
基于柔索测距装置的农机定位方法研究
2019-05-27 08:56夏聪明喻擎苍
农机化研究 2019年11期
夏聪明,喻擎苍,贾 靖,赵 晖
(浙江理工大学 信息学院,杭州 310018)
0 引言
促进农业发展、农民增收一直是近几年国家关注的重点。2004-2015年的11年时间,全国农作物耕种收综合机械化水平增长了26.3%[1]。实践表明:提高农业机械化水平,可以促进农产品的增产增收,提高农民收入,还能减少农民劳作时间,提高劳动效率[1-2]。农机自主行走可以提升田间作业的效率,降低劳动者的工作强度[3],有利于我国农业的智能化和自动化;还能提高机械作业精度,增加机械作业的时间,让劳动者免于机械重复的劳动,确保了劳动者的人身安全。传统的定位方式中,GPS定位的精度低,差分GPS价格比较昂贵,惯性导航定位存在累加误差问题,激光测距存在对准问题,视觉定位难以适应田间复杂环境。为此,研究设计了柔索长度测量装置和基于激光测距的缓冲机构,利用三角法对农机进行定位。
1 三角法定位原理分析
在田间地头固定两个立杆(定点A与定点B)。在农机上选取一固定点,用柔索将农机上的固定点分别与两个立杆相连接,且将农机与两杆抽象成质点,这样农机与地头的两个杆之间便形成一个三角形,如图1所示。
先测出两个杆之间的距离L,通过柔索测距装置测出农机固定点到两个杆之间的距离L1和L2,据此可计算出农机在田间的坐标。

