
高速铁路CPⅢ水准网平差通用模型研究
2019-05-16 02:42刘江涛李建章刘彦军高志钰
铁道标准设计 2019年6期
刘江涛,李建章,刘彦军,高志钰
(1.兰州交通大学测绘与地理信息学院,兰州 730070; 2.甘肃省地理国情监测工程实验室,兰州 730070)
CPⅢ水准网网形狭长,普遍采用水准测量方式[1](困难时采用中间设站三角高程测量法)。《高速铁路工程测量规范》(以下简称“规范”)中指出CPⅢ控制网水准测量可按矩形环单程水准网(矩形法)或往返测水准路线(中视法)构网观测。实际作业时中视法测量每测站一个后视对应多个前视,导致观测高差之间不独立,存在相关性,给其后传统水准网平差的权阵确立带来了一定困难[2]。之后提出的新中视法是以现代电子水准仪重复测量数据离散性小为基础的单程观测方式[3]。相比中视法其观测效率显著提升,但同样存在相邻点高差相关的问题。矩形法闭合环内的高差按照“后—前—前—后”或“前—后—后—前”的顺序观测,可以对CPⅢ点进行重复观测,符合我国水准测量习惯的同时也保证了观测高差彼此独立,但观测效率仍然不高。X形法和Z形法以及矩形法改进型(新矩形法、单程矩形法、双程矩形法)均通过有效缩短司尺员移动距离来提高观测效率,是对矩形法的进一步改进[4-6]。
但上述的不同类网形对现有软件的适用性提出新的要求,且以高差为观测值的传统CPⅢ水准网平差模型(以下简称“传统模型”)处理中视法这类网形时,忽略观测值的相关性,理论上并不严密。因此提出一种CPⅢ水准网平差通用模型(以下简称通用模型),该模型观测值为水准尺读数,彻底消除了观测值相关的可能性,突破了观测网形的限制,适用性较强。
1 CPⅢ水准网平差通用模型
1.1 函数模型
一般在CPⅢ水准网观测中,仪器在两对CPⅢ点构成的矩形环中心位置附近不挪动,直至观测完该测站所有点,则仪器高(设为b)和仪器架设点的地面高程(设为Hz)在一个测站中始终不变。若某个CPⅢ点的水准尺读数为a,该点高程未知,用H代替,理想水平视线下有下式成立
H+a=Hz+b
(1)
然而在实际观测中受到大气折光、地球曲率以及仪器i角误差等系统性偏差的影响,导致观测时视线总会偏离水平位置。如图1所示:由仪器i角误差引起的偏差为δh1,大气垂直折光和地球曲率共同引起的偏差为δh2,考虑到系统误差则有下式成立
H+a=Hz+b+δh1-δh2
(2)

图1 系统偏差影响下的视线示意
高铁CPⅢ水准网施测等级为精密水准,电子水准仪观测时要求前后视距差不超过2 m,那么可以近似认为一个测站δh1,δh2均为固定的系统性偏差。考虑到平差时只需求得未知CPⅢ点高程,对其余未知量可以统一用参数λ进行合并,即令
λ=Hz+b+δh1-δh2
(3)
式(2)可化简为
a=λ-H
(4)
进一步误差方程可写为
V=λ-H-a
(5)
上式为CPⅢ点观测值误差方程,对应已知点观测值误差方程为
V=λ-(H0+a)
(6)
其中,H0为已知点高程。
由于观测值为水准尺读数,一副水准尺的零点之差在一个测段中无法消除,但一副合格的因瓦水准标尺, 其零点之差允许值为0.1 mm[7],其影响可以忽略不计。
1.2 随机模型
观测值向量a=(a1,a2,…,an)T的协方差阵为
7)
根据CPⅢ平面构网特点,选择30 m视距下的水准尺读数为单位权观测值,又考虑到观测值相互独立,则权阵为对角阵如下
8)
其中,d代表观测值的视距。
1.3 现有网形下的多余观测
目前,学者提出的诸多CPⅢ水准网形,按每测站观测的CPⅢ点个数,大致可归纳为两类。第一类以中视法为代表,除首个测站外,单程每测站观测CPⅢ点个数为3。网形如图2所示,单程观测时有n个测站,(2n+2)个CPⅢ点,(3n+1)个观测值,n个值。往返观测,值与观测值的个数为单程观测的2倍,多余观测数r=2×(3n+1)-(2n+2+2n)=2n。

图2 第一类网形单程观测示意
第二类以矩形法为代表,每测站观测4个CPⅢ点。如图3所示,n个测站下,CPⅢ点、值个数分别为2n+2和n,观测值个数为4n(同测站同一个CPⅢ点有多个水准尺读数时取均值作为一个观测值,下同)。多余观测数r=4n-(2n+2+n)=n-2,因此至少需要3个测站来确保网形有多余观测。而CPⅢ水准网,测站数远多于3,极易满足要求。

