
穿透毛玻璃的可见光成像系统
2019-05-24 06:37李成勇应春霞胡晶晶
应用光学 2019年3期
李成勇,应春霞,胡晶晶
(重庆工程学院 电子信息学院,重庆 400056)
引言
毛玻璃也叫雾面玻璃、防眩玻璃等,是用金刚砂等磨过或以化学方法处理过的一种表面粗糙不平整的半透明玻璃,毛玻璃表面不平整,光线通过毛玻璃被反射后向四面八方射出去,因为毛玻璃表面不是光滑的平面,使光产生了漫反射,折射到视网膜上已经是不完整的像,于是就看不见玻璃背后的图像。毛玻璃对于不同光波段的成像影响差别比较大,常见的成像光波段有可见光、紫外光、红外光。紫外光波长较短,吸收大,穿透深度短,常用于透射皮肤等物质成像。毛玻璃因为有水等少量杂质,紫外光相对于可见光在穿透毛玻璃时有着较高的吸收,因此穿透毛玻璃成像选择透射率高的可见光,毛玻璃对可见光而言表面平整,吸收弱,折射率低。
穿透毛玻璃成像技术,是通过光电图像传感器捕捉视频图像,进行图像信息采集,可以获取人类视觉上看不到的图像信息,让更多的潜在信息被捕捉到。获取到的图像信息可能由于采集环境影响,或多或少有部分缺失,通过计算机图像处理软件,后期加工处理优化,使图像接近于真实。因此,应用光电成像技术可以让摄像头成为识别更广的“人眼”,获取更多的人眼无法分辨的信息,与计算机结合,把捕获到的图像信息快速存贮显示[4],弥补人视觉短暂的接受能力,达到“过目不忘”。
为了有效应用光电图像技术,针对可见光成像原理,本文设计了CMOS成像系统,在成像系统中加入辅助照明,在去除红外光的影响条件下,对可见光成像,采集到的图像采用快速迭代图像增强算法进行处理,实现透过毛玻璃对目标物体成像。
1 系统方案的选择与描述
目前,光电图像传感器应用比较广泛,主要有两类:电荷耦合器件(即CCD)和互补金属氧化物半导体图像传感器(即CMOS)。CCD图像传感器集成度比较低,在应用时需要加外部辅助电路,生产成本高,内置图像采集处理芯片是专用芯片,传感器体积比较大。而CMOS图像传感器不需要外部辅助电路,生产成本相对较低,内置图像采集处理芯片是通用芯片,传感器体积比较小,应用方便。因此本系统选用CMOS图像传感器作为成像系统的图像采集器件。
可见光成像系统主要有CMOS成像系统和计算机图像采集处理两部分,系统结构如图1所示。毛玻璃与目标物之间的最远距离为5 cm,两者对齐,成像系统与毛玻璃之间的距离为 20 cm~25 cm。 CMOS成像系统把穿透毛玻璃的目标物所成的像进行采集,发送图像到计算机进行增强算法优化处理。

图1 可见光成像系统结构框图Fig.1 Structure block diagram of visible light imaging system
CMOS 成像系统电路结构如图2所示。主要有时序发生控制电路、驱动电路、图像传感器CMOS、A/D转换电路、同步信号发生、A/D转换电路。
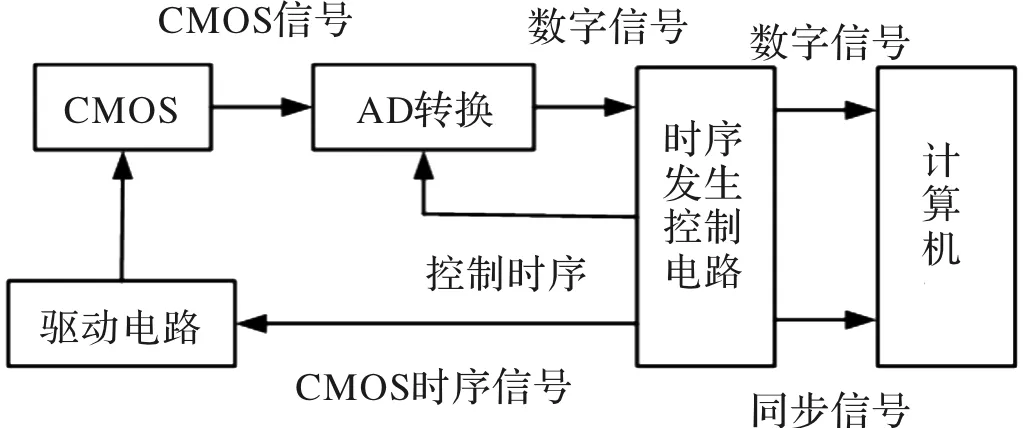