图1 三角定位原理图Fig.1 The principle of triangulation
2 柔索长度测量装置设计研究
2.1 长度测量原理
柔索装置采用的柔索是直径为0.5mm的不锈钢钢丝绳,强度高、质量小。实验测量出100m的钢丝绳平衡力为16N,拉断力为215N。在长度测量装置中,柔索的一端连接在地头一定点,另一端经过长度测量装置与农机相连。本文采用的是增量式光电旋转编码器,在编码器的输出轴上套上一个固定直径的滚轮,将柔索缠绕在滚轮上;农机在田间作业时,滚轮会随着机器的行走带动编码器旋转,对编码器的脉冲进行计数,即可得出机器在田间行走的距离。

2.2 长度测量核心部件
本装置采用的是600线编码器,旋转1圈可输出600个脉冲,可通过ArduinoMega 2560对编码器输出的脉冲进行计数。测试前,将Arduino的数字引脚2与3连接编码器的A相与B相输出线,如图2所示。
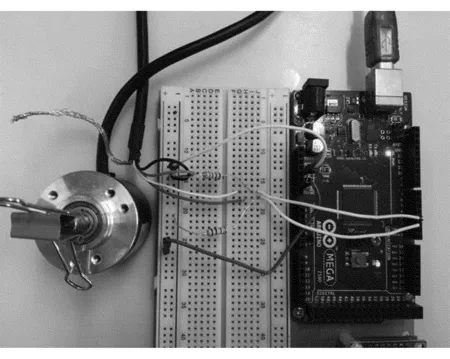
图2 Mega 2560读取编码器脉冲Fig.2 Using Mega2560 to read the encoder pulse
在Arduino程序[4]中,用中断的方式对脉冲计数,使用中断的优点是中断响应时间快,不占用资源,主程序同时还可以完成其它任务。Mega2560的2号引脚和3号引脚可作为中断引脚。当Arduino检测到A通道有变化, 程序就立刻跳转到中断函数,中断的触发方式是电平变化,中断函数会在上升沿和下降沿都会被调用,B通道的变化也是同样的道理。中断函数的执行流程如图3(以A通道为例)所示。
