
多平台多传感器相互引导目标搜索策略研究
2019-05-15 03:33:02张怿颋何建华陶思琦姬文生陈利斌
西北工业大学学报 2019年2期
张怿颋, 何建华, 陶思琦, 姬文生, 陈利斌
(1.西北工业大学 电子信息学院, 陕西 西安 710072; 2.中国船舶工业系统工程研究院, 北京 100094)
多平台多传感器相互引导是协同搜索与跟踪的一种重要方式,即利用指示传感器观测获得的信息引导异平台传感器迅速对准目标进行探测搜索并确认是否捕获该目标。其中,指示传感器引导异平台传感器最终捕获目标的概率(即成功引导概率)是判定多平台多传感器相互引导性能的重要指标。
作为多平台多传感器相互引导的基础,单平台下主要研究了单目标情况下ESM对2D雷达、IRST对3D雷达的引导成功概率及其随某些参数变化的规律[1-3],探讨了存在干扰目标时IRST引导雷达的性能[4]。多平台多传感器目标引导分别分析了平台间ESM、IRST对雷达的指示引导问题,推导出测角误差传递方程和成功引导概率并进行仿真[5-6];文献[7]探讨了多平台异平面传感器的引导问题,给出了引导误差传递公式和多平台下测角转换方程;探讨了多平台多传感器的数据配准问题[8]。文献[9-10]研究了传感器指示引导下雷达的搜索空域及策略;雷达组网的引导过程主要包括引导信息及坐标转换、雷达搜索过程中的波位编排[11]。文献[12]分析了不同种类传感器相互引导的重要作用。针对具体场景,进一步探究异传感器间的引导问题并研究其实现方法[13-14]。
现有文献在研究传感器引导雷达的搜索策略时多只研究单平台多传感器的相互引导,对引导搜索雷达波位编排的研究也局限于单平台情况;在分析运动目标在搜索空域的出现概率密度及成功引导概率过程中由于公式推导不严谨而存在不精确的问题。因此,本文详细分析及推导精确的运动目标指示空域分布概率、完善成功引导概率方程,探究多平台异平面多传感器相互引导的原理与过程,给出以引导中心为起始波位、距离递进搜索且控制单波位误交接概率水平的雷达搜索策略并进行仿真验证。
1 传感器引导模型
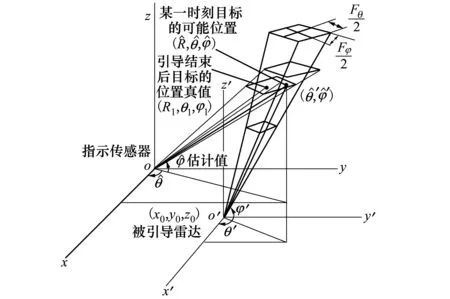
图1 多平台下传感器引导雷达的空间关系示意图
1.1 引导误差分析

(1)
(2)
(3)
则目标在被引导雷达坐标系内的方位、俯仰方差为
1.2 引导成功概率分析
由上述推导可知,目标i出现在指示引导空域的概率密度可作如下表示
fi(θ′,φ′)=
(6)
考虑相对运动误差时目标方位角的概率密度
fi(θ′)=
(7)
考虑相对运动误差时目标俯仰角的概率密度
fi(φ′)=
(8)
则目标出现在指示空域的概率密度可表示为:
(9)
设目标方位真值处于被引导雷达方位探测范围内的事件为Xθ,目标俯仰真值处于雷达俯仰探测范围内的事件为Xφ。令Fθ/2=Fθ/2,并将单个目标的(Sθmi,Sφmi)简写为(Smθ,Smφ),则引导结束时待捕获目标仍处在被引导雷达视域内的概率为:
(10)

(11)

(12)
同理有
(13)
则成功引导概率可表示为
(14)
接着定义判决空域A0,即被捕获的引导交接目标所在的空域。用fi(a)表示(9)式,Pi表示目标i在某一空域Ak的分布概率:
(15)
为保证目标交接在多目标情况下能准确完成,定义
(16)
1.3 搜索空域与误交接概率分析
在指示传感器提供待捕获目标的方位、俯仰引导信息并转换到被引导雷达坐标系下后,相控阵雷达依靠优越的波束捷变能力在指定空域内按照特定的搜索策略对目标进行扫描搜索,当引导成功概率达到某一门限值时即可宣告捕获完成。

