
基于Leica三维激光扫描仪的建筑物日照分析测量
2019-05-07 02:49李强
城市勘测 2019年2期
李强
(沈阳市勘察测绘研究院,辽宁 沈阳 110004)
1 引 言
日照权又称“自然采光权”,指建筑物使用人享有获取日光照射的权利。建筑物日照权已在2007年我国颁布实施的《物权法》中进行了明确具体的规定,因此新建的建筑物,对附近已有建筑物的阳光遮挡,必须满足国家住宅日照标准要求[1]。对日照分析所涉及的已建建筑物进行实地测量从而为日照分析工作提供可靠资料已成为城市测绘单位一项重要的工作内容[2]。
三维激光扫描技术是一项通过非接触式高速激光扫描测量,以阵列式点云的形式获取物体表面三维空间数据的新技术[3],将传统的点测量发展为面测量,可以高效率、高质量、低成本地获取海量的空间数据,充分体现测量目标的特征信息。三维激光扫描仪以点云形式获取建筑物表面的阵列式几何图像数据,可以快速、大量地采集建筑物立面信息,为日照分析测量提供了一种全新的技术手段[4]。
2 日照分析测量的内容和要求
日照分析的原理就是根据建筑所在地的太阳方位角、高度角等信息,通过投影原理计算拟建建筑物和已有建筑物之间的遮挡关系。日照分析测量就是对日照分析所涉及的已有建筑进行实地测量,为日照分析提供可靠的测绘资料。
国家标准《城市居住区规划设计规范》对建筑物有效日照时间进行了明确的规定[1],应满足大寒日日照时数应不小于 2 h。根据沈阳市的有关规定,需要对拟建建筑高度1.5倍扇形范围的已有建筑进行日照遮挡分析,并对被遮挡建筑进行相应的补偿。
根据日照分析的数据需求,对已建建筑的测量应包含的要素及测量要求如下:
(1)建筑物的平面图,确定建筑物间相互位置关系的依据。主要测绘遮挡、被遮挡建筑主体、房顶及其附属结构的平面图。房顶测量主要针对遮挡建筑物,对影响日照效果的房顶结构应精确测量;附属结构测绘主要针对阳台、檐廊,被遮挡建筑物重点测量进光的部分,露天阳台和封闭阳台要区别绘制。
(2)建筑物的高度,分析确定建筑物间是否存在遮挡的重要因素。遮挡建筑物可能产生阴影的建筑物组成部分如女儿墙、檐口、坡屋顶应重点测量其高程数据。
(3)建筑物的立面图,是日照计算的重要对象,也是后续确定挡光补偿的重要依据。遮挡建筑物不需要测绘立面图,只标明相对正负零点的高度,被遮挡建筑物才需要测绘立面图,主要是测绘被遮挡建筑物的门窗,并精确测定其大小及高度。阳台、门窗大小的测量以开口大小为准,由于建筑物建造误差、仪器观测误差造成的相关门窗大小、高度不一致等情况,可适当进行调整,取多个相同规格门窗大小高度的平均数作为最终结果。
(4)建筑物所在位置高程,科学的日照分析还需要考虑建筑物所处位置的地形因素。一般选择建筑物第一层消防通道处的地板高,要找准位置进行测量,测量时要注意不同立面所对应的地面间存在高差的情况。
3 日照分析测量流程
以沈阳市某拟建小区为例,介绍利用三维激光扫描仪对已建建筑进行日照分析测量的过程和方法。该拟建小区主要为33层高层住宅和临街2层商铺,拟建小区的建筑设计图已提供,因此仅需对被遮挡建筑物的平立面图进行测绘。其总体流程图如图1所示。