图2 CMOS 成像系统电路结构Fig.2 Circuit structure of CMOS imaging system
时序发生电路输出CMOS工作所需要的时序;驱动电路驱动CMOS工作;图像传感器CMOS将光信号转换为电信号,然后逐个像素输出;A/D转换电路对CMOS信号数字化。
同步信号产生控制CMOS信号采样的时序,从而对CMOS输出信号进行精确采样,减小噪声和误差。
CMOS信号经A/D转换后的数字信号和由时序发生电路提供的同步信号共同组成一组并行信号,然后通过数据线输出到图像处理及显示部分,由后续电路对信号进行处理和显示。
2 理论分析与计算
2.1 采集与控制部分分析
摄像头主要由电脑USB端供电,当电路板上信号灯亮起,则表示电源接通,可开始正常工作,用MATLAB编写程序进行控制。发出指令后,摄像头开始拍照,并将摄取的图片传回电脑端,摄像头参数如表1所示。
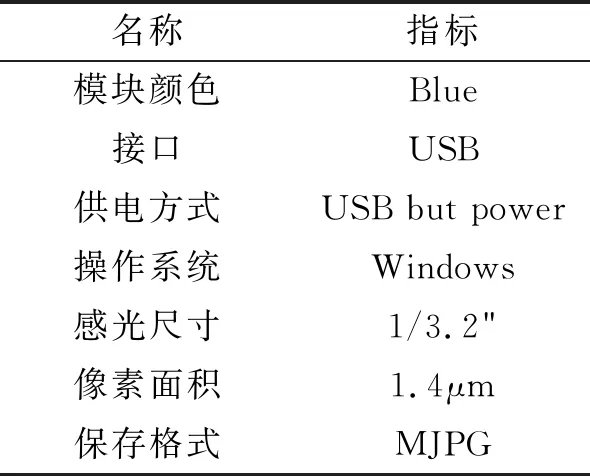
表1 摄像头参数
关于采集摄像头其他参数要求:
1) 自动对焦镜头,感光器像素为800万。
2) 成像距离,建议是3 cm~30 cm,使用距离最佳。
3) 免驱动,直接插上就会自动装驱动, 标准UVC免驱协议。
4) USB 2.0摄像头,建议使用1 m以内的线,尽量不要太长,以免影响传输信号。
2.2 迭代图像增强算法
图像采集过程中由于光照太强或不足都会影响获取的图像质量,对显示和分析图像造成困难,一般对采集到的图像进行增强操作。
一副图像S(x,y)可以分解成反射图像R(x,y)和亮度图像L(x,y),其原理如图3所示。
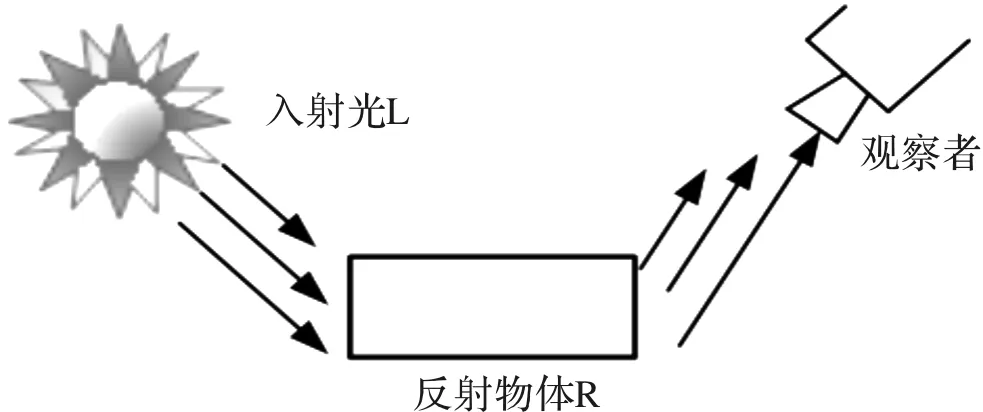
图3 图像构成Fig.3 Image composition
由图3可知,进入CMOS成像系统中的图像用下式表示:
S(x,y)=R(x,y)·L(x,y)
(1)
式中:L(x,y)是入射光图像,这个参数决定图像像素能够达到的动态范围;R(x,y)是物体对光的反射属性,是内部属性;S(x,y)是反射光图像,即采集到人眼能够看到的图像。求解S(x,y),采用近似估计方法计算,处理过程如图4所示。

图4 图像处理过程Fig.4 Image processing process
由此得出图像处理算法公式为
(2)
把公式进行变换后得:
r(x,y)=log30S(x,y)-log30[F(x,y)*
S(x,y)]
(3)
式中:r(x,y)是输出图像;*表示卷积运算;F(x,y)是中心环绕函数,其计算公式为
(4)
式中:C是中心环绕尺度系数;λ表示一个尺度系数,取值满足以下条件:

(5)
从以上公式中可得出,卷积是计算空间中的照度图像,表示估计出图像像素点与周围加权平均的照度变化。去掉其照度变化,只保留反射属性,达到图像增强效果。
可见光成像系统采集到的图像由于阴影遮挡和光照不均导致失真较大,采用改进迭代图像增强算法进行处理,效果更好。