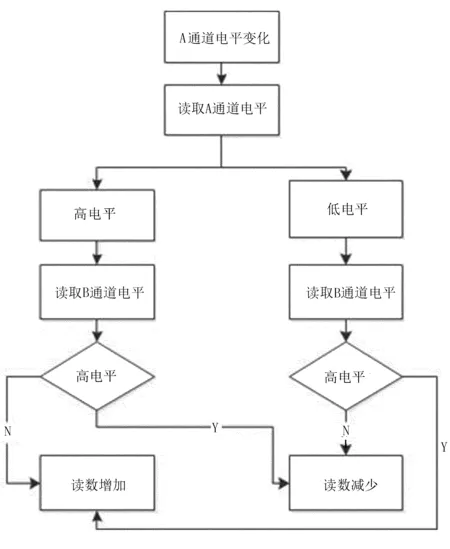
图3 中断函数执行过程Fig.3 Interrupt function execution process
在实际的应用中,对于编码器脉冲的读取肯定会出现少读或误读的情况,为了检测脉冲的读取误差,用步进电机通过联轴器带动编码器转动固定的圈数,计算Arduino读取的脉冲数并与理论情况的脉冲数比较。进行50次测量,取平均值,如表1所示。
表1 编码器读取脉冲数与实际脉冲数
Table 1 The number of pulses read by the encoder and the number of actual pulses

当编码器转动500圈以下时,检丢的脉冲数逐渐变多;到了500圈以后,检丢的脉冲数稳定在15个左右,脉冲丢失率在0.002 5%以内。
2.3 纳线机构研究设计
完成距离的测量需要有一个纳线机构对柔索进行收放线的控制,其必须可以自动进行绕线,以保证柔索能均匀地缠绕在绕线轴上。
如图4所示:57步进电机旋转带动连接在其上面的绕线轴转动,同时42步进电机会协同转动,通过联轴器带动其上面的丝杆转动,进而推动其上面的螺母在丝杆上来回运动。