
杠杆表测杆长短与转角对测量误差的影响
2019-05-29 01:28田俊成
制造技术与机床 2019年5期
张 帆 田俊成
(陕西工业职业技术学院,陕西咸阳712000)
杠杆表主要用于工件的形状、位置和尺寸误差的测量,是机械加工中常用的精密量具之一,因其结构小巧、杠杆测头(以下简称测杆)可任意扳转、使用灵活、操作方便等优点,在几何量检测中得到广泛应用。但是杠杆表存在不可避免的原理误差,因此测杆的长度a、使用中测杆板转的角度θ,对测量误差会产生很大的影响。
1 杠杆表机构与原理的误差分析
和齿轮 z1、z2、z3、z4作为传动和放大机构的机械量仪,也是杠杆表中最常用的杠杆齿轮式四级传动机构。
由图1机构可知,测杆a可以在左右两个方向旋转,形成两条传动链,其目的只是为了改变测杆的方向,且两条传动链只有一个分度盘,因此两条传动链的传动比是同一机构,其传动公式可写为:
1.1 杠杆表的传动机构
由图1可知,杠杆表的机构是利用杠杆 a、b、c、d
根据量仪放大比关系又可得:

式中:n为刻度盘的刻线间距;i为杠杆表的分度值;g为分度盘圆周刻度数。

1.2 杠杆机构的原理误差
杠杆表采用正弦不等臂杠杆机构和圆周等分刻度,如图2所示,测杆由o点旋转到o1点时传动机构产生的原理误差Δsy,等于测杆的弧位移aθ与测杆的直线位移asinθ之差,即原理误差公式为:


由于杠杆表第一级传动采用不等臂杠杆机构,设a为测杆的长度,测杆的行程s与测杆的转角θ之间的传动关系为:

式中:θ为杠杆表测杆转角(弧度),rad;a为杠杆表测杆的长度(各厂家不尽相同,一般为12~16 mm);s为杠杆表测杆的行程(杠杆千分表为0.2 mm,杠杆百分表为0.8 mm)。
2 杠杆表测杆各参数对测量误差的影响
2.1 杠杆表测杆转角θ对测量误差的影响
由图2可知,式(4)中的测杆长度a是个定值,那么原理误差Δsy的大小就取决于θ的大小。
当a=15 mm 时,设θ为 10°、30°代入式(5)分别求得:
以上计算是为了证明原理误差Δsy随转角θ变化不是线性关系,这是因为正弦机构原理误差服从近似的三次抛物线规律,即:Δsy≈aθ/6,也就是说随着转角θ的增大,误差是非线性急剧增大,因此在杠杆表使用时转角θ一定要尽可能小。
2.2 测杆长度尺寸a对行程误差的影响
由式(5)可知,测量行程s与测杆的长度尺寸a有关。生产厂按设计要求对长度尺寸a有严格的控制,安装到表体后经检定合格才可出厂。为调整杠杆表测杆的长度,有的厂家还配有调整长短的垫片,因此测杆长度是不能随意改变的。
但在教学调研中发现有一公司员工,使用杠杆千分表时将测杆摔断,便在网上随便购买了新测杆进行更换,用了几年也不知道这是错的,因为他买的和原来的测杆长度不一样,经后来的测试得知新买测杆长度为ax=14.5 mm,老测杆的标准长度是a=13 mm,比标准测杆长了1.5 mm。
将新、老测杆长度代入式(5)可求出对测量行程产生的误差。
已知杠杆千分表的行程s=0.2 mm,将标准测杆长度a=13 mm代入式(5)先求出标准测杆长度下的理论转角θb为:

再将θb=0.882°、αx=14.5 mm 代入式(5)求得新测杆的行程Sx为:

再用新测杆的行程sx减去标准测杆的行程s,得新测杆的行程误差Δsx为:

由以上计算可知新测杆走完0.2 mm行程产生的误差为0.023 mm。检定规程允许的误差为0.004 mm,新测杆产生的误差接近允许误差的6倍,这么大的误差是无法保证产品质量的。以上计算证明测头长度是不能随意改变的。
3 测量实例
3.1 外圆跳动测量
由于杠杆表存在原理误差,因此正确的方法应该是,测杆轴线与工件测量点切线平行(或者说测杆轴线与测量线垂直),如图3所示。如果不能平行时可由式(7)修正。


