深水钻井平台-张紧器-隔水管耦合系统动力学特性分析
2019-05-13 08:38:44张慎颜刘秀全畅元江马秀梅陈国明
中国石油大学学报(自然科学版) 2019年2期
张慎颜, 刘秀全, 畅元江, 马秀梅, 刘 康, 陈国明
(中国石油大学(华东)海洋油气装备与安全技术研究中心,山东青岛 266580)
深水钻井隔水管系统是连接钻井平台和水下井口系统的重要组成部件,在钻井作业过程中可能受到波浪、海流等多种复杂载荷的联合作用,是整个海洋浮式钻井系统中最为薄弱的部分;隔水管系统作业时受到复杂的海洋环境载荷激励和平台运动激励,这些载荷会对隔水管系统的稳定性和作业安全产生较大的影响,因此精确预测隔水管系统的动态响应,对钻井作业安全顺利进行具有重要意义[1-5]。目前国内外学者针对钻井隔水管系统静力学和动力学做了大量研究工作。Kozik等[6]建立了张紧器系统刚度变化模型,研究气体压力变化对张紧力的影响,但并未将其引入到隔水管分析模型中;Atadan等[7]将平台、隔水管系统简化成悬臂梁,并对系统响应进行量化分析,但分析模型中忽略了张紧器与平台和隔水管的耦合作用;Low等[8-9]提出了深水浮式生产系统的时域和频域耦合分析法,建立平台、锚泊系统以及立管全耦合分析模型,但全耦合分析模型中并未考虑张紧器的作用;Pestana等[10]建立了张紧器系统阻尼模型并在隔水管紧急解脱分析模型中应用,仅研究了阻尼系统对隔水管系统应急解脱回弹响应的影响。畅元江等[11-13]基于有限元软件模拟在平台和随机波浪共同作用下的深水钻井隔水管动态响应,模型中将平台运动作为边界条件施加在隔水管系统顶部,模型中并未考虑张紧器系统对模型的影响;Sun等[14]建立了深水系泊钻井系统的全耦合模型,研究耦合系统的非线性时域特性,模型中重点考虑锚链、平台、隔水管的耦合作用,并未在模型中引入张紧器系统;刘秀全等[15]建立深水钻井平台-隔水管耦合系统漂移力学模型进行漂移预警界限分析,耦合模型中考虑了平台和隔水管的耦合作用,但简化了张紧器系统的对平台和隔水管的耦合作用。在静态分析和动态分析中,传统分析方法忽略了张紧器系统对隔水管的作用力以及张紧器系统对平台运动的传递,直接在隔水管顶部施加恒定张力和运动边界[16-17],用以求解隔水管的力学响应特征;但是在实际作业过程中由于激励载荷的变化以及平台运动导致隔水管顶部受到的张紧力不断变化,因此传统分析中施加恒定张力和运动边界的方法不能够精确反应隔水管系统响应规律。笔者在传统隔水管系统力学研究的基础上,充分考虑平台、张紧器、隔水管的耦合作用,重点解决隔水管系统模型边界处理问题,建立钻井平台-张紧器-隔水管耦合系统动力学模型;进一步将深水钻井平台的六自由度运动模型引入到隔水管系统的有限元模型中,精确确立钻井隔水管系统的边界条件,更加准确地分析隔水管系统在波浪、海流联合作用下的动力学特性。
1 深水钻井平台-张紧器-隔水管耦合系统数学模型
图1为深水钻井平台-张紧器-隔水管耦合系统示意图。深水钻井隔水管系统主要由上挠性接头、张紧器系统、隔水管裸单根和浮力单根、下挠性接头、底部隔水管总成以及防喷器组等结构组成。隔水管系统上部通过上挠性接头和张紧器系统与钻井平台连接,隔水管系统底部通过底部隔水管总成与井口防喷器组连接。张紧器系统是连接隔水管与平台的重要部件,平台与隔水管系统之间的运动和相互作用通过张紧器系统传递;在进行正常钻井作业时,需要张紧器系统在隔水管系统上端提供轴向张力,同时保证钻井平台在运动时施加在隔水管系统上端的轴向张力基本保持不变,以确保隔水管系统结构稳定性[13]。因此,为了考虑平台、张紧器、隔水管之间的耦合作用关系,提高隔水管系统力学分析精度,需要建立深水钻井平台-张紧器-隔水管耦合系统数学模型。
1.1 深水钻井平台-张紧器-隔水管耦合系统运动方程
采用有限元法进行深水钻井平台-张紧器-隔水管耦合系统动力学分析,将耦合系统矩阵分为平台和隔水管系统两部分进行描述,耦合系统运动方程[9, 18]可表示为
(1)
Ften=Ft1+Ft2+Ft3+Ft4+Ft5+Ft6.
