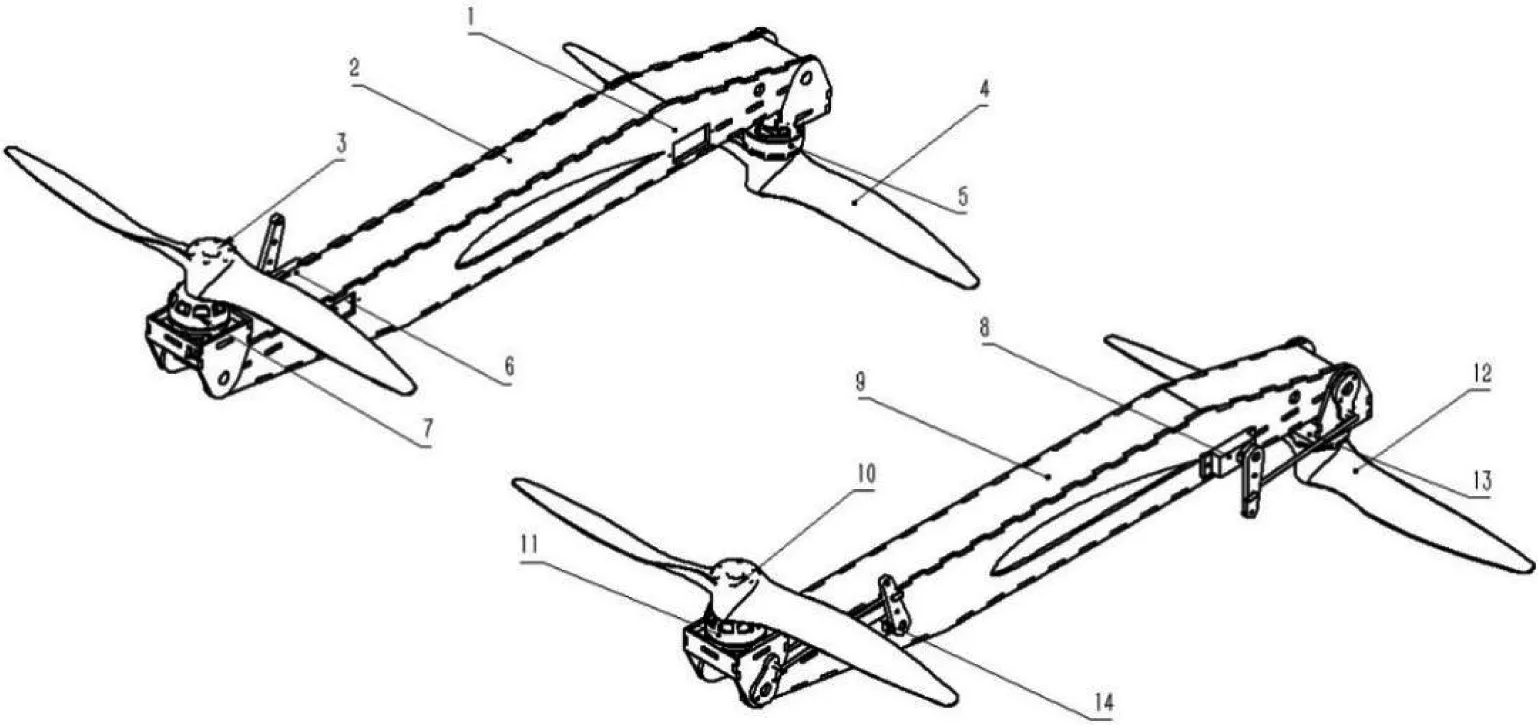
图8 可倾转四旋翼系统
可倾转四旋翼系统的结构臂和机翼采用嵌套的方法纵向固定在机翼上,在横向用平行于机翼的横梁。工字型倾转旋翼结构上安装两对相反旋转方向的旋翼。四旋翼模式下,如图9所示,前侧两旋翼竖直向上,后侧两旋翼竖直向下,旋翼启动后,整体提供向上升力,各旋翼扭力相互抵消,体现较好的控制稳定性。
固定翼模式下,如图10所示,前侧两旋翼相对飞行器向前提供拉力,后侧两旋翼提供向后推力,整体提供向前的合力[4]。一个结构臂两端各安装一个舵机,使用三连杆结构控制旋翼倾转,飞行控制系统通过控制舵机来控制两个旋翼的倾转方向。
可倾转四旋翼系统的设计,使飞行器在整个飞行过程中不存在旋翼不工作的状态存在。倾转机构选用三连杆机械结构。而复合翼构型无人机,旋翼系统不可倾转,进行固定翼模式下的巡航飞行时,提供垂直升力的四颗旋翼不工作,只能作为阻力和额外载重存在。因此通过对比,可倾转旋翼系统可以实现动力系统的减重和减阻,实现对复合翼构型的垂直起降无人机改进优化。
