纯电动汽车再生制动控制策略的研究*
2019-05-28 01:31昌诚程郑燕萍王昕灿马哲树
汽车技术 2019年5期
昌诚程 郑燕萍 王昕灿 马哲树
(南京林业大学,南京 210037)
主题词:纯电动汽车 再生制动 制动力分配 控制策略
1 前言
与内燃机汽车不同,纯电动汽车可以将制动能量回收再生,从而增加汽车的续驶里程,提高整车性能[1]。目前,再生制动控制策略的研究主要针对理想制动力分配控制策略、制动力按固定比值分配控制策略、最优制动能量回收控制策略和并联制动能量回收控制策略等4种。如文献[2]采用理想制动力分配控制策略设计了一种以制动强度和电池SOC为输入、电机制动比例为输出的模糊控制器,但这种控制策略会造成驱动轮在低制动强度下获得的制动力较小,能量回收效率不理想;文献[3]以固定比值进行前、后轮制动力的分配,基于模糊控制得到机电复合制动下再生制动的比例,希望在保证汽车制动稳定性的基础上高效地回收制动能量,但这种控制策略存在回收能量不能最大化,而且只能在小于同步附着系数的路面上保证汽车制动的稳定性;文献[4]在保证驱动轮制动力最大化并满足ECE法规的条件下完成了前、后轮制动力分配,然后将电池SOC、制动强度和预估的机械制动效能因数引入模糊控制器,得到再生制动分配比例,但这种控制策略同样只能在部分附着系数路面上保证汽车制动的稳定性。
本文在前人研究的基础上,提出以路面识别模块为基础,在满足汽车制动法规的前提下,兼顾制动稳定性和制动能量回收效率,将f线(前轮抱死后轮不抱死时前、后轮地面制动力关系曲线)、ECE法规线和I曲线(理想的前后轮制动器制动力分配曲线)相结合,制定汽车前后轮制动力分配曲线,并设计一种三输入的模糊控制器来分配再生制动的比例。这种再生制动控制策略可以根据不同的路面附着系数动态地调整控制策略,从而在保证汽车制动安全的前提下提高再生制动能量的回收效率。
2 再生制动控制策略
本文将再生制动控制策略分为前后轮制动力分配策略和再生制动分配策略。以高级车辆仿真器ADVISOR中某前轮驱动的纯电动汽车为研究对象,其主要参数如表1所列。

表1 某前轮驱动的纯电动汽车主要参数
2.1 前后轮制动力分配策略
2.1.1 路面识别方法
轮胎模型采用Burckhardt等人建立的半经验模型,该模型以大量的路面试验数据为基础[5],路面附着系数模型表达式为:

式中,c1、c2、c3为与路面类型相关的常数;s为滑移率;ua为车轮纵向速度;ωa为车轮角速度;r为车轮滚动半径。
为了能正确地识别路面类型,采用路面状态特征值τ的概念,并将其作为路面识别参数,其定义为[6]:

