
基于UG与MatLab马铃薯挖掘机分离筛仿真与优化
2019-05-27 08:56王春光谢胜仕邓伟刚
农机化研究 2019年11期
李 建,王春光,谢胜仕,邓伟刚
(内蒙古农业大学 机电工程学院,呼和浩特 010018)
0 引言
随着我国马铃薯主粮化战略的提出,马铃薯的种植面积快速扩大,但与快速膨胀的种植规模不相称的是我国马铃薯收获的机械化程度。近年来,越来越多的科研单位对马铃薯挖掘机展开研究,但现有的马铃薯挖掘机仍存在着薯土分离效果不佳和马铃薯破损率高的缺陷。目前,市场上使用较广的中小型马铃薯挖掘机主要有升运链式和升运链—分离筛式两种机型。本文针对升运链—分离筛式收获机的参数进行研究,明确制约筛分效果的主要因素,并进行改进。
国内外马铃薯薯土分离技术的研究都是基于本国的国情展开的。以美、俄(前苏联)为代表的国家使用的多为大型联合收获机,以英、德为代表的国家对分离技术的研究朝向高精尖的方向发展,对筛分技术的研究也融合到收获机的整体中,已从最早的物理分离技术的研究过渡到了现在的光学分离技术的研究。国内各大科研院校对马铃薯收获机筛分技术的研究则是集中在中小型收获机。
笔者以内蒙古农业大学机械厂研制的4SW-170型马铃薯挖掘机作为研究对象,针对马铃薯挖掘机薯土分离效果不佳和马铃薯破损率高的问题,通过采用理论分析与虚拟技术融合的方式对分离筛运动规律进行研究,旨在为马铃薯收获机分离筛的优化提供依据。
1 分离筛的功能分析
摆动分离筛作为马铃薯挖掘机实现筛分功能的核心部件,分离筛的结构示意图如图1所示。设筛面倾角为ε,摆动方向角为α,摆杆倾角为β。机构的运动方式为偏心轮装置简化成的曲柄机构,通过旋转提供动力,曲柄每转1周分离筛前摆杆的摆动18°,由曲柄、前摆杆以及连杆构成的曲柄摇杆机构带动整套机构进行运动,由前摆杆和后摆杆以及筛架构成另一组曲柄摇杆机构带动筛条组合成的筛面沿振动方向的往复摆动;筛条的摆动可以分解为沿垂直方向的振动和沿水平方向的平动,实现筛分功能。