在(1)式中L(x,y)是亮度图像,一般在原始输入图像中,按照一定路径或规则选择一些像素点,这些像素点就是估计的亮度图像。由于选择路径不同,亮度图像也不一样,图像增强效果会有差异,因此选择亮度图像的像素点很关键。为了避免某一点亮度变化过大,采用迭代图像增强算法,公式为
(6)
(7)
式中:Δl表示单点的亮度差;max表示像素点最大值。经过n次迭代后,rn+1(x,y)就是增强图像亮度后的输出值。
3 电路与程序设计
3.1 硬件设计
依照光电图像处理系统结构,设计选用图像感光器元件为CMOS成像系统以及后端读取和处理电路,摄像头主要由电脑USB端供电,当电路板上信号灯亮起,则表示电源接通,可开始正常工作,用MATLAB编写程序进行控制。发出指令后,摄像头开始拍照,并将摄取的图片传回电脑处理部分,由MATAB软件编程实现,穿透毛玻璃的可见光成像系统电路实物图如图5所示。

图5 可见光成像系统电路实物图Fig.5 Physical circuit diagram of visible light imagingsystem
3.2 程序设计
首先对系统进行初始化,进行信号检测,选用800万像素的感光器,连接到自行设计的电路板上,由计算机USB端口5V电压直接供电,利用MATLAB软件编写程序,对电路板芯片发出拍照指令,芯片控制摄像头摄取照片,并传回计算机,采用迭代图像增强优化算法进行处理,算法流程如图6所示。
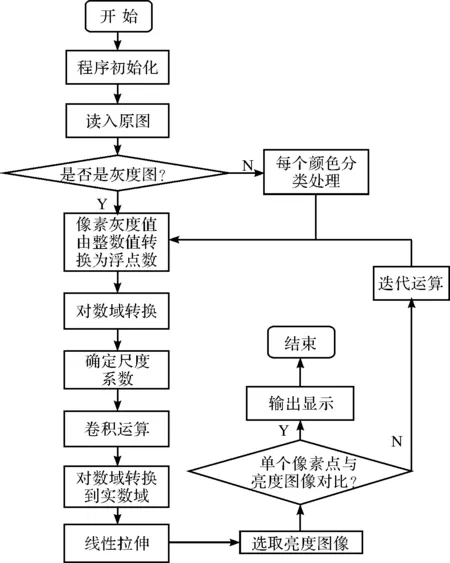
图6 图像增强优化算法流程图Fig.6 Flow chart of image enhancement optimizationalgorithm
MATLAB是用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,也是一款可用于采集图像和有效切割的编程可视化软件。
4 测试方案与测试结果
4.1 测试方案
无论是在实验室内还是在实验室外场地,光线亮度差异很大,由于CMOS成像且透镜尺寸为1/32″,室外图像采集会较差一些,因此选择在实验室(室内柔和光)进行测试。
目标物体为打印在透明胶片上的5种字号的黑色“E”字符,每种字号的“E”有多个随机朝向。目标物距离毛玻璃最远距离为5 cm,在5 cm、3 cm和1 cm等3种不同距离由远及近分别对同一目标物成像。
1) 拍摄方向
首先采用的是平行拍摄,即摄像头与毛玻璃、目标物平行;其次采用侧面拍摄,即摄像头与毛玻璃呈15°、30°、45°等多方面角度进行拍摄。
2) 有无可见光波段
平行拍摄时,采用红色激光透过毛玻璃进行辅助照明。
3) 散射程度不同的毛玻璃
使用3种散射程度不同的毛玻璃进行测试。粗糙度:以280 目为中心,大小100 mm×100 mm,厚度5 mm;材料为K9玻璃。
4) 成像系统识别率比较
与由CCD图像传感器组成的一般成像系统在成像图像的识别成功率方面进行比较。
4.2 测试结果及分析