式中,φ(s)为制动过程中的制动力系数。
将Burckhardt的数学模型带入式(3),令滑移率s的积分上限等于最佳滑移率sp,此时τ等于τm,并将τm作为各典型路面特征值的门限值。
由于水泥路面和干沥青路面特征值的门限值差距较小,因此将这两种路面合并,得出典型路面的特征值区间,如表2所列。
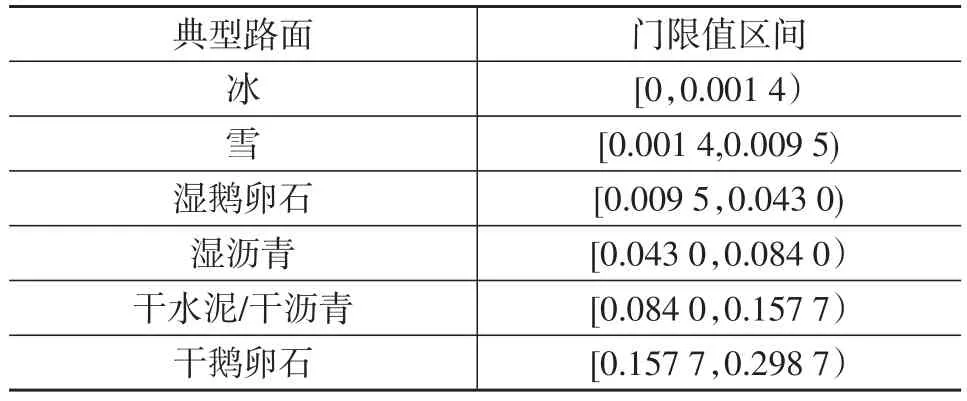
表2 典型路面特征值区间
2.1.2 前后轮制动力分配曲线设计
根据汽车理论,所设计的前、后轮制动力分配曲线由ECE制动安全法规线、f线和I曲线组合而成[7],并根据当前路面的附着系数选择不同的控制策略,使前轮在获得较大制动力的同时确保制动的方向稳定性。
制动力分配策略方案如下:利用车型参数求出ECE法规与横轴的交点,此点对应的汽车前轮制动力为2 412.72 N,后轮制动力为0,此刻对应的路面附着系数φ0=0.335 5。为保证制动时前轮不抱死,确定临界的路面附着系数为φx,根据公式φx=φ0/0.85计算得φx=0.394 7,将φx对应的f线称为fx线。
根据临界附着系数,将路面附着情况分为小路面附着系数情况和大路面附着系数情况,并分别设计了前、后轮制动力分配曲线,分配策略如下。
a.小路面附着系数情况(φ≤φx)。图1为路面附着系数φ<φx时的制动力分配曲线(假设当前路面附着系数φ=0.3),曲线OABC为前、后轮制动力分配曲线,并且随路面附着系数变化而变化,线段AB是将当前路面附着系数φ所对应的f线组左移后得到的,且线段AB的前轮制动力是f线制动力的85%,线段OC是I曲线。

图1 小路面附着系数下的的前后轮制动力分配曲线
路面附着系数φ≤φx时的前轮制动力分配曲线方程为:
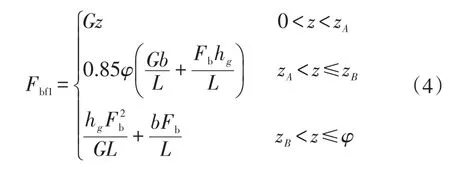
式中,Fbf1为φ≤φx时的前轮制动力;zA、zB分别为A、B点所对应的制动强度,z为当前制动状态下的制动强度;G为整车整备质量;φ为路面附着系数;b为质心到后轴距离;hg为质心高度;L为轴距;Fb为总制动力。
b.大路面附着系数情况(φ>φx)。图2为路面附着系数φ>φx时的制动力分配曲线(设当前路面附着系数φ=0.7),曲线ODEFG为前、后轮制动力分配曲线,线段DE是ECE法规线,线段EF同样是当前路面附着系数φ所对应的f线左移后得到的,线段OG是I曲线。

图2 大附着系数情况前后轮制动力分配曲线
路面附着系数φ>φx时的前轮制动力分配曲线方程为:

式中,Fbf2为φ>φx时的前轮制动力;zD、zE、zF分别为D、E、F点对应的制动强度。
2.2 基于模糊控制的再生制动分配策略
将实时的制动强度z、电池SOC和车辆速度V作为模糊控制器的输入,再生制动占前轮总制动力的比例k作为模糊控制器的输出[8]。制动强度z的隶属度函数如图3所示,制动强度z的取值为[0,1],当z较低时,应尽量采取再生制动方式;当z较高时,汽车处于紧急制动状态,此时应采用摩擦制动方式。隶属度函数使用梯形函数,模糊语言变量为非常低、低、中等、高和非常高,制动强度z的模糊集设置为{VL,LO,MI,HI,VH}。