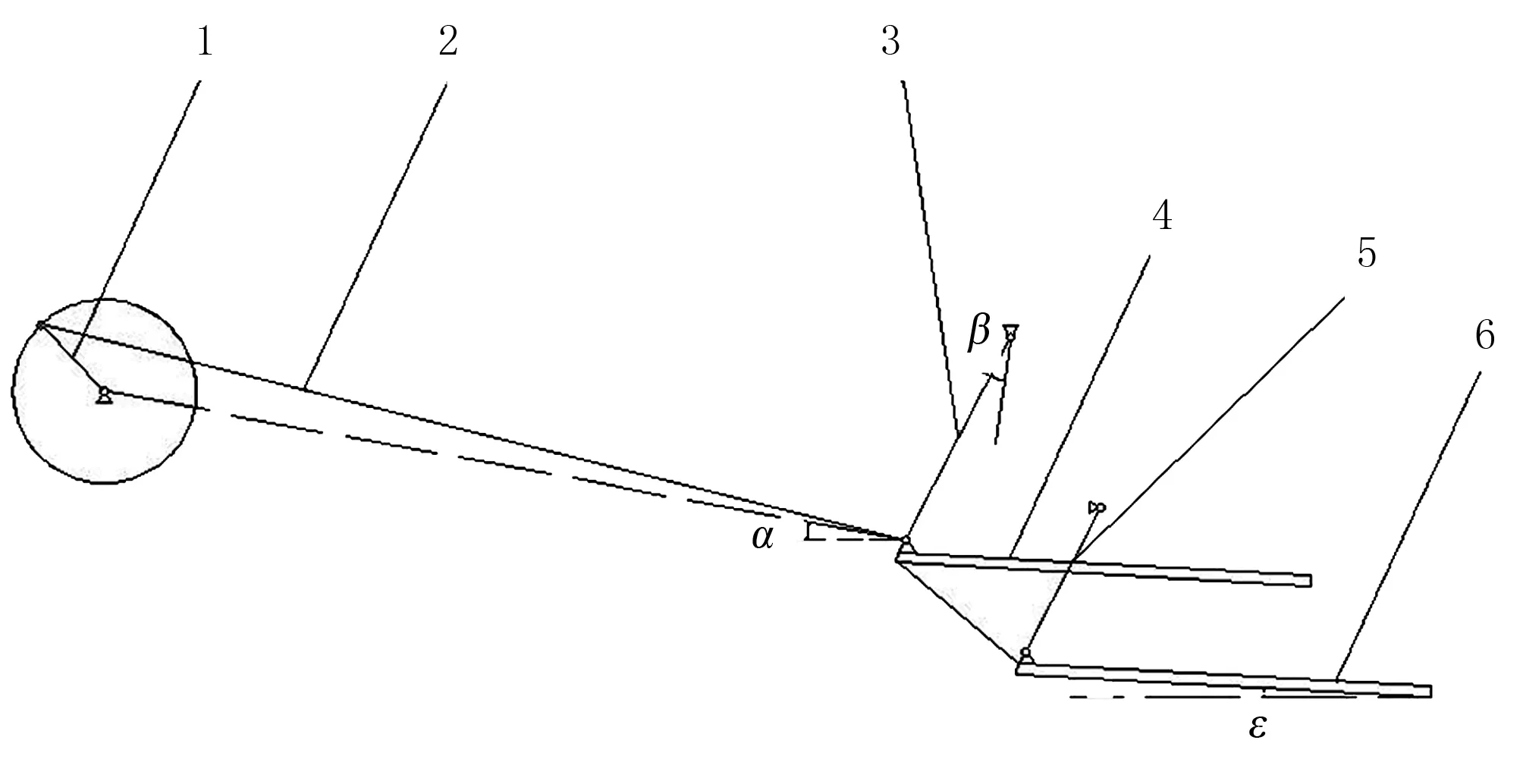
1.曲柄 2.连杆 3.前摆杆 4.一级分离筛 5.后摆杆 6.二级分离筛图1 马铃薯收获机分离筛结构示意图Fig.1 A schematic diagram of the separation and sieve structure of a potato harvester
为了研究马铃薯分离筛功能,使用UG NX8.0对分离筛的核心部件进行建模,如图2所示。建模后在运动仿真模块中选择ADAMS求解器进行求解。UG ADAMS求解器由UG的开发公司EDS公司和ADAMS开发公司MSC联合研制,目的是进行产品的强强联合,解决软件互导带来的问题。由马铃薯在分离筛上的运动规律可知,每级分离筛的末端为分离筛加速度的极值点,因此在马铃薯收获机两级分离筛筛条末端取标记点A1、A2作为加速度的测试点,获取分离筛末端垂直方向加速度与水平方向加速度变化,如图3所示。
图2 马铃薯收获机分离筛三维模型图
Fig.2 Three dimensional model diagram of potato harvester separation screen
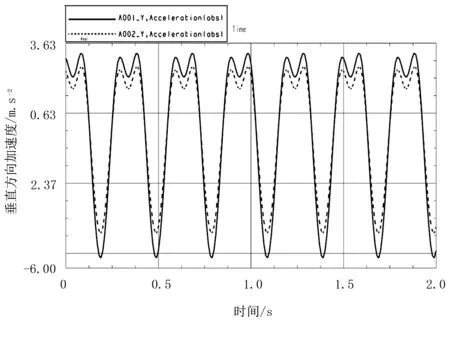
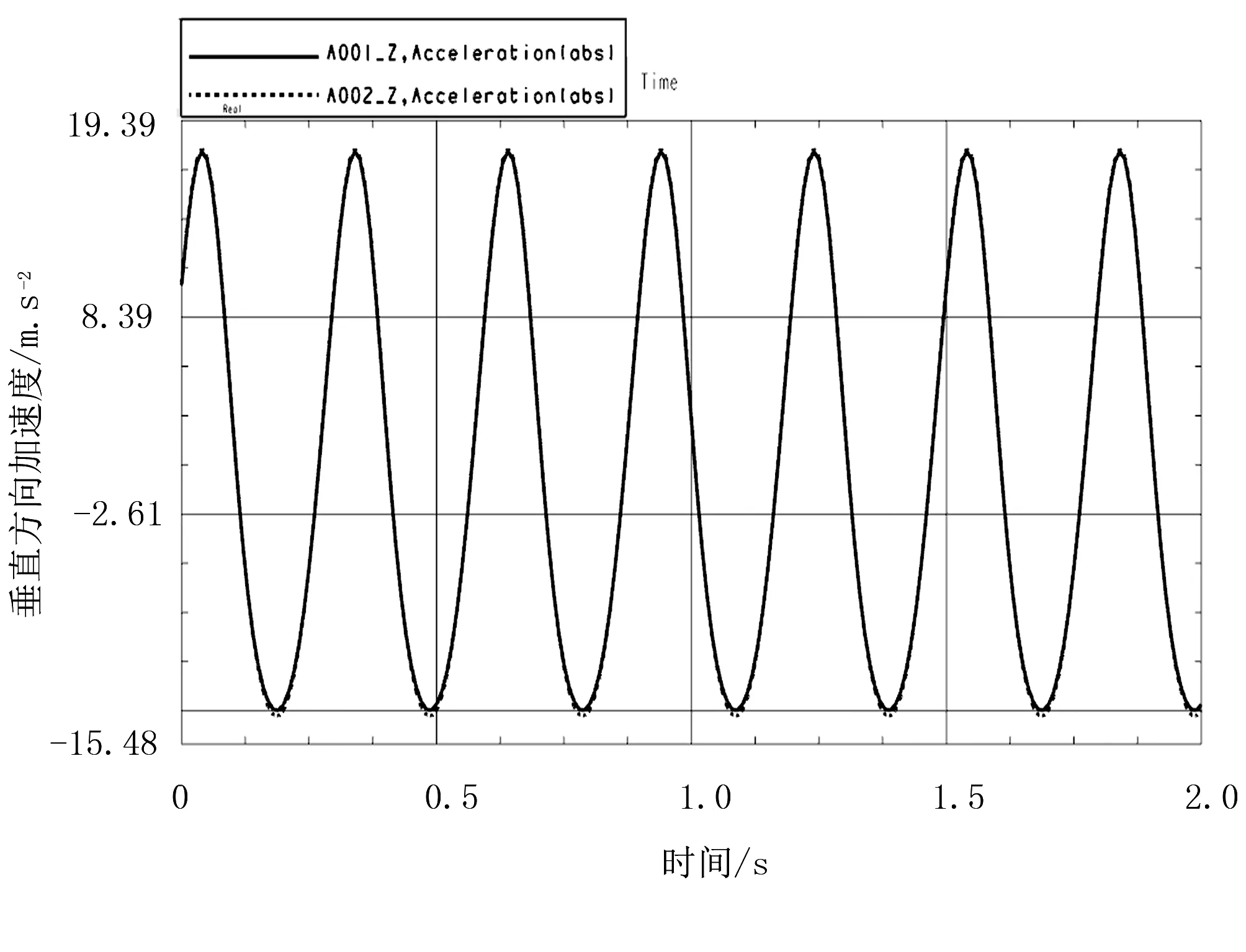
图3 分离筛测试点加速度图Fig.3 Test point acceleration map of separation screen
2 分离筛摆杆及筛条运动规律分析
马铃薯挖掘机分离筛兼具筛分与输送功能,通过试验的探究得知:马铃薯损伤主要由马铃薯与分离筛的接触碰撞及筛分时马铃薯之间相互的碰撞造成的,且马铃薯与分离筛的碰撞是损伤的主要原因。经试验研究发现:马铃薯在分离筛上的碰撞随着时间的增加而逐步增强,产生这种现象的主要原因是第二级分离筛振动增强和马铃薯在无土筛面上的接触时间过长。