2.1 动力学建模
根据牛顿欧拉公式,可得到可倾转四旋翼系统的动力学方程如下:

式中m和Ib分别为飞行器质量和转动惯量。等式右侧表达式中的总推力项Ft和Mt总力矩项根据所研究飞行器不同而存在差异[7]。本飞行器总推力项Ft如下式所示:

式中Fth、Fw、Fg分别为电机推力、机翼产生的升阻力、重力[7]。
本飞行器总力矩项如下式所示:

式中Mth、Mw、Mgyro分别为电机产生的力矩、机翼的气动力矩和旋翼螺旋效应产生的力矩[7]。
四旋翼模式下,前侧两旋翼提供向上拉力,后侧两旋翼提供向下推力,整体提供向上升力,各旋翼力矩相互抵消;固定翼模式下,前侧两旋翼提供向前拉力,后侧两旋翼提供向后推力,整体提供向前拉力,各旋翼力矩相互抵消。固定翼模式下,还可通过各旋翼的矢量控制与差速控制,实现转向、滚转和俯仰动作。
四旋翼无人机飞行控制技术发展至今,已经非常成熟,结合飞行控制系统完全可以实现飞行平稳安全。四颗旋翼驱动电机的选型,只要满足飞行器垂直起降时,四旋翼所提供最大静拉力为飞行器整体重量的2倍,即可保证飞行器所有状态下的需求。而复合翼构型无人机还要额外加装一台发动机或电动机驱动主旋翼,满足固定翼巡航飞行时的需求。通过对比可以直观展现重量的差异。可倾转旋翼系统可以使得飞行器的整体重量进一步减轻,提高飞行性能。
3 混合双电源系统
混合双电源系统由氢气罐、氢气反应堆、小容量高倍率锂电池,以及电源切换电路组成。电源切换电路可以接收来自飞行控制系统的控制指令,自动无缝切换接入电源,实现不同飞行模式下,使用不同电池供电。电源切换电路如图11所示。
利用氢燃料电池重量与输出功率成正比关系的特性,结合垂直起降无人机中,固定翼模式的功率需求低、持续时间长,四旋翼模式的功率需求高、持续时间短的特性,选择可满足固定翼模式下功率的氢燃料电池和小容量高倍率锂电池组成混合双电源系统。

图9 四旋翼模式
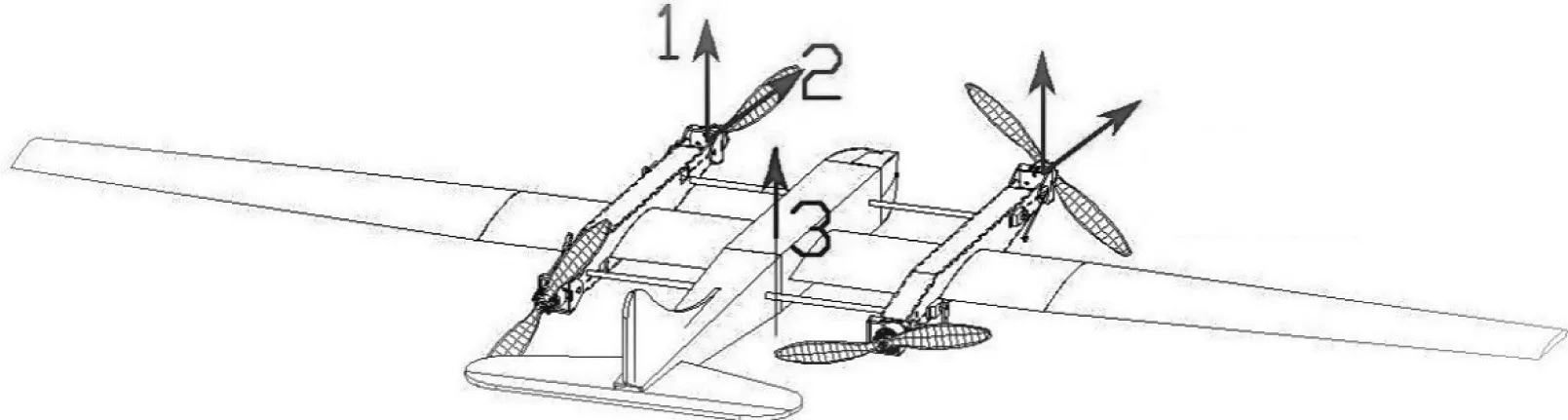
图10 固定翼模式
