密集城区高分辨率遥感影像建筑物提取
2019-05-10 08:16:18陈善雄
测绘通报 2019年4期
方 鑫,陈善雄
(武汉大学遥感信息工程学院,湖北 武汉 430079)
高分辨率遥感影像(high-resolution satellite image,HRSI)建筑物提取是摄影测量与遥感领域的一个热门研究主题[1]。长期以来,很多学者就相关问题作了大量研究。文献[2]利用形态特征和植被指数去除图像中的阴影和植被区域;文献[3]提出了一种形态学建筑物指数(morphological building index,MBI),并通过建筑物与阴影间的距离关系来提取建筑物对象;文献[4]利用阴影和植被指数来提取阴影和植被区域,并利用阴影和建筑物的模糊距离建立两者之间的方向关系;文献[5]在OK方法的基础上进一步优化了利用阴影和建筑物间关系的方法。文献[6]使用了一种组合方法,先聚类生成建筑物种子点,再用区域生长的方法提取建筑物的范围,最后通过对非建筑物对象构建一个环来完善提取结果。
在这些较为广泛认同的建筑物提取方法中也存在着一些问题。如,文献[7]利用MBI提取建筑物结果中,由于同质区域内部存在很多噪声,影响了最终的提取结果,且参数过多难以调节;文献[6]的方法虽然自动化程度较高,但单纯通过聚类难以对较亮的非建筑物目标做到有效区分。本文综合前人的研究成果,针对这些方法存在的问题,提出一套具有较高自动化程度的面向对象密集城区建筑物提取流程。
1 建筑物提取的技术框架
本文的整体提取流程分为4个步骤:阴影提取、建筑物对象初提取、疑似对象筛选和后处理,如图1所示。
1.1 阴影提取
阴影在遥感影像上呈现较强的同质性,在可见光波段亮度均较低。针对阴影提取,很多学者提出了一系列算法[3,8-10]。本文对文献[10]的方法作出改进,可以较好地提取阴影对象,详细的提取过程分为3个步骤:RS特征影像计算、图像联合分割和面向对象聚类。

