基于分段拟合算法的民用航空机载防撞预警系统设计
2019-05-07 03:27:40张远洋张跃进
西安工程大学学报 2019年2期
张远洋,张跃进
(1.成都信息工程大学 电子信息工程学院,四川 成都 610225;2.华东交通大学 信息工程学院,江西 南昌 330013)
0 引 言
在国际贸易和旅游产业的推动下,全球民用航空业发展迅速,航空出行已经成为商务人士和部分旅游爱好者出行的首选方式。由于市场需求大,我国民用航空的发展速度远高于世界平均水平,航空产业所创造的产值仅次于美国,位列世界第二。由于航空客流量的持续增加,航线与航班的密集程度越来越高,这给民用航班的调度工作带来巨大的挑战。民用航空器的安全飞行与近距离防撞问题成为空管部门需要重点关注的问题之一[1-2]。
为保证航线密集情况下航班的安全飞行,国际航联组织建立了一套多国共享的国际航空交通运行管理系统,依靠空间通信卫星、雷达和地面接收站指挥中心形成了一个立体化的空间通信网络,用于指挥和控制航班的班次与空间距离[3-4]。由地面指挥中心控制的机载防撞系统能够从总体上控制飞机之间的安全飞行距离,并通过雷达信号与每一台民航飞机取得联系,从整体上保证民用航空器的安全飞行。从目前全球两百多家航空公司的飞行大数据统计结果来看,空间防撞系统的投入使用使全球范围内民航飞行的事故率和故障率分别降低了85.36%和41.20%[5]。除了配备地面的安全控制系统之外,还应该在每一台民用航空器上安装机载防撞安全系统,以保证在雨雪等恶劣环境干扰下民用航空器飞行的安全[6]。
通常既定的民航航线具有一定的空间经度和维度浮动范围,民用航空器短距离空间飞行轨迹的控制也与飞行的安全紧密相关。因此,设计有效的民用航空机载防撞预警系统的重要性不言而喻。目前在民用航空机载防撞预警方面已有一些专家学者给出了较好的研究。崔丽群等[7]提出一种基于鱼群算法的防撞预警系统设计,利用鱼群算法在飞机周围的水平和垂直方向上分别确定相应的避撞区域和保护区域,并确定预警的时间和空间门限,实现了告警和避撞的功能,该系统能够控制多架飞行器的空间冲突,但存在运算量大和代价过高的问题;韩艳茹等[8]提出一种基于改进PSO算法的空中交通预警与防撞系统,对相同高度的交叉冲突场景飞行器进行研究,确定两架飞机间的距离与安全间隔的关系,采用改进PSO算法建立冲突解脱策略的调配模型,规避飞行冲突,但基于PSO优化技术的防撞预警系统的延误路径过长,不能够有效控制飞行器的碰撞风险,实时性差;卢允娥等[9]提出一种基于 ADS-B技术的机载综合防撞系统,提出调速与调向的相对运动解脱算法,但是该算法仅适用于交叉冲突的一种情况,不适用于多种冲突场景。
