
基于双层优化算法的电动汽车有序充电策略研究
2019-05-20 08:18:36姚天昊赵思雯
沈阳工程学院学报(自然科学版) 2019年2期
姚天昊,叶 鹏,赵思雯
(沈阳工程学院 a.研究生部;b.电力学院,辽宁 沈阳 110136)
随着化石能源日益短缺,温室效应日益加剧,大规模地使用电动汽车这种使用二次能源的环保低碳交通工具将会成为必然趋势。由于电动汽车负荷具有时空随机性的特征,电动汽车规模化的充电负荷将会产生电网峰谷差增大、扰乱配电网稳定运行等不良影响[1-3]。因此,为了缓解上述不利影响,需要对电动汽车充电负荷进行有序控制,使电网恢复经济、稳定的运行状态[4,5]。
文献[6]建立了电动汽车停车需求时空分布模型,采用蒙特卡洛模拟方法对大规模电动汽车进行仿真,对充电负荷进行分析预测。文献[7]通过构建及分析峰谷电价时段的响应模型,提出了峰谷电价时段的优化模型,对用户进行引导,从而实现有序充电优化。文献[8]对比了规模化充电负荷在自然充电和有序充放电情况下对电网的影响,采用遗传算法对其充放电策略进行寻优求解。文献[9]以电动汽车充电站收益最大化为目标,在不加重电网负担的前提下对电动汽车充电进行两阶段优化。文献[10]通过采用主成分分析和模糊聚类相结合的方法研究用户驾驶行为特性,进而对电动汽车进行充电调度。
1 电动汽车充电负荷控制可行性分析
电动汽车的充电负荷有在时间上、空间上随机分布的特征,这也是其无序充电给电网带来不利影响的重要原因之一[11-13]。在研究电动汽车充电负荷预测方法时,需要充分考虑这一特征。在这基础上,使用分时电价鼓励用户参与电动汽车的有序充电控制,对于有效地缓解无序充电负荷对电网的不利影响,实现削峰填谷、降低电动汽车对用户和电网两方面的充电成本,高效、经济地推广电动汽车至关重要。
一定规模的电动汽车所形成的充电负荷主要是由数量与本身特性所决定的,而电动汽车特性又分为电池特性和行驶规律[14]。三者共同影响电动汽车充电负荷,具体分析包括:
1)电动汽车保有量。不同地区的电动汽车数量与其发展阶段和电动汽车推广情况有关,对特定地区的电动汽车充电负荷估计,需要了解当地的电动汽车实际保有量。
2)电动汽车电池充电特性。充电特性包括电池的充电功率、电池充电容量及充电模式等。对实际检测的电池充电曲线进行分析及简化,结合实际情况及对未来电动汽车发展趋势的预测,确定充电电量的适合值。电动汽车充电模式主要有3种,包括慢速充电、快速充电和更换电池,对不同的充电模式应采用不同的负荷模型。