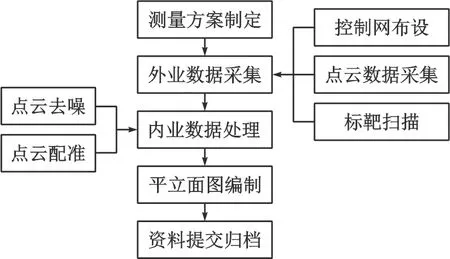
图1 三维激光扫描仪日照分析测量流程
3.1 测量方案制定
(1)仪器选择
本次日照分析测量选用的三维激光扫描仪是Leica Scan Station P40,是徕卡最新一代的三维激光扫描仪,集成了具有HDR技术的高分辨率相机,方便点云处理和纹理贴图;精密双轴补偿技术,精度高达1.5″,可实时补偿仪器轻微震动带来的精度偏差,无须担心扫描仪高速转动对点云精度的影响,为获得高质量的数据提供保障。其性能指标如表1所示。
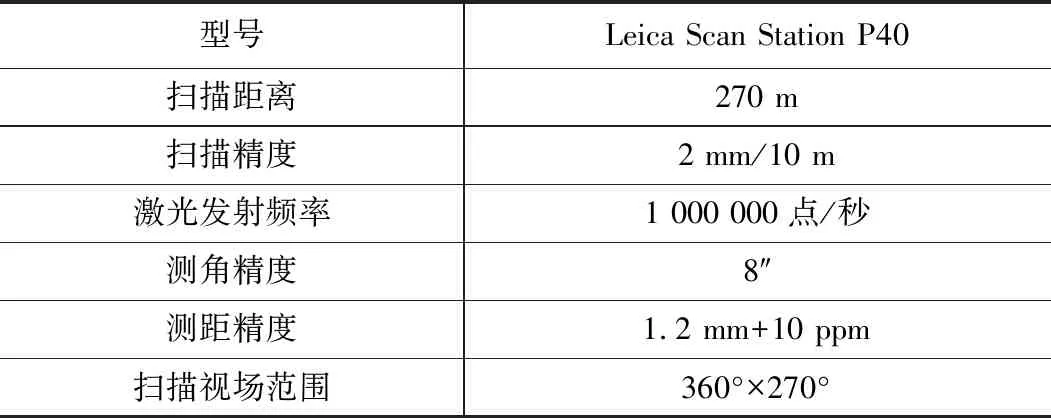
Leica Scan Station P40性能指标 表1
(2)测站布设
测站布设应考虑扫描数据的完整性,测站点应选择在视野开阔处,需要多测站扫描时应保证测站间的通视,测站与测站之间不小于20%的重叠度,尽量以较少的测站覆盖整个测区。测站布设在较高且正对建筑物的位置扫描,以获取较多的目标点,提升数据精度。为方便后期点云配准,各测站重叠区域应布设不少于3个的公共标靶,并尽量避免位于同一条直线上。
3.2 外业数据采集
根据制定好的扫描方案架设三维激光扫描仪,根据测站测量范围设定该站的扫描起止角度,扫描分辨率设定为 3 mm/10 m,完成点云数据采集。Leica Scan Station P40集成了高分辨率相机,可在扫描同时获取目标的影像信息,方便点云数据的后期应用。为保证点云配准精度,在场景扫描完成后,对公共标靶以及测量控制点进行扫描,以便后期点云自动配准。对于树木、车辆遮挡较严重的部分,还需要结合手持激光测距仪对门窗进行补充测量。
为了将点云数据统一到沈阳市平面和高程系统,需要在测区中布设不少于3个控制点。控制点测量采用的是网络RTK测量的方式,利用了“沈阳市连续运行卫星定位城市测量综合服务系统(SYCORS)”和沈阳市似大地水准面,RTK定位精度可以达到 2 cm。
3.3 内业数据处理
内业数据处理采用的是Leica公司的点云后处理软件Cyclone,主要包括两部分内容,分别是点云数据预处理和点云数据配准。
(1)点云数据预处理
点云数据预处理又可分为冗余数据清理和色彩信息融合。冗余数据清理主要是采用人工交互的方式,在点云后处理软件中清理目标前方的遮挡物、扫描有效范围外的点云等。由于Leica P40扫描仪扫描中心和集成相机的摄影中心相对位置固定,色彩信息融合可以利用Cyclone自动处理,将影像的色彩信息赋值给点云数据,获得彩色点云数据,如图2所示。
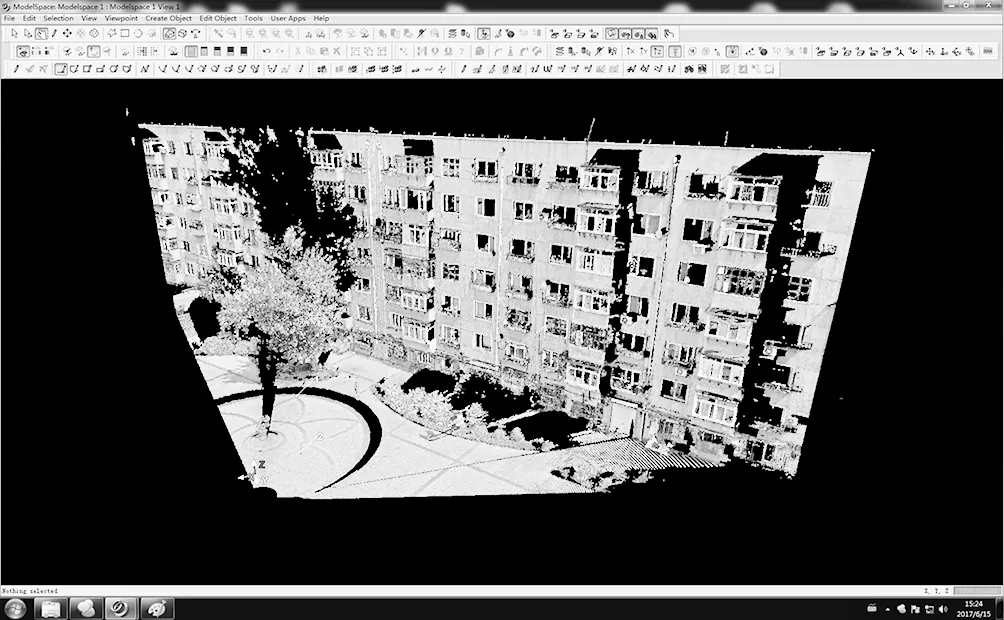
图2 预处理后的三维点云数据
(2)点云数据配准
点云数据配准是利用标靶以及布设的控制点将各个测站的点云数据合并为一个完整统一坐标系下的点云过程。其原理是以标靶作为同名点,完成测站点云数据拼接,再利用控制点将点云数据纳入沈阳市的平面系统和高程系统中。Cyclone中标靶自动配准中误差可以达到 2 mm,控制点配准中误差主要取决于RTK的定位精度,中误差小于 2 cm。经过配准后的彩色点云数据如图3所示。