式中:hx为正确的测量结果;hd为杠杆表的读数值;θ为测杆轴线与工件测量点切线的夹角。
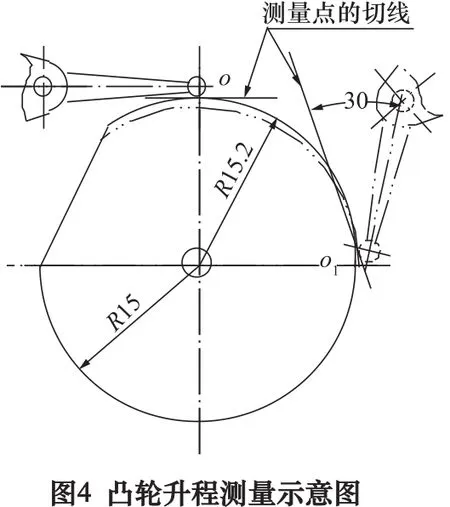
图4是测量一个升程h为0.2±0.01 mm的凸轮,正确的方法应将测头置于o点的位置,此时θ=0。但有时不得已将测头置于o1位置时,以测杆轴线与测量点切线的夹角为θ=30°为例,测得杠杆表读数为hd=0.235 mm,判定工件不合格。这是由于杠杆表的原理误差误判工件。
现将杠杆表测量读数hd代入式(7):

修正后实际升程为hx=0.203 mm,修正后该工件是合格的。
3.2 平面度测量
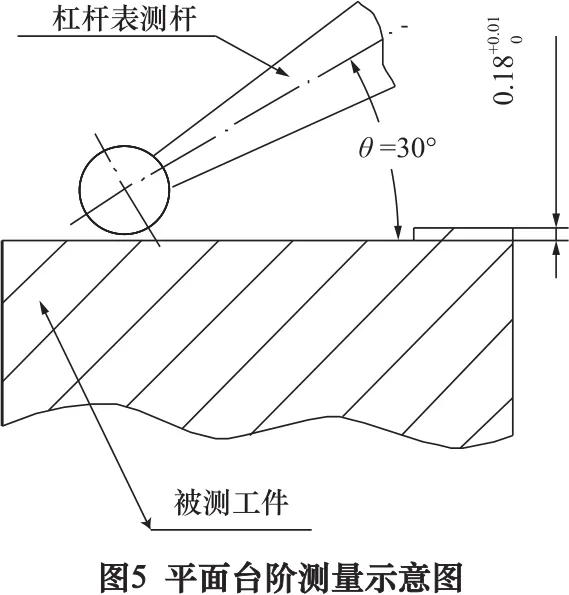
如图5所示测量一个平面台阶尺寸ht=0.180+0.01 mm,测得杠杆表读数为hd=0.188 mm,依据读数工件合格。经修正后的工件台阶实际高度为:
hx=hdcos30°=0.188×0.866=0.163 mm
经修正后可知该工件不合格。
4 杠杆表的修正值系数表及应用
4.1 修正值系数表
在机械加工与测量中尽量使θ角为0,不得已情况下测杆板转角度时,一定要对测量值进行修正。各种角度下的修正值列入表1。

表1 转角修正系数表
4.2 修正值系数表的应用
修正值hx等于修正系数ξ乘以杠杆表读数hd。即:hx=ξhd。
5 结语
通过笔者对一些公司使用情况的调研,发现除极少数的专业技术人员有所了解外,很多使用者(包括一些计量人员)也不了解杠杆表存在原理误差,以为怎样使用都可以,经常出现误判工件的事件。这说明正确的杠杆表使用方法是一个值得注意的问题,建议生产厂家在出厂技术资料上做一些简要说明,以引起测量者注意从而掌握正确的使用方法。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
智能制造(2021年4期)2021-11-04
河北北方学院学报(自然科学版)(2021年3期)2021-04-12
人大建设(2020年3期)2020-07-27
黑龙江科学(2020年4期)2020-04-08
模具制造(2019年10期)2020-01-06
中学生数理化·教与学(2016年10期)2016-11-04
发明与创新(2016年5期)2016-08-21
探测与控制学报(2015年4期)2015-12-15
