
多传感器时滞系统CI融合滤波算法
2019-05-16 08:12李璇烨高国伟
北京信息科技大学学报(自然科学版) 2019年2期
李璇烨,高国伟
(北京信息科技大学 传感器重点实验室,北京 100101)
0 引言
多传感器的数据融合问题,就是如何组合局部观测,或是如何使局部状态估值器精准地得到一个融合的状态估值器,最终使融合得到的精度要比每一个局部状态估值器得到的精度都高。在多传感器信息传输时,会存在时滞现象,时滞现象是引起系统性能差以及不稳定的主要原因。因此,在对多传感器信息进行融合时,消除系统中的状态滞后与观测滞后成为当前研究的热点[1-4]。文献[5]对于离散系统提出了线性最小方差估计(Kalman滤波),由2个同系统同等维数的立卡提方程求得最优估值器,它远远小于系统增广方法的计算负担。孙书利等[6]提出了在状态噪声与观测噪声不相关时按标量加权融合算法,该算法计算负担小,有利于随时应用。但该算法没考虑到局部估计误差相关性[7-9]。
考虑到目前分布式估计研究现状,本文在分布式融合框架下,对带有多传感器时滞系统融合估计问题展开研究。针对带有网络诱导时延无线传感器网络和不确定模型,本文提出了一种基于分布式协方差交叉(covariance intersection,CI)融合滤波估计方法。
1 问题阐述
考虑带有L个传感器的离散多重时滞随机系统
(1)
i=1,2,…,L
(2)
式中:x(t)∈Rn为系统的状态;y(i)(t)∈Rmi为第i个传感器的观测;白噪声v(i)(t)∈Rmi及ω(t)∈Rr(i=1,2,…,L)分别为第i个传感器的观测噪声与系统噪声;φk(t)、γ(t)和hk(i)(t)为维数适当的时变矩阵;d≥0为最大状态滞后,di≥0为第i个传感器的最大观测滞后(i=1,2,…,L)[10]。
假设1ω(t)∈Rr和v(i)(t)∈Rmi(i=1,2,…,L)是零均值的相关白噪声,即
(3)
式中:Qv(ij)(t)=Qv(i)(t);E为期望;δtk为Kronecker delta函数。

(4)
X(t+1)=Φ(t)X(t)+Γ(t)ω(t)
(5)
(6)
其中
(7)
对多传感器时滞系统的融合滤波,就是在假设1与假设2下,求CI融合Kalman滤波算法。

(8)
对于系统(2),当di=0时,观测时滞消失,只剩下状态时滞,因此可以得到带有L个传感器的离散状态时滞随机系统:
(9)
y(i)(t)=H(i)(t)X(t)+v(i)(t)
i=1,2,…,L
(10)
对于系统(1),当d=0时,状态时滞消失只剩下观测时滞,因此可以得到带有L个传感器的离散观测时滞随机系统:
x(t+1)=Φ(t)x(t)+Γ(t)ω(t)
(11)
i=1,2,…,L
(12)
2 局部最优稳态Kalman滤波器
引理1在假设1与假设2情况下,增广系统具有最优Kalman滤波器[11]:
K(i)(t+1)ε(i)(t+1)
(13)
(14)
ε(i)(t+1)=Y(i)(t+1)-
H(i)(t+1)X(i)(t+1|t)
(15)
K(i)(t+1)=P(i)(t+1|t)H(i)T×
(16)
H(i)T(t+1)+QV(t+1)
(17)
(18)
P(i)(t+1|t+1)=[In-K(i)(t+1)×
H(i)(t+1)]1(i)(t+1|t)
(19)
引理2对于系统(5)与系统(6)的局部稳态Kalman一步预报器为[11]
(20)
Ψpi=Φ[In-KHi],Kpi=ΦKi
(21)
(22)
式中Σi满足稳态Riccati方程:

ΦT+ΓQΓT
(23)
3 CI融合Kalman滤波器
在两传感器系统中,当2个传感器各自的协方差P1、P2均已知,互协方差P12未知时,应用CI方法[13-15],可以得到CI融合稳态Kalman滤波器为
(24)
(25)
式中ω为权系数,且0≤ω≤1。

(26)
(27)
将式(24)与式(25)相比,若将P1-1和P2-2分别放大ω和1-ω倍,即分别令
(28)
则由式(25)定义的PCI-1可由不相关估值式(26)的形式来表示,即
(29)

(30)
将式(28)代入式(29)与式(30)中,最后可以得到CI融合算法为
(31)
(32)
极小化性能指标为
(33)
对非线性最优化问题,可用黄金分割法[12]进行快速搜索而得到最优权系数ω0。
本文分别采取ω=0.1,0.2,…,0.9进行搜索,取得最优权系数ω0=0.391 36。
4 精度分析