为此,设计了一个推动装置,套在螺母上,随着螺母的来回移动而移动,此装置负责将线来回推动,使得绳索在绕线轴上缠绕1圈,装置将绳头向前推动,使绕线均匀缠绕在绕线轴上。为了防止推动装置倾斜,在旁侧用一固定光杆使推动装置保持稳定。控制电机的芯片是Arduino Mega2560, 步进电机驱动模块采用的是双路输出的DRV8825步进电机驱动器。纳线机构工作流程如图5所示。

图4 收纳线装置结构示意图Fig.4 The structure of the receiving line device
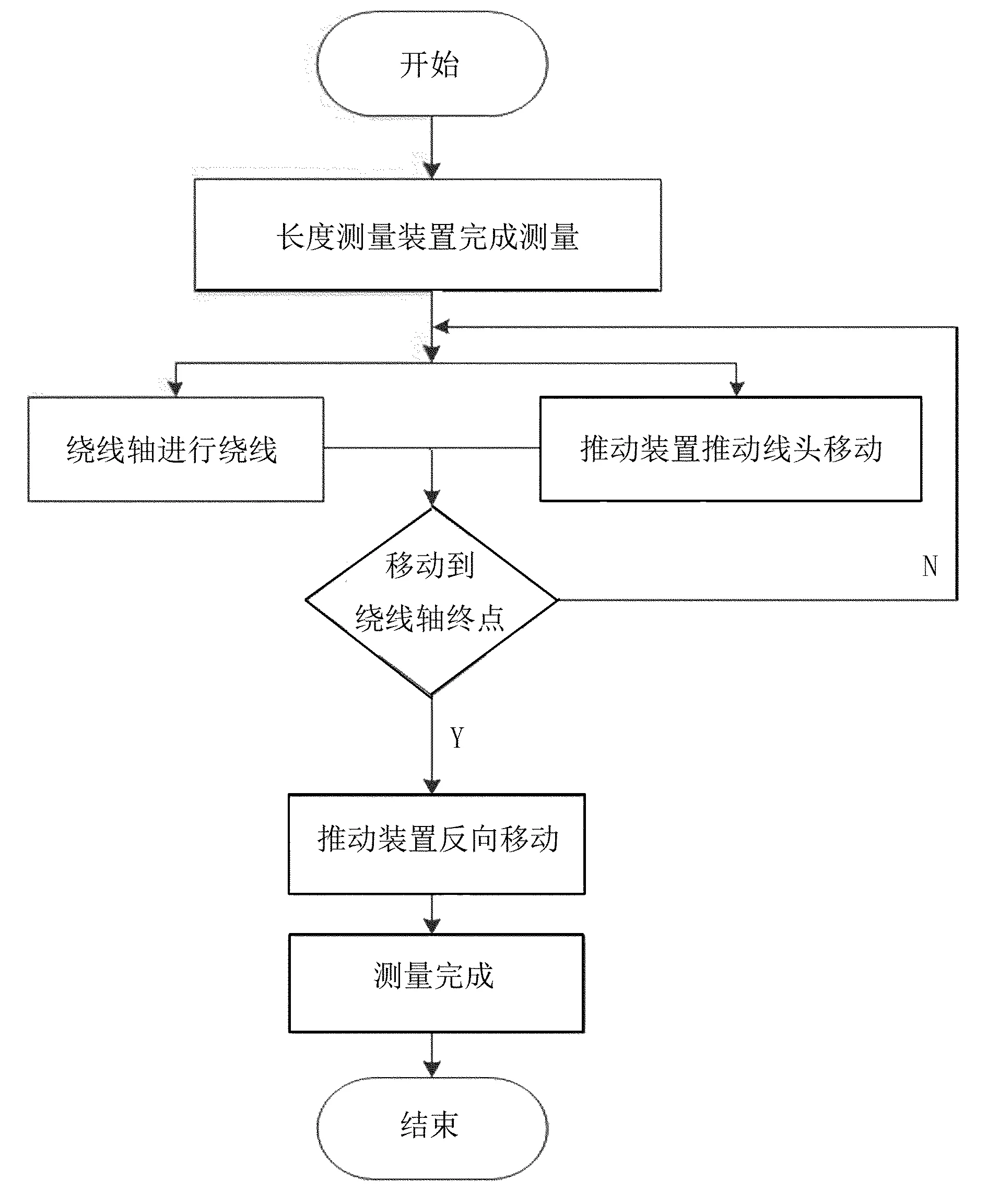
图5 纳线机构工作流程图Fig.5 Working process of nanowire mechanism
3 基于激光测距的缓冲机构设计
3.1 缓冲机构总体设计
田间作业时,机器摆动导致柔索突然张紧或松弛,造成柔索断裂或对装置拉力过度。增加弹簧缓冲,用激光测距传感器测量绕线点的偏移。柔索测距如图6所示。柔索的一端固定在立杆上,在编码器上套上带有凹槽的滚轮,柔索在滚轮上饶1圈后,通过缓冲的滚轮,纳线机构上缓冲滚轮用铝杆支撑。
3.2 缓冲位移测量
激光测距传感器VL53L0X采用飞行时间原理实现测距应用,使用I2C接口进行设备控制和数据传输,激光测距传感器一次测量可在30ms内完成。对VL53L0X进行测试,将Arduino的[5]SDA与SCL和VL53L0X的SDA、SCL相连接,Arduino的3.3V引脚连VL53L0X的VIN,两者的GND连接。