3)电动汽车的行驶规律。其规律是指私家车、出租车、公交车等用户的用车行为,主要包括电动汽车的出行时间、行驶里程等。
电动汽车充电总负荷的大小取决于该地区电动汽车的保有量,而某一辆车的当日所需充电负荷则取决于充电开始时间及当日行驶里程数(即当日消耗负荷总量),其充电功率则取决于电池本身的充电特性。
对于地区电动汽车的保有数量,可以根据办公区和居民区来进行区分和统计,从而评估或确定电动汽车的保有数量。电动汽车的电池功率特性可以根据车型和电池功率实验,给出充电功率特性和充电容量。对于电动汽车的行驶规律,在这里假定由电动汽车用户决定电动汽车充电的地点。电动汽车的充电模式也可以根据电动汽车的型号和使用者意愿决定,在这里假定所有电动汽车用户采用整车慢充的方式。这些信息确定后,就可以评估该地区每日待充电的电动汽车数量和充电功率,从而为电动汽车的有序充电控制奠定基础[15]。
2 有序充电控制目标和约束条件
2.1 有序充电控制目标
电动汽车的有序控制是通过控制充电时间来满足一定的目标函数,从而达到调整充电负荷在时间上的分配,避免大规模电动汽车集中充电和在原本的负荷高峰期造成负荷峰值叠加的现象,从而缓解电动汽车充电负荷对电网的不利影响。通过分析目前关于有序充电的研究可以发现,充电控制目标的考虑角度主要有两个:从用户角度考虑和从电网角度考虑。结合这两个方面的问题,在满足用户充电需求的前提下,使充电负荷分配最合理。参与有序控制的电动汽车充电负荷公式如下:

式中,pEi(t)为第i辆电动汽车的充电负荷;PE(i-1)(t)为已经参加有序控制的i-1辆电动汽车的充电负荷总和;PEi(t)为加入第i辆电动汽车后,参与有序控制的电动汽车充电总负荷。
由于对电动汽车进行有序控制就是需要控制有意愿参与控制的用户的充电时间,由电网方面规定充电负荷接入电网的时间,因此,将每辆电动汽车对应的充电负荷用以时间为自变量的函数来表达。为了体现有序控制前后对电网负荷的影响,将其他基本负荷看做以时间为自变量的函数。
有序充电控制将减小日峰谷差和缓解负荷整体波动作为目标。为了更加明确地表达控制目标,将目标简化为如下数学表达式:

式中,PDmax与PDmin分别为日最大负荷与最小负荷,其差值即为峰谷差;λ1与λ2为各目标函数的权重系数,通过改变权重系数,可以调节控制目标的偏重点,当一方为0时,则控制目标变为单目标;为每一时刻负荷的均方差,均方差越小表示负荷波动越低,为方便对峰谷差和均方差两个目标进行控制,现对其进行加权处理,将两个目标函数结合成一个目标函数;PLoadt为居民日负荷预测值;PWt为供电地区风电接入日发电功率预测值;PHt为供电地区光伏接入日发电功率预测值;PEt为供电地区所有电动汽车充电功率计划值。
式中,PEi为某一单个电动汽车的充电功率;Ki(t)为某一单个电动汽车在t时刻是否充电的判断函数,若处于充电状态,则Ki(t)=1,否则Ki(t)=0。
2.2 有序充电约束条件
上述控制目标其实质是从电网角度出发,避免大规模电动汽车集中在同一时间段充电对电网产生负面影响。而从用户角度考虑,基本充电需求就是关于充电时间及充电功率需满足电动汽车所需,用户的基本充电需求即约束条件,若用户有意愿接受电网控制,有关充电时间则存在两种情况:
1)从用户到家到未来的一段时间为充电时间,即对应车辆需要在这段时间内充满;对于充电电量需求,所有电动汽车均充满。
2)从用户到达办公场所到未来的一段时间为充电时间,即对应车辆需要在这段时间内充满;对于充电电量需求,所有电动汽车均充满。
本文只考虑居民区的慢充充电模式,设定每日充一次电,电动汽车充电为恒功率充电,则可列出有序充电约束条件为
其中,若tstart-j<tj<tend-j,则Ki(tj)=1;反之,则Ki(tj)=0。式中,tstart-j为电动汽车接入电网时刻;tend-j为电动汽车离开电网时刻;tstart-jmin为车主能接受的电动汽车接入电网最早时刻;tend-jmax为车主能接受的电动汽车离开电网最晚时刻;Ki(tj)为第i台电动汽车在时段j的充电状态;PEi(tj)为第i台电动汽车在时段j的充电功率;Ei为第i台电动汽车的充电电量;Ei0为第i台电动汽车的初始荷电状态。
3 电动汽车充电有序控制的双层优化解算策略
电动汽车充电有序控制,即在某个时间范围内,使电动汽车的荷电状态从初始值达到某一期望值,并要求在这个过程中,使电网的负荷特性得到优化或减少对电网运行的影响。需要求解的问题,即为如何安排电动汽车在整个时间范围内的充电功率。
3.1 有序控制原理
