
民航飞机平视指引系统仿真平台的设计与实现
2019-05-20 11:05樊智勇沈江玮
实验技术与管理 2019年4期
王 娟, 樊智勇, 沈江玮
(中国民航大学 工程技术训练中心, 天津 300300)
1 民航飞机HGS系统简介
平视指引系统(head-up display guidance system,HGS)利用高度完整的计算机架构,接收并处理来自导航、飞行指引等机载系统的关键飞行数据,根据不同飞行阶段计算所需的指引信息,并投射到飞行员正前方的平视显示器(HUD)上。HGS在各飞行阶段为飞行员提供增强的情景意识和状态管理能力,所有显示的关键飞行信息都与飞行员外部视野保持正形投影,使飞行员在任何跑道、各种气象条件下都能够精确地控制飞机状态参数、准确地预测接地点。根据最新研究结果论,68%的民航飞机起飞和着陆事故可以通过使用HGS避免或降低事故危害程度[1-3]。
目前国内运营中的民航飞机HGS系统均由国外制造商提供[4-5]。国产HGS系统的光学部件较为成熟,但在HGS系统与民航飞机航电系统的集成、复杂气象条件高可靠性指引功能的开发、安全性评估等方面上仍需进一步研究[6]。国产HGS系统的研制以及对民航飞机的加/改装工作,均需要模拟飞机系统逻辑和接口电气特性的HGS仿真平台提供技术支撑。
2 HGS仿真平台设计
2.1 HGS仿真平台架构
HGS系统通常由HGS计算机、合成显示器、头顶组件、信号通告面板、控制显示组件组成(见图1)。

图1 民航飞机HGS系统
民航飞机HGS系统仿真平台架构包括HGS系统仿真器和HGS飞行参数激励器(见图2)。其中,民航飞机环境数据激励与显示系统提供全飞行阶段的飞行仿真激励和图形化数据监控。
2.1.1 HGS系统仿真器
HGS系统仿真器包括HGS计算机仿真器、HUD仿真显示组件、HGS信息通告仿真显示组件和HGS控制显示组件仿真器,并可接入真实HUD光学部件。

图2 民航飞机HGS仿真平台架构
HGS系统仿真器的核心是HGS计算机仿真器,由工控机结合多通道ARINC429航电总线板卡[7-8]、离散输入/输出板卡和接口适配器构成,完成来自飞机大气数据、惯性基准、无线电导航、自动飞行、飞行管理等飞机系统的航电总线数据以及控制命令的解码和处理,具备独立的飞行指引计算功能,并根据不同的飞行阶段和工作模式,生成HUD显示数据和信息通告,用于驱动真实HUD光学部件。
HUD显示数据和信息通告也可通过网络发送给独立的HUD仿真显示组件和信息通告仿真组件,用于系统调试、数据对比分析和故障诊断。
HGS控制显示组件仿真器[9-10]主要用于从HGS计算机仿真器中获取符合ARINC739规范的HGS控制页面信息,选择输入工作模式和着陆跑道长度等数据,底层通信采用ARINC429总线。