N0=T0/t0
(17)
在多目标环境中,被引导雷达在指示引导空域内对待捕获目标(记为第0号)若只追求其高探测概率,则有可能导致对非待捕获目标也是高探测概率,进而可能导致捕获失败。

(18)
(19)
在传统工程应用中,搜索空域的确定一般采用“3σ”准则,即取(θ,φ)=±3σ,其中σ为引导信息的测角均方差。当考虑载机平台与目标之间的最大相对运动偏差(Sθmi,Sφmi)时,搜索空域的大小应更正为:θi=±3(σθi+Sθmi),φi=±3(σφi+Sφmi)。相控阵雷达因其灵活的波束捷变能力,在引导过程中通过合理的搜索策略,可以先搜取目标分布概率高的区域,因此一开始搜索空域是不定的。
2 引导雷达搜索策略
2.1 引导搜索策略优化
被引导雷达的搜索策略包括波束搜索的起始位置及其照射顺序。当待搜索空域内存在多个目标时,设定如下搜索策略:当被引导雷达对0号目标的捕获概率满足一门限值(记为P0)后,停止增加新的搜索波位;多目标情况下,控制单个波位误交接概率在一门限值Pwjjpd以下,从而更为精确地使整个搜索空域的误交接概率降低到一个可接受范围;用时效性要求抑制搜索波位数的增长。
搜索策略优化的理论公式如下:
Ωini=argmaxPd
(20)
式中,Ωini表示初始捕获概率最大的波位,并作为雷达搜索的起始波位。
2.2 仿真计算流程
被引导雷达搜索策略优化流程如下:
1) 以引导信息给出的目标位置为初始搜索波位中心,已知雷达在该波位上的捕获概率最大,以该波位(记为Ω1)为搜索中心进行波位编排,搜索空域Ω由流程中所有雷达波束照射过的位置构成。
2) 计算当前搜索波位内的误交接概率,判断其是否在单个波位误交接概率门限内。
7) 重复仿照步骤5)~步骤6)进行搜索,直到
3 仿真分析
由于不同探测精度的传感器都可以为搜索雷达提供引导信息,本文分别选择IRST、ESM和雷达作为指示传感器,设置2种场景进行仿真验证。设引导信息提供的待捕获目标的位置估计值为[54°,37°]。由于IRST测角精度较高,假设其测角标准差为[0.3°,0.3°];ESM精度较差,假设其测角标准差为[2°,2°];指示雷达精度介于IRST和ESM之间,假设其测角标准差为[1°,1°]。设被引导雷达瞬时视场大小为1°×1°,捕获概率门限为80%,引导有效波位数为60,单个波位波束驻留时间为5 ms。假设被引导雷达在指示传感器坐标系中的位置(x0,y0,z0)=(1 000 m,2 000 m,-1 000 m),位置标准差σx0,σy0,σz0均为50 m;目标斜距估计值R=50 000 m,标准差σR=100 m,目标与平台相对运动最大偏差Sm为[0.5°,0.5°]。
场景1 当交接空域仅存在待捕获目标时,分别令IRST、ESM和指示雷达牵引雷达对目标进行搜索。