针对现有方法中存在的最优飞行路径选择能力差、代价高、实时性差的问题,本文设计一种基于分段拟合算法的民用航空器机载防撞系统设计,利用分段拟合算法在局部控制和最优躲避路径选择上的优势,提高飞行器碰撞规避的成功率。利用MCU主控芯片、超声波雷达模块、碰撞报警模块等硬件结构构建防撞预警系统,并对民用航空器飞行过程中的轨迹变化做出预测和分析;设计机载防撞系统工作流程,利用分段拟合算法求解出每一段飞行距离的控制函数,并将其汇总拟合为趋近于最优航线的最小平方函数,实现民航飞行的安全控制。
1 防撞系统硬件结构
机载防撞系统硬件部分的设计需考虑到多种复杂的高空应用场景,并选择和应用识别率更高的超声波雷达来测试民航飞机的飞行速度与设备之间的准确距离[10-11]。超声波雷达模块在硬件系统的成本控制、可靠性和稳定性方面显著优于传统的毫米级雷达测距系统,有助于提高距离传感器的距离测试精度和灵敏度[12]。此外,本文设计的民用航空机载防撞系统的超声波雷达模块还在距离测试算法上进行了优化和更新,采用了分段拟合技术降低防撞预警系统的算法代价,缩短延误距离,并提高障碍物识别的准确率。民用航空机载防撞系统的主要硬件构成如图1所示。
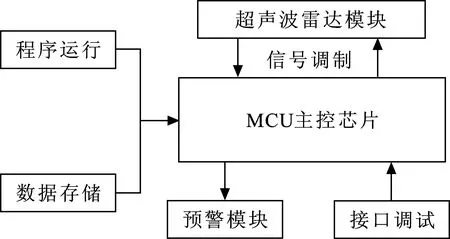
图 1民用航空机载防撞预警系统 硬件结构图Fig.1 Hardware structure of civil aviation airborne anti-collision warning system
超声波雷达模块采用仿生学的原理,持续不断地向前端和左右两端发出和接收信号,该模块还内置了信号调制电路与信号放大电路,实现对信号功能的放大和滤波。超声波雷达采集到的距离、角度相对位移等信息都传输到防撞预警系统MCU主控芯片。为满足防控系统在性能上的总体要求,选择功能更为强大、功耗更低的STM32F258I80型芯片。STM32F258I80型MCU主动芯片是航空机载防撞预警系统的核心模块,芯片的最高信号采样率能够达到2.8 MHz,无需外接任何设备。芯片的引脚数量为136个,最高控制主频能够达到160 MHz,自带NPU单元和DSP指令控制集合,能够满足中、低、高等多种频段的要求。MCU主控芯片通过ADC装置与信号调制电路及超声波雷达模块连接,实时地处理外部传递进系统的信号。如果发现在有效可控的半径范围内存在障碍物,超声波报警模块就会提升机组人员做好应急预案。系统程序运行模块负责MUC主控芯片及其他模块的程序调动和修正,数据存储模块主要负责对采集到的全部空间数据进行存储,以便后续工作中随时调用[13-15]。