(2)

平台和隔水管系统的外部载荷可根据海洋环境载荷计算,其中计算隔水管外部海洋环境载荷时须考虑结构与流体之间相对速度与加速度,一般采用Morison方程进行计算作用在隔水管系统上的环境载荷力,可表示为[19]
(3)

平台和隔水管之间的耦合作用载荷(张紧器载荷)需要进一步建立张紧器系统数学模型,分别计算每个张紧器液压缸张力向量。

图1 深水钻井平台-张紧器-隔水管耦合系统示意图Fig.1 Schematic diagram of deepwater drilling platform/tensioner/riser coupling system
1.2 张紧器系统数学模型
深水钻井平台隔水管系统张紧装置主要采用直接作用式张紧系统,直接作用式张紧系统主要由液压缸、低压蓄能器、控制阀、空气瓶等组成[20]。图2为张紧器系统工作原理简化示意图,张紧力受控制阀阀口开度、空气瓶数量、高压气体体积以及活塞位移等多种因素影响。
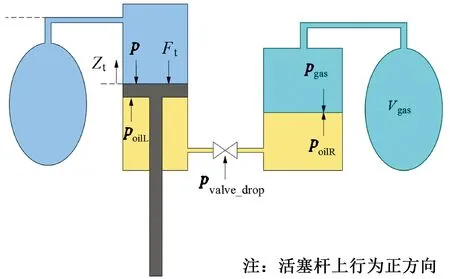
图2 张紧器系统工作原理简化图Fig.2 Simplified diagram of tensioner system working principle
张紧器系统的张紧力是由液压缸活塞两端的压力差提供的,忽略液压系统的摩擦阻力,张紧器活塞上的张紧力可表示为
(4)

活塞杆向上运动时,液压缸有杆腔液体压强为
poilL=poilR-pvalve_drop=pgas-pvalve_drop.
(5)
式中,poilR为高压蓄能器中的工作液压油压强,Pa;pvalve_drop为控制阀阀体局部压力损失,Pa;pgas为任意时刻下高压工作气体压强,Pa。
活塞杆向下运动时,液压缸有杆腔液体压强为
poilL=poilR+pvalve_drop=pgas+pvalve_drop.
(6)
控制阀阀体局部压力损失pvalve_drop为[21]
(7)

任意时刻下高压工作气体压强pgas为
(8)
式中,pgas0和Vgas0分别为高压工作气体的压强和初始体积;Vgas为高压工作气体的当前体积,m3;Zt为活塞杆位移,m;γ为气体绝热常数。