2.1.2 HGS飞行参数激励器
在仿真平台中,HGS飞行参数激励器[11]不可缺少但实现复杂。它接收来自民航飞机环境数据激励与显示系统的动态飞行参数,根据内建的HGS接口控制数据库,对飞行参数编码,分配传输通道,以符合ARIN429等航电规范的数据传输频率、时序和间隔,将编码后的数据字或控制命令发送给HGS系统仿真器。飞行参数的编码包括分配数据的标识号和源/目的识别码、编码有效数据位、设置符号状态矩阵、完成数据奇偶校验。驾驶舱内的控制开关、设备预制状态也通过HGS飞行参数激励器转换为离散控制命令。
HGS系统仿真器的反馈数据通过激励器译码后,反馈回民航飞机环境数据激励与显示系统,用于状态监控。
2.1.3 民航飞机环境数据激励与显示系统
该系统是HGS仿真平台的集成验证环境,包括虚拟驾驶舱、虚拟飞机和地面场景与气象条件,能够提供起飞、爬升、巡航、下降、进近、着陆以及复飞等全飞行阶段的动态仿真,并可通过UDP网络为飞行参数激励器提供数据源,也可接收来自激励器的反馈数据,同步更新驾驶舱的显示。
2.2 工作模式仿真
HGS系统仿真器应用于所有飞行阶段的仿真,并可满足仪表飞行气象条件(IMC)、目视飞行气象条件(VMC)、IIIA类精密进近条件下的手动ILS进近和着陆操作的仿真要求。
(1) 主工作模式仿真。主工作模式(PRI)作为默认工作模式,用于从起飞到着陆的所有飞行阶段,包括使用着陆滑跑引导的低能见度起飞操作和所有的航线操作。在主工作模式下,一般直接采用来自民航飞机环境数据激励与显示系统计算后的飞行指引信号,完成I类和II类精密进近功能。但在低能见度起飞操作时,由HGS计算机仿真器根据原始参数自主计算指引符号。
(2) III类仪表着陆工作模式仿真。该模式简称AIII模式,用于IIIA类精密进近条件的手动ILS进近和着陆操作仿真。AIII模式下由HGS计算机仿真器自主计算指引符号,同时高度和速度带被替换为数字符号显示。
(3) 仪表飞行气象条件工作模式仿真。该模式用于I类和II类条件下的手动仪表进近和着陆操作仿真。该模式下HGS计算机仿真器使用来自外部的飞行指引数据控制引导符号。
(4) 目视飞行气象条件工作模式仿真。该模式用于目视操作仿真,除了不显示导航数据外,进近符号和AIII模式相同。
2.3 系统数据接口
HGS系统需要能够根据不同飞行阶段计算所需的指引信息,使飞行员在任何跑道、各种气象条件下都能够精确地控制飞机状态参数、准确地预测接地点。这就需要HGS系统仿真器能够完整接收并处理主要飞行显示参数、飞行航迹参数、无线电导航参数、自动飞行系统指令、驾驶舱基准数据以及警告信息等多个数据源、多种类型的关键飞行数据。为保证数据的高度完整性,以上参数大多需要提供至少2个独立的数据源。