本文设计的超声波雷达模块使用小型多波段雷达传感器,模块中内置的超声波震荡装置能够调制和过滤多种信号波形,并将回拨信号调制成MCU主控芯片能够识别的连续波形。首先作为被调节的回波信号与本振信号混合后,信号的相位值偏差被控制在90°以内,信号输出的阻抗值低于40 Ω。其次在信号发出时原始信号被一分为二,这样发出的超声波频率会更加稳定,信号碰到障碍物后95%以上载有空间位置信息和角度信息的有效回波信号,能够被超声波雷达模块接收并传递到系统的主控芯片。模块配备了多种功能丰富的引脚类型,因此能够在高噪声环境下也能够保持信号发射与接收的稳定性[16]。
由于超声波雷达模块输出的波形为未被调制的正弦波,很容易被湮没在高空的噪声之内,因此在模块的前端安装了滤波装置,需要将标准的正弦波调制成为三角波型,以增强对回波信号的识别功能,信号的放大装置也只有在滤波之后才能发挥出信号增益的作用,否则系统噪声和环境噪声也会被无限的放大[17]。信号从射频前端发出后压控振荡器在调制波形的同时也能够实现信号的增益滤波,在滤波器的选择方面采用了更为有效的有源滤波器,不仅能够节省系统的能耗而且负载的负面效应也不明显,实现对三角波信号的高阶滤波。此外有源滤波器与传统的无源滤波器相比重量更轻、体积更小、成本可控,更有助于提高对民用航空器载预警防撞系统的综合管理和控制[18]。
此外,本文设计的民用航空机载防撞系统的超声波雷达模块还采用了滤波降噪的方法,将更强的三角波型作为系统调制信号输入端,因此信号的频率值控制方面始终超过最低的120 Hz,这样可以保证防撞系统回波信号识别的稳定性。超声波雷达模块在载有有效回波信号的处理中由于采用了分段拟合的算法,故在信号的增益控制上更容易,并促使整个信号的识别与分析系统形成一种自动反馈的机制,确保回波信号在输入、输出端的稳定性都能够加强,这样也可以确保有用的空间距离、角度信号不被湮没在环境噪声当中。由于STM32F258I80型芯片内部的数据存储空间有限,采用了FMC的方式外接拓展系统的内存,在存储器规格的选择上采用了SDR系列的扩展内存,可以提供更宽的码间地址拓展芯片的数据容量。程序运行模块中存储着系统的主控程序、MCU主控单元中的全部运行程序及其他模块的应用程序,供系统随时地调用。一旦通过对超声回波的分析识别到前方危险区域有障碍物时,预警模块就会发出报警,提醒机载人员采用主动防控措施,有效规避潜在风险的存在。
2 防撞系统软件