(34)
(35)
定理2局部融合Kalman滤波器之间精度关系[15]
(36)
5 仿真结果与分析
基于传感器网络场景中的移动目标的追踪问题,建立了3个传感器节点分别对移动中的目标运动状态进行采样,其系统方程可近似的表示为
(37)
i=1,2,3
(38)

将该系统转化为无滞后系统为
X(t+1)=Φ(t)X(t)+Γ(t)ω(t)
(39)
Y(i)(t)=H(i)(t)X(t)+V(i)(t)
i=1,2,3
(40)
其中
状态系统中各参数分别为
观测系统由三传感器组成,分别进行移动目标位置、速度与加速度的监测,模型中各观测矩阵与噪声方差参数分别选取为
使用该模型进行100次仿真。为了表明所提出
的分布式CI融合滤波算法的有效性,与分布式加权融合方法进行了比较,结果如图1与图2所示。
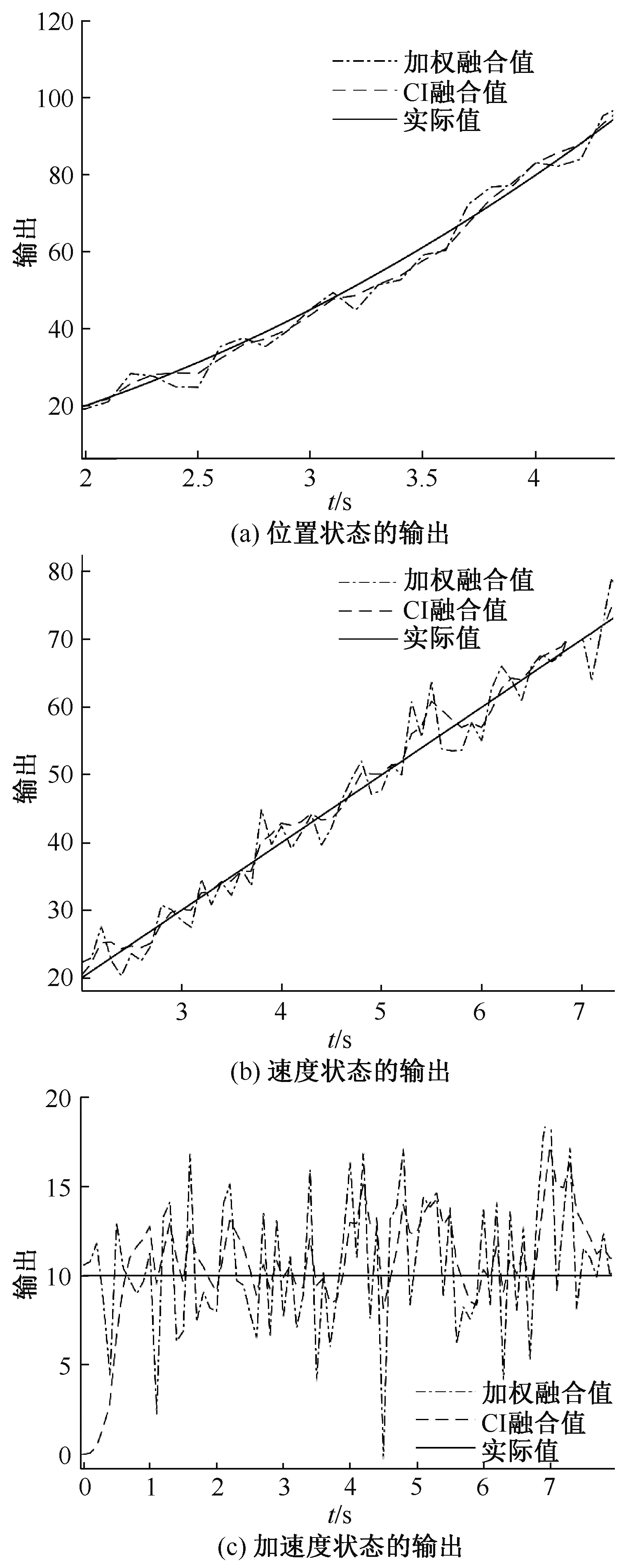
图1 两种方法对位置、速度、加速度状态的估计
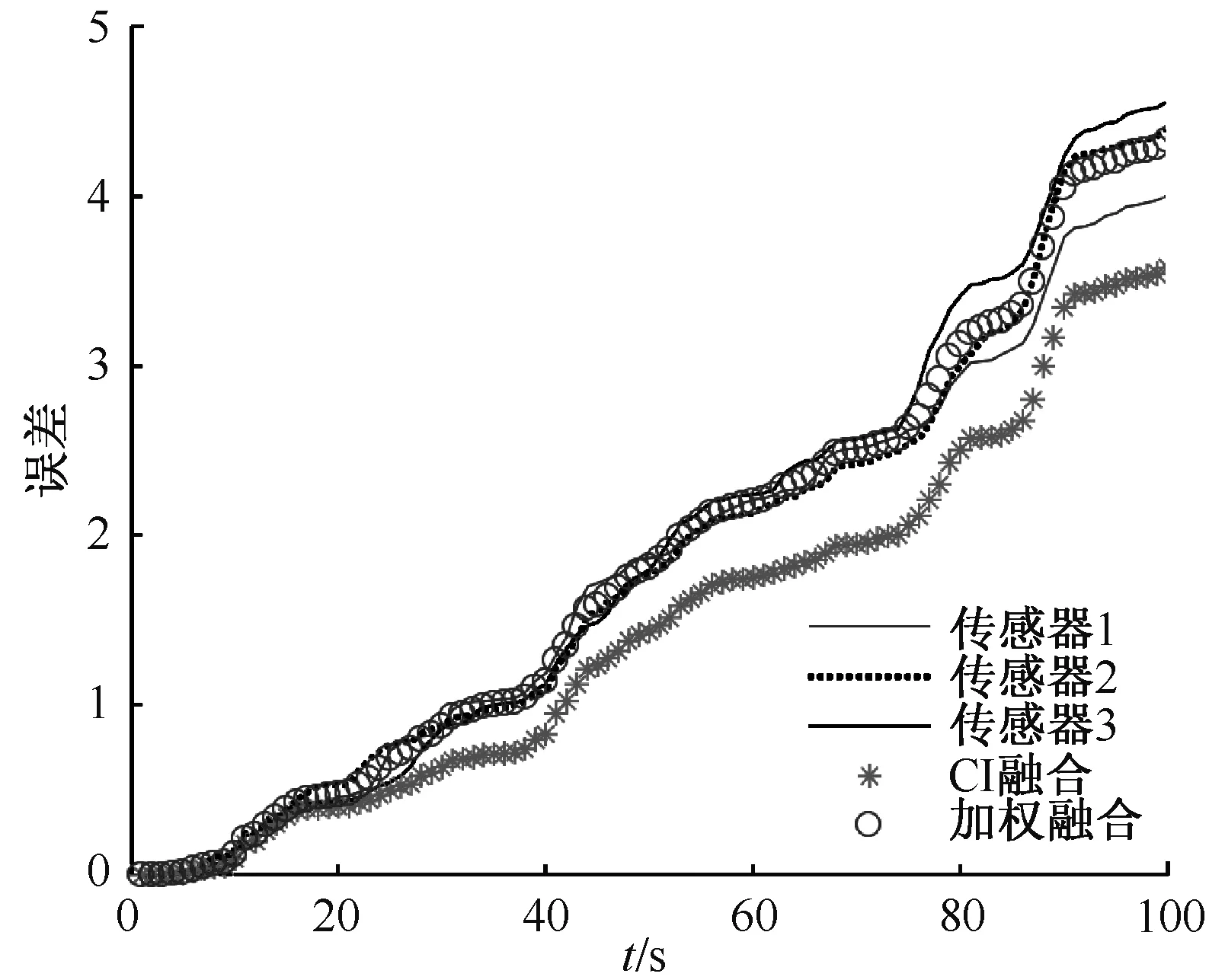
图2 三传感器局部融合Kalman滤波器与CI融合估值器MSE曲线比较