因此,如果能降低第二级分离筛的振动,将分离功能向第一级分离筛集中,并且减少马铃薯在分离筛上的接触时间,将会获得理想的薯土分离效果。根据分离筛的结构可知,直接影响马铃薯挖掘机第二级分离筛振动和接触时间的因素有摆杆的长度和筛条的长度,本文将针对这两个因素进行研究。
2.1 分离筛摆杆长度对第二级分离筛加速度影响
2.1.1 理论分析
由于为马铃薯挖掘机分离筛提供直接动力的部件是悬挂在两级分离筛上的4根摆杆,为了研究改变摆杆长度对第二级分离筛的筛分加速度的影响,本文将采用速度瞬心的方法进行理论推导。
由于分离筛的后摆杆直接作用于二级分离筛,因此通过改变后摆杆的相关参数来改变二级分离筛垂直方向加速度是本节研究的目标。为了探究其具体规律,设计了加长摆杆与缩短摆杆两种方案。
方案一:缩短杆长,将后摆杆缩短为前摆杆长度的1/2进行分析,如图4所示。
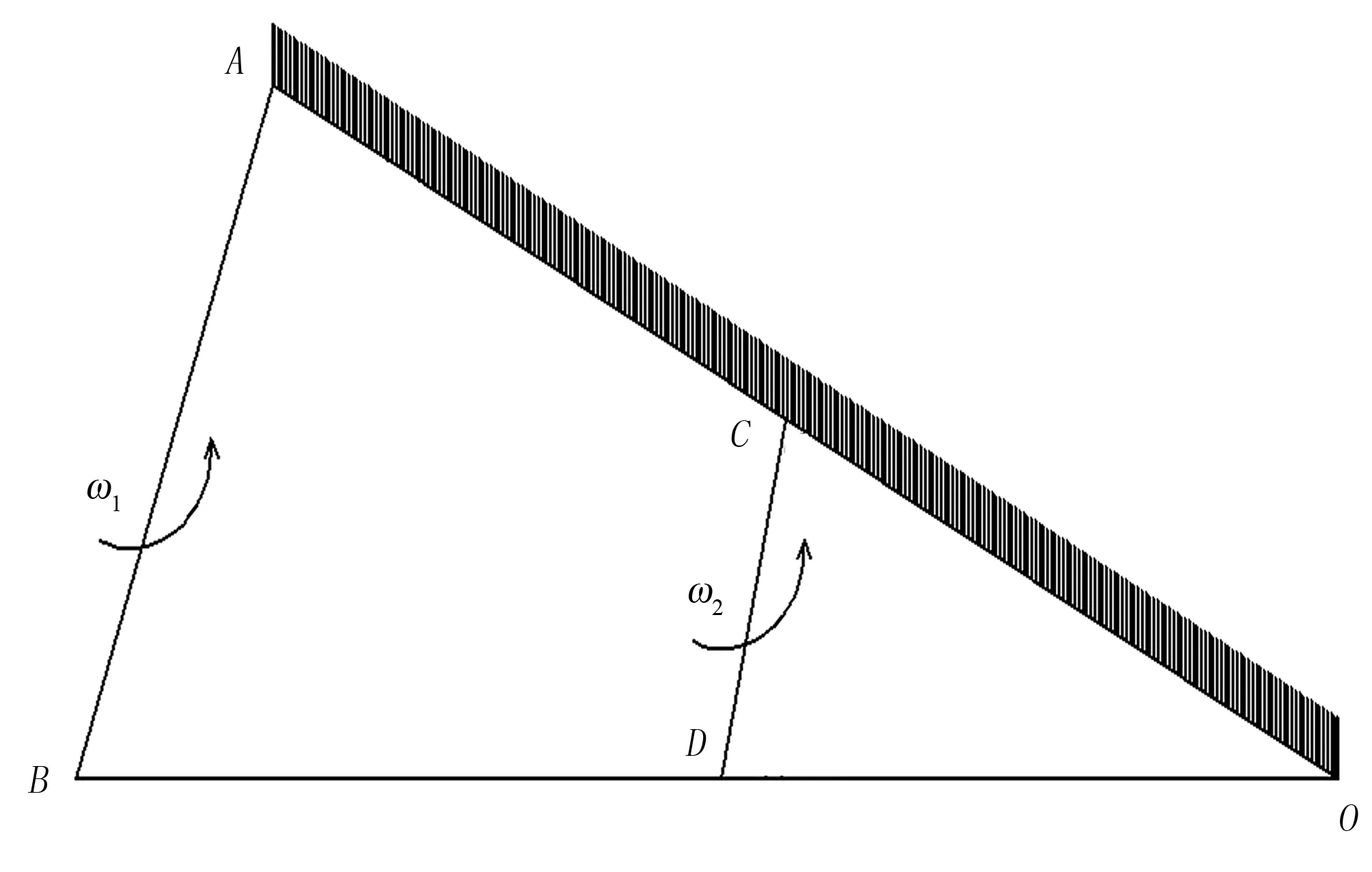
图4 分离筛前摆杆加长Fig.4 The lengthening of the front swing bar of the separation screen
设前摆杆受到的驱动角速度为ω1,前摆杆AB长度为L,为便于研究将后摆杆CD长度设为L/2,速度顺心为O点。根据以上条件得
ω1·OA=ω3·OC
ω3=ω1·(OA/OC)=2ω1
前摆杆AB和后摆杆CD的向心加速度分别为
anCD/anAB=2
前摆杆AB和后摆杆CD的切向加速度分别为
aτCD/aτAB=1
由上述推论可知:缩短二级分离筛摆杆长度,两级分离筛水平方向加速度相同,第二级分离筛垂直方向加速度是第一级的两倍。
方案二:加长摆杆的长度,其结构如图5所示。
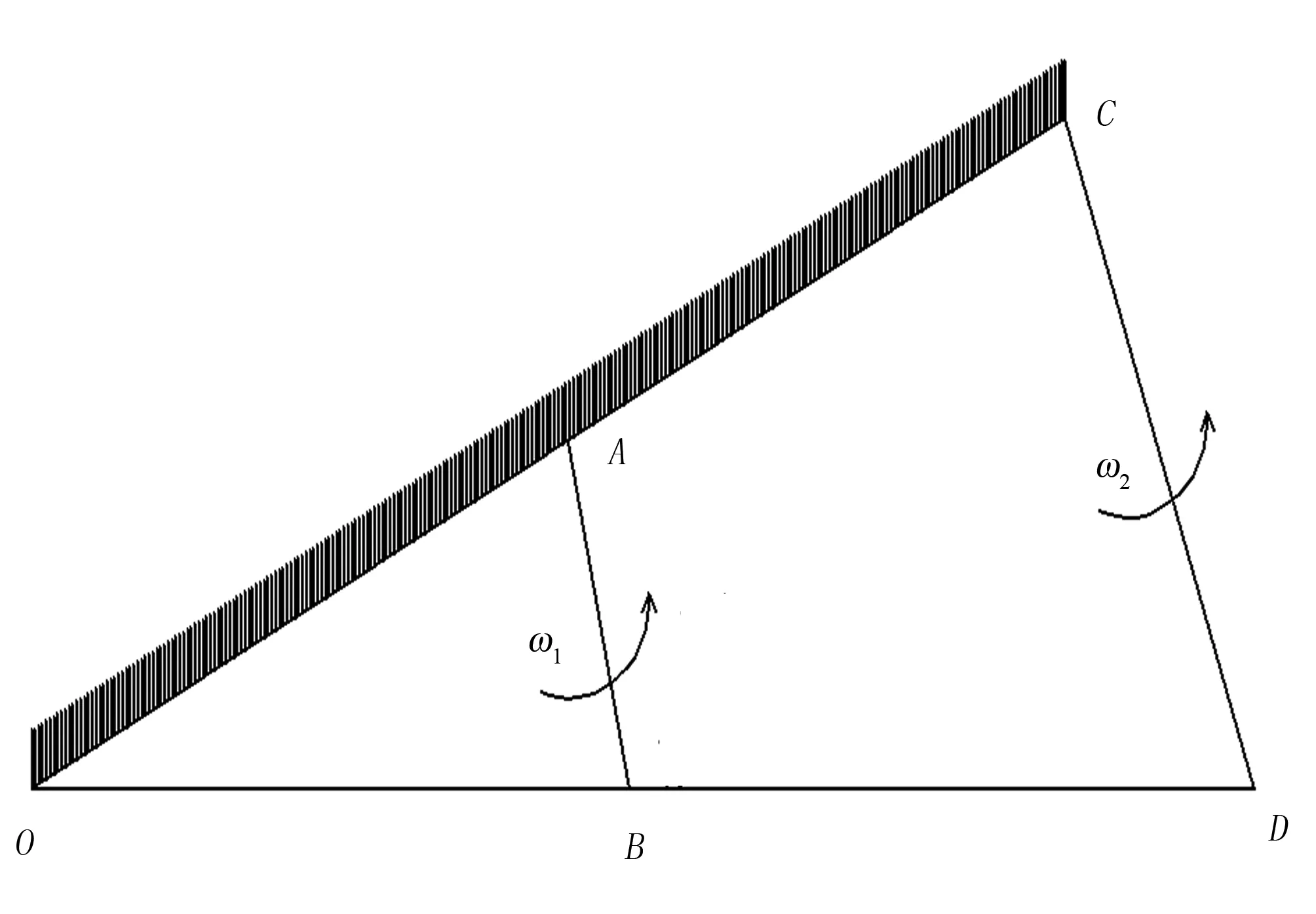