图1 建筑物提取流程
1.1.1 RS特征影像计算
首先将HRSI影像转换到HSI(hue-saturation-intensity)空间后,然后根据式(1)计算出RS比值[10],得到RS特征影像
(1)
式中,S、I分别为HSI空间中分量。
1.1.2 图像联合分割
面向对象的提取方法十分依赖分割的结果[11-12],单纯通过原始影像分割难以取得令人满意的效果。因此将RS特征影像作为一个波段与HRSI影像融合后,对融合影像进行多尺度分割。本文方法基本上与eCognition的分割方法相同,首先根据图像的光谱和形状建立距离目标函数
Dist=wshapeHshape+wspectralHspectral
(2)
式中,wshape、wspectral分别为形状权重、光谱权重;Hshape、Hspectral分别为形状差异与光谱差异。依据距离函数建立起全图的二叉树,最后依据设立的最小差异阈值在二叉树的某一层进行切割,每一棵子树即为一个对象,通过该方法可以将全图划分为若干个对象。
为了突出阴影对象,可以在融合过程中加大RS特征影像的权重,根据经验,若原影像波段数为n,则与RS特征影像融合比例为1∶n。
1.1.3 面向对象聚类
面向对象的聚类算法将矢量对象分为多类,聚类中心数需要根据图像中实际地物类别进行调整。面向对象聚类方式为
(3)
式中,Xi为第i个对象的所有特征,共有n个;Cj为第j个聚类中心;距离函数Distij为第i个对象到第j个聚类中心的欧氏距离;λi为每个对象所属的聚类簇。
在提取阴影过程中每个对象使用了两个特征:HRSI影像三波段均值及RS特征影像均值。虽然聚类的目的是得到影像中的阴影对象,但可以将聚类数目设为大于2以使得提取的阴影对象更纯。在RS特征影像上阴影区域会以高亮显示,与其他地物反差很大且自身一致性程度很高,因此在聚类过程中几乎总是聚为一类,且聚类中心值最大的簇所对应的即为所需的阴影对象。
1.2 建筑物对象初提取
建筑物在遥感影像上的表现十分复杂,同时具有同物异谱和异物同谱性。在众多建筑物提取的研究中,文献[13]提出的形态学建筑物指数(MBI)对建筑物具有较好的区分性。在本文中,采用与上述阴影提取相类似的方法对建筑物进行初提取,区别在于将阴影提取过程中所用的RS影像替换为MBI特征影像。
在具体试验操作过程中,目标距离函数所用特征有两个:HRSI影像的三波段均值及MBI特征影像均值。聚类中心个数需要根据图像中地物复杂程度来确定,一般而言,针对建筑物提取可以将地物聚为4类:高亮区域、较亮区域、较暗区域和暗区域。聚类结果中,将聚类中心最大的簇所对应的对象当作建筑物初提取结果,聚类中心最小的簇所对应的对象当作非建筑物区,中间区域归入疑似建筑物区域。最终得到建筑物对象、疑似建筑物对象和非建筑物对象三类结果。
1.3 疑似对象筛选
该步骤主要分为两个部分:光照方向计算和距离角度筛选。
1.3.1 光照方向计算
首先需要根据1.1节中得到的阴影结果和1.2节中得到的建筑物结果计算出光照方向,光照方向根据建筑物初提取结果和阴影提取结果来计算。在计算过程中借鉴了文献[14]的思想。由多方向线性结构元素和形态学膨胀运算建立投票矩阵,利用式(4)来计算每个建筑物对象所对应的光照方向
(4)
式中,B(xj)为第j个建筑物对象;dilate为膨胀运算;di为第i个方向的线性结构元素;shadow为阴影提取对象;DirectSet为光照方向的集合。式(4)的几何含义是找到使建筑物对象与阴影对象有最多交集的膨胀方向作为该建筑物的光照方向,并增加投票矩阵中所对应方向的权重。通过该方法计算出所有建筑物对象所对应的光照方向,最后选取投票矩阵最大数值所对应的方向当作光照方向。
1.3.2 距离角度筛选
利用光照方向和阴影对象对1.2节中得到的疑似建筑物对象做筛选,筛选的目的是从该部分对象中找出建筑物区域。在筛选过程中需要用到的辅助信息是阴影对象和全图的光照方向。
首先对每一个阴影对象建立一个筛选范围区,范围筛选函数为
(5)
式中,f1为沿光照方向的筛选函数;f2为垂直于光照方向的筛选函数;α为光照方向;(xe,ye)为边界点。通过筛选函数获取边界点为
(6)
式中,Pshadow为阴影点的集合。搜索每一个阴影对象点,找到阴影对象中沿着光照方向的边界点集合Palong_edge和垂直于光照方向上的边界点集合Pvertical_edge,根据边界点集合和光照方向即可计算出阴影对象自身的边界范围。设立两个阈值Twidth和Tdistance,分别用来拓展垂直于光照方向和沿光照方向的搜索范围。
建立起搜索范围区后,对疑似建筑物对象做筛选,将其分为建筑物对象和非建筑物对象。
1.4 后处理
一方面,由于在高分辨率影像中可以获得十分丰富的细节信息,往往会从图像上提取出多余的信息;另一方面,在图像分割步骤中往往会采取过分割的方法,这会导致提取出的建筑物对象出现缺损或包含多余信息。
根据得到的建筑物初提取结果与从疑似建筑物对象中筛选出的建筑物样本合并后,会发现提取结果中间出现“漏洞”或边缘与实际地物难以贴合的现象。针对这种情况,本文利用GrabCut算法[15]对最终提取的结果进行优化。GrabCut是一种图像分割算法,该算法利用图像中的纹理信息和边界信息,根据用户选择的前景和背景建立高斯混合模型,在搜索过程中反复迭代找到能量最小的目标区域作为最终的目标检测结果。
在处理过程中,首先需要计算出每一个建筑物对象所对应的前景和背景,计算方法为
(7)
式中,Bi为第i个建筑物对象;Dilate为膨胀运算;Rect为求取对象的矩形范围;Expand为对矩形的范围做拓展;τ为一个比例因子。对每一个建筑物目标Bi作膨胀运算,将计算膨胀后的矩形范围rectprospect当作算法的搜索目标区域,再将根据搜索区域的长宽按一定比例τ扩大矩形框的范围当作背景rectbackground。获取每一个建筑物对象的前景和背景所对应的范围后,用GrabCut算法计算出该建筑物对象的提取结果。
在实际的后处理过程中,有时由于建筑物目标太小,导致选取的背景图太小,通过高斯混合模型无法对前景的目标进行正确提取,在本文中对这种建筑物目标不作处理,仍然以原提取结果作为最终结果,因此在最终的提取结果中有部分建筑物对象的边缘仍然不够完善。
2 试验与分析
2.1 试验结果对比
黄昕等提出了形态学建筑物指数MBI并利用该指数取得了较好的面向对象的建筑物提取效果[3],文献[6]主要通过基于聚类的方法得到了较好的基于像素的建筑物提取结果,为证明本文方法的有效性,选用武汉地区的两幅QuickBird影像分别用文献[3]、文献[6]和本文方法对数据进行建筑物提取试验,结果如图2所示。
试验精度通过3个经典指标查准率、查全率及F1分数来衡量[16]。在本试验中,对3种方法提取结果的精度评定见表1。
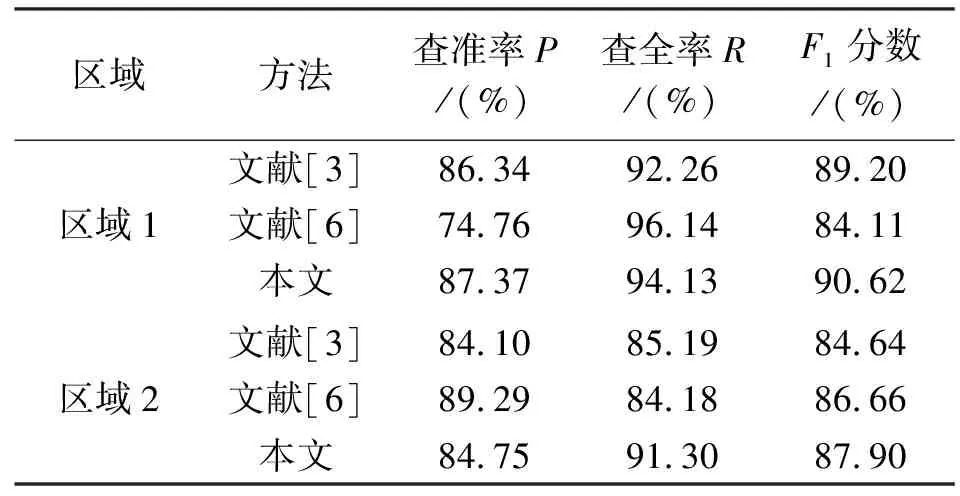
表1 试验区精度评定结果