图6 柔索测距详细图Fig.6 Flexible cable distance measuring structure
为了测试激光测距传感器的准确性及稳定性,在50、100、150mm的距离上每隔1s进行1次测量,得到500组数据,从得到的数据中选取100组进行分析,如图7所示。
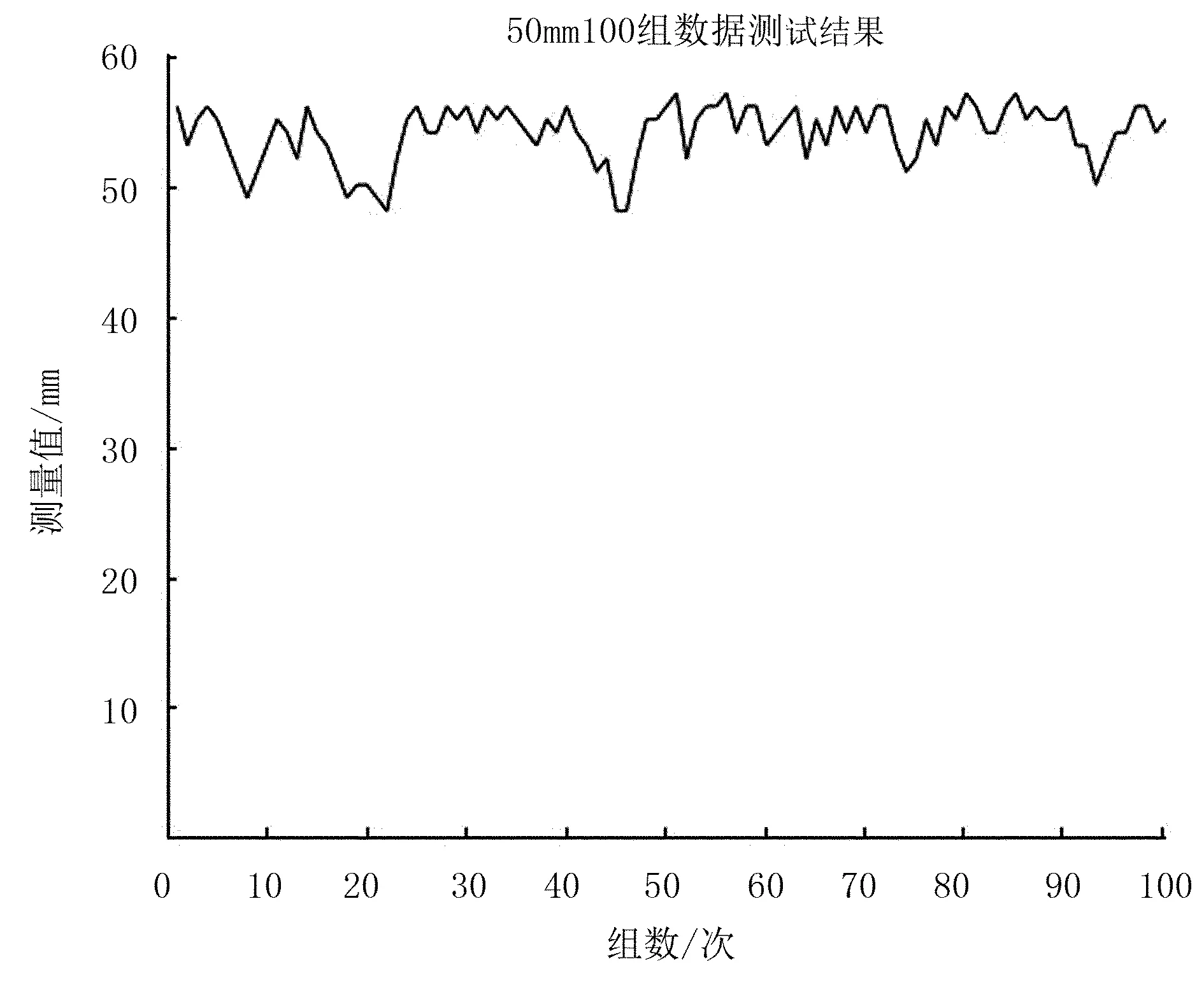
(a) 50mm

(b) 100mm
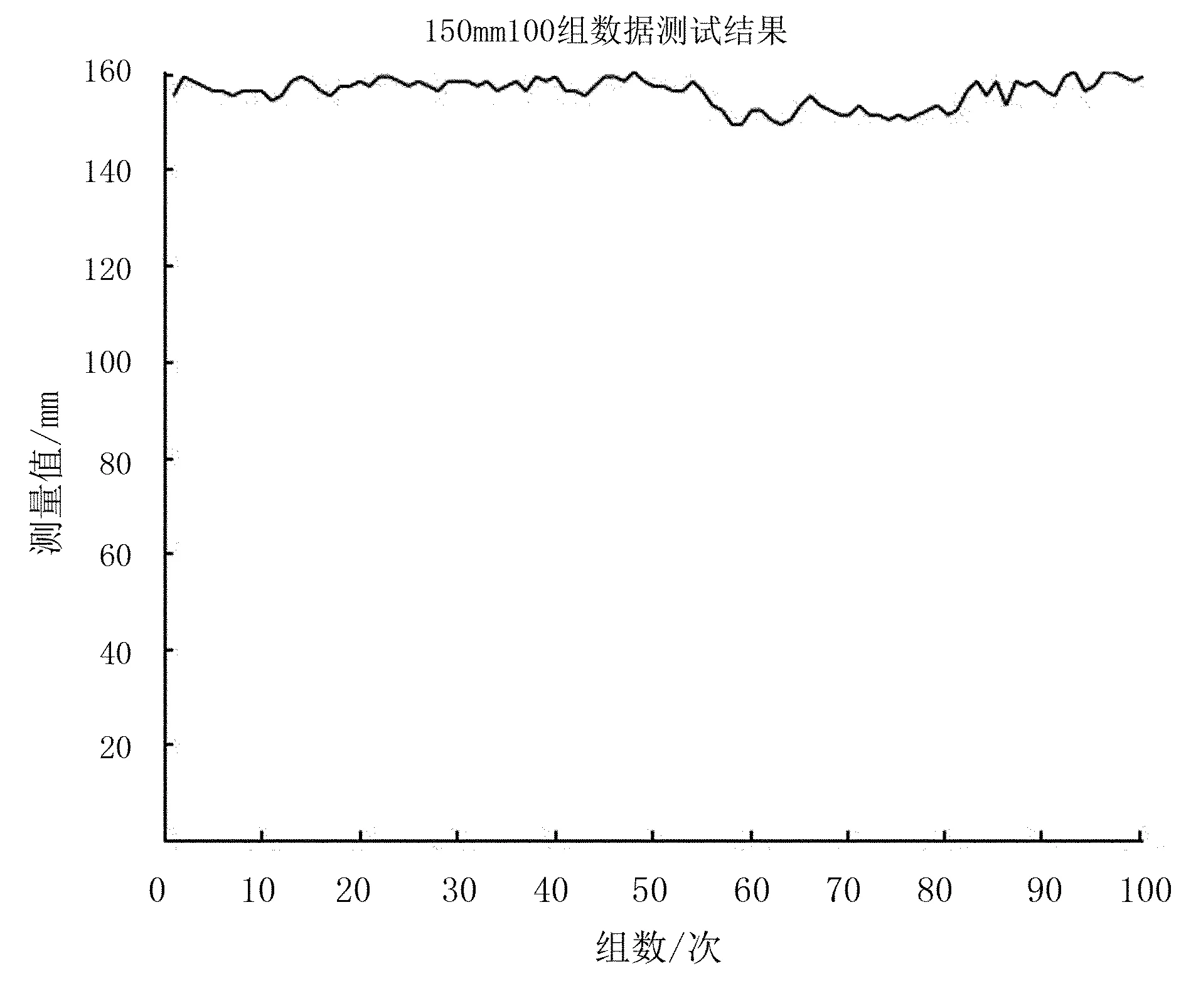
(c) 150mm

(d) 200mm图7 不同距离下VL53L0X测试数据Fig.7 VL53L0X test data at different distances
对上述数据进行分析,统计结果如表2所示。由表2发现:测量距离为200mm时最大误差达到了10mm,50mm时平均相对误差为7.9%,难以满足田间定位高精度的要求,因此要用卡尔曼滤波的方法进一步减少误差,提高测量精度。

表2 VL53L0X测试数据统计结果Table 2 VL53L0X test data statistical results
对上面测量的数据进行卡尔曼滤波处理后,如图8所示。
对卡尔曼滤波后的数据进行分析,结果如表3所示。由表3可见:无论是均值还是平均相对误差较卡尔曼滤波之前的数据都更加精确;测量误差控制在3%以内,满足对缓冲装置伸缩位移进行测量的需求。