图5 分离筛后摆杆加长Fig.5 The lengthening of the rear swing bar of the separation screen
设前摆杆受到的驱动角速度为ω1,前后杆AB长度为L,则后摆杆CD长度为2L,速度顺心为O点。根据结构可得
ω1·OA=ω3·OC
前摆杆AB和后摆杆CD的向心加速度分别为
前摆杆AB和后摆杆CD的切向加速度分别为
aτCD/aτAB=1
根据以上推论得:二级分离筛垂直方向加速度是第一级向心分离加速度1/2,通过对两个方案的比较,方案二符合第二级分离筛垂直方向加速度低于第一级的设想。
2.1.2 分离规律
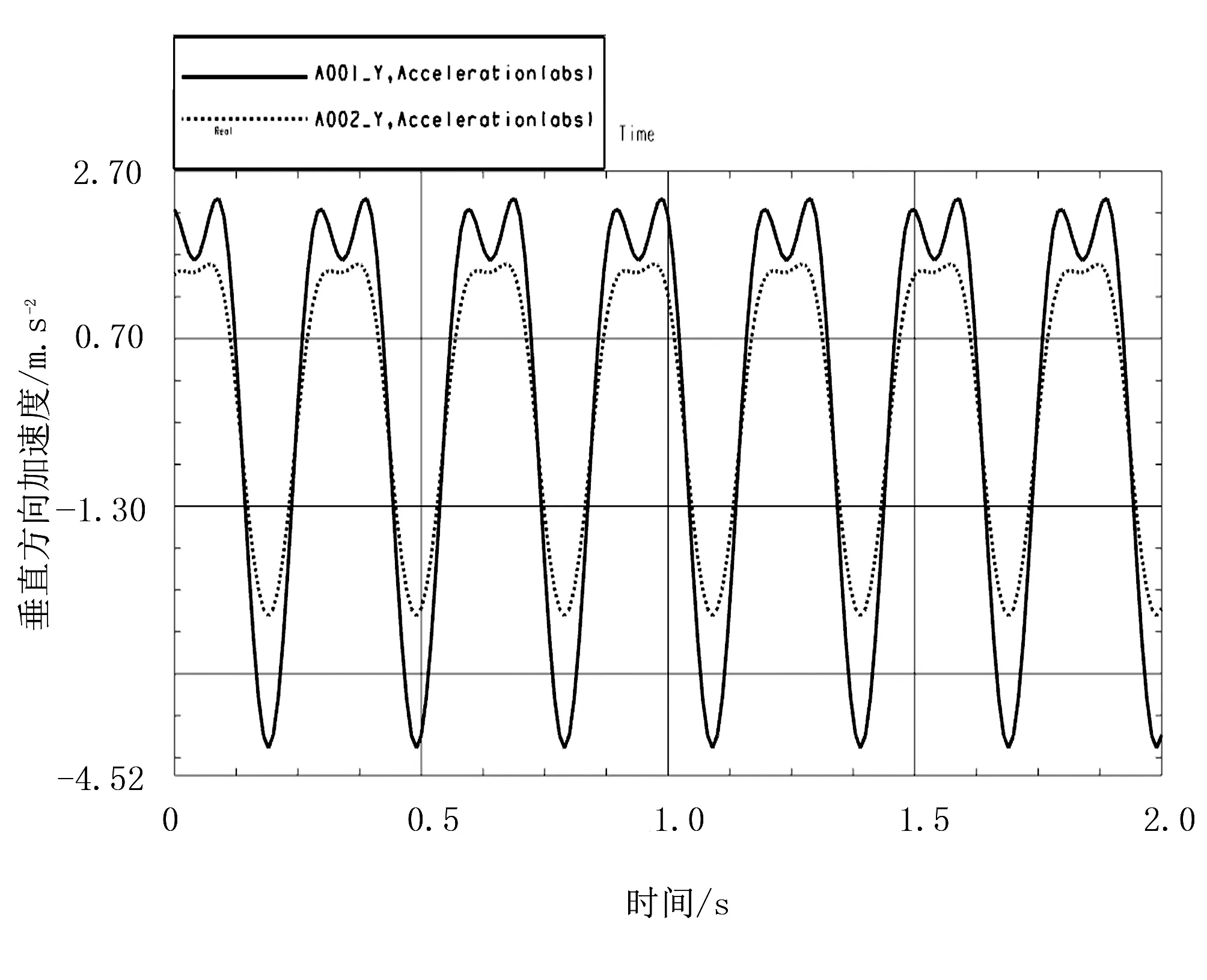
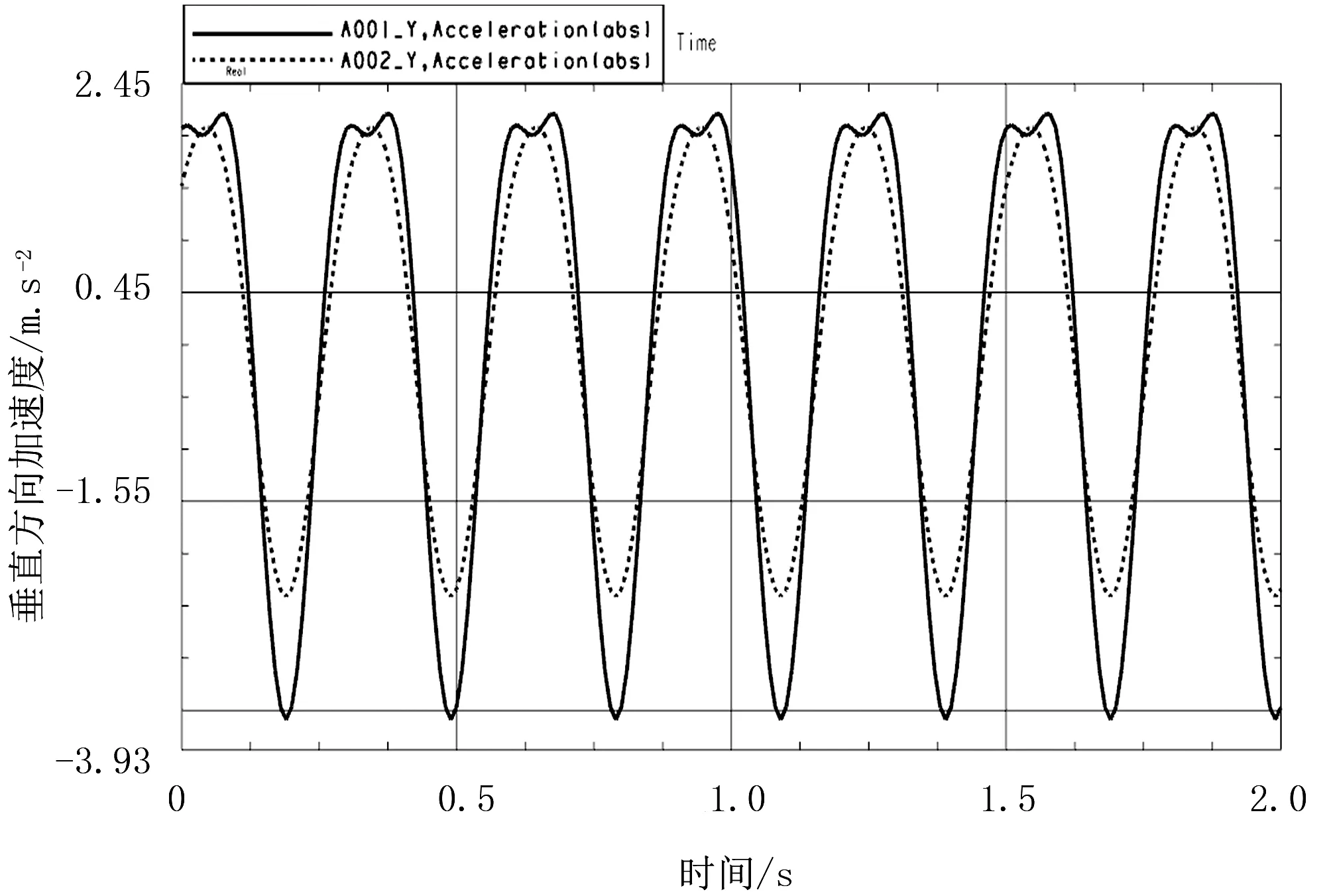
前文通过理论分析对分离筛影响做出分析,提出缩短收获机分离筛筛条长度将使得马铃薯减少在筛条上的碰撞,但缩短筛条的长度将使得分离筛分离加速度增大。为了寻求最佳的分离结果,本节将对具体的分离规律进行探索。从前文可知:通过加长分离筛摆杆的长度将减少分离筛垂直方向的加速度,因此现将摆杆的长度加长至350、400、450mm,两级分离筛筛条末端取标记点A1、A2作为加速度的测试点,其仿真效果如图6所示。
为获取摆杆长度与垂直方向加速度的具体函数关系,对图6所示两点A001与A002的垂直方向加速度的极值点进行标记,获取极值点的数据如表1所示。
(a) 350mm
(b) 400mm
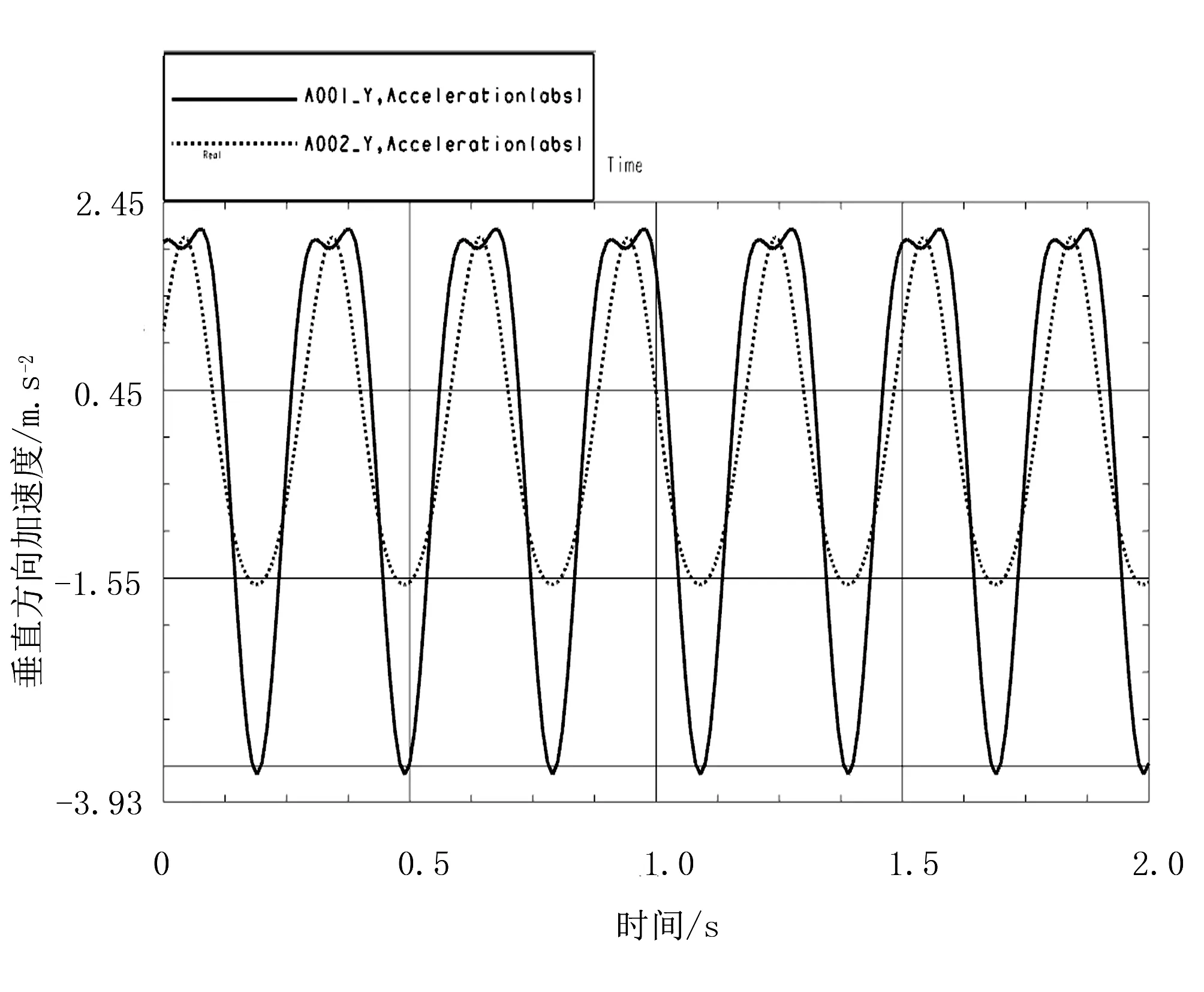
(c) 450mm图6 摆杆长度对垂直方向加速度影响Fig.6 Influence of pendulum length on vertical acceleration表1 摆杆长度改变后垂直方向加速度Table 1 Vertical direction acceleration after changing the length of the pendulum