图2 3种提取方法结果对比
2.2 试验结果分析
根据试验结果可以看出,在密集城区的建筑物目标提取中,3种方法都可以得到较好的结果。从图3所示的区域中可以看出,通过本文的后处理可以更好地完善建筑物轮廓。

图3 局部示例1
在如图4所示的区域中,存在较亮的非建筑物目标,通过文献[3]和文献[6]的方法均不能做到有效去除,而通过本文的阴影距离筛选条件可以将这类目标加以滤除。

图4 局部示例2
对于图5所示较暗且在其光照方向上没有阴影对象的建筑物,通过本文与文献[3]的方法均难以取得较好的效果,但是文献[6]的方法对这样的目标有一定的提取效果。

图5 局部示例3
3 结 语
本文在综合前人的建筑物提取方法的基础上,提出了一种针对密集城区的自动化程度较高的面向对象建筑物提取流程。本文的提取方法对输入数据的要求低,仅需三波段影像即可完成,同时人工参与程度也较低,需要调整的参数少并且易调节。
在试验过程中,用本文方法与部分前人的方法进行了比较。结果证明,本文的建筑物提取流程具有较高的效率和可靠性,在建筑密集区域取得了不错的效果。在今后的研究中,一方面仍要解决建筑物同物异谱的问题,另一方面可以考虑将深度学习引入建筑物提取的方法中。
猜你喜欢
中国机械工程(2022年8期)2022-05-09 12:32:02
铁道建筑技术(2021年4期)2021-07-21 05:33:36
中国机械工程(2021年8期)2021-05-07 05:49:10
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
音乐教育与创作(2019年8期)2019-05-16 04:06:34
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
小天使·二年级语数英综合(2015年12期)2015-12-04 16:36:12