(a) 50mm

(b) 100mm

(c) 150mm

(d) 200mm图8 卡尔曼滤波后数据Fig.8 Data after Calman filtering表3 卡尔曼滤波后VL53L0X测试数统计结果Table 3 Statistical results of VL53L0X test number after Calman filtering
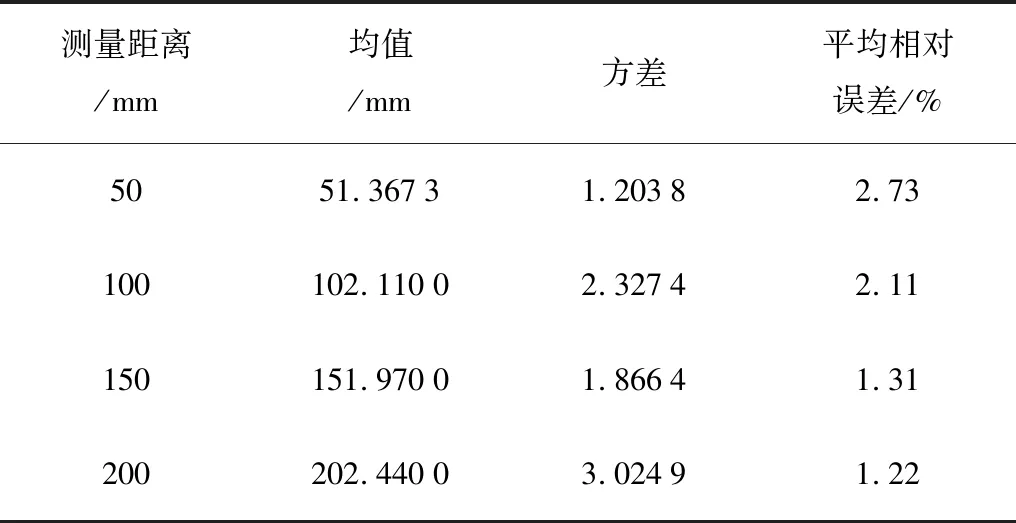
测量距离/mm均值/mm方差平均相对误差/%5051.36731.20382.73100102.11002.32742.11150151.97001.86641.31200202.44003.02491.22
4 定位试验结果与分析
长度测量装置得到了农机与定点之间的距离,缓冲机构测量出了冲击带来的偏移的位移,将以上数据通过Arduino得到,通过I2C将数据传给树莓派,由树莓派根据建立的坐标系计算出农机的坐标。坐标系以定点A与定点B的中心点作为坐标原点,如图9所示。
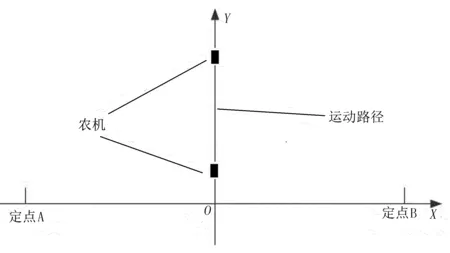
图9 定位坐标系Fig.9 Positioning coordinate system