为了整个控制流程,清楚寻优部分,将一天的24 h中每15 min作为一个时间点,共96个。若某辆车在时刻j正在充电,则对应值为1,否则为0,假设电动汽车充电过程不间断直到充满电时,充电结束。当初始充电时间确定后,按时长为15 min计算的充电时间,通过充电功率、充电量、充电时长的关系式,即可计算出停止充电的时刻。因此,可以把某辆电动汽车的初始充电时刻tstart-j作为待优化的变量。通过穷举法列出tstart-j的所有情况,再结合不同用户的要求,就能够找到使目标函数最小的解,即为最优解。
若系统中存在多种类型的车辆参与电动汽车有序控制,则该优化问题的解空间急速增长,求解较为困难。因此,提出采用基于动态规划的双层优化解算策略求解电动汽车的有序控制问题。
动态规划决策过程为初始状态→决策1→决策2→…→决策n→结束状态。
电动汽车有序充电控制过程也可以描述为一个多阶段寻优的过程。假设该供电分区有m台电动汽车参与管理控制,若系统每次安排一辆电动汽车充电,则系统需要经过m次才能完成所有电动汽车的充电。在第一次,系统有m个选择,按优化计算原则,应该选择对系统优化目标最为有利的方案作为当前的最优方案;随后进行第二阶段的优化选择,直到最后一辆电动汽车充完电为止。
值得注意的是,在每个阶段选择最优方案时,即选择哪一台电动汽车入围,参与有序控制计划的时候,需要对可能的若干种方案进行计算,看哪种方案使系统最为受益,这就需要对每个可能入围的电动汽车充电计划进行计算。由于每台电动汽车的充电策略本身拥有多种选择方案,这就需要进行择优计算。因此,上述问题是一个嵌套的优化问题。外部使用动态规划方法进行求解,每个优化阶段都使系统最收益的电动汽车入围进行有序充电控制;内部对每个电动汽车的多种充电方案进行选择,找出最好的充电方式。由于单台电动汽车的充电方案受到充电时间的限制且数量有限,因此,采用穷举法来进行单台电动汽车的充电方案的优化。
基于动态规划的电动汽车充电策略如图1所示。动态规划方法通过阶段划分把一个多变量的优化问题,分解为多个单变量的优化问题[9]。将负荷特性当作状态量,每个电动汽车在该阶段的充电功率当作决策量,其状态转移方程为

式中,PDi(t)为供电分区的负荷状态;PD(i-1)(t)为第i-1阶段,i-1辆汽车入围后的负荷状态;PEi(t)为第i阶段,i辆汽车的充电负荷。
式(7)中,第i阶段,即i辆汽车的充电负荷,考虑其依据起始充电时间的不同,采用穷举法进行优化计算。
定义两个状态之间路径的权重:

式中,PDij(t)为从状态i转移到状态j后,由于考虑电动汽车j的充电策略,负荷特性目标函数的改变值;PD(i)(t)为第i辆电动汽车入网后,考虑所有前i辆车的充电行为后,系统负荷特性的目标函数值;PDj(t)为第j辆电动汽车入网后,考虑所有前j辆车的充电行为后,系统负荷特性的目标函数值。
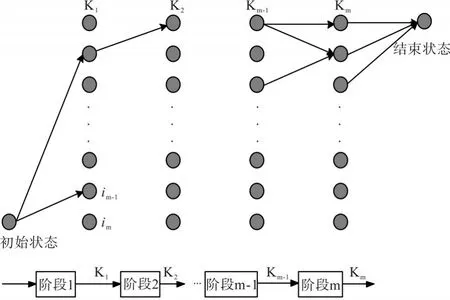
图1 基于动态规划的电动汽车充电策略
3.2 电动汽车有序充电控制过程步骤
基于动态规划的内外双层优化解算策略的主要框架如下:
1)动态规划解算框架。
①获取用户充电意愿信息;
②以考虑电动汽车充电的负荷初始态、终止态、中间状态,建立电动汽车有序充电的多阶段决策模型;
③从初始状态出发,依次计算每个决策阶段各个可能到达状态的状态值;
④计算相邻的两个状态之间状态转换路径的权重;
⑤从初始状态到终止状态,进行最短路径搜索,找到一条最短路径,即最佳决策方案。
2)内层每个电动汽车充电优化策略的优化方案,有序充电控制具体流程如图2所示。
①获取用户24 h充电意愿信息,充分了解用户对充电开始时刻的需求;
②进行区内分布式电源发电功率预测和地区负荷预测;
③计算等值负荷曲线和初始负荷下的目标函数值;
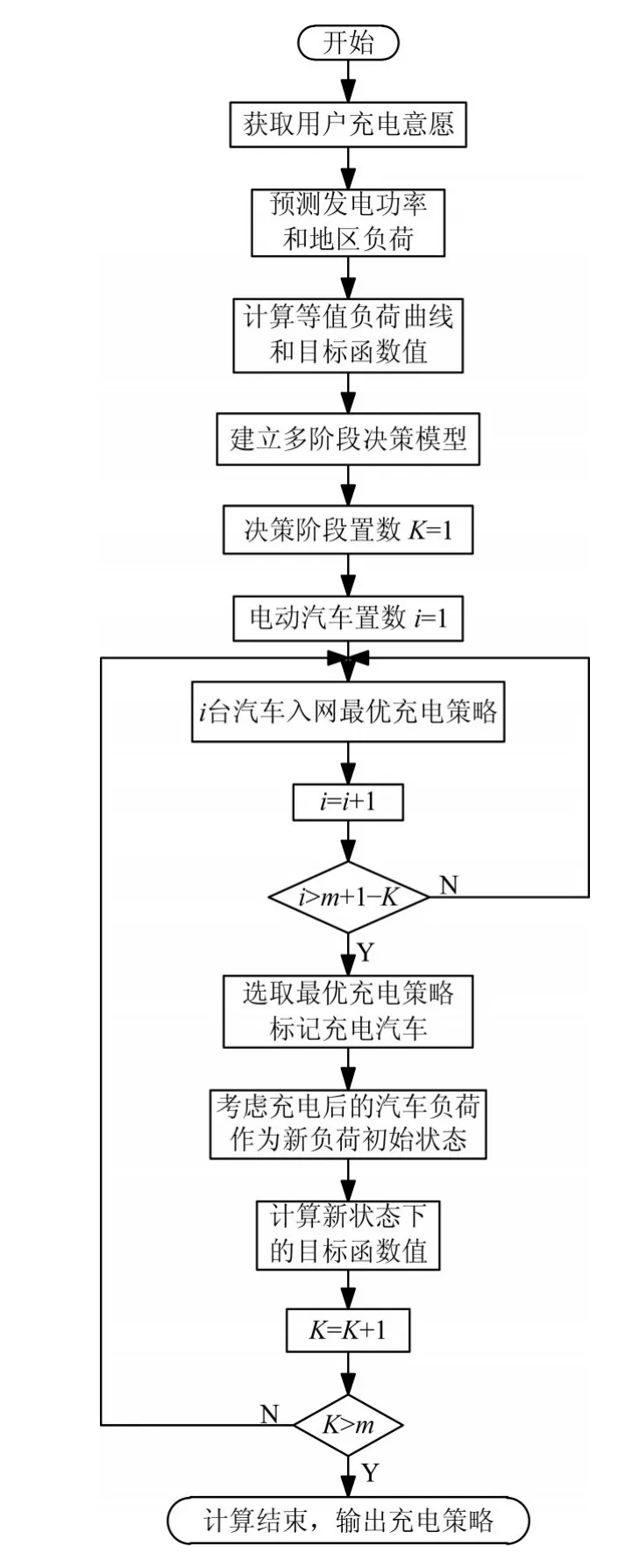
图2 有序充电控制流程
④依据参与控制的电动汽车数量m,建立多阶段决策模型;
⑤将决策阶段置数为K=1,并将电动汽车置数为i=1;
⑥利用穷举法计算初始状态下,i台电动汽车入网充电的最优充电策略;
⑦令i=i+1;
⑧判断是否满足i>m+1-K,若满足则转至⑨,否则跳转至⑥;
⑨从上述计算结果中选取最优充电策略并标记充电汽车;
⑩将第i辆电动汽车负荷叠加到负荷初始状态,并作为新的负荷初始状态;
⑪计算新状态下的目标函数值;
⑫令K=K+1;
⑬判断K>m是否满足,若满足则转至⑭,否则跳转至⑥,继续进行下一决策阶段计算;
⑭结束计算,输出充电策略。
3)利用穷举法计算单台电动汽车在某一负荷状态下的最优充电策略,具体流程如图3所示。
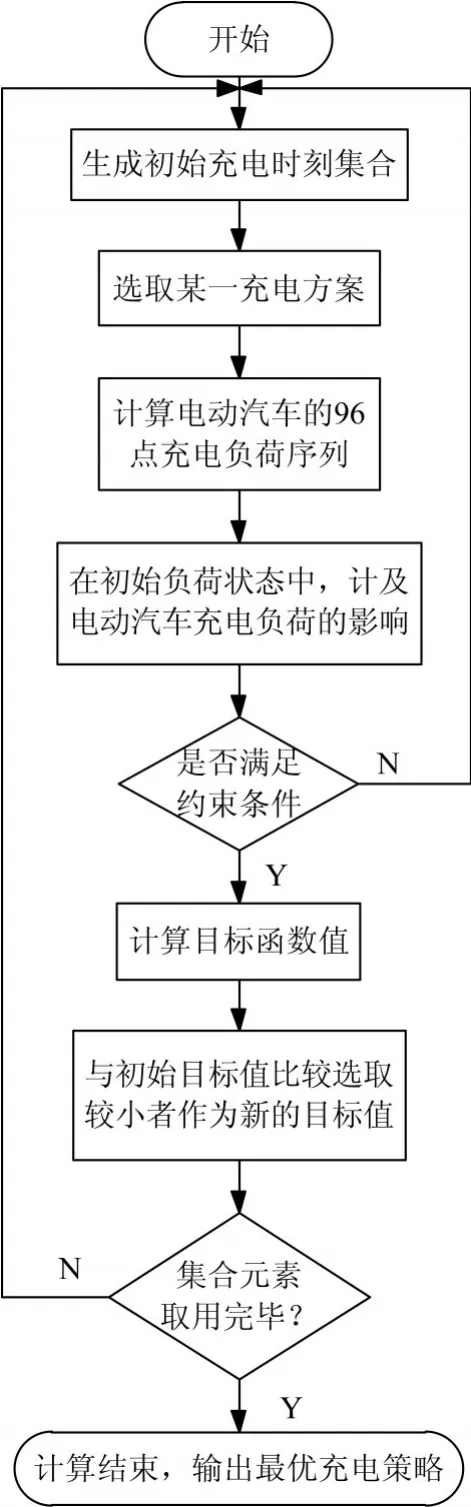
图3 穷举法求解最优充电策略流程
①根据用户使用需求,生成该电动汽车可能的充电方案集合,即初始充电时刻集合;
②取某一充电方案,计算该充电方案下,电动汽车的96点充电负荷序列;