民用航空机载防撞系统的软件主控程序采用了ARM公司的通用软件设计,界面友好、操作简单,同时还具有良好的系统兼容性。超声波雷达模块通过对回波信息的分析,以判断飞机是否处于安全的飞行区域之内,如果检测出在飞行角度和飞行距离方面存在安全隐患,报警模块就会发出警告以提示飞机驾驶员和机组人员采取应急措施。防撞预警模块主控程序应具备以下的基本功能,超声波雷达模块实时获取前方或侧方的障碍物信息,MCU芯片识别回波信号有效载入信息判断飞机当前的飞行状态是否安全;其次主控程序能够准确地判断出飞机当前的速度信息、方向信息和经纬度信息,如果在安全的距离和角度之内系统不会发出警报,如果超出安全区域机组人员还未采取应急措施,主控程序会自行紧急制动以避免发生碰撞[20];最后防撞系统主控程序设有紧急制动的安全阈值,阈值的浮动范围可以根据飞机的性能自行设定,超过设定阈值系统程序就会进行紧急制动或适度调整飞机的方向,机载防撞系统的主动程序,如图2所示。
航空防撞系统根据超声波回波信号可以规划出若干条可供选择的行进路线,系统可以根据对飞行距离和角度的判断,并采用分段拟合的方式将这些路线转化为函数表达式。曲线分段拟合的算法实质上是一种函数逼近方法,设飞机飞行的轨迹为y=f(x),受到飞行误差精度的控制和约束,无法保证每一个最优的空间数据点(xi,yi)都能够准确通过飞行轨迹,只能够通过分段拟合的方式逼近理想的飞行轨迹,采样点的误差μi可以表示为
μi=f(xi)-f(yi)
(1)
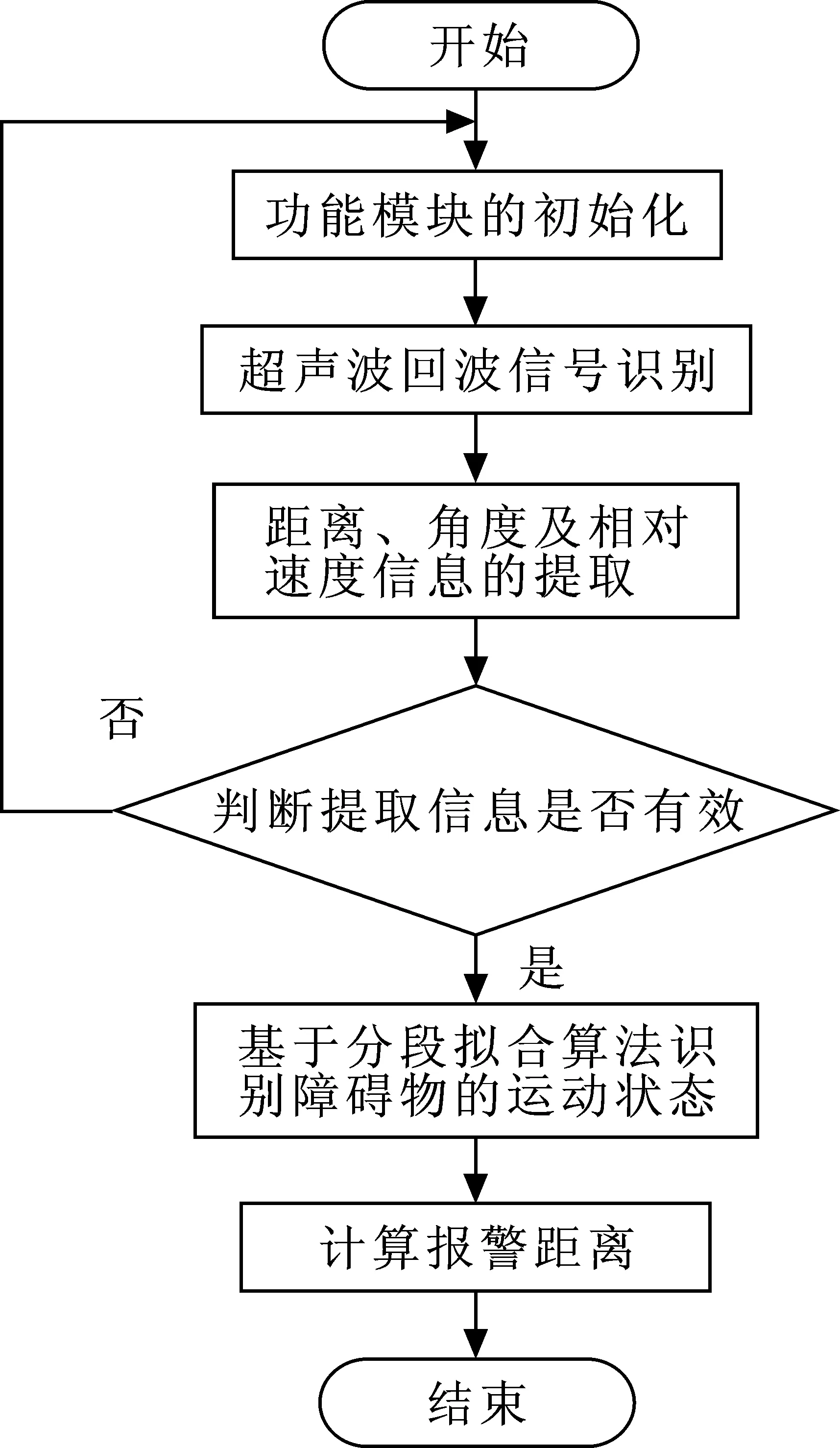
图 2防撞系统主控程序流程图Fig.2 Flow chart of the main control program of the collision avoidance system
曲线分段拟合需要解决2个最基本的问题,首先,要选择适合的线性函数、对数函数、幂函数或指数函数,为了减少计算的复杂性通常选用线性函数,在对线性函数进行分段拟合求导,逼近理想的飞机飞行曲线;其次,样本点的数量要足够多,这样对线性函数求导后才能够更加接近曲线函数,还需要保证样本点到拟合后曲线的纵向距离及横向距离的平方和最小,这样可以最大限度地降低飞机与障碍物发生碰撞的风险。在具体的分段拟合中,本文采用最小平方法来平衡实际观测值与飞行轨迹预估值之间的偏差,并利用系统的主控程序纠正预估轨迹与理想轨迹之间的偏差。在一个连续的分段拟合曲线中,设g0(x),g1(x),…,gn(x)为n+1个拟合线段,在每一段函数中都在实时地纠正飞行的角度和方向,那么民航飞机的整个飞行轨迹ψ,即为这些拟合线段的和,具体表示为
(2)
式中:τk为每一段变量的控制系数;gk(x)为第k分割拟合线段。如果设分段拟合函数h(x)∈ψ,经过分段拟合后的飞行轨迹也可以改写为