(1) 主飞行显示参数。主飞行显示参数包括空速、姿态、高度、升降速度、航向等关键飞行数据。空速包括校正空速、计算得到的低速警告速度(如失速速度)、高速警告速度(如最大操作速度); 姿态包括机体的俯仰和倾斜角度; 高度包括气压高度和无线电高度; 升降速度优先使用来自惯性基准系统的数据; 航向包括磁航向、真航向以及航向源选择数据。
(2) 飞行航迹参数。飞行航迹参数的计算需要接收和处理飞机的俯仰角度、滚转角度、俯仰速率、偏航速率、航向、地速、航迹角、升降速度以及沿机体三轴的纵向、横向和法向加速度数据。
(3) 无线电导航参数。包括甚高频全向信标VOR方位及偏离、测距机DME距离、仪表着陆ILS航向道和下滑道偏离、指点信标指示以及其他需要的导航信号所提供的方位/偏离/距离(如自动定向机ADF等)。
(4) 自动飞行系统指令。包括飞行指引仪指令、自动驾驶/飞行指引工作方式、自动油门工作方式。
(5) 驾驶舱基准数据。包括飞行员设置的预选空速、预选高度、预选航向数据以及最低下降高度、决断高度、决断速度、抬前轮速度等高度和速度基准信息。
(6) 警告及其他数据。包括风速、风向、马赫数、风切变警告、近地警告、TCAS决断咨询信息。
2.4 激励仿真模型
根据各飞行参数的安全性、完整性、实时性要求以及数据接口电气连接路径等因素,分配各参数的数据源、输入/输出通道类型、时序特性、编解码方式等,建立HGS系统交联激励仿真模型,并以此为基础形成HGS飞行参数激励器的接口控制数据库。根据数据源类型,交联激励仿真模型分为导航数据激励模型(见图3)、自动飞行和飞行管理系统数据激励模型(见图4)、综合显示系统数据激励模型等; 输入/输出通道类型包括高速/地速ARINC429通道和离散指令通道。
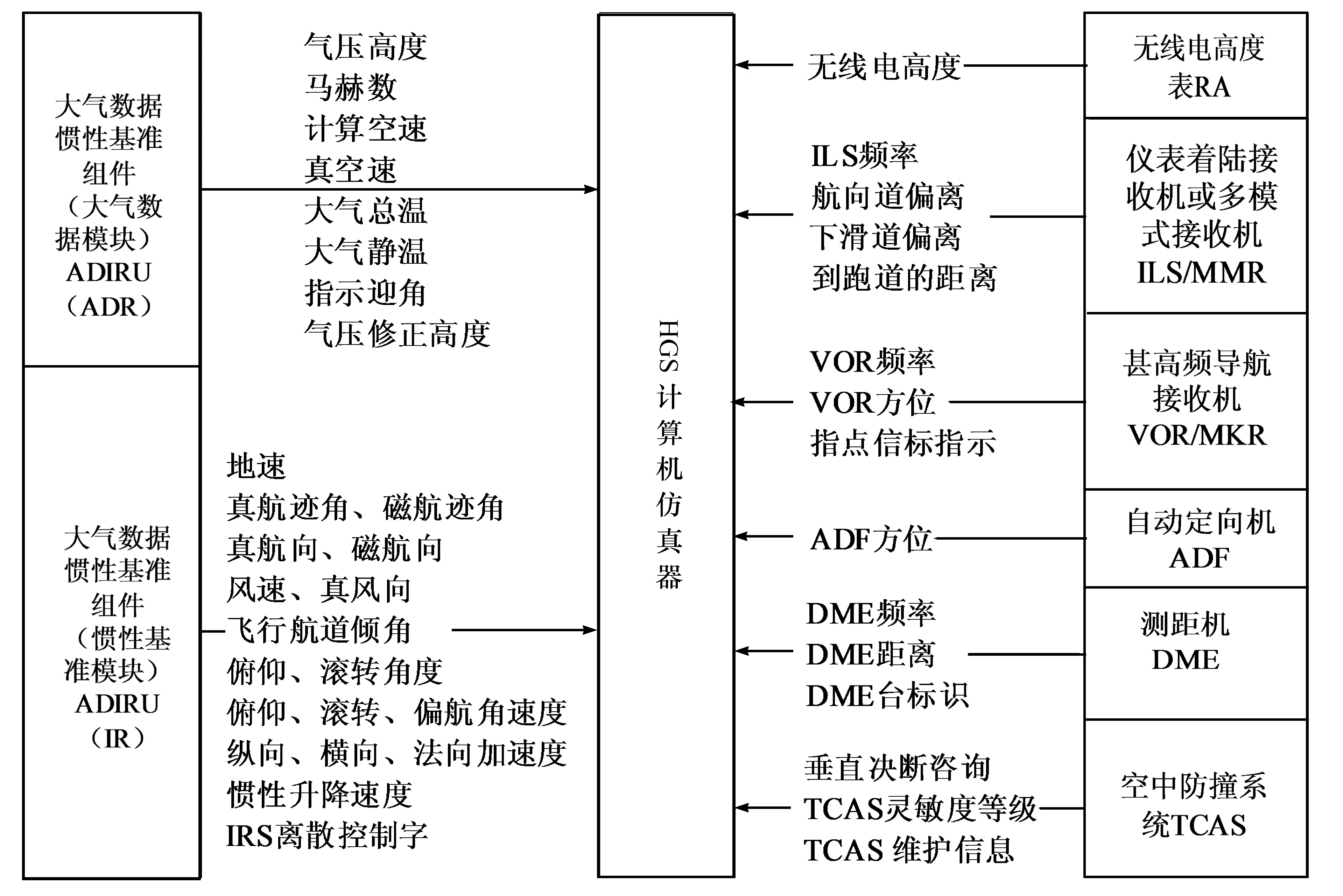
图3 HGS导航系统数据激励模型
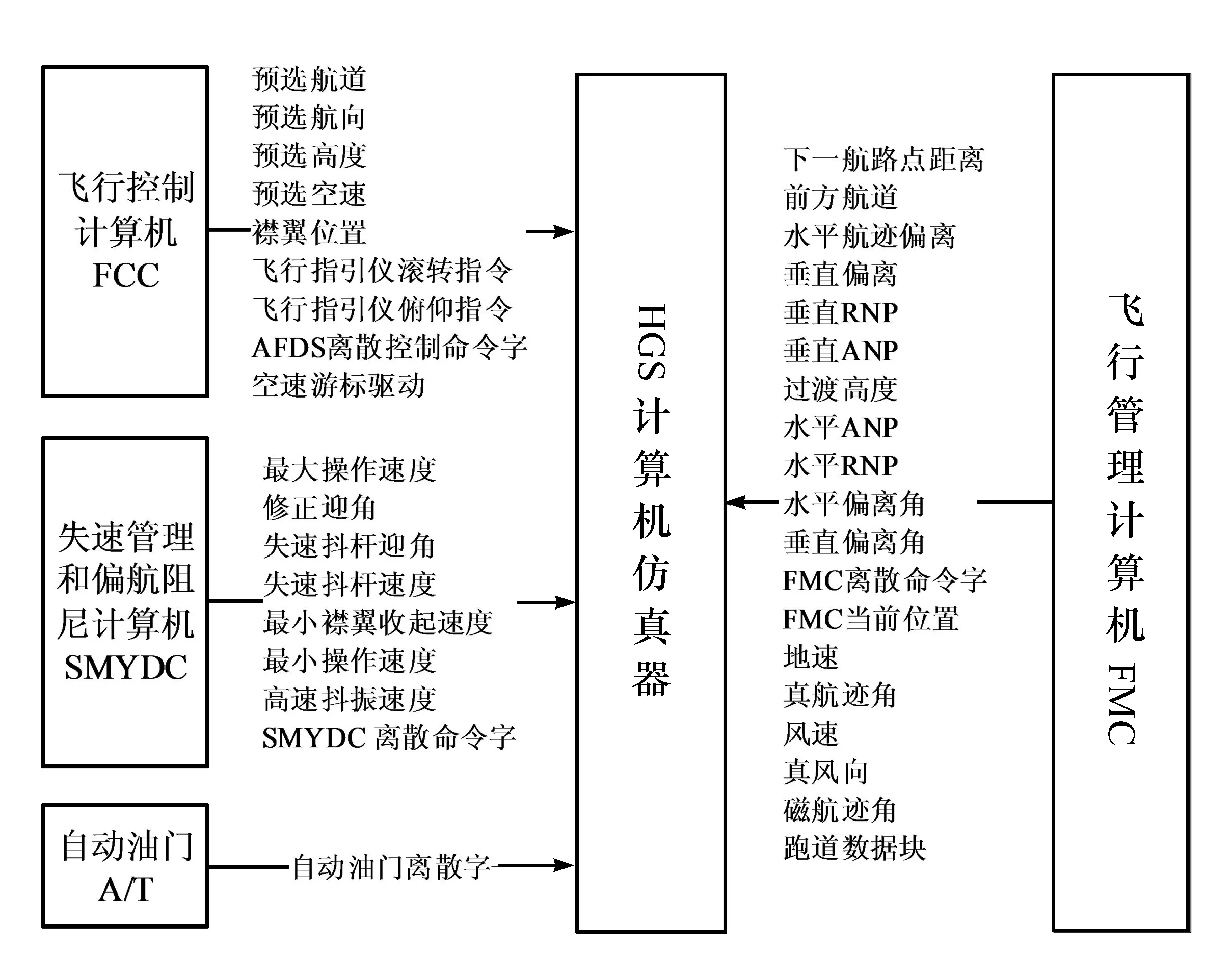
图4 HGS自动飞行和飞行管理系统数据激励模型
大气数据惯性基准组件ADR部分采用ARINC429低速数据接口[12],IR部分采用高速数据接口,每个参数都采用独立的32位数据字传输。
由于飞行管理计算机连续需要传输跑道数据块,故自动飞行和飞行管理系统数据激励模型采用高速数据接口; 而自动飞行系统中的飞行控制计算机、失速管理和偏航阻尼计算机、自动油门则采用低速数据接口。
综合显示系统数据激励模型仿真来自驾驶舱综合显示系统DEU组件的交联数据接口,主要提供气压修正基准值、各类参考速度、预选最低下降高度等驾驶舱内控制面板设置的基准参考值,采用低速数据接口。其他激励模型也逐一建模,不赘述。
