
基于dSPACE的电动舵机的模型辨识
2019-06-05 01:42:18贾军涛崔盈利冯子亮
汽车实用技术 2019年10期
贾军涛,崔盈利,冯子亮
基于dSPACE的电动舵机的模型辨识
贾军涛,崔盈利,冯子亮
(邢台职业技术学院汽车系,河北 邢台 054035)
文章以某型号电动舵机(EMA)为例,建立数学模型,搭建了半实物仿真测试平台。其中,上位机采用dSPACE标准组件系统,在Simulink中建立仿真模型,控制界面采用ControlDesk软件设计,可实现在线调整控制参数,实时监控相关变量。在所搭建的半物理仿真平台上对该型号的电动舵机进行了模型辨识,结果表明,该仿真平台能够满足电动舵机的辨识要求,相对于正弦扫频信号,M序列的辨识效果更加令人满意。
dSPACE;电动舵机;模型辨识
1 前言
电动舵机(EMA)是飞行器控制中的重要子系统。EMA由直流或交流电机、驱动器、控制器、传感器、传动和安全装置等组成。半物理仿真(HILS)在电动舵机控制系统的发展中起着重要作用。本文提出了一种基于dSPACE的HIL实时仿真平台的结构和方法。第二节详细介绍了电动舵机的数学模型,第三节介绍了如何使用dSPACE硬件和软件实现HIL仿真平台,并在第四节中对电动舵机进行模型辨识并详细分析了辨识效果。
2 数学模型
EMA的数学模型[1]如下所示:




式中:为相电压;为相电流;为绕组电阻;绕组电感;为绕组反电动势;为机械角速度;C为反电动势系数;C为转矩系数;T为电磁转矩;T为转换到电机轴上摩擦力矩;T为转换到电机轴上的负载铰链力矩;J为电机转子及负载的转动惯量。
3 测试平台的设计与搭建
3.1 总体设计
基于dSPACE的电动舵机系统的半实物仿真平台包括两大部分:硬件部分和软件部分。半实物仿真平台的整体结构如图1所示,硬件系统用来控制舵机的执行机构并采集舵机的位置反馈信号,它主要由上位机,dSPACE仿真机与电动舵机构成;软件系统用来生成激励信号,确定控制算法,显示和分析舵机的位置反馈信号,在线调整控制算法。它主要由主机软件、信号发生器模块、数据采集模块、控制算法模块和性能分析模块组成。