(3)
这时由飞行轨迹组合而成的数据点(xi,yi)动态集合,就可以近似地被认为是分段拟合函数h(x),通过对飞行距离和角度的不断调整,就能够有效地规避前方和侧方的飞行障碍物。基于分段拟合算法的航空机载预警系统设计,在超声回波识别的准确性及飞行角度调整上具有一定的优势,可以确保民航飞机在安全的区域内飞行。
3 仿真实验及结果
3.1仿真场景确定
为检验本文所提方法在最优航线选择与控制方面的性能,设计对比实验进行验证。将本文所提方法与基于PSO算法的防撞系统相对比,检验本文所提方法的最优路线选择能力;将本文所提方法与基于PSO算法的防撞系统、基于鱼群算法的防撞系统相对比,检验本文所提方法的控制性能。
设计在Matlab7.0仿真环境下进行飞机的模拟防撞预警仿真实验,实验中需要做以下的假设条件:
(1) 民用航空机的飞行运动为匀速直线运动,在航行中保持飞行速度稳定不变。
(2) 假定民用航空机在固定不变的空间高度飞行,飞机躲避障碍物时飞机与障碍物处于同一水平面,这样可以将三维空间问题转换为二维平面问题。
3.2实验结果与分析
在200 km×200 km的仿真区域内进行避撞仿真实验分析,在目标飞机所在的区域内,还同时存在2台障碍物飞机。如图3所示,为本文所提方法的最优路线选择结果。
从图3可知,实验过程中,目标飞机和2架障碍物飞机的测试起点分别为[0,0]、[0,56]和[0,56],3架飞机处于同向飞行的状态,由于本文所提的基于分段拟合算法的机载防撞预警系统可以实时地选择最优航线,因此有效避免了与2架障碍物飞机碰撞的风险。
在同等条件下,传统的基于PSO算法的防撞系统的仿真结果如图4所示。
图 3基于分段拟合算法的防撞系统 最优航线选择图
Fig.3 Optimal route selection diagram of anti-collision system based on piecewise fitting algorithm
图 4基于PSO算法的防撞系统最优 航线选择图Fig.4 Optimal route selection diagram of anti- collision system based on PSO algorithm
从图4可知,在传统基于PSO算法的防撞控制系统下,由于在雷达目标的识别和最优航线的选择方面存在不足,导致目标飞机与障碍物飞机发生了3次碰撞(碰撞点分别为[83,112],[119,156]和[160,166]),最优航线选择能力不如本文所提方法。