当工作空气瓶气体状态发生变化以及张紧器系统压力产生损失时,张紧器刚度发生变化,导致张紧系统的刚度发生变化,因此张紧器系统的刚度并不是一个恒定值。
2 深水钻井平台-张紧器-隔水管耦合系统力学分析
基于张紧器系统的位置分布以及与平台和隔水管的连接方式,充分考虑张紧器系统与半潜式平台复杂的多体耦合效应,建立张紧器系统力学模型,分析张紧器系统刚度的变化规律;以深水钻井平台-张紧器-隔水管耦合系统动力学运动方程为基础,建立深水钻井平台-张紧器-隔水管耦合系统动力学模型,考虑张紧器系统非线性刚度变化对多体耦合系统动力学特性的影响,分析耦合状态下隔水管系统动力学响应。
基于张紧器系统理论分析模型采用MATLAB软件建立隔水管张紧器系统动态分析模型,输入活塞杆初始位移等相关参数,依据外部激励信号研究张紧器系统局部压力损失和气体压强变化等,确定张紧器系统张紧力和张紧器刚度随活塞杆位移动态变化规律。
图3为平台-张紧器-隔水管耦合系统动力学模型建模分析流程。采用SESAM软件建立深水钻井平台-张紧器-隔水管系统耦合系统动力学分析模型,运用HydroD模块中Wadam程序对钻井平台进行无航速水动力计算,计算出平台运动响应、附加质量以及阻尼系数等相关水动力参数;在DeepC模块中建立隔水管系统模型和张紧器模型,引入钻井平台六自由度运动模型并施加到隔水管有限元模型中,建立完整的深水钻井平台-张紧器-隔水管耦合系统动力学模型,并进行隔水管系统动力学分析。
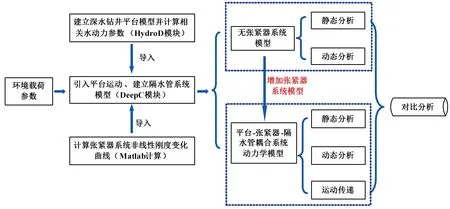
图3 平台-张紧器-隔水管耦合系统分析流程Fig.3 Analysis flow chart of platform/tensioner/riser coupling system
根据隔水管系统设计配置采用残余张力法计算连接状态下隔水管系统所需要的张紧力[22],根据张紧器非线性刚度变化规律进行张紧器刚度配置,建立张紧器系统精细化模型如图4所示,图中张紧器系统上端与平台相连接,下端与隔水管系统相连接;建立深水钻井平台-张紧器-隔水管耦合系统分析模型如图5所示,在分析模型中引入平台6自由度运动模型和张紧器系统精细化模型。