③在初始负荷状态下,计及电动汽车充电负荷的影响;
④判断是否满足约束条件,若满足进入到⑤,否则返回②;
⑤计算目标函数值;
⑥与初始目标值比较,选取较小者作为新的目标值;
⑦判断集合元素是否取用完毕,若取用完毕则进入⑧,否则返回②;
⑧输出最优充电策略。
关于用户是否同意有序控制,在后续的分析中将认为70%的用户接受给出的充电时间,而剩下的30%将按照到家即充处理。
4 有序充电控制应用案例分析
若利用分布式发电削峰填谷和平衡负荷的优点,将极大提高发输电设备的利用率,无需建设一些仅在高峰期使用的发输电设备,还能有效地提高电网的经济性。因此,作为分布式电源的组成部分,本文将风力发电功率、光伏发电功率和基础负荷叠加生成等值负荷曲线与电动汽车并网后的总负荷曲线进行对比。
本文的控制目标为综合考虑峰谷差最小和负荷波动最小。假设某地区电动汽车渗透率为30%,通过改变λ1和λ2权重值,来改变总目标中峰谷差最小和方差最小两个分目标的偏重程度。进行有序控制后的负荷曲线如图4所示,图4a为将基础风力发电及光伏发电作为总负荷一部分,与基础负荷叠加得到等值负荷曲线。图4b为电动汽车无序充电负荷与图4a等值负荷叠加得到的总负荷曲线,即进行有序控制之前的负荷曲线。
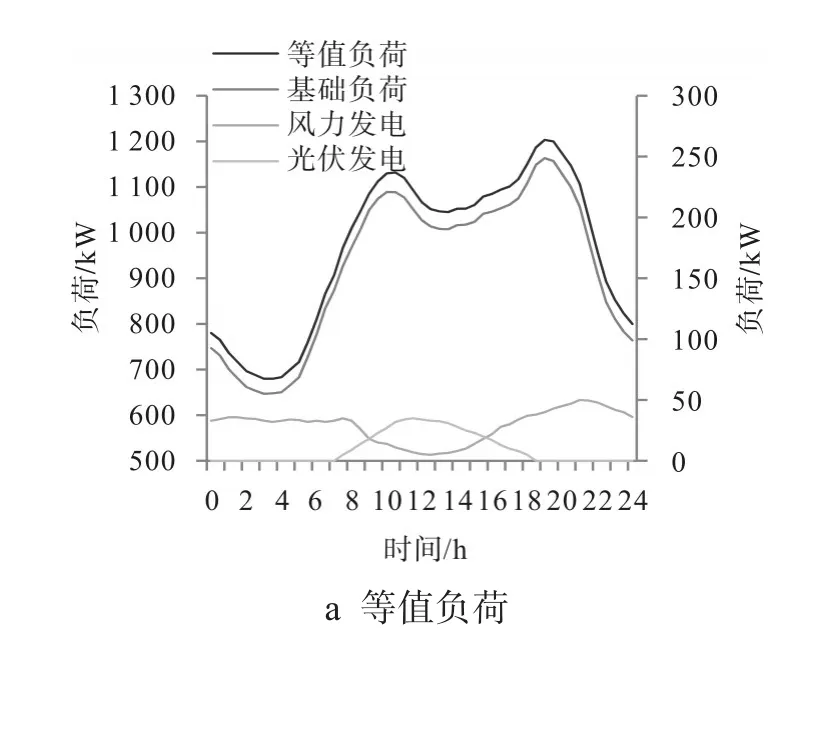
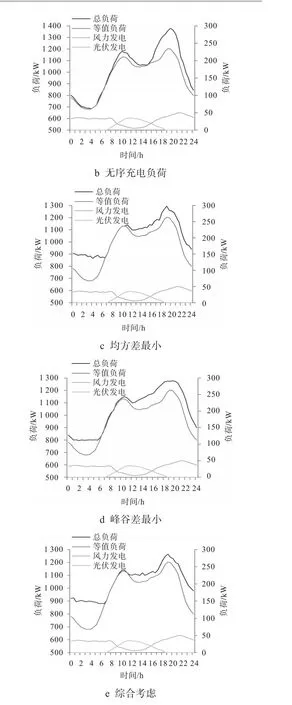
图4 不同控制目标下有序控制情况
min),也就是仅以峰谷差最小这一分目标作为总控制目标的有序控制后的负荷曲线; 图4e为λ1=λ2=0.5,,也就是综合考虑以均方差最小和峰谷差最小为总目标的有序控制后的负荷曲线。
通过对比图4c、4d、4e可以看出,对两种分目标的3种不同偏重程度的有序充电方法,均有效地对充电负荷进行了控制,缓解了峰谷差及负荷波动的情况,将集中于16时~21时的峰值期充电负荷转移并填充到0时~6时及12时~16时的两个负荷低谷期中。
整体负荷曲线有两段相对平稳期,除基础负荷本身的突升段和负荷高峰段外,在有序控制下,充电负荷调整明显。另一方面,由于考虑了负荷均方差最小这一控制因素,使负荷的波动性明显降低。
电动汽车并网后,通过有序控制的负荷曲线图4c、4d、4e与无序充电图4b的对比可以看出,峰值增加情况有所缓解。表1为无序充电及3种控制目标负荷峰值增加量。