3 仿真平台典型工作过程
以PRI模式到AIII模式的自动转换过程(见图5)为例,完成HGS仿真平台的典型工作过程设计。
HGS从PRI模式转换到AIII模式,需要同时满足2个必要条件:(1)HGS自身满足AIII模式所要求的能力; (2)飞机满足航道进近条件(AOC)。
当飞机高度大于离地高度500英尺(152.4 m)且处于PRI模式时,HGS计算机仿真器建立一个独立的进程,监控接收到的导航系统交联数据是否满足以下条件:(1)两部ADIRU都工作于导航模式; (2)所有仪表转换开关都工作于正常位; (3)ILS作为导航信号源; (4)两部接收机都调谐于同一个可用ILS频率; (5)飞机磁航迹和机长预选航道相差小于15°; (6)两部气压式高度表误差在50英尺(15.2 m)内; (7)基准下滑道设置为2.51~3.00°。当以上条件均满足时,输出一个“满足AIII模式所要求的能力”的标识。

图5 从PRI模式到AIII模式的转换过程
在进近过程中,当HGS控制显示组件仿真器为STBY方式时,如果任意一部接收机调谐于ILS频率,并且数字式飞行控制系统的飞行指引仪没有工作在起飞/复飞(TO/GA)模式,那么HGS仿真平台进入AIII预位方式,显示“AIII ARM”。
在预位方式下,HGS仿真计算机持续判断接收到的数据是否满足以下条件:(1)两部导航接收机调谐于同一个可用ILS频率; (2)同时截获航向道和下滑道; (3)两部甚高频导航接收机的航向道偏离均小于1/4点,下滑道偏离均小于1点,持续时间至少5 s; (4)飞机磁航迹和机长预选航道相差不超过15°; (5)ILS1作为导航信号源; (6)无线电高度大于500英尺(152 m)。当以上条件均满足时,输出一个“满足航道进近条件(AOC)”的标识。此时,“AIII”显示闪烁5 s后自动转换为AIII模式。
当AIII模式没有预位,但满足AIII模式所要求的能力和航道进近条件(AOC),在飞机离地高度大于500英尺时,均可以手动选择进入AIII模式。
4 测试验证
4.1 系统集成测试
仿真平台以图2所示架构完成搭建,由民航飞机环境数据激励与显示系统提供起飞、爬升、巡航、下降、进近、着陆以及复飞等全飞行阶段的动态仿真激励,并接收来自HGS计算机仿真器的反馈数据,同步更新驾驶舱的显示。
HGS计算机仿真器中设置交互数据监控模块,实时监控来自交联系统的飞行参数的原始数据,用于虚拟驾驶舱主飞行参数显示、HGS飞行参数激励器输出、HUD仿真图形显示三者之间的数据对比验证。
4.2 典型测试数据分析验证
仿真平台共监控237个ARINC429参数和46个离散控制命令,应用于4种典型工作模式。数据分析验证采用自动测试结合图形化对比方式完成。下面以2个典型测试数据为例说明该过程和验证结果。