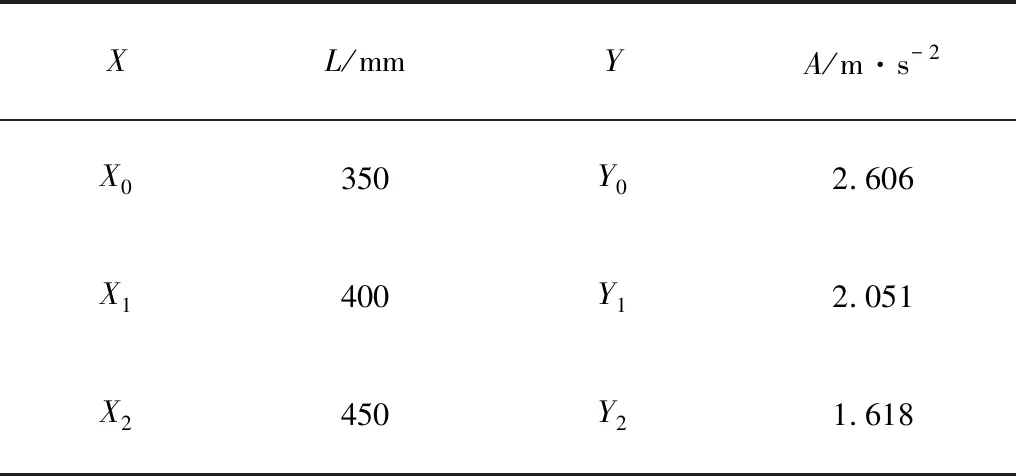
XL/mmYA/m·s-2X0350Y02.606X1400Y12.051X2450Y21.618
利用拉格朗日插值多项式将获得插值参数带入得摆杆—加速度函数,可获得分离函数为
按照相同的方法可以求得摆杆长与水平方向加速度的关系为
2.2 分离筛筛条长度对第二级分离筛加速度影响
2.2.1 理论分析
为了解决马铃薯在分离筛无土覆盖区接触时间过长的问题,将二级分离筛的筛条长度缩短(见图7),并通过理论分析对缩短后的分离性能做出分析。
由图7可知:分离筛筛条上的各点在垂直方向的运动可以视为各点绕与摆杆AB平行处摆动,当筛条的长度由D处缩短至C处时,其旋转半径缩短。由转动刚体加速度公式an=v2/R可知同一筛条上各点速度相同,当半径减小时,筛条垂直方向加速度增大。
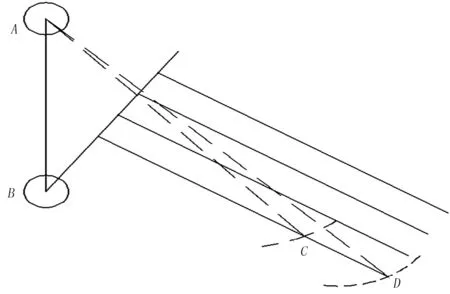
图7 第二级分离筛机构简图Fig.7 Simple diagram of second stage separation sieve mechanism
2.2.2 分离规律
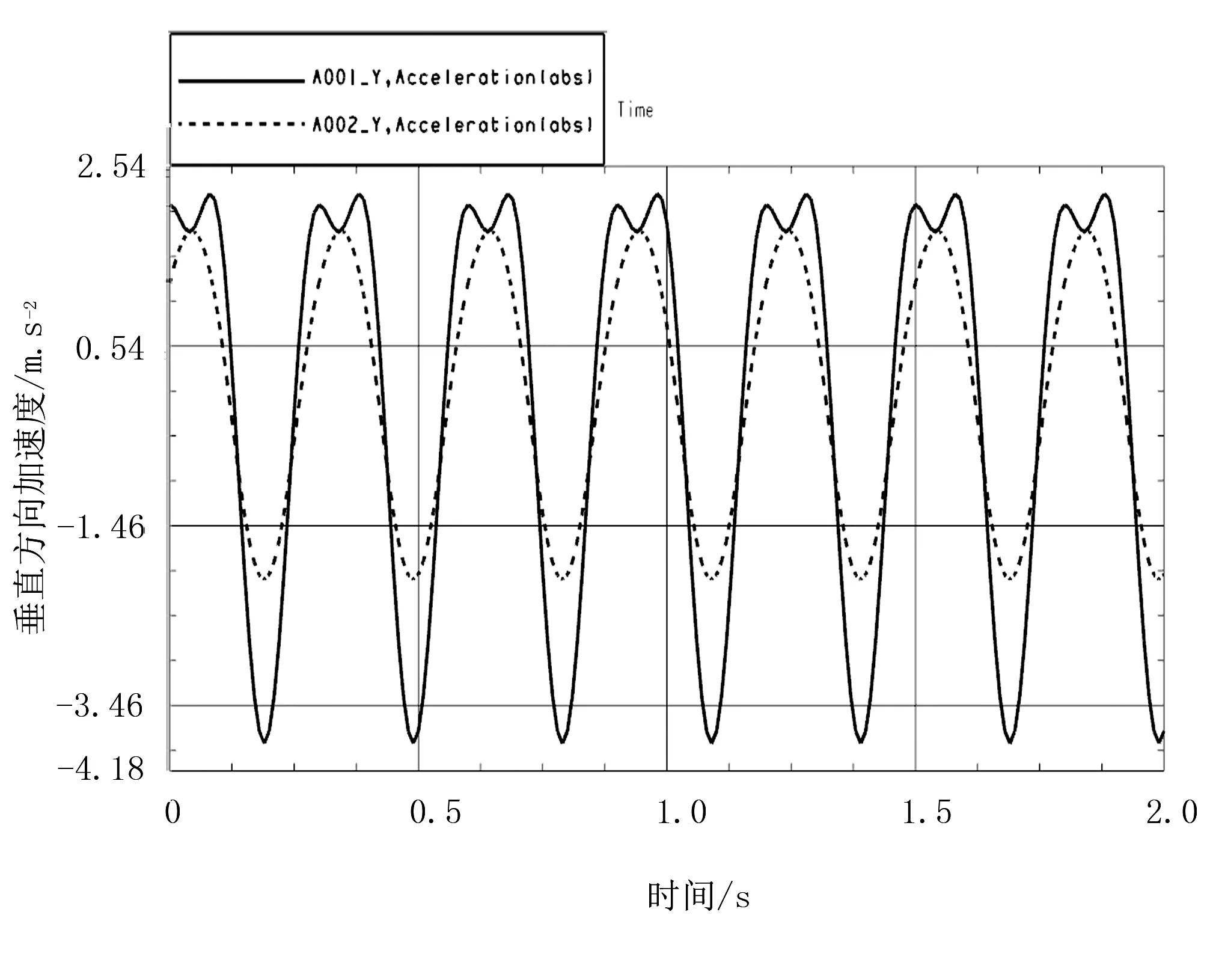
为了探究筛条长度对垂直方向加速度的影响,将摆杆长作为定量,改变筛条的长度分析其对分离加速度的影响,并仍采用插值的方式来求取函数,但与摆杆同时影响前后两级筛子不同的是改变筛条的长度将只对二级分离筛产生影响。将筛条的长度分别缩短至距二级分离筛起始处100、200、300mm,两级分离筛筛条末端取标记点A1、A2作为加速度的测试点,其仿真效果如图8所示。
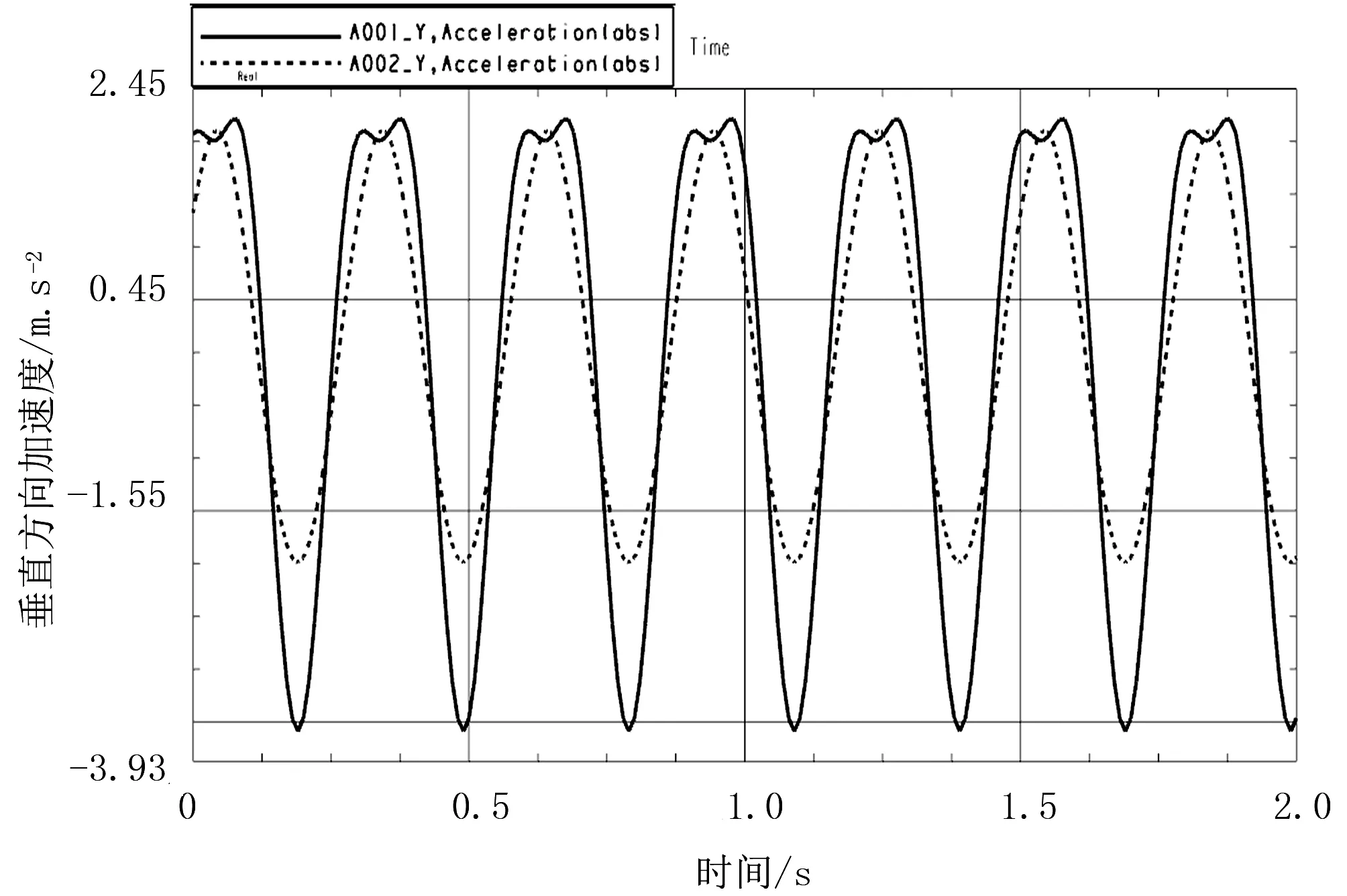
(a) 100mm
(b) 200m
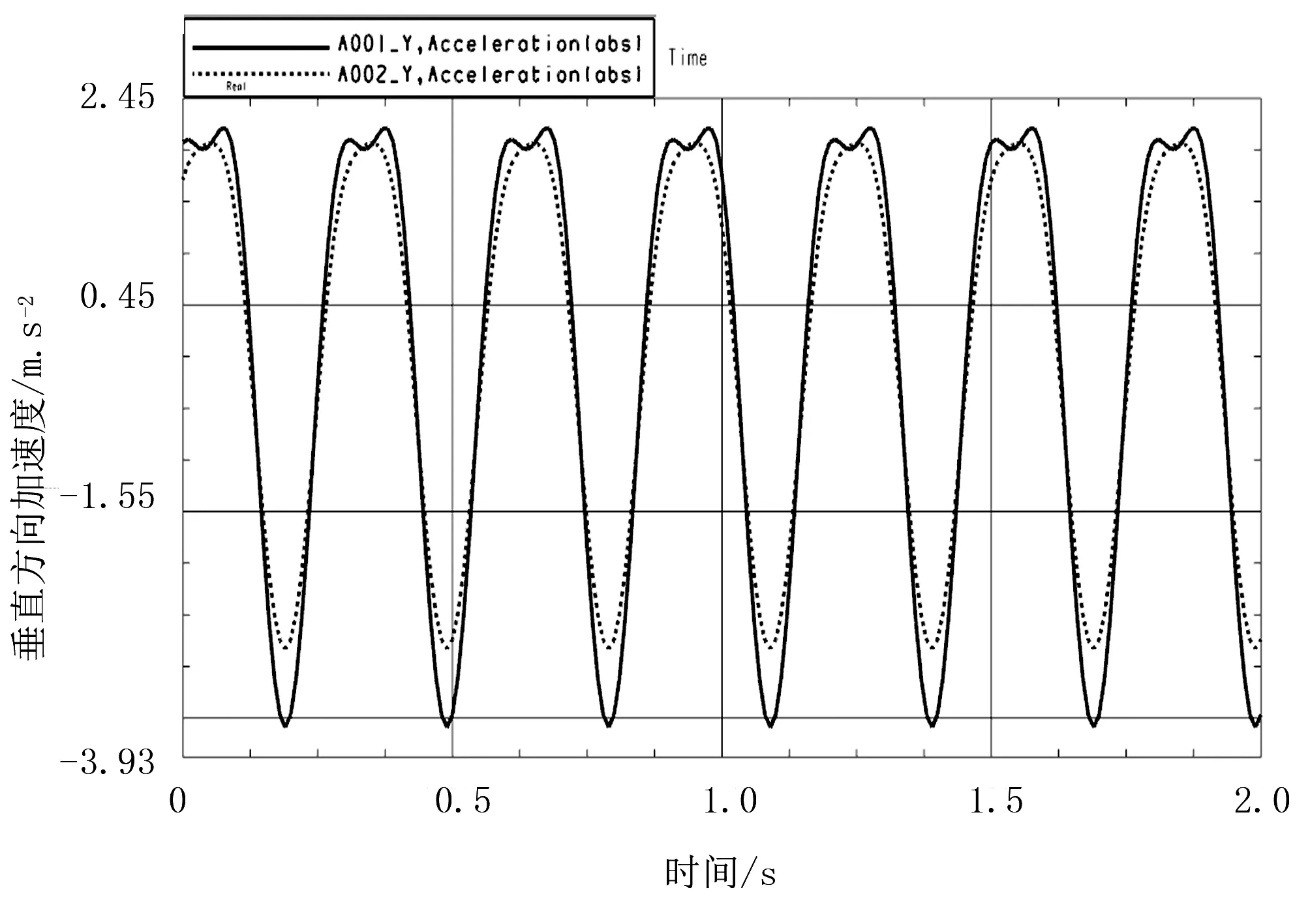