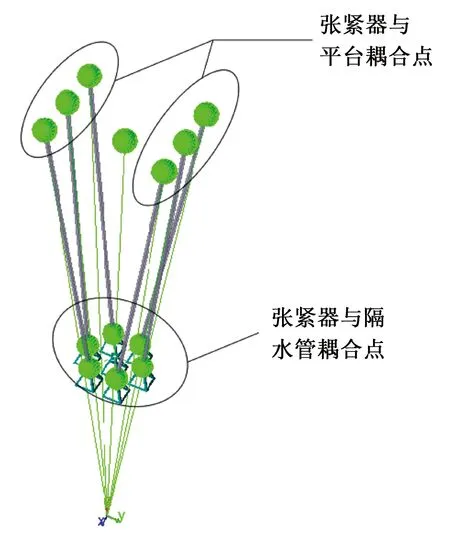
图4 张紧器系统精细化模型Fig.4 Refined model of tensioner system
3 算例分析
3.1 基础数据
南中国海某深水钻井平台作业目标水深为1 049 m,作业海域海流水深分别为0、25、247、411、576和1 048 m,对应流速分别为1.07、1.03、0.79、0.55、0.54和0.31 m/s。波浪JONSWAP谱参数(一年一遇海况)分别为峰升高因子γ、有效波高Hs和平均周期Tp,其数值分别为3.3、6 m和12 s。隔水管系统基本参数见表1。算例中假定海流和波浪入射方向相同,且沿x轴正方向入射(图1)。
根据张紧器系统数学模型分析结果可知,张紧器系统刚度随活塞杆位移变化曲线呈非线性关系,耦合分析模型中采用非线性刚度张紧器模型,模型中张紧器系统张紧力随活塞杆位移变化如图6所示。

图5 深水钻井平台-张紧器-隔水管耦合系统分析模型Fig.5 Analysis model of deepwater drilling platform/tensioner/riser coupling system
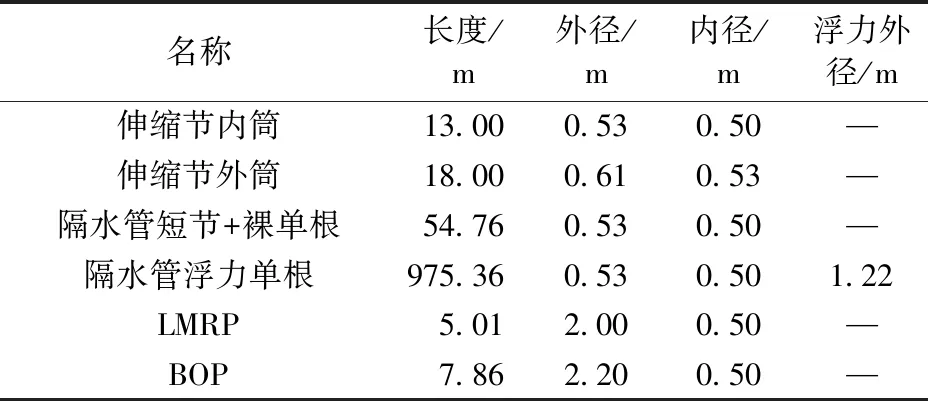
名称长度/m外径/m内径/m浮力外径/m 伸缩节内筒13.000.530.50— 伸缩节外筒18.000.610.53— 隔水管短节+裸单根54.760.530.50— 隔水管浮力单根975.360.530.501.22 LMRP5.012.000.50— BOP7.862.200.50—
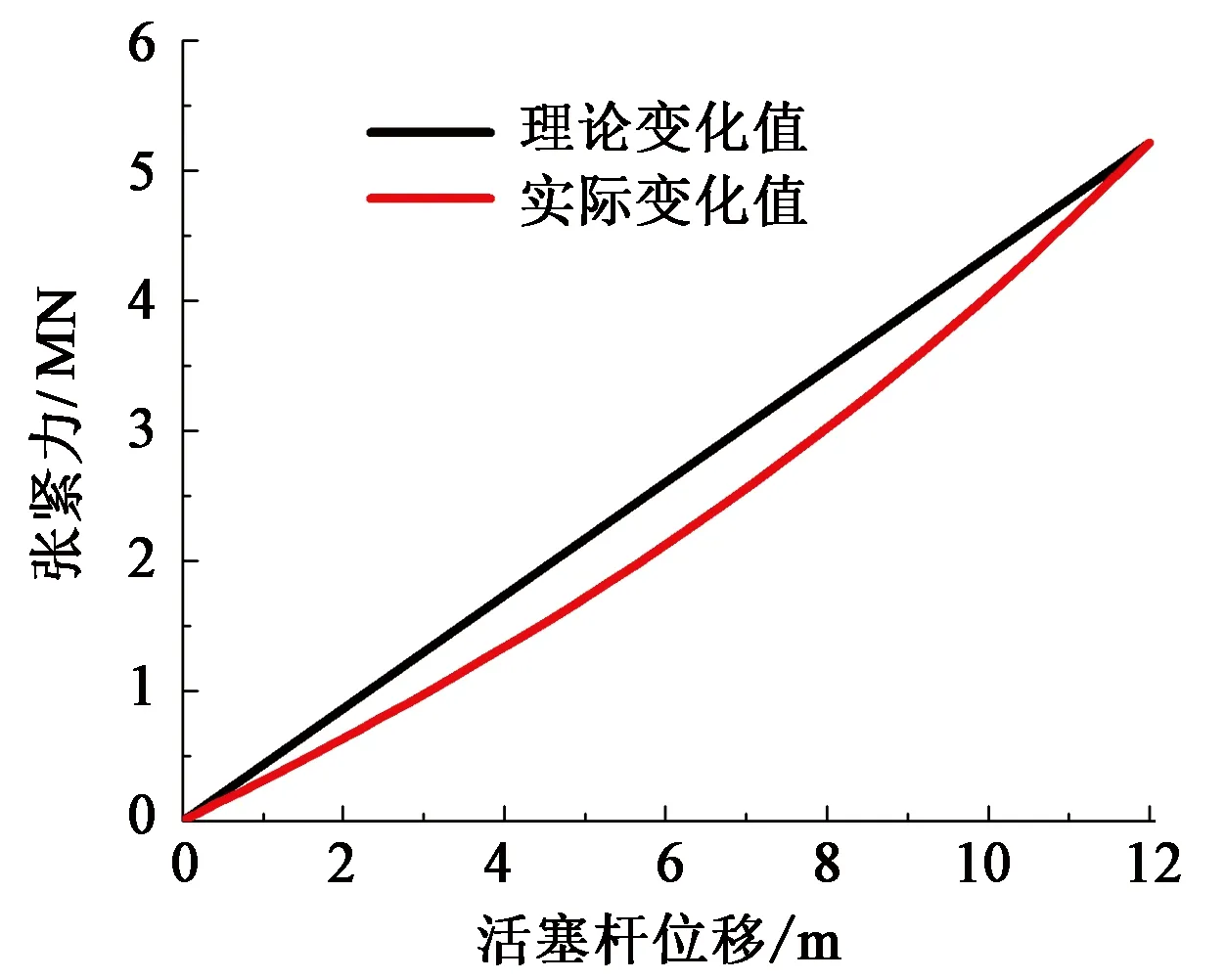
图6 张紧力随活塞杆位移变化曲线Fig.6 Tension change curve with piston rod displacement
3.2 隔水管系统静态分析