由图1可知,在系统存在时间滞后的情况下,本文提出的分布式CI融合估计算法具有很好的跟踪效果;另一方面,局部估计和融合估计的误差协方差如图2所示,CI融合的MSE曲线是处于每一个局部MSE曲线以及加权融合后的MSE曲线的最下方,可知CI融合器实际的精度高于每一个局部滤波器的精度,且接近最优融合器的精度;而且对任意互协方差,相对应的CI融合器可能的最差精度依旧高于每一个局部滤波器的精度。
6 结束语
本文针对带观测滞后与状态滞后的三传感器系统,设计了一种具有一致性的CI融合稳态Kalman滤波器。该算法利用增广矩阵将时滞系统化为非时滞系统,并且由于CI算法可不必计算局部估计的互协方差,因此大大减轻了计算量,也节约了计算时间。并证明了该滤波器的精度比每一个局部Kalman滤波器的精度都要高。仿真结果表明,它的精度非常接近于最优融合Kalman滤波器的精度,所以其性能较好,有一定的实用价值。
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
山花(2022年5期)2022-05-12
艺术家(2021年8期)2021-11-27
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
散文诗(2020年1期)2020-07-20
装备环境工程(2020年3期)2020-04-03
上海师范大学学报·自然科学版(2018年3期)2018-05-14
东方艺术·国画(2016年3期)2017-02-08