(c) 300mm图8 筛条长度改变后垂直方向加速度Fig.8 Vertical direction acceleration after the length of the screen is changed
为获取筛条长度与垂直方向加速度的具体函数关系,对图6所示两点A001与A002的垂直方向加速度的极值点进行标记,获取极值点的数据如表2所示。
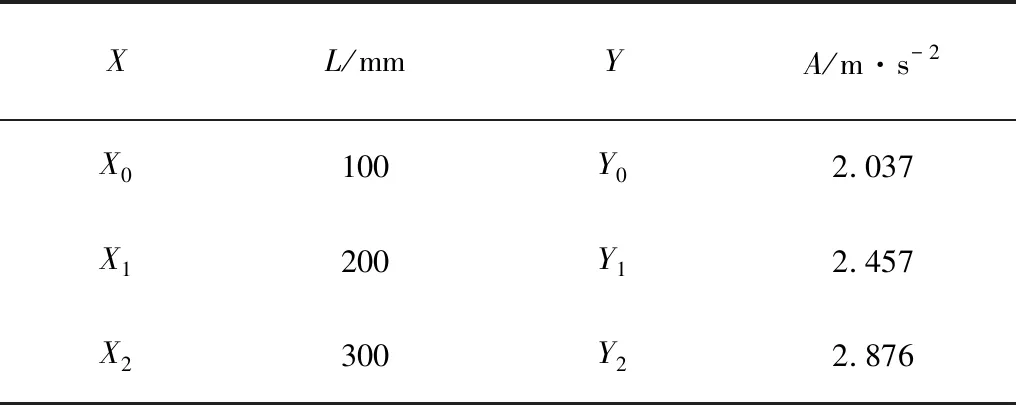
表2 筛条长度改变后垂直方向加速度Table 2 Vertical direction acceleration after the length of the screen is changed
经过计算得到如下函数式子,即
a2y=4.195x2+1.6175,x∈(x0,x2)
按照相同的方法可以求得筛条的长度与水平方向加速度的关系,根据模拟的效果可知改变筛条的长度不会对水平方向加速度产生影响,可得
a2z=14.51m/s2,x∈(x0,x2)
3 确定目标函数与边界条件
3.1 目标函数的确定
根据前文的论述获得了分离筛摆杆与一级分离筛垂直与水平方向的规律及分离筛筛条与二级分离筛垂直于水平方向加速度的规律,根据规律可得两个目标不具可度性。为获取统一的目标函数,对两个子目标函数分别赋权,获取目标的函数模型为
aymax=ψa1y+ξa2y
对于多目标函数加权因子的确定主要考虑两个目标函数的重要性和两个函数数量级的差别,由于本函数的两个分函数的本征权相同,可取对等数。因此,加权因子的确定,主要由校正权来确定,即需要确定数量级差异。由表1、表2可知:摆杆每改变一个数量级垂直方向的加速度将改变8个数量级,而筛子筛条长度每改变一个数量级垂直方向加速度将改变3.4个数量级,按此配比可得到赋权数ψ为7.02,赋权数ζ为2.98,因此目标函数为
aymax=7.02a1y+2.98a2y