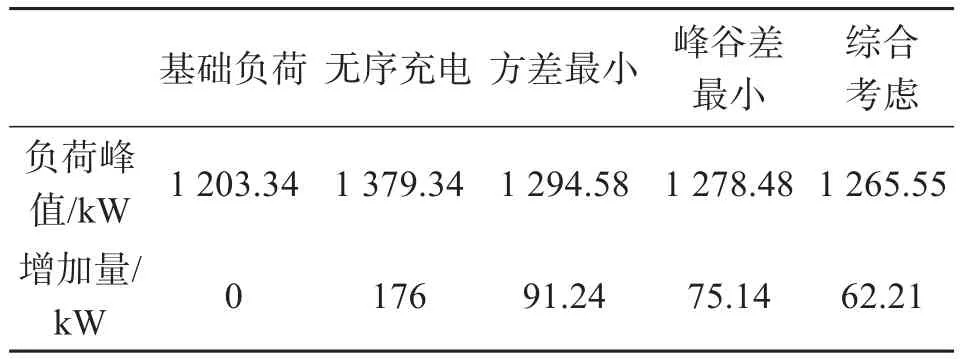
表1 无序充电及3种控制目标负荷峰值增加量
3种不同偏重的控制目标有序控制与无序充电的负荷峰值相比,有了明显的降低,有序控制下最大的负荷峰值增大量大约是无序充电增量的一半,由此可见,有序充电控制效果明显且有效。表2为无序充电及3种控制目标峰谷差的变化情况。
由表2中数据可知,综合考虑峰谷差和均方差的控制目标,控制效果最好,令负荷峰值增量最小的同时峰谷差减小效果最明显。
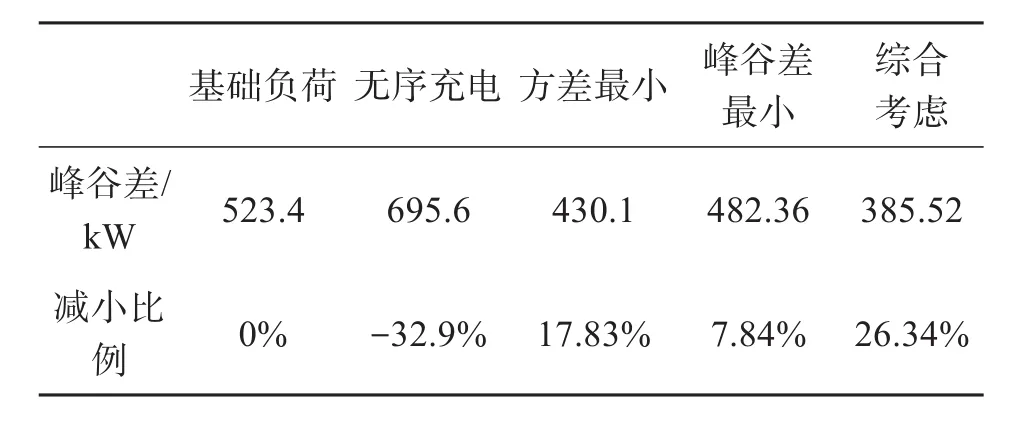
表2 无序充电及3种控制目标峰谷差的变化情况
综上所述,将有序充电控制与无序充电对比可得,通过有序控制的充电负荷能够有效地缓解负荷峰值增加的问题,与电动汽车负荷并网前相比,明显减小了峰谷差。将3种不同偏重的控制目标进行比较可以看出,在同时考虑均方差和峰谷差最小的控制目标下进行控制的效果最好。
5 总 结
本文主要研究一种基于双层优化算法的电动汽车有序充电策略。通过考虑每辆电动汽车电池特性及行驶规律,构建排序充电模型,更有效和可靠地进行电动汽车有序充电,实现电动汽车充电负荷参与电网调峰。所述控制策略具体步骤包括考虑不同电动汽车的电池特性及行驶规律,建立动态规划逐层寻优;通过内层寻优利用穷举法确定单台电动汽车的最优充电策略;根据内层寻优结果进行外层寻优,外层利用动态规划法对电动汽车充电进行主动排序控制。通过对应用案例分析可以得出,在同时考虑均方差和峰谷差最小的控制目标下进行有序控制的效果最好。
猜你喜欢
湖南电力(2021年1期)2021-04-13 01:37:02
汽车维修与保养(2021年8期)2021-02-16 00:28:32
科技风(2019年1期)2019-10-14 01:36:13
山东冶金(2019年2期)2019-05-11 09:12:18
动漫星空(兴趣百科)(2019年3期)2019-03-07 07:47:46
家庭科学·新健康(2018年10期)2018-12-15 11:26:16
海外星云(2016年17期)2016-12-01 04:18:42
电源技术(2016年9期)2016-02-27 09:05:41
自动化博览(2014年10期)2014-02-28 22:33:55
车辆与动力技术(2012年1期)2012-08-21 07:22:08