试验时,手动拉着装置沿Y轴行走,得到的距离即为Y轴坐标。在1~10m的距离上每隔1m输出一次坐标值,进行50次试验,结果如表4所示。
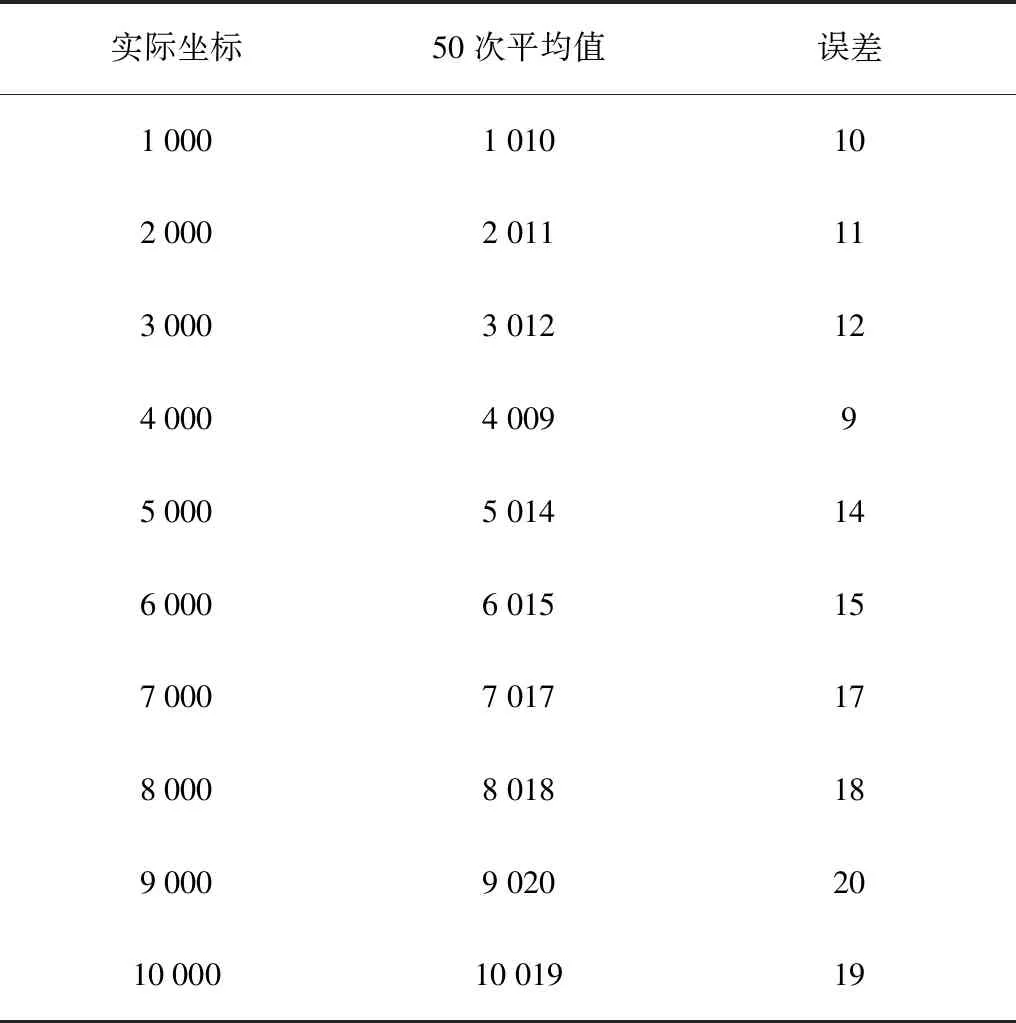
表4 不同测量点距离值Table 4 3Distance values of different measuring points mm
通过表4可以看出,该方法的定位误差在20mm以内。这表明该方法可靠、精确。
5 结论
研究了基于柔索测距装置的农机定位方法。通过读取编码器脉冲计算柔索长度,设计纳线机构进行收放线的控制。利用激光测距芯片对缓冲机构伸缩位移进行测量。编写了Arduino程序,读取了激光测距传感器的测量数据,用卡尔曼滤波的方法对数据进行了处理,滤波后的数据最大平均相对误差为2.73%。对该方法进行了定位试验,结果表明:定位误差小于20mm,适用于农机田间定位。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
网络安全与数据管理(2022年1期)2022-08-29
锻压装备与制造技术(2021年5期)2021-11-13
北京航空航天大学学报(2021年7期)2021-08-13
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
制导与引信(2017年3期)2017-11-02
电脑知识与技术(2016年7期)2016-05-19