目标物距离毛玻璃距离为1 cm,选择15°、30°、45°等多角度拍摄,目标物成像效果如图7(a)所示。平行拍摄时,目标物距离毛玻璃距离分别为1 cm、3 cm、5 cm,目标物成像效果如图7(b)所示。选用一个红色激光灯进行辅助照明且自制一聚焦纸筒在室内柔光下拍摄,目标物与毛玻璃的距离分别为1 cm、3 cm、5 cm,目标物成像效果如图7(c)所示。采用散射程度不同的毛玻璃,粗糙度目数分别为300、280、90,距离1 cm拍摄效果如图7(d)所示。经过迭代图像增强处理后,目标物成像效果如图7(e)所示。

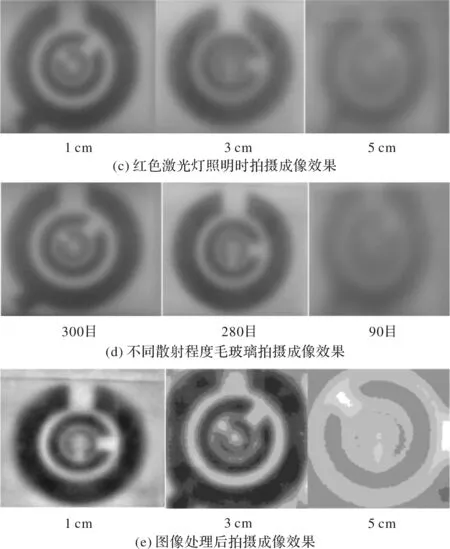
图7 不同拍摄情况下的成像效果比较Fig.7 Comparison of imaging effects under differentshooting conditions
CCD成像系统与本系统在毛玻璃粗糙度为280目数,目标物与毛玻璃距离分别为1 cm、3 cm、5 cm,平行方向各测试100次,能够得到目标物清晰轮廓的次数如表2所示。

表2 测试识别次数结果(100次)
平行拍摄时,在摄取的照片中能得到一个模糊轮廓的目标物,在进行侧面角度拍摄时,光线透过毛玻璃后从四面八方散射出去,无法看清楚毛玻璃后面的目标物,无论是15°、30°、45°等多角度拍摄时,必须要添加一个适当的辅助照明且合适的角度才能得到图片,所以添加的光线一定要穿透力够强。
没有添加任何辅助照明,只有室内柔和光线,得到了一个模糊轮廓的图片。选用红色激光灯进行辅助照明,在室内光线下,红色激光穿透毛玻璃射到目标物,在目标物上形成一个红色光圈,光圈处无法识别目标物的轮廓,是因为选用的激光功率太大导致。
毛玻璃的粗糙度对成像效果影响很大,粗糙度越大,毛玻璃对光散射程度越强,目数在240以上,可以得到轮廓清晰的图像。
与一般成像系统相比较,同等条件下,本系统识别率能够达到95%以上,远远大于未作任何图像处理的CCD成像系统。
5 结论
本系统采用CMOS光电图像传感器通过穿透毛玻璃进行目标物图像采集,加上使用红外激光灯和室内LED灯的辅助照明,完成可见光系统成像,在图像处理过程中,采用迭代图像增强优化处理算法,让采集到的可见光图像与目标物吻合,能够识别不同距离的目标物,且系统识别率能够达到95%以上,达到了预期效果。
猜你喜欢
燃气涡轮试验与研究(2021年6期)2021-08-01
家庭影院技术(2021年6期)2021-07-28
海洋信息技术与应用(2020年4期)2021-01-18
语文世界(初中版)(2020年5期)2020-10-27
中国生物医学工程学报(2019年5期)2019-07-16
摄影之友(影像视觉)(2019年3期)2019-03-30
漫画月刊·哈版(2017年9期)2018-01-29
北京航空航天大学学报(2017年3期)2017-11-23
小天使·六年级语数英综合(2017年5期)2017-05-27
现代工业经济和信息化(2016年19期)2016-05-17