图7和图8分别为有张紧器和无张紧器系统时隔水管系统偏移和隔水管系统弯矩变化,其中有张紧器系统时隔水管顶部张力由张紧器系统提供;无张紧器系统时隔水管系统上部施加恒定张力,恒定张力值取有张紧器系统时隔水管系统上部的垂向作用力;整体上,在有、无张紧器系统工况下隔水管系统偏移变化和弯矩变化规律基本相同。
由图7可知,有、无张紧器系统工况下隔水管系统发生最大偏移位置基本相同,有张紧器系统工况下,隔水管系统最大偏移为12.78 m,发生偏移位置为水深420.45 m处;无张紧器系统工况下,隔水管系统最大偏移为13.58 m,发生偏移位置为水深406.45 m处。与有张紧器系统工况相比,无张紧器系统工况下隔水管系统偏移较大,耦合模型中隔水管系统最大偏移减小6.4%,主要原因是张紧器系统能够为隔水管系统提供与偏移方向相反的横向作用力,对隔水管系统的偏移起到抑制作用,减小隔水管系统偏移。
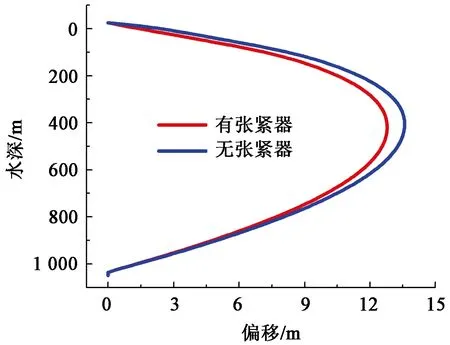
图7 有无张紧器工况下隔水管系统偏移变化Fig.7 Offset of riser system with or without tensioner

图8 有无张紧器工况下隔水管弯矩变化Fig.8 Bending moment of riser system with or without tensioner
根据图7可知,隔水管系统最大偏移位置发生在水深为400~500 m,为对比分析隔水管系统弯矩变化,提取水深200~800 m处隔水管系统弯矩,如图8所示。由图8可知,在相同水深位置处,有张紧器系统的隔水管弯矩略小于无张紧器系统的隔水管弯矩,因此张紧器系统提供的横向作用力能减小隔水管系统弯矩。即传统分析计算结果偏大,耦合动力学模型更能精确描述隔水管系统力学特性。
为进一步分析耦合分析模型和传统分析模型结果偏差对实际作业所产生的影响,进行连接状态下隔水管系统钻井作业范围分析,隔水管系统在连接状态下钻井作业的限制因素主要为上、下挠性接头转角,最大转角限制为2 °[17, 23-24]。对比分析有、无张紧器工况下隔水管连接钻井作业范围如图9所示。由图9中可以看出,无张紧器工况下隔水管连接作业范围为作业范围A (平台偏移范围为36.02 m),有张紧器工况下隔水管连接作业范围为作业范围B (平台偏移范围为61.56 m),耦合模型作业范围相比传统模型扩大了25.54 m。钻井平台-张紧器-隔水管耦合系统模型中考虑张紧器系统对隔水管系统约束作用,可增大隔水管系统连接状态下的作业窗口。