图3 配准后的三维点云数据
3.4 平立面图绘制
利用Leica Cyclone附带的AutoCAD插件Cloudworx可以将处理好的点云数据导入AutoCAD中,利用CAD强大的矢量编辑功能进行平立面图的绘制。常用的绘制方法主要有三种:特征点法、切片法和投影法。
特征点法是在三维点云模型中立体采集若干特征点,该方法主要应用于建筑物所在地面高程点的提取,也可通过拟合手段,将特征点拟合成线,用来绘制弧形阳台等曲线目标物。
切片法是通过定义切平面提取某一高度区间的点云,根据一定的取舍原则将这些连串密集碎部点连接起来,得到建筑物的轮廓线,该方法适用于平面图的绘制。
投影法,通过定义不同的投影面,将三维点云模型投影到二维平面,在平面中提取并绘制特征线,该方法主要用于建筑物立面图的绘制。
实际项目中需要综合运用上述三种绘制方法,如图4所示为日照分析测量中的一个立面图的成果。

图4 根据点云数据绘制的立面图
4 效率和精度分析
传统的三维数据采集方式主要有:单点采集法,例如GPS-RTK、全站仪;基于光学摄影测量的近景摄影测量、航空摄影测量等[6]。三维激光扫描技术作为一种新兴的数据采集手段,相比传统的数据采集方式,在测量效率和精度上都有了较大提升。
目前日照分析测量最常用的方式还是全站仪测量,在此项目中将三维激光扫描仪和全站仪相比,作业效率提升了约5倍,如表2所示。
三维激光扫描仪和全站仪的单点定位精度都可以达到毫米级,在测量两点间距离方面,三维激光扫描仪受限于扫描分辨率,测量精度比全站仪略低。选取若干门、窗、墙面,将三维激光扫描仪的测量结果同全站仪进行对比,结果如表3所示。其最大较差小于 2 cm,平均较差小于 1 cm,能够满足日照分析测量中测量精度不低于 5 cm的需求。
5 结 语
相比传统的日照分析测量采用的全站仪、水准仪,三维激光扫描仪有着高效、快速、自动化、信息丰富、非接触等特点。本文将三维激光扫描仪引入到日照分析测量中,改变了传统的作业模式,减少了测绘工作量,在作业效率上有了较大的提升,取得了较好的成效。在点云数据处理和平立面图绘制过程中如何减少人工干预,提高数据自动化提取程度则是今后需要研究优化的方向。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
现代仪器与医疗(2022年2期)2022-08-11
测绘地理信息(2022年2期)2022-04-02
金桥(2021年9期)2021-11-02
金桥(2021年9期)2021-11-02
金桥(2021年9期)2021-11-02
陕西水利(2021年5期)2021-06-21
模具制造(2019年3期)2019-06-06
星星·散文诗(2017年2期)2017-07-05
现代营销·经营版(2015年3期)2015-04-20