图1 半实物仿真平台的整体结构图
3.2 硬件
上位机中运行Matlab和dSPACE的配套软件;dSPACE仿真机通过光纤和主控计算机相连,保证数据的上传与下载;dSPACE仿真机里的板卡通过扁平电缆引出到插接键面板;插接键面板和驱动板通过BNC插接键进行连接;驱动板与电动舵机通过插座连接。
该半实物仿真平台上用到的dSPACE板卡主要为连接板卡DS817和DS814,处理器板卡DS1005,A/D板卡DS2001,D/A板卡DS2102,PWM板卡DS4002。其中DS4002作为PWM波的输出板卡,将控制信号转换为一路PWM波输出,用来控制驱动器;DS2001板卡作为A/D转换板,将位置传感器的反馈回来的电压模拟信号转换为电子信号,输送给dSPACE目标机;DS2102作为D/A转换板,将电子信号转换为电压模拟信号,输送给电动舵机的驱动器,控制舵机的转动方向。
3.3 软件
软件系统包括两大部分:RTI和测试软件。RTI是dSPACE与Matlab的媒介,通过RTW可以将Simulink中所建立的数学模型快速转换为dSPACE的硬件代码。测试软件主要是ControlDesk,通过它可以搭建上位机控制界面,关联数学模型中的变量,采集实验数据,在线调整控制参数。
电动舵机的仿真平台的仿真框图[3,4]如图2所示,其中DS4002PWM1-OUT1为DS4002的RTI,PWM波的频率为15KHZ,有效占空比为4%-96%,故Duty cycle的输入范围为0.04~0.96;DS2001-B1为A/D转换板DS2001的RTI,由于反馈的电压变化范围为-10V~+10V且DS2001的输出与实际输出电压之比为1:10,故DS2001的输出为-1~+1;DS2102-B1作为D/A转换板DS2102的RTI,由于输入的电压变化范围为0V~+5V且DS2001的输入与实际输入电压之比为1:10,故DS2001的输出为0~+1。
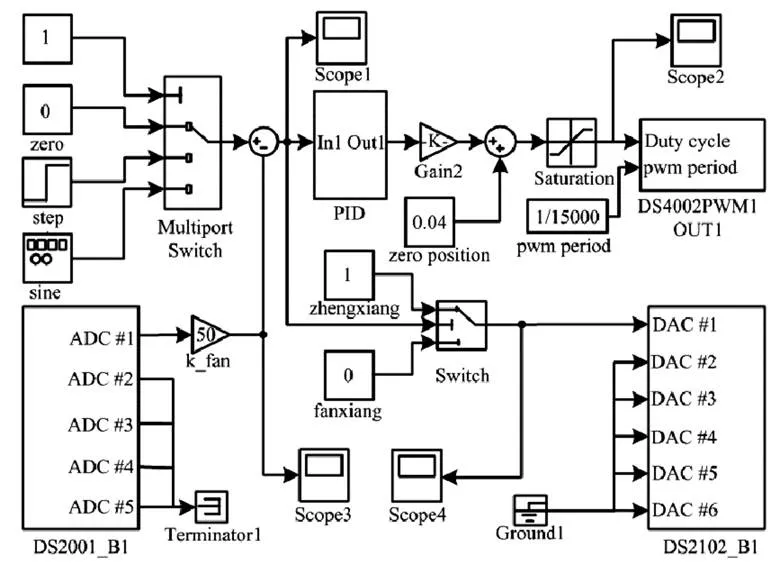
图2 电动舵机的仿真平台的仿真框图
为了更好地实时在线调整参数,利用ControlDesk软件编写了主控计算机的控制界面,如图3所示。在该虚拟仪表控制界面上,包括五个区域,分别是图像显示区、信号发生区、信号采集处理区、控制器参数调整区、主控区。图像显示区用以显示输入信号和输出信号;信号发生区可以产生所需要的输入信号:M序列、正弦信号等各类信号;信号采集处理区用于采集处理实验测试中的数据,具有设置仿真步长,导出实验数据等功能;控制参数调整区可以在线调整控制器的参数;主控区可以完成整个测试实验的开始、停止和暂停等功能。
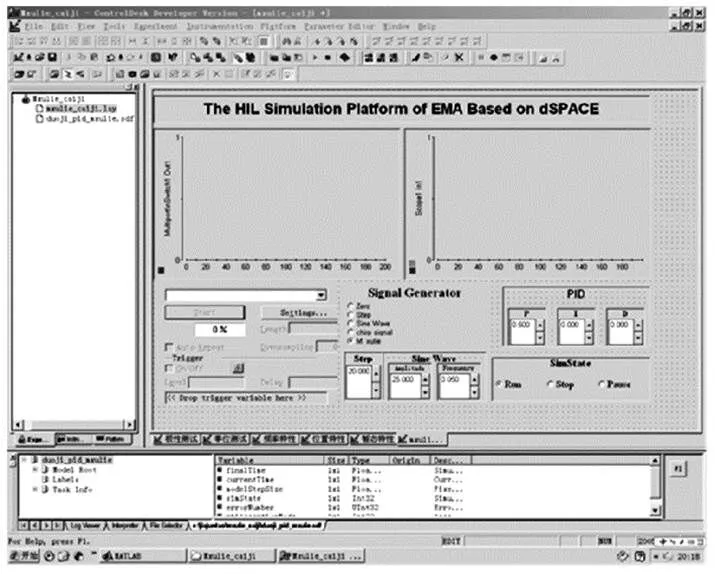
图3 半实物仿真平台的控制界面
4 模型辨识实验
4.1 基于M序列输入输出信号的辨识
M序列是二进制伪随机码序列(PRBS)的一种特殊形式[5,6],为了使所采集的数据尽可能多的包含系统的动态信息,M序列的参数要按照下式的准则进行选择。

式中,为M序列的周期,f为最高工作频率。

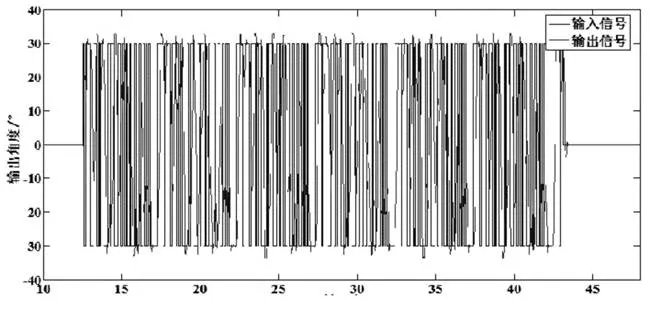
图4 M序列测试系统时的输入与输出角度
将所获得数据分为两段,其中10~30s的数据用于辨识系统,30~45s的数据用于辨识模型的检验。
首先利用Matlab辨识工具箱辨识舵机系统的模型阶次,然后利用最小二乘法的原理辨识系统的模型如下:

利用30~45s的采集数据检验所获得的模型,得到实测数据与模型输出对比,如图6所示。可以看出模型与数据符合度达到83.74%,基本符合。
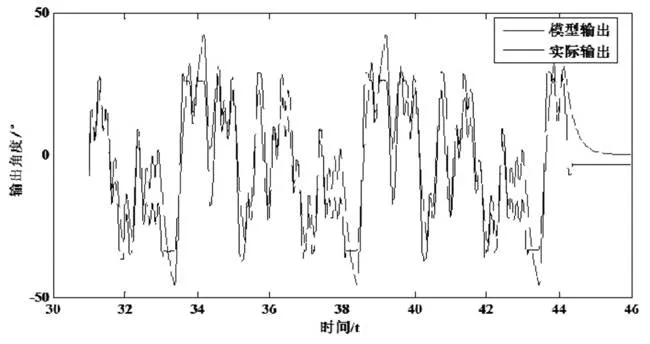
图5 M序列辨识模型检验结果
4.2 基于正弦扫频输入输出信号的辨识
实验所用的舵机系统的频宽低于40HZ,选用频率为1~120Hz线性变化的正弦扫频信号作为输入信号,对系统进行正弦扫频测试,将采集的输入输出数据进行相应的数据处理,系统输入输出信号如图6所示。
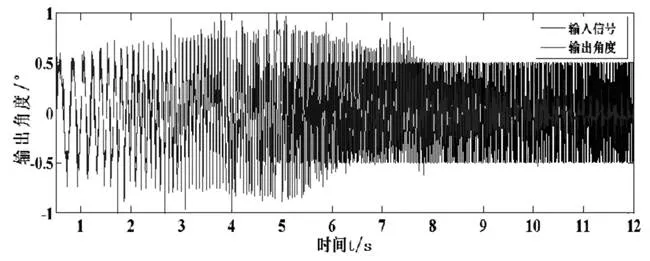
图6 采用正弦扫频信号测试的输入输出信号
与M序列辨识方法类似,可得系统模型如下:

利用辨识的部分数据检验模型,得到模型与实测数据的对比图如图7所示。可以看出,模型的符合度只有59.45%,与M序列相比,正弦扫频信号作为输入信号的辨识效果不太满意,与M序列的辨识效果有差距。
5 结论
本文基于dSPACE搭建了某型号的电动舵机的半物理仿真平台,详细分析了测试仿真平台硬件及软件系统,采用M序列和正弦扫频信号对电动舵机进行了模型辨识。研究表明,该仿真平台能够满足电动舵机的辨识要求,相对于正弦扫频信号,M序列的辨识效果更加满意。
[1] 张琛,直流无刷电动机原理及应用,北京:机械工业出版社,2004.
[2] 崇阳,李言俊,张科,等.基于DSP的模糊PID舵机控制算法设计与实现[J].飞行力学, 2011, 29(2): 86-88.
[3] 曹着,朱纪洪.电动舵机模糊自适应PID控制[[J].中南大学学报, 2005, 36(1): 108-111.
[4] 康雷.人工神经网络在辨识与控制中的应用研究[D].东南大学, 1999.
[5] 王淑娟.加速度计环境模型辨识及其误差补偿技术[D].哈尔滨工业大学, 1998.
Model identification for Electromechanical Actuator Based ondSPACE
Jia Juntao, Cui Yingli, Feng Ziliang
(Automobile department, Xingtai Polytechnic College, Hebei Xingtai 054035)
In this study, to take a certain electromechanical actuator (EMA) for example, its mathematical model is built. The simulation computer uses the dSPACE standard component system, the simulation model is developed in Simulink. The control interface is designed by ControlDesk software, the control parameters is adjusted online, and the related variables can be monitored in real time. The model identification for the EMA is researched in the HIL simulation platform. The results show that the simulation platform can meet the identification requirements of the EMA. Compared with the sinusoidal sweep frequency signal, the identification effect of M sequence is more satisfactory.
dSPACE;EMA;Model identification
10.16638/j.cnki.1671-7988.2019.10.034
U467
A
1671-7988(2019)10-94-03
U467
B
1671-7988(2019)10-97-03
贾军涛,硕士,助教,就职于邢台职业技术学院,新能源汽车及电机方向。
猜你喜欢
航天器环境工程(2020年3期)2020-11-04 06:46:24
自动化学报(2019年6期)2019-07-23 01:18:36
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
电子制作(2018年1期)2018-04-04 01:48:14
电子测试(2017年12期)2017-12-18 06:35:24
电子制作(2017年8期)2017-06-05 09:36:15
制造业自动化(2017年2期)2017-03-20 14:26:08
通信技术(2016年12期)2016-12-28 10:34:54
火控雷达技术(2016年3期)2016-02-06 02:30:33