4.2.1 惯性升降速度参数测试
定义来自ADIRU1的惯性升降速度名称为
34_HC_A429_ADIRU1_VERTICAL_SPEED_I4
实时数据值为2138980783。该值显示为十进制整型数据,转为二进制后,为31位数据字(第32位奇偶校验已在底层协议完成,统一记为0),如图6所示。

图6 典型数据分析——升降速度
该数据字符合ARINC429规范,解析标识位为八进制365; SDI=01,表明数据来自第一部ADIRU; 在365数据字中定义数据有效位X=15位,数据分辨率Y=1.0; 第29位符号状态位为1,表明有效数据为负值,需要取补码后进行计算。图6中,计算可得升降速度为-1 038 英尺/min(-316.4 m/min),再根据HUD数据显示规则,显示增量为50英尺/min(15.2 m/min),整定后参数为-1 050英尺/min(-320 m/min),与HGS实际仿真显示参数一致。此外,该数据也与虚拟驾驶舱中主飞行显示器参数一致。
4.2.2 下滑道偏离参数测试
定义来自ILS1的下滑道偏离参数名称为
34_HC_A429_ILS1_GLIDESCOPE_DEVIATION
实时数据值为2141847870,解析标识位为八进制174; 数据有效位X=12位,数据分辨率Y=1/5120; 有效数据为负值,取补码后计算。图7中,计算可得偏离值为-0.0168 DDM。下滑道偏离的显示可操作范围为±0.22 DMM(±2点)。因此,下滑道显示偏离值整定为飞机位于信号波束下方0.15点,与HGS实际仿真显示参数一致。

图7 典型数据分析——ILS下滑道偏离
5 结语
通过与民航飞机环境数据激励与显示系统的集成测试,结果表明:所设计的民航飞机平视指引系统仿真平台数据传输正确可靠,显示符合数据规范,能够满足HGS系统仿真验证的需求。HGS仿真平台对国产民航飞机平视指引系统的设备研制以及进一步在飞机上加/改装的技术验证工作,均能够提供有效的技术支撑。
猜你喜欢
环球时报(2022-05-30)2022-05-30
能源工程(2022年2期)2022-05-23
重型机械(2020年2期)2020-07-24
中国计算机报(2020年9期)2020-03-25
装备制造技术(2019年12期)2019-12-25
当代陕西(2019年11期)2019-06-24
铁路计算机应用(2018年4期)2018-05-03
作文周刊·小学一年级版(2017年9期)2017-06-20
小学生导刊(低年级)(2016年8期)2016-09-24
通信电源技术(2016年5期)2016-03-22