图9 有无张紧器工况下隔水管连接作业范围Fig.9 Connected operation scope of riser with or without tensioner
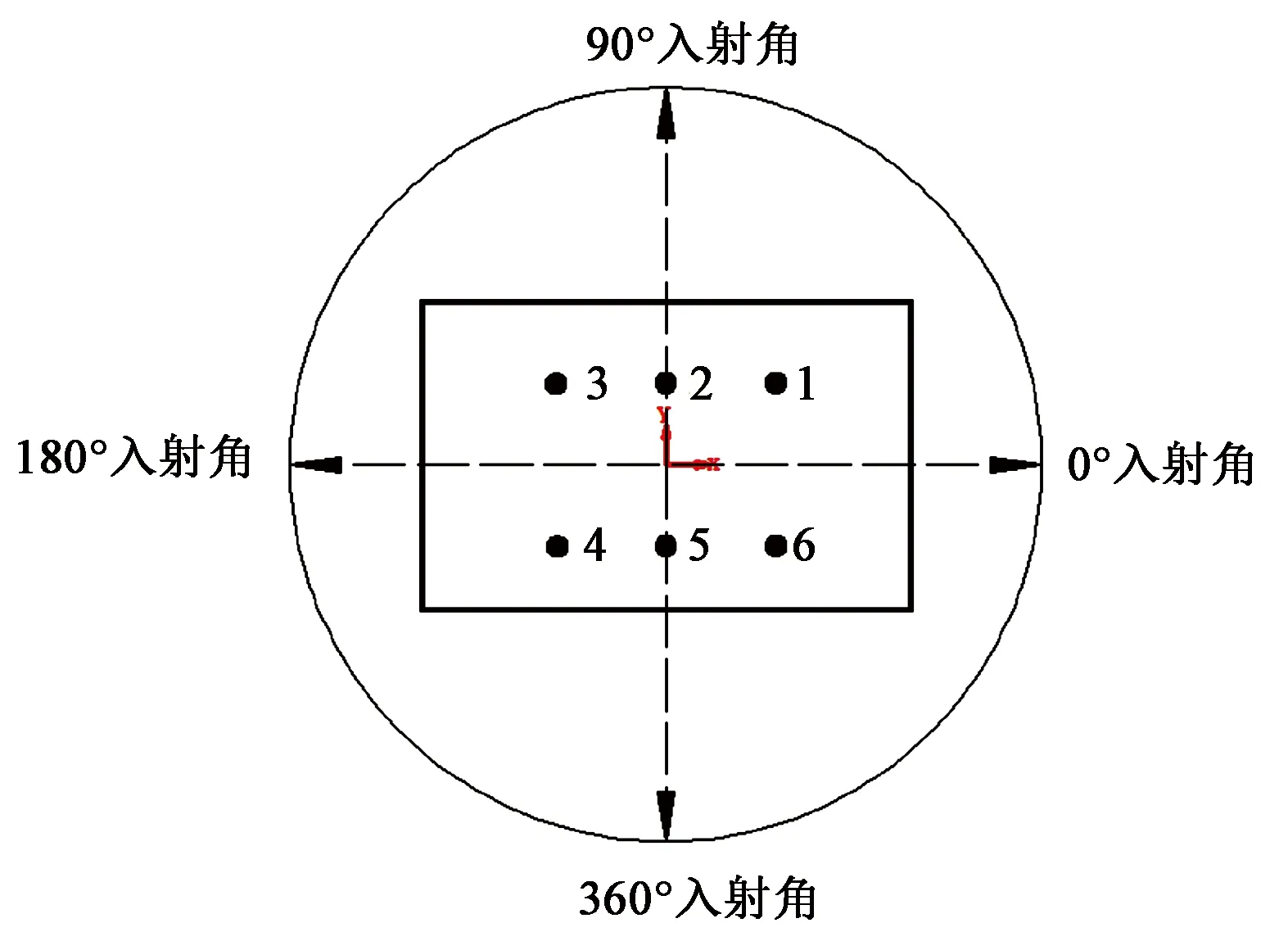
图10 张紧器液压缸顶端位置分布Fig.10 Position distribution of top of tensioner hydraulic cylinder
此外,研究张紧器系统各液压缸与不同波浪和海流入射角之间的关系,计算多种不同波浪和海流入射角度工况下张紧器系统6根液压缸受力情况。图10为张紧器系统液压缸顶端位置在平台分布,图中1~6分别为张紧器系统6个液压缸顶部位置。由计算结果可知,当入射角为0°时,3号和4号液压缸受力最大,因为隔水管沿0°方向偏移,带动张紧器下端沿0°方向运动,此时3号和4号液压缸活塞杆位移伸长量最大;当入射角大于0°小于90°时,4号液压缸受力最大;当入射角等于90°时,4号和6号液压缸受力最大;根据张紧器液压缸顶端位置在平台分布的对称性可知,当入射角大于90°小于180°、大于180°小于270°时、大于270°小于360°时6号、1号和3号液压缸受力最大。图11为隔水管系统沿入射角方向的偏移变化,当波浪、海流入射角度不同时,隔水管沿0°、30°、60°、90°入射角方向最大偏移分别为12.782 、12.781、12.777和12.776 m,最大偏移基本保持不变,因此张紧器系统对隔水管系统各个方向的约束具有较好的均衡性。
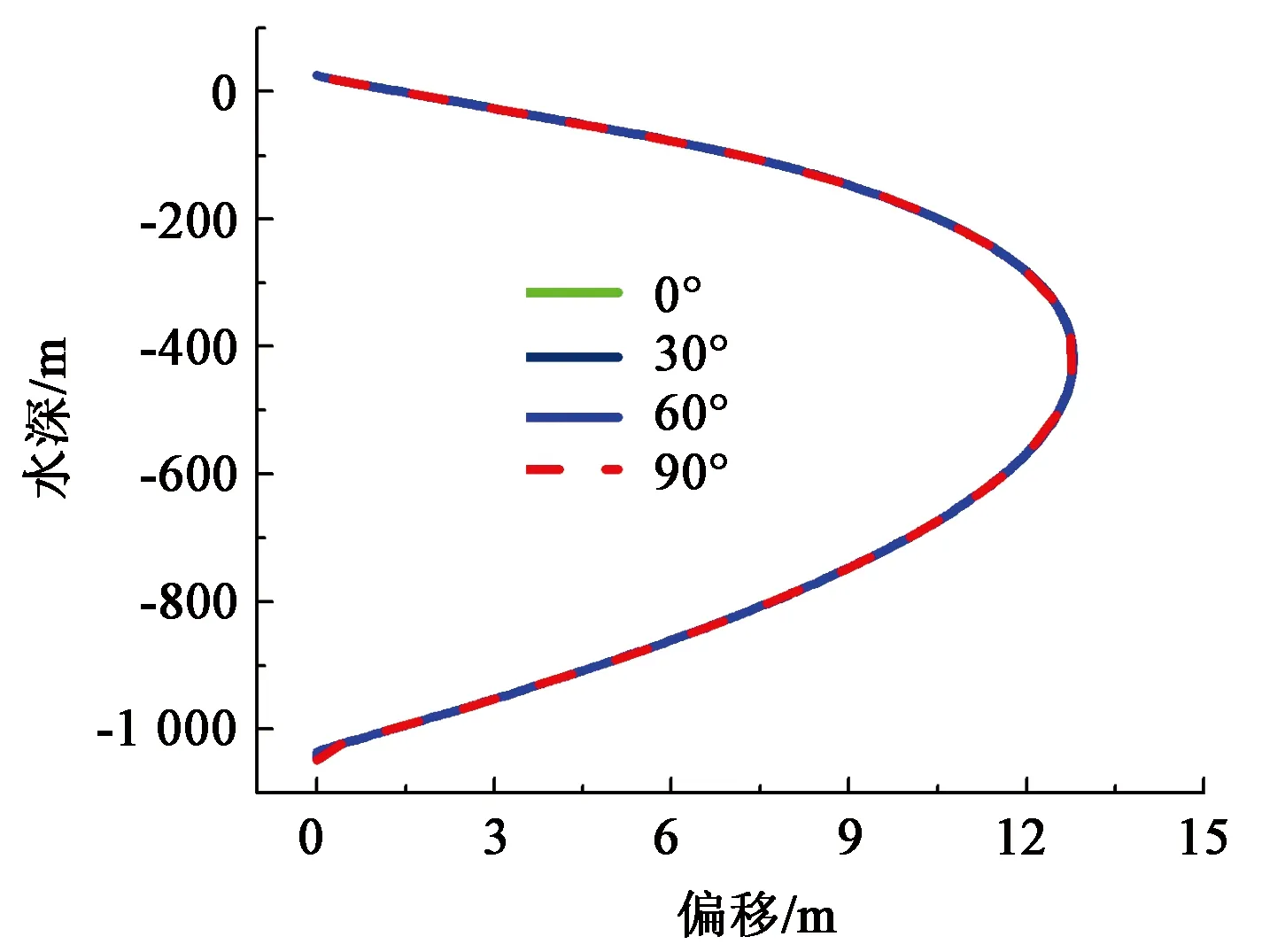
图11 隔水管系统沿入射角方向偏移变化Fig.11 Offset of riser system with different incident angles
3.3 隔水管系统动态分析