图3 第二类网形观测示意
《规范》要求与已知点联测方式通常为往返水准。在转点个数未知的情况下假设其个数为k,对于往返水准路线,如图4所示,共有(4k+4)个观测值,(2k+2)个值,k个未知高程点(CPⅢ点在上述网形中已作为未知点,这里不再重复考虑),多余观测数为r=k+2。综合考虑,附合到线路水准基点的CPⅢ水准网采用平差通用模型解算,多余观测充足,误差方程系数矩阵列满秩,法方程解唯一。

图4 往返水准观测示意
1.4 平差计算及精度评定
根据式(5)、式(6)和式(8)可构建误差方程的系数矩阵B、常数项l和权阵P,解法方程得
9)
进一步可求得观测值改正值

10)
单位权中误差为
11)

12)
相邻CPⅢ点间的高差平差值为
13)
由协因数传播率得
14)
则高差中误差为
15)
2 高差精度预估与闭合差限差推定
根据文献[3]统计的数据,在视距30 m的前提下,重复观测50次,电子水准仪读数平均误差θ=0.08 mm,由式(16)计算得单次观测水准尺读数中误差σ≈0.1 mm。
16)
设a1为后尺读数,a2为前尺读数,任意相邻点的高差h=a1-a2,使用误差传播定律得
17)
忽略一副水准尺的制造差异,在视距大致等于30 m的情况下,可以认为a1、a2误差均相等,均为σ。由式(17)得任意相邻点的高差中误差为
18)
每个CPⅢ点在单次观测的情况下,利用水准尺读数估算的相邻CPⅢ点间高差中误差约0.14 mm,满足《规范》不大于0.5 mm的要求。由误差传播律得相邻4个CPⅢ点构成的环闭合差中误差σW=2σh=0.28 mm,取3倍中误差为限差,其值不超过0.84 mm,小于《规范》规定的1 mm闭合差限差。
3 数据验证与分析
选取某客运专线2个分段的CPⅢ水准网原始观测数据对通用模型进行验证,观测网形均为单程矩形闭合环,联测水准基点的方式为往返观测。每个闭合环观测4段高差,便于在观测时进行闭合环闭合差检核。水准网具体信息见表1。

表1 水准网信息
其中,第一段水准网待求点中CPⅢ点为228个,另外4个为联测的高程未知的CPⅡ点。
3.1 计算流程
根据上面推导的数学模型,本文用Matlab编写平差通用模型程序。计算流程如下。
(1)读取原始观测数据,生成一个平差文件,该文件包含观测点名、水准尺读数、视距、测点的测站编号等信息。
(2)导入已知点高程数据,并对平差文件中的已知点高程进行赋值。
(3)进行测站观测限差、环闭合差、附合路线闭合差的检查,并计算每公里高差偶然中误差和全中误差判断是否超限。
(4)由平差文件组建法方程,解算高程及参数的平差值和精度。
(5)按测站搜索相邻的CPⅢ点,然后进行高差平差值以及其精度的计算。
(6)计算成果输出,绘制精度统计图。
3.2 计算结果对比分析
经检核,两段水准网附合水准路线闭合差、CPⅢ环闭合差及每千米水准测量偶然中误差和全中误差均满足精密水准测量要求后进行了平差解算。为检验通用模型解算成果的可靠性,本文以基于传统模型的 FSDI-GDPAS(中铁一院通用地面测量工程控制网数据处理自动化软件)平差成果作为实验的对比值。图5、图6分别显示程序解算的高程和高差与对应软件解算值的较差绝对值分布情况。高程和高差较差绝对值大部分集中在0~0.2 mm内,只有个别值分别落在0.3~0.5 mm和0.3~0.4 mm区间。通用模型解算的高程以及高差值已经非常接近软件解算成果。

图5 高程较差绝对值分布

图6 高差较差绝对值分布
通用模型解算的CPⅢ点高程中误差(也包含了第1段的4个CPⅡ点)与软件解算对比见图7。经统计,高程精度比软件计算平均约高0.04 mm。