在设计民用航空防撞系统的过程中,还要考虑到飞机飞行的延误总路径。因为延误总路径过长不仅会增加飞行的总代价和总成本,还会导致飞行器脱离主航线而造成其他的不可预测的危险。分别利用基于分段拟合算法的防撞系统、基于PSO算法的防撞系统和基于鱼群算法的防撞系统进行了20组仿真实验(在仿真区域内每隔10 km进行一次测算),测算目标飞行器的延误总路径,具体统计分析的结果如表1所示。
分析20次仿真模拟的结果可知,在相同环境下,本文所提的基于分段拟合的民用航空机载防撞系统的防撞系统设计路径偏差在3种方法中最低,证明本文所提方法的飞行控制能力最强,性能也最为稳定可靠。
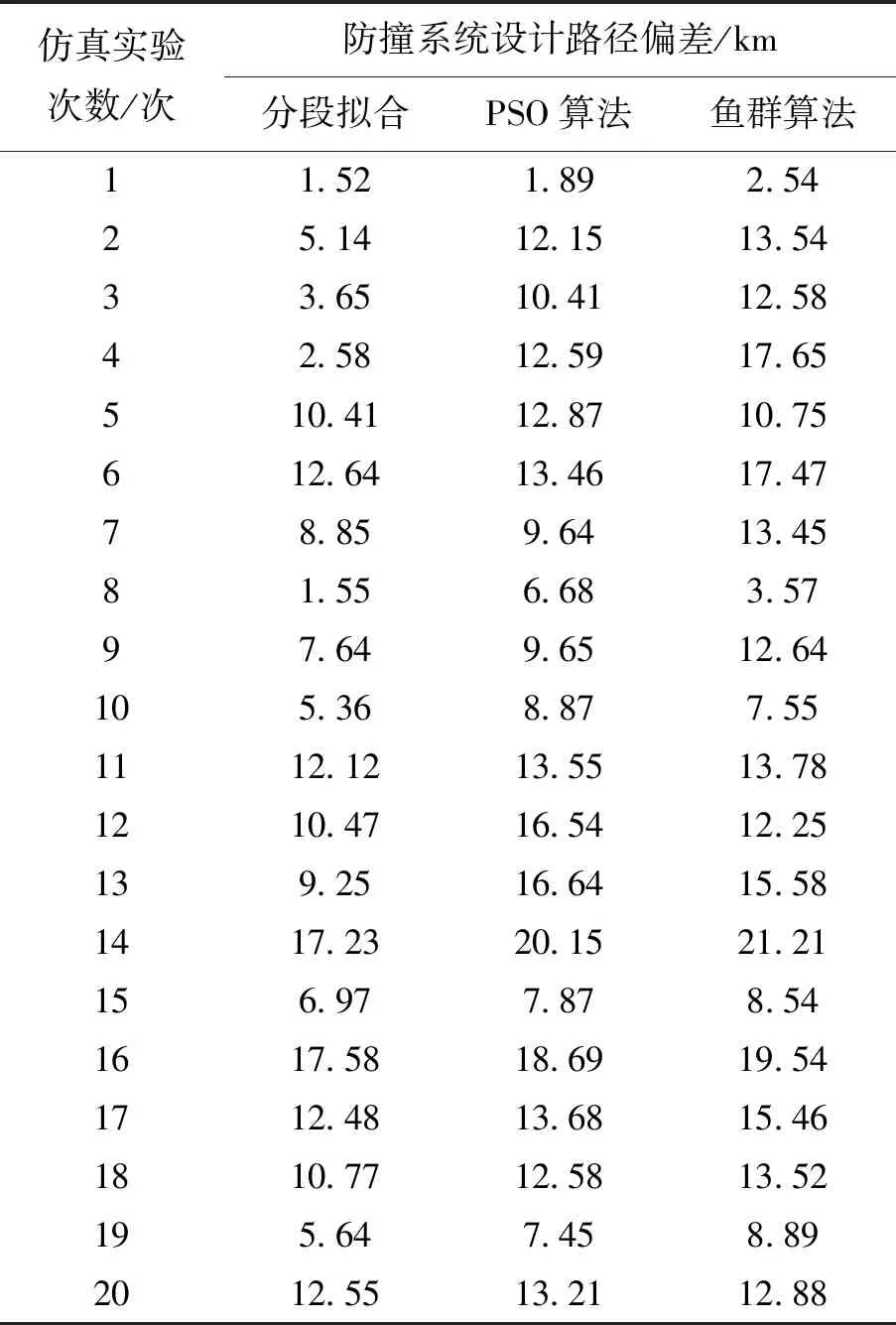
表 13种防撞系统的航线纠偏总路径延误对比Table 1 Comparison of the total path delay of the three lane collision avoidance systems
4 结 论
(1) 随着全球经贸的发展和一体化程度的提高,当前空域中民用飞行器的数量在快速地增长,航线密集程度的增加也提高飞行器碰撞的几率,现有空中交管系统面临着严重的挑战,在飞行器合理的避撞中还要兼顾到延误代价和飞行成本等问题,为此本文设计了一种基于分段拟合算法的民用航空机载防撞预警系统。
(2) 本文所提方法对民用航空器飞行过程中的轨迹变化做出预测和分析,利用分段拟合算法求解出每一段飞行距离的控制函数,并将其汇总拟合为趋近于最优航线的最小平方函数,以保证航线的安全性和经济性。实验结果证明,本文所提方法改善了原有飞行避撞系统在最优飞行路径选择方面精度差、代价高的问题,整体更具优势性。
(3) 民用航空机载防撞系统研究是一项具有实用意义和基础的课题,在未来阶段,应在本文研究的基础上继续深入研究,科学有效地进行紧急情况下的航线智能规划,以及提高民用航空的低空探测和飞行能力。
猜你喜欢
航空发动机(2021年1期)2021-05-22 01:20:30
民用飞机设计与研究(2020年4期)2021-01-21 09:15:50
河南科学(2020年3期)2020-06-02 08:30:14
电子制作(2019年11期)2019-07-04 00:34:36
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
智富时代(2018年3期)2018-06-11 16:10:44
纤维复合材料(2018年4期)2018-04-28 08:45:42
中国交通信息化(2017年12期)2017-06-06 07:23:53
中国公路(2017年13期)2017-02-06 03:16:33