该电路可以根据当前所处飞行模式,自动无缝切换供电电源。实现在工作过程中可以时刻满足飞行器功率需求,又降低整个电源系统的质量。对比飞行器通常采用的供电电源系统,混合双电源系统将锂电池和氢燃料电池结合使用,比现在普遍使用的锂电池或发动机发电的电源更轻,几乎没有震动噪音而且环保。可以使得飞行器的重量进一步减少,进一步提高飞行器的性能。
4 飞行控制系统
飞行控制系统基于开源飞行控制系统(以下简称飞控)Pixhawk与ArduPilot开发,它是基于Pixhawk4 FMUv5设计,采用Dronecode标准引脚定义[1]。主控制芯片选用STM32F765处理器,其主频高达216 MHz并且含有2 MB FLASH/512 K RAM,飞控支持各类空速计传感器、遥测无线电模块、测距仪/距离传感器、差分GPS模块等。
飞行控制系统采用三度冗余imu,但其选用了更为稳定的ICM-20602/ICM-20689/BMI055/IST8310等传感器,提高了其在不同温度下的适应能力。实物如图12所示。
使用pc端地面站软件Mission Planner载入可以实现倾转飞行的控制逻辑到飞行控制系统,进行多次的倾转飞行测试,调整参数,最终实现流畅切换。通过pc端地面站软件Mission Planner连接飞控,飞行器还可以实现预设航线任务,自主飞行。
飞行控制系统在整体飞行过程中根据预设飞行指令飞行。图13、图14中曲线1为预设指令控制信号,曲线2为随控制指令响应的旋翼倾转信号,曲线3为四旋翼其中一个的转速控制信号。
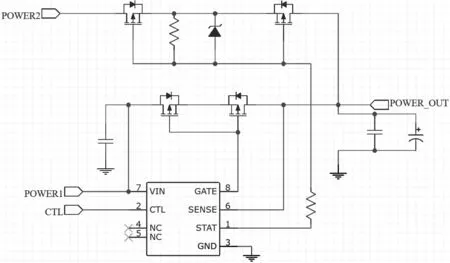
图11 电源切换电路

图12 飞行控制系统实物图
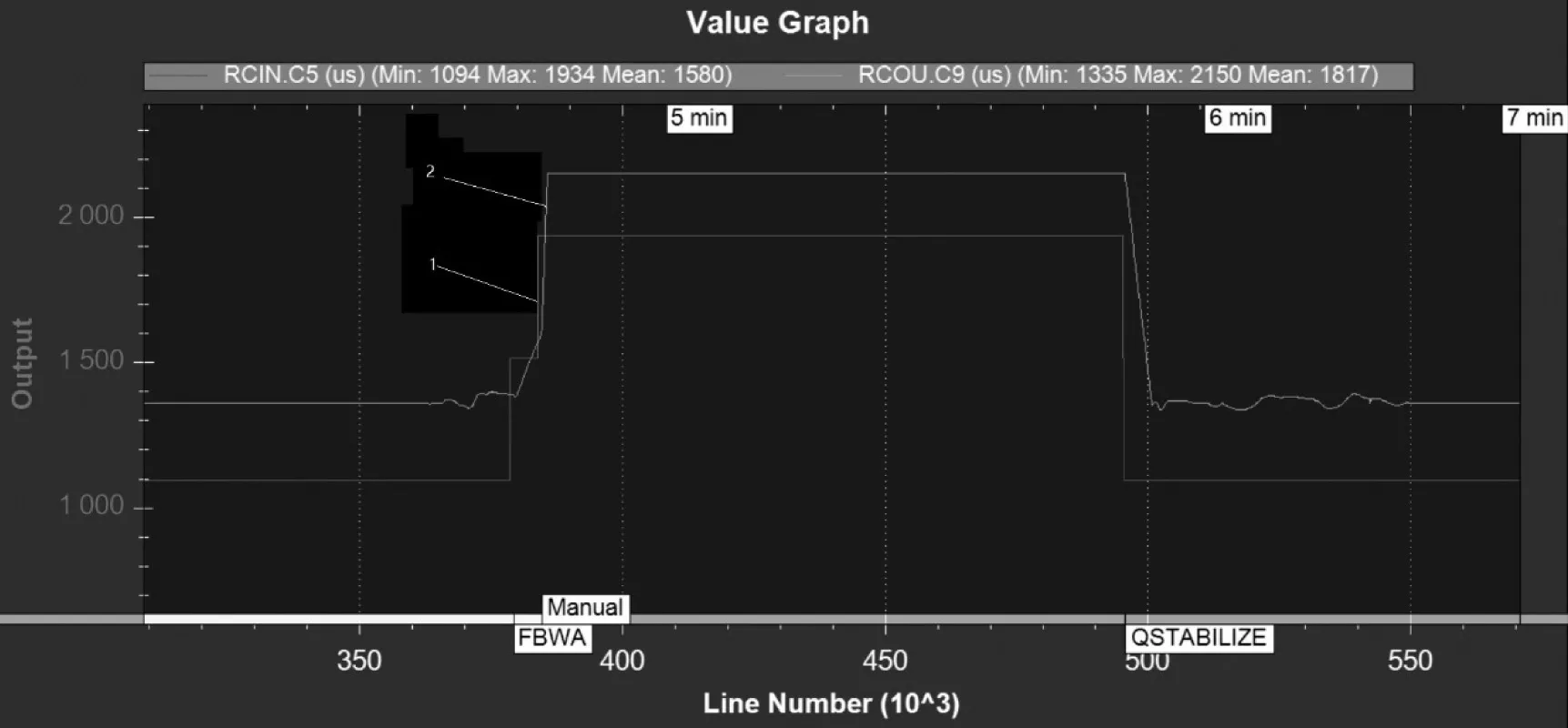
图13 旋翼倾转信号
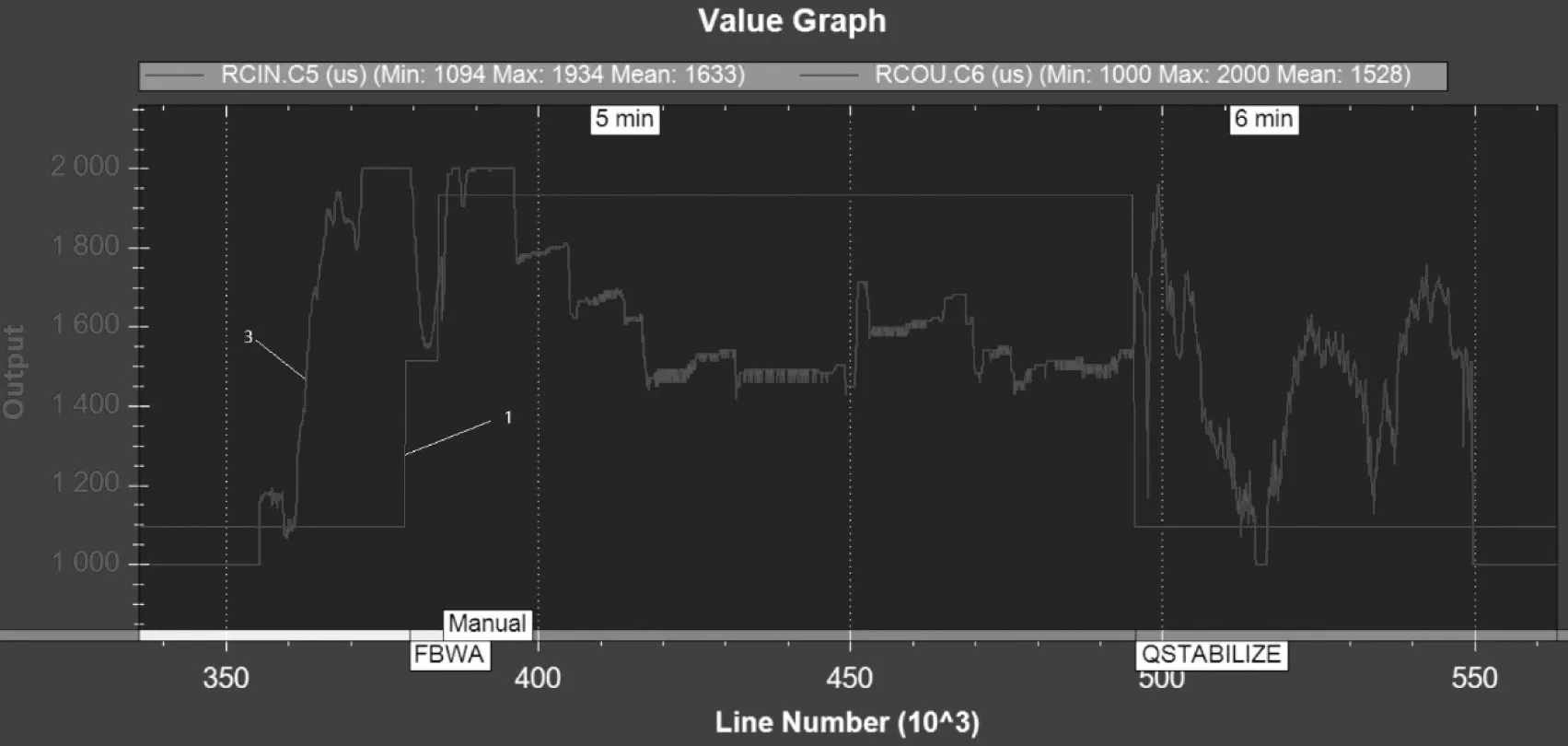
图14 转速控制信号
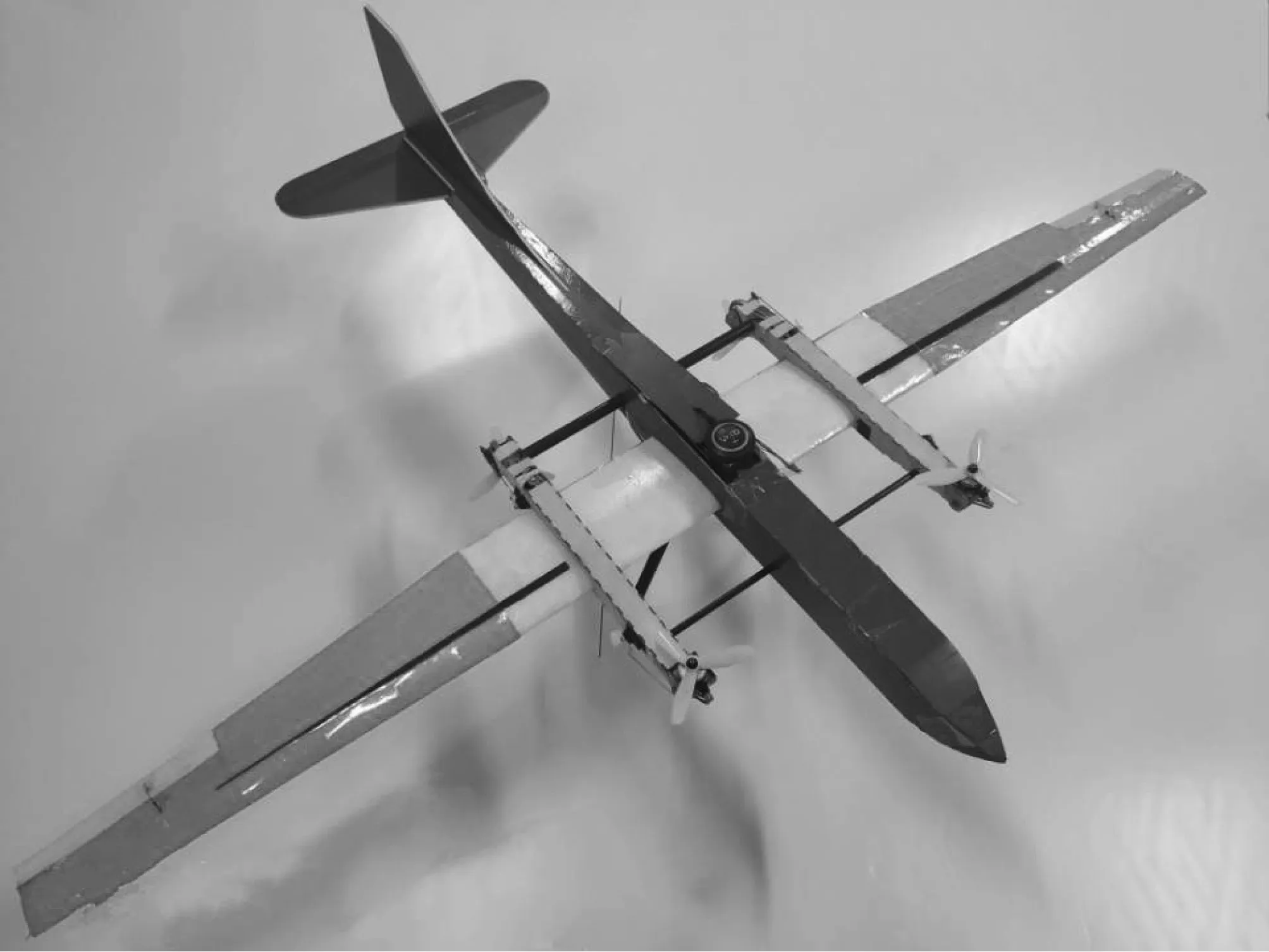
图15 测试模型飞行器
基于此设计的模型飞行器如图15所示,已完成全部飞行测试,可实现垂直起降、倾转飞行、定点悬停功能,验证了此设计的可行性。
5 总结
本文主要介绍了氢锂混合能源倾转旋翼无人机的整体、可倾转四旋翼系统、飞行控制系统等的设计。由于这种飞行器具有垂直起降、空中悬停、高速巡航、续航能力增强、载重能力增加、环保的优点,因此具有较高的应用价值和良好的市场前景[2]。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
电子制作(2019年7期)2019-04-25 13:18:24
上海铁道增刊(2017年3期)2018-01-22 03:01:02
航空模型(2016年10期)2017-05-09 06:25:59
工业设计(2016年5期)2016-05-04 04:00:48
舰船科学技术(2016年1期)2016-02-27 15:39:22
航空学报(2015年4期)2015-05-07 06:43:28
电力需求侧管理(2014年5期)2014-03-20 13:36:00
振动、测试与诊断(2014年5期)2014-03-01 01:14:27