图3 制动强度z隶属度函数
电池SOC的取值为[0,1],且SOC较小时应增加再生制动比例,保证车辆的正常行驶;当电池SOC较高时,为了延长电池寿命,应减小再生制动比例。电池SOC隶属度函数取钟型和高斯型,如图4所示,其模糊语言变量为非常低、低、中等、高和非常高,故其模糊集为{VL,LO,MI,HI,VH}。

图4 电池SOC隶属度函数
本文采用的汽车最高车速为111 km/h,取值范围为[0,111]。当车速小于10 km/h时,电机转速较低,制动能量回收能力较弱,因此采用较低的再生制动比例[9];当车速大于10 km/h时,再生制动比例由制动强度z和电池SOC决定。车速隶属度函数取梯形函数,如图5所示,其模糊语言变量为低和高,模糊集设置为{LO,HI}。

图5 车速隶属度函数
再生制动比例k隶属度函数采用梯形函数,如图6所示。k取值为[0,1],其模糊语言变量为非常低、低、中等、高、非常高,将模糊集设置为{VL,LO,MI,HI,VH}。

图6 再生制动比例k隶属度函数
根据隶属度函数的分析和仿真研究,设计的模糊控制器规则库如表3所列。
3 仿真分析
利用矩阵实验室MATLAB中的Simulink工具搭建了控制策略模型,将其镶嵌到ADVISOR中进行二次开发,选取日本CYC_1015和美国CYC_UDDS[10-11]两种循环行驶工况进行模拟仿真,并与ADVISOR原控制策略进行对比。
3.1 仿真模型建立
在路面识别模块中,输入为地面制动力、车轮的垂直载荷和滑移率,输出为典型路面的平均附着系数。图7为再生制动控制策略的前、后轮制动力分配和再生制动分配仿真模块,模块的输入是需求总制动力Fb,根据当前路面附着系数和制动强度,选取前、后轮制动力分配曲线,再根据输入Fb计算前、后轮的总制动力Fbf和Fbr。因为车辆为前轮驱动,所以后轮总制动力即为后轮摩擦制动力,而前轮再生制动力需要由模糊控制器根据制动强度z、车速V和SOC计算出的前轮再生制动比例k与前轮总制动力相乘得出,再将前轮总制动力减去再生制动力得到前轮摩擦制动力,最后将前轮摩擦制动力和后轮摩擦制动力输出给上层模块。

表3 模糊控制规则
3.2 仿真结果分析
在CYC_1015和CYC_UDDS工况下,控制策略优化前、后电池SOC随时间变化曲线如图8所示。由图8可看出,利用优化后控制策略仿真得到的电池SOC变化曲线相比原控制策略仿真得到的曲线下降缓慢,并且曲线数值较高,这表明所设计的控制策略能够回收更多的能量。
在CYC_1015和CYC_UDDS工况下,控制策略优化前、后纯电动汽车电机输出转矩如图9所示。从图9可以看出,当转矩为正时(电动机处于驱动状态,消耗电池能量),两种控制策略下的仿真曲线重合,说明纯电动汽车获得的驱动力大小相等;当转矩为负时(电机处在再生制动状态,向电池输入电能),优化后控制策略所得仿真曲线峰值的绝对值较大,表明电机回收了更多的制动能量给电池。