筛条缩短长度和摆杆长度的交互作用对马铃薯收获机分离筛垂直方向加速度的影响如图9所示。由图9可知:摆杆的长度越长,筛条缩短的长度越短摆动分离筛垂直方向加速度越小。当摆杆长度为400~450mm、筛条长度缩短100~150mm时,加速度符合预期效果。
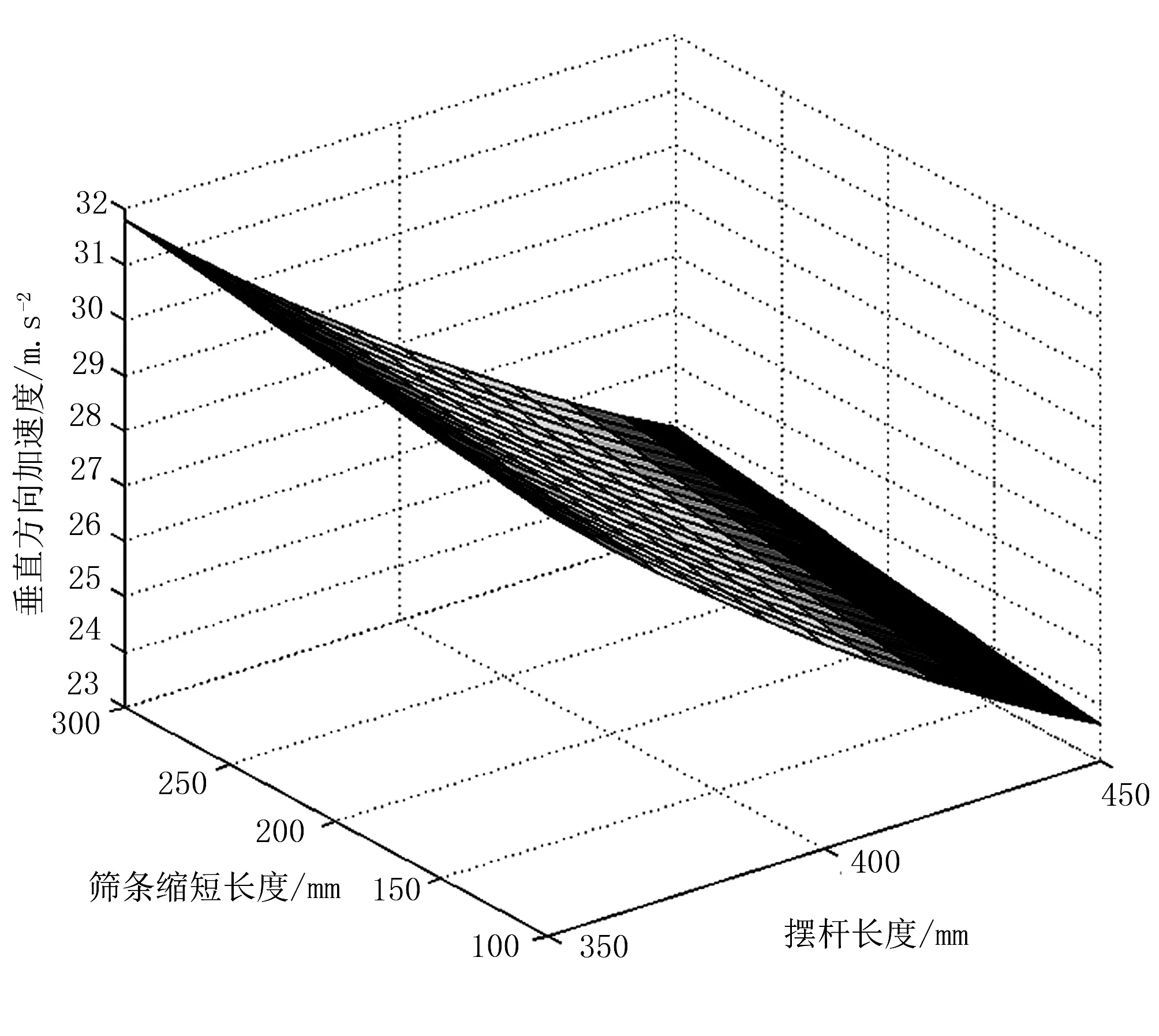
图9 摆杆与筛条的长度对垂直方向加速度影响Fig.9 Effect of length of swing bar and screen strip on acceleration in vertical direction
3.2 寻找边界要素
进行结构优化除了确立目标函数,还需要寻找边界约束条件,依据以上研究结果及相关因素,现提出如下的约束边界条件:
1)第一级分离筛垂直方向的分离能力大于第二级分离筛垂直方向的分离能力即a1y>a2y,带入函数式子可得约束条件为
2)第一级分离筛水平方向的输送能力不超过第二级分离筛水平方向的输送能力,即a1z≤a2z,带入函数式子可得约束条件为
3)第一级分离筛筛条长度与第二级分离筛筛条长度叠加应在无土范围之内,即
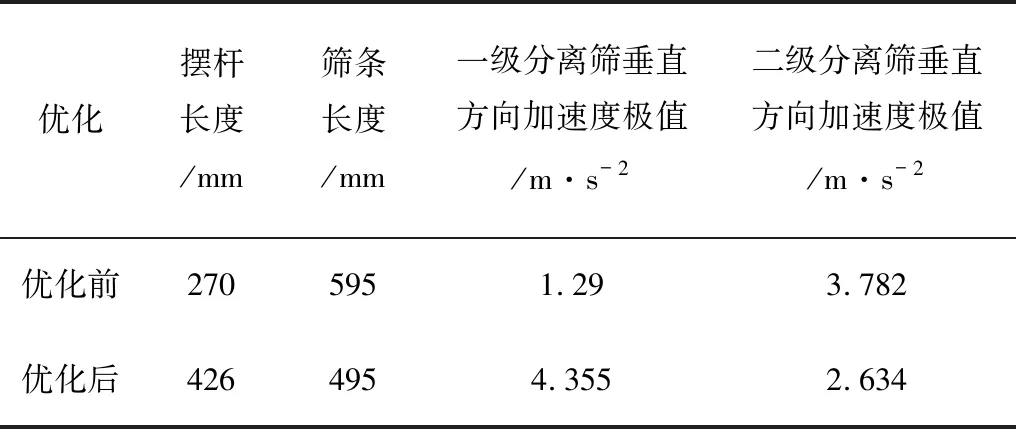
100mm 4)为确保改进后收获机不发生干涉,分离筛摆杆不能超过悬挂的极限位置,即 x1≤428mm 5)曲柄转速在合理的范围之内,即 180r/min 按照约束条件得重要性,约束边界的优先级为:1)>2)>3)=4)>5)。 综上所述,在不改变其他因素的情况下确定最终的优化模型为 由于本优化中的两个子目标函数性质相同所以不能采用乘除法,且目标函数的子函数之间也无法按照预先确定的方式进行让步,构建统一目标也不能采用统一目标函数法。因此,本文将采用协调曲线(TQSP)法进行优化。 前文在确定加权因子时已对目标函数之间的让步做出了分析,确定了最终的目标曲线及满意曲线,按照此匹配关系转化为单目标函数,此时再按照单纯型法并借助MatLab进行编程,计算得到最优结果。