为分析张紧器系统对平台运动的传递规律,研究平台分别只在垂荡、横荡、纵荡以及纵摇运动下,平台运动和隔水管系统运动响应特性,分析中取平台垂荡、横荡、纵荡运动均为周期为5 s、振幅为1 m的正弦运动,平台纵摇角度为±3°、周期为5 s的正弦运动。
图12为平台只做垂荡、纵荡和横荡运动下,平台运动和隔水管系统上部垂向运动时程曲线。取90~120 s时间范围内平台运动和隔水管系统上部垂向运动(即张紧器系统顶端和末端垂向运动)时程曲线,隔水管系统上部运动周期和平台运动周期相同;平台在做纵荡和横荡运动时,隔水管系统上部运动幅值基本与平台运动幅值保持一致;平台在做垂荡运动时,隔水管系统上部在垂向做周期为5 s、振幅为0.064 m的正弦运动,隔水管系统上部垂向运动幅值远小于平台垂荡运动幅值。因此张紧器系统在横向和纵向对平台运动传递基本无影响,在垂向对平台运动具有明显的缩小效应。图13为平台只做垂荡运动下隔水管系统偏移位置包络线。由图13中可知,在平台垂荡幅值为-1 和1 m时,隔水管系统最大偏移分别为12.85和12.72 m,隔水管系统偏移位移相差较小;因此张紧器系统在垂向能够较好地缓冲平台垂荡运动对隔水管系统带来的运动冲击,维持钻井隔水管系统稳定,确保平台作业安全顺利开展。

图12 平台和隔水管系统上部垂向运动 时程曲线(垂荡、纵荡、横荡)Fig.12 Vertical motion time-history curve of platform and top of riser system(heave, surge, sway)

图13 隔水管系统偏移位置包络线(垂荡)Fig.13 Offset position envelope of riser system(heave)

图14 隔水管系统偏移位置包络线(纵摇)Fig.14 Offset position envelope of riser system(pitch)
