混合控制方法的三电平整流器
2019-05-24 00:45贺娅莉戴成梅支联合郭艳花
实验室研究与探索 2019年4期
贺娅莉, 戴成梅, 支联合, 郭艳花
(周口师范学院 机械与电气工程学院,河南 周口 466000)
0 引 言
三电平整流器由于具有低成本、低电流谐波和低电压应力和高效率等优势得到关注[1-3],其已经被广泛应用到风力发电系统和通信系统中[4-7]。目前,针对三电平整流器的研究主要包括调制策略和控制策略两部分,调制策略主要包括空间矢量调制和载波调制两部分[8-12]。文献[8]中针对基于LCL滤波器的三电平整流器,提出空间矢量调制方法实现中点电位平衡控制。文献[10]中提出DPWM方法实现T型三电平整流器的开关损耗和中点平衡控制。文献[11]根据空间矢量调制和载波调制方法的等效性,提出载波调制方法。文献[12]中提出了DPWM方法实现三电平维也纳整流器开关损耗抑制。
在控制方面,文献[13]中采用PI控制器实现d轴和q轴电流控制。文献[14]中提出单周控制实现三电平整流器控制,但是该方法的电压利用率低,而且该方法没有涉及中点电位平衡控制。为了解决该问题,文献[15]中提出一种改进的单周控制,该方法不仅提高了电压利用率,而且增加了中点电位平衡控制。
模型预测控制由于具有快速性和控制简单等优势在风力发电等系统得到广泛应用,文献[16]中将其应用到风力发电永磁同步发电系统,采用模型预测控制+空间矢量调制方法实现永磁同步发电系统的控制。但是上述方法未将其应用到T型三电平整流器的相关报道。