根据在MatLab中优化可得参数的最优结果如表3所示。 表3 分离筛结构优化结果Table 3 Optimization results of separation sieve structure 通过对摆杆和筛条长度的修改,使得第一级分离筛在垂直方向上的加速度提高且超过第二级分离筛垂直方向的加速度,改变了以往马铃薯在分离筛上振动递增的筛分方式,修改分离筛筛条的长度后使得马铃薯减少了在无土筛面上的碰撞。通过前期的试验可知:马铃薯挖掘机在曲柄转速230r/min、前进速度为2.03km/h时,明薯率可达98.94%,破皮率为0.21%。经过优化后;摆杆的长度增加到420mm,将进一步降低马铃薯的破损,提高生产率。 采用虚拟仿真技术,获取马铃薯挖掘机分离筛在不同方向上的运动规律,并按照理论分析提出的思路,对分离筛的结构做出改进。改进后的分离筛将分离功能向第一级分离筛集中,将输送功能向第二级分离筛集中,并减少马铃薯在二级分离筛上的接触时间,实现两级筛子功能分离。运用优化设计的方法,辅助使用MatLab软件获取最终的优化方案,得出实现功能所需的摆杆长度为420mm,筛条的长度是595mm。通过本文的优化,使分离筛增大了薯土分离能力,减少了马铃薯的损伤。3.3 目标函数的优化
4 结论
猜你喜欢
再生资源与循环经济(2022年1期)2023-01-04昆钢科技(2022年2期)2022-07-08昆钢科技(2022年1期)2022-04-19农机使用与维修(2022年2期)2022-02-21中国农村科技(2021年12期)2021-12-28农机使用与维修(2021年7期)2021-11-29学生天地(2020年16期)2020-08-25农民致富之友(2019年33期)2019-12-20日用电器(2019年9期)2019-09-27有色金属设计(2015年2期)2015-02-28