图2 多平台单目标IRST引导雷达的波位编排 图3 多平台单目标ESM引导雷达的波位编排 图4 多平台单目标雷达引导雷达的波位编排
图2~4为多平台单目标情况下IRST、ESM、雷达3种传感器引导雷达搜索的波位编排结果。多平台条件下引导信息经过坐标系转换,待捕获目标的方位、俯仰位置变为[53.44°,39.49°]。当IRST引导雷达时,测角精度转换为σθ=0.326 5,σφ=0.312 1,经过4个波位捕获目标,引导捕获概率为84.29%,成功引导时间为20 ms;ESM引导时,测角精度转换为σθ=2.118,σφ=2.044,经过46个波位捕获目标,引导捕获概率为80.4%,成功引导时间为230 ms;雷达引导时,测角精度转换为σθ=1.061,σφ=1.023,经过14个波位捕获目标,引导捕获概率为81.6%,成功引导时间为70 ms。3种传感器引导概率比较结果如图5所示。
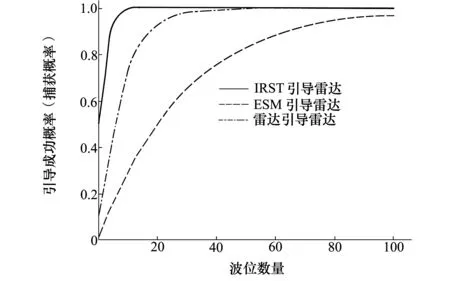
图5 单目标3种传感器引导雷达成功概率
图2中的线框是传统搜索策略采用的3σ准则划定的搜索空域,经计算可知:传统搜索方式下IRST、ESM、雷达引导时分别需用25、225、81个波位完成捕获。对比可得,本文提出的搜索策略缩小了空域搜索范围,最大程度上节约了雷达搜索资源,提高了搜索效率。
场景2 当传感器引导雷达的探测范围内存在干扰目标时,不同的指示传感器因其精度不同,最终的引导搜索效果也不同。假设指示传感器在待测目标附近探测到2个干扰目标,IRST因其精度较高,所测干扰目标距待捕获目标较近;雷达、ESM因其精度较低,所测干扰目标偏离较远。当考虑误交接概率时,因干扰目标相对位置及传感器测角精度不同,分别设IRST、雷达、ESM引导下的单个波位误交接概率门限为:30%,40%,50%。
图6~8为多平台多目标情况下IRST、ESM、雷达3种传感器引导雷达搜索的波位编排结果,其引导性能比较如表1所示。其中:Pwjj1为不考虑Pwjjpd的传统搜索策略的总误交接概率;Pwjj2为考虑Pwjjpd的总误交接概率。由表可知:3种传感器引导雷达在本文所提搜索策略下搜索的总误交接概率相较于传统搜索策略均有大幅度降低,并且在测角误差高的情况下效果更为显著。

图6 多平台多目标IRST引导 图7 多平台多目标ESM引导 图8 多平台多目标雷达引导 雷达的波位编排 雷达的波位编排 雷达的波位编排
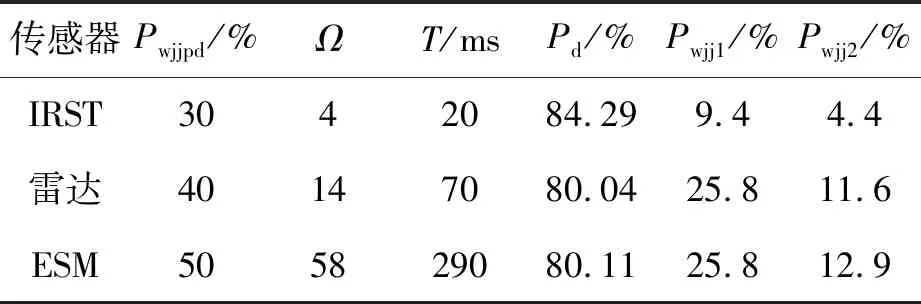
表1 多目标3种传感器引导性能比较
实际引导中,单个波位误交接概率门限Pwjjpd的值需要谨慎选取。当Pwjjpd过大时,可能会导致被引导雷达对待捕获目标分布概率较低的波位进行“多余搜索”;Pwjjpd过小时,又会使被引导雷达在搜索过程中忽略一些待捕获目标实际分布概率较高的波位。对于Pwjjpd的选取,一个先决原则是:所选指示传感器测角误差越大,Pwjjpd应适当调高;指示传感器测得干扰目标距待捕获目标越远,Pwjjpd应适当调低。总体上应保证在引导时效性要求内能够成功捕获目标,同时控制总误交接概率在一个较低范围内。
4 结 论
文章探讨的核心问题是当真实战场环境中存在多个运动目标时,选定平台传感器如何引导异平台雷达对待捕获目标进行快速、及时、准确地搜索捕获。以传感器引导模型为基础,对多平台多传感器相互引导的目标搜索策略展开研究,分析平台间引导误差传递,构建目标空域分布概率模型;推导成功引导概率及误交接概率,进一步给出以引导中心所在波位为起始、距离递进搜索且控制单波位误交接概率水平的引导雷达搜索策略。多场景仿真表明该搜索策略在确保成功捕获目标的同时,满足引导时效性要求、极大地节约了雷达搜索资源且降低了整个搜索过程的误交接概率;仿真过程中动态更新目标空域分布概率并记录,具有良好的实时性和存储性。所提引导搜索策略可用于多平台多传感器协同搜索动态规划软件设计工程。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11
测绘科学与工程(2016年6期)2016-04-17 06:51:25
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14
火控雷达技术(2016年3期)2016-02-06 02:30:26