本文针对T型三电平整流器提出一种PI+模型预测控制方法。内环有限集模型预测控制采用电流和中点电位电压控制;外环采用PI控制器实现直流侧电压控制。该方法和传统的方法相比,不仅需要较少的PI参数,而且具有动态响应快的优点。最后,通过仿真和实验结果验证了提出模型预测控制能够同时实现T型三电平整流器的电流快速跟踪和中点平衡控制。
1 三电平整流器建模
T型三电平整流器拓扑结构图如图1所示,包括电网电压、三相滤波电容、T型三电平拓扑以及母线电容。T型三电平整流器的输出接负载。以直流侧的N点为参考点,T型三电平整流器在三相静止坐标系下的关系为:
(1)
式中:ia,ib,ic分别为T型三电平整流器的输入电流;ua,ub,uc是电网电压;uNO为直流侧中点到电网中性点N点电压;uiN为T型三电平整流器三相输入电压。
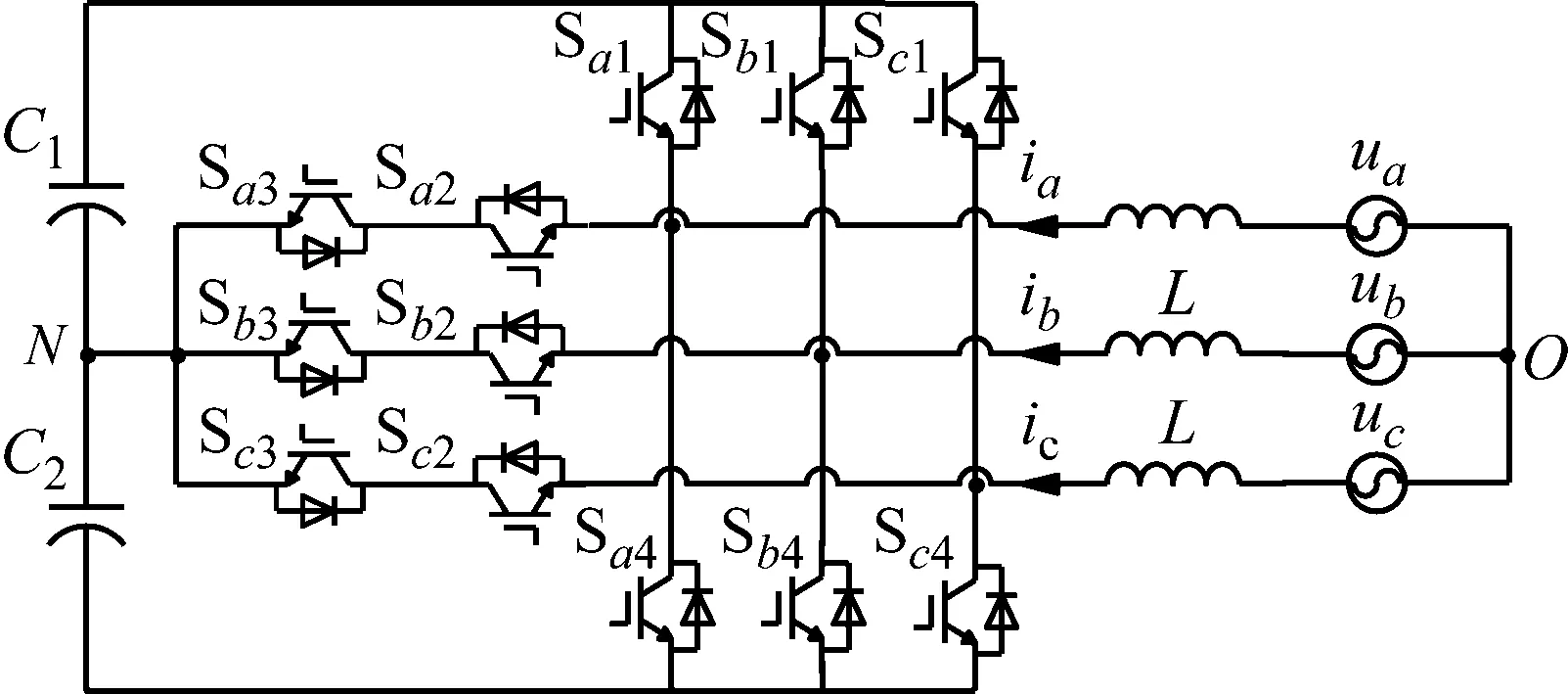
图1 T型三电平整流器拓扑结构图
为了实现T型三电平整流器的控制,首先需要将式(1)坐标变换做clark变换:将abc变换到静止α-β坐标轴下的关系式为
(2)
T型三电平整流器的电网电压矢量、电流矢量、输出电压矢量表示为[1]:
(3)
式中,a=ej2/3π。
T型三电平整流器的输入电流离散化可表示为
(4)
将式(4)代入(2)离散化为:

(5)
T型三电平整流器的输出延迟会影响控制器的准确控制,故本文的有限集模型预测控制需要考虑延迟,新的表达式为:

(6)
式中:u1(k+1),i(k+1)通过拉格朗日插值表示为:
(7)
为了控制T型三电平整流器的输入电流,本文设计的价值函数为1:
(8)
由式(8)可以看出,通过价值函数能够跟踪给定电流。但是T型三电平整流器存在中点电位不平衡问题,因此本文在上述基础上加上中点电位平衡控制。
2 T型三电平整流器双环控制
T型三电平整流器的控制目标包括:①输入电流正弦;②获取中点电位平衡;③获得期望的输出电压。本文提出的控制框图如图2所示,外环是PI控制环,内环是有限集模型预测控制。

图2 本文方法控制流程图
2.1 外环PI控制

2.2 内环预测控制
有限集模型预测控制不需要调制策略和PI控制,故该方法可以快速地跟踪给定电流和保持中点电压平衡。首先,需要控制输入电流,价值函数如式(8)所示;其次,需要控制中点电位平衡。
T型三电平整流器根据幅值能够分为6个大矢量、6个中矢量和12个小矢量以及3个零矢量,共27个矢量。图3为T型三电平整流器空间矢量图,表1为T型三电平整流器的开关状态以及电压幅值。
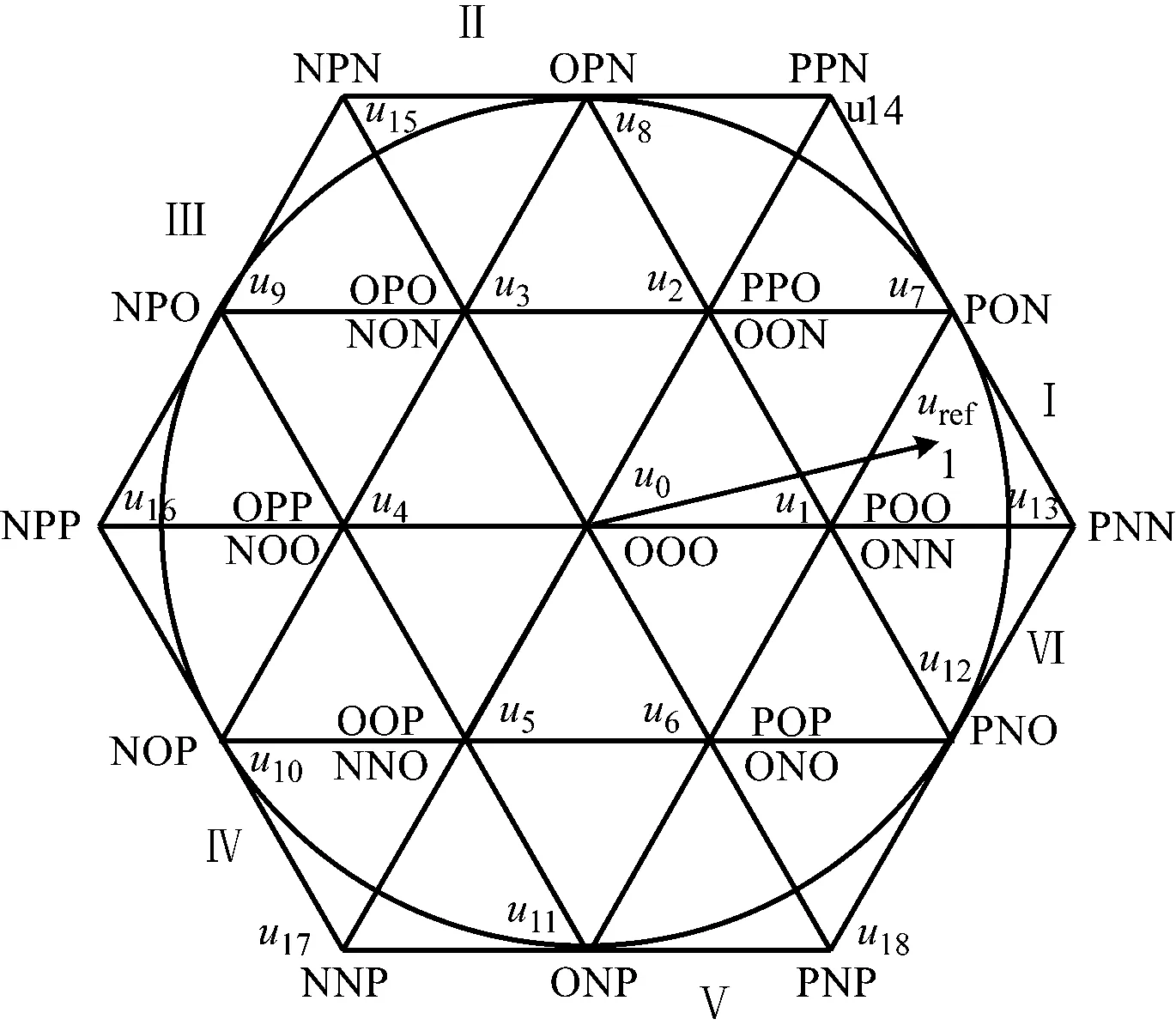