图7 需求再生制动力模块
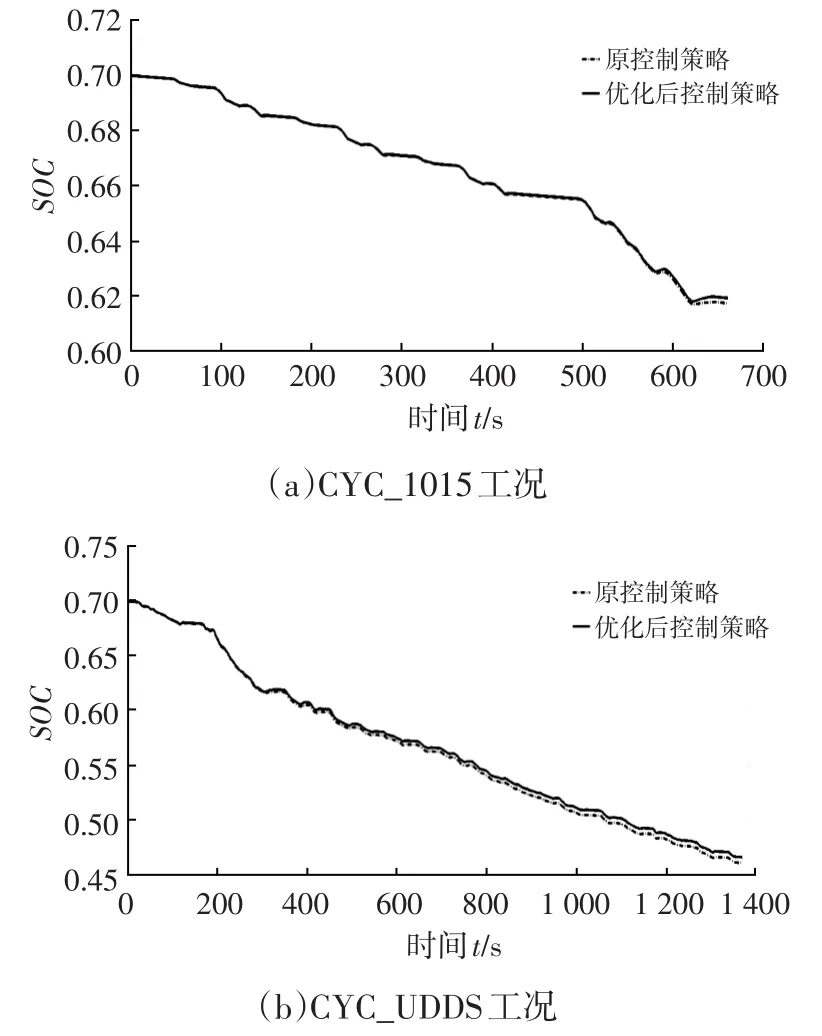
图8 两种工况下控制策略优化前、后电池SOC变化曲线
为客观地评价所设计控制策略的能量回收效果,利用制动能量回收率ηb和有效制动能量回收率ηeb两个评价指标进行分析:

式中,Er为电池回收的能量;Eb为制动总能量;Ev为整车能量损耗。
ηb和ηeb的计算结果如表4和表5所示。由表4和表5可知,在CYC_1015工况和CYC_UDDS工况下,ADVISOR原控制策略的SOC值都小于优化后控制策略的SOC值,并且在优化后的控制策略下,电池通过再生制动回收的能量都大于原控制策略下回收的能量,有效制动能量回收率也相对较大,说明优化后控制策略比ADVISOR原控制策略能更好地回收制动能量,提高了纯电动汽车的续驶里程。

图9 两种工况下控制策略优化前、后电机转矩

表4 CYC_1015工况下控制策略优化前、后制动能量对比

表5 CYC_UDDS工况下控制策略优化前、后制动能量对比
4 结束语
以某纯电动汽车再生制动系统为研究对象,提出了基于模糊控制器的再生制动控制策略,这种控制策略是以路面识别为前提,实时地进行再生制动控制策略的调整,能够在保证汽车行驶安全的前提下,提高制动能量的回收效率,从而提高纯电动汽车的续驶里程。以ADVISOR为平台,建立了控制策略的仿真模型,在日本CYC_1015和美国CYC_UDDS两种循环行驶工况下进行了仿真测试,将仿真结果与ADVISOR原控制策略进行了对比,验证了所设计控制策略的有效性。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
防爆电机(2022年3期)2022-06-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
电机与控制学报(2018年9期)2018-05-14
发明与创新·中学生(2017年7期)2017-07-10
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10