图7 两种模型解算的CPⅢ高程精度对比
通过高程平差值协方差计算的相邻点间高差中误差与软件解算的中误差见图8,中误差均满足规范规定≯0.5 mm的要求,且精度不低于软件解算。说明通用模型计算结果是可靠的。
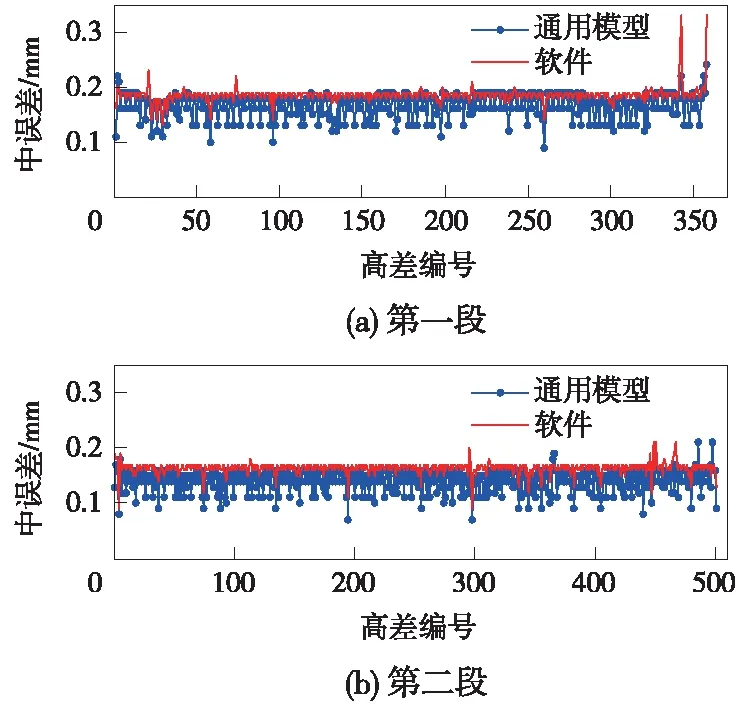
图8 两种模型解算的高差精度对比
现用自编程序从原始观测数据中随机抽取CPⅢ点一次的水准尺观测读数组成新的观测数据,用来模拟CPⅢ点单次观测的情形。依然使用原始实测数据的高程、高差软件解算值与单次观测下通用模型对应的解算结果作对比。图9、图10分别为通用模型解算的高程与高差和软件解算值的较差绝对值分布图。可以看出,高程较差绝对值大于0.2 mm的只有少数部分,均占其总体不到11%,同时高差较差绝对值大于0.2 mm的部分均不超过其总体的3%。

图9 单次观测下高程较差绝对值分布

图10 单次观测下高差较差绝对值分布
为检验单次观测下通用模型解算后的相邻CPⅢ点位高程相对关系是否可靠,从上述两段水准网高差平差值中提取相邻CPⅢ点间高差(第1段340个,第2段475个)与软件解算值进行对比。CPⅢ点间高差较差绝对值最大值及平均值如表2所示。两段水准网中相邻CPⅢ点间高差较差绝对值最大为0.34 mm,说明通用模型解算的相邻CPⅢ点间高差准确,不改变CPⅢ点位高程相对关系。

表2 单次观测下相邻CPⅢ点间高差较差绝对值比较
表3显示通用模型解算的两段单次观测水准网相邻CPⅢ点间的高差中误差,显然满足规范≯0.5 mm的精度要求。综合考虑,通用模型解算单次观测的CPⅢ水准网是可行的。

表3 单次观测下通用模型解算的相邻高差中误差
4 结论
本文提出的CPⅢ水准网平差通用模型,完全避免了观测值相关的可能性,可适用于目前各类CPⅢ水准网形。经过实测数据检验,该模型解算的高程、高差值均可靠,且在精度上略高于传统CPⅢ水准网平差模型。
CPⅢ水准网平差通用模型算法流程简单,直接提取原始观测文件中的水准尺读数开列误差方程,而传统模型平差前需要对高差进行预处理,如搜索同名高差并取均值然后重新定权等过程。另一方面,计算一个高差需要2把水准尺的读数,相比以高差为观测值的传统平差模型,通用模型数据利用率高。
精度估算和数据验证均表明,在现代电子水准仪单次测量可靠性高的前提下,用CPⅢ水准网平差通用模型处理单次观测的CPⅢ水准网时,解算值是可靠的。这解决了以往传统CPⅢ水准网平差时要求高差观测值独立,CPⅢ点需要重复观测的问题,可降低对观测数据量的要求,提高现场实测效率。
猜你喜欢
测绘地理信息(2022年2期)2022-04-02
煤气与热力(2021年10期)2021-12-02
小学生学习指导·低年级(2021年6期)2021-09-10
导航定位与授时(2020年4期)2020-07-29
装饰装修天地(2020年11期)2020-07-04
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
全球定位系统(2020年1期)2020-03-31
中国绿色画报(2017年9期)2017-09-16
房地产导刊(2015年6期)2015-10-21
物理教学探讨(2014年2期)2014-05-22