图3 T型三电平整流器空间矢量图
对于矢量来说,可以根据上、下侧电容的电压幅值来选择相应的矢量控制中点电位。本文采用有限集模型预测控制,通过实时控制小矢量的选取,实现T型三电平整流器中点电位平衡控制,如图4所示。
假设T型三电平整流器矢量位于I大区1小区,T型三电平整流器的上侧电容大于下侧电容电压,选择N型小矢量,这时会减少上侧电容电压,增加下侧电容电压,实现中点电位平衡,如图4(a)所示。T型三电平整流器的上侧电容小于下侧电容电压,选择P型小矢量,这时会减少下侧电容电压,增加上侧电容电压,实现中点平衡控制,如图4(b)所示。
T型三电平整流器的输出矢量为零矢量[OOO]和大矢量[PNN]时,这不会影响中点电位,如图4(c)和(d)所示;T型三电平整流器的输出矢量为中矢量[PON]和[PNO],其对上侧电容电压和下侧电容电压的影响和电流方向有关,因此可以通过小矢量对其控制,如图4(e)和(f)所示。
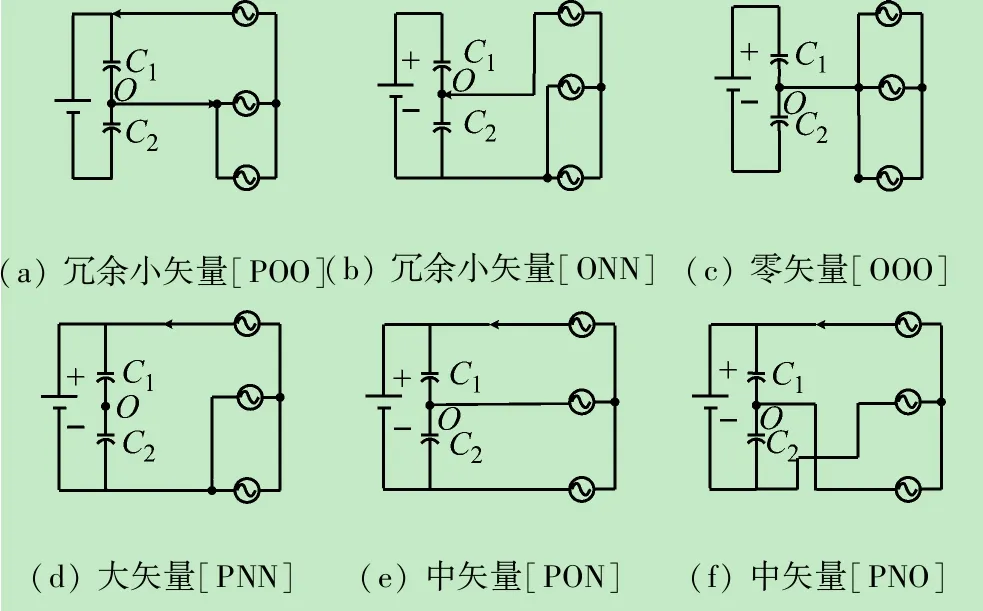
(a) 冗余小矢量[POO](b) 冗余小矢量[ONN](c) 零矢量[OOO](d) 大矢量[PNN](e) 中矢量[PON](f) 中矢量[PNO]
图4 T型三电平整流器开关状态对中电电位影响
为了实现跟踪电流和中点平衡控制,式(8)价值函数变换为:
(9)
式中:λ为权重因子,本文λ=0.2;uP和uN分别为上侧电容电压和下侧电容电压。通过该价值函数可实现准确的电流跟踪和中点电位平衡控制。
3 仿真与实验结果
T型三电平整流器系统由三相滤波电感、T型三电平整流器、母线电容以及电阻组成,通过Matlab/Simulink仿真验证算法的正确性。仿真参如下:ua、ub、uc220 V,电网频率50 Hz,直流侧电压600 V/800 V,直流侧电容3.3 mF,滤波器8 mH,权重系数0.2。
当t=0.16 s时,为了测试动态性能,直流侧电压从600 V升到800 V。图5为传统方法和提出方法直流侧电压和输入电流对比波形。通过对比可以看出,输入电流和直流侧电压能够快速达到稳定状态。
图6为T型三电平整流器给定电流为20 A时传统方法和提出方法的仿真波形。通过仿真可以看出,提出方法的中点电位波动比传统方法波形小,而且线电压波形良好。
为了验证本文提出双闭环控制的正确性,本文搭建了一台10 kW T型三电平整流器的样机。实验参数如下:电网电压220 V,电网频率50 Hz,直流侧电压600 V/800 V,直流侧电容3.3 mF,滤波器8 mH,死区时间2.5 μs,权重系数0.2。T型三电平整流器系统由三相滤波电感、T型三电平整流器、母线电容以及电阻组成。
图7为采用传统方法和提出方法输入电流和电网电压对比波形。通过实验可以看出,两种方法均能快速跟踪给定电流,但是本文提出方法THD较小。


(a) 传统算法


(b) 本文算法


(a) 传统算法


(b) 本文算法
图8为T型三电平整流器给定电流为15 A时本文提出方法的实验波形,通过实验可以看出,提出方法的线电压波形为标准的五电平波形。

(a) 传统算法(b) 提出算法
图7 T型三电平整流器电网电压和输入电流波形
图9为T型三电平整流器给定电流为15 A时提出方法的三相电流波形,通过实验可以看出,提出方法的电流波形THD较小。

图8 采用本文提出法的T型三电平整流器线电压和电流波形图9 采用本文提出法的T型三电平整流器输入电流波形
4 结 语
针对T型三电平整流器,首先对T型三电平建模,然后提出双闭环控制,外环采用PI控制,内环采用模型预测控制,PI控制的输出作为有功电流给定,预测控制函数包括中点电位平衡控制以及电流跟踪控制。仿真和实验验证了提出方法具有快速的电流跟踪和中点平衡控制。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
科学家(2021年24期)2021-04-25
自动化学报(2019年12期)2020-01-19
通信电源技术(2018年5期)2018-08-23
电子制作(2017年10期)2017-04-18
电子制作(2017年19期)2017-02-02
现代防御技术(2016年1期)2016-06-01
通信电源技术(2016年4期)2016-04-04
新高考·高一物理(2016年1期)2016-03-05