图14为平台只做纵摇运动下(平台纵摇角度为±3°、周期为5 s)隔水管系统偏移位置变化包络线。隔水管在平台纵摇运动的激励下,有、无张紧器系统对隔水管系统偏移位置影响较大;在平台纵摇到±3°,有张紧器系统时隔水管系统偏移值均小于无张紧系统时隔水管系统偏移值,因此张紧器系统能够较好地约束隔水管系统运动偏移;在平台纵摇运动下,有张紧器系统时隔水管系统偏移位置最大的节点(以平台纵摇到-3°时隔水管偏移为参考)运动幅值为1.577 m,无张紧器系统时隔水管系统偏移位置最大的节点(以平台纵摇到-3°时隔水管偏移为参考)运动幅值为1.597 m;因此平台做纵摇运动时有、无张紧器系统对隔水管系统偏移位置影响较大,对隔水管系统的运动幅值影响较小。
4 结 论
(1)耦合模型中引入张紧器系统模型建立的多体耦合动力学模型解决了传统分析方法中忽略张紧器系统耦合作用以及边界条件施加简化等问题,提高隔水管系统的分析精度,更加准确地计算隔水管系统的动态响应。
(2)静态分析中,耦合模型中隔水管系统最大偏移减小6.4%,张紧器系统能够为隔水管系统提供垂向作用力和一定的横向作用力,且横向作用力能够抑制隔水管系统偏移并减小隔水管系统的弯矩。
(3)在动态分析中,平台只做垂荡、横荡或纵荡运动下,隔水管系统上部运动与平台运动具有相同的运动周期,且张紧器系统对平台的垂荡运动具有明显缩小平台运动传递的效应;在平台只做纵摇运动时,平台做纵摇运动时有、无张紧器系统对隔水管系统偏移位置影响较大,对隔水管系统的运动幅值影响较小,且张紧器系统对隔水管具有较好的约束性。
猜你喜欢
小型内燃机与车辆技术(2024年1期)2024-04-05 05:45:40
客车技术与研究(2022年5期)2022-10-29 01:29:40
装备制造技术(2021年4期)2021-08-05 07:39:42
课堂内外(小学版)(2021年3期)2021-01-17 07:31:31
当代陕西(2019年8期)2019-05-09 02:23:00
特别文摘(2018年6期)2018-08-14 09:25:14
小太阳画报(2018年8期)2018-05-14 17:06:37
柴油机设计与制造(2015年4期)2015-11-23 02:06:18
中国卫生(2015年8期)2015-11-12 13:15:16
小朋友·快乐手工(2015年2期)2015-03-13 00:15:01