舰船导航系统架构发展概述
2019-05-06 06:21:48廖成毅王能军
船舶 2019年2期
廖成毅 杨 颖 王能军
(中国船舶及海洋工程设计研究院 上海200011)
引 言
伴随着人类航海活动的发展,船舶导航学科也经历了由古代的太阳/北极星天文导航、路标定位、推算航法等航海方法,到近代的磁罗盘、海图、四分仪等航海技术,现代先进的无线电、卫星、惯性等导航技术的发展历程[1]。技术的进步缘于航海作业任务需求的不断提高,人类最初的航行任务为航渡、远洋探险等,逐渐发展为海洋测量、远洋科考、军事活动等多种作业使命任务,为此航海作业对保障系统要求越来越高,随之而来的是导航参数种类的多样化、多元化、复杂化,导航也由单一设备导航发展为多元设备信息融合导航。
任务系统对导航参数需求的变化直接影响了导航系统架构设计。船舶各系统以及分系统内部信息交互的信息量越来越大,信息传输实时性要求越来越高,促使信息传输技术取得了很大的发展。导航系统作为舰船平台系统和其他任务系统的时空基准信息的唯一来源,设计高可靠性、安全性、实时性的导航系统架构,对于保障舰船航行安全并完成舰船的使命任务,具有重要的意义。
1 主要架构及优缺点分析
导航装备体系建设与发展,推动着船舶导航设备由单一化向多元化方向发展。设备的增多进一步促使船舶导航朝着体系化方向发展,主流船舶导航系统架构主要经历了星型串口结构、CAN总线结构、以太网结构三个阶段。为了更好地发挥保障系统的功能,导航系统架构的设计成为总体顶层设计时需重点考虑的问题之一。
1.1 单机单控模式
串口通信指设备之间通过数据信号线、地线、控制线等,按位进行传输数据的一种通讯方式,其最重要的参数是波特率、数据位、停止位和奇偶校验,由于其异步传输特性,即可在使用一根线发送数据的同时,用另一根线接收数据。此种通信方式原理较简单,能够实现远距离通信,长度可达1 200 m。目前常用的有RS422和RS485两种协议。
对于早期设计船舶(诸如水船、柴油船、登陆艇等),一方面受制于导航装备本身的技术水平,设备仅能提供位置、速度、水深、航向等基本航海信息,另一方面,船舶本身任务使命的单一性,使得任务系统对保障设备即导航系统需求并不高。这类船舶导航系统设计具有两个特点:一是系统内设备之间无需进行信息数据融合处理,除了电子海图需要位置等信息进行相关计算外,其他设备间几乎没有数据通信需求;二是外部系统与导航系统之间几乎不发生信息交互。
1.2 串口数据架构
严格来说,上述船舶导航设施设计时,并未进行系统结构体系化设计,还不能称之为系统。国产某型登陆舰、铺缆船等开始从系统结构体系的角度出发来进行船舶导航系统设计,主要结构如图1所示。
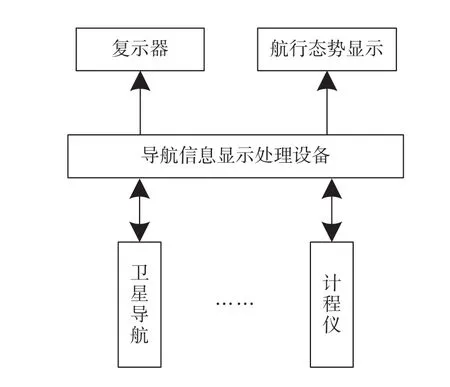
图1 导航系统星型架构示意图(串口)
图1所示星型结构的导航系统主要工作原理为:导航设备采集位置、航向、航速等数据,通过串口接口传输至导航信息显示处理设备,并进行实时数据融合处理,再根据外部用户需求,直接由综合导航显控台提供对外串口。该结构已经初步实现了导航信息的实时数据融合处理、集中显示以及统一分发的结构形式。这种结构的优点在于经综合导航显控台处理后的导航信息为全船统一的基准信息,并可在一定程度上避免单一设备串口输出数量限制。
通过串口这种直连方式进行数据传输,信源信宿关系清晰,只需要设备两两间接口协议协调一致即可;另外,其具有容易展开故障排查工作,在设备具备富余输出串口时外部扩展用户牵连工程小等优点,但是这种通信方式的缺点也显而易见:设备主板硬件的串口数量有限,而串口扩容容易引起信号衰减,即串口可扩展性较差;当设备较多、信息需求增加时,设备两两间连线会相应增多,从而造成电缆走线布局复杂等情况,星型系统结构仍然存在这些问题。从图1可以看出,导航设备间的信息交互以及下游设备(复示器等)的导航信息接收都严重依赖于导航信息显示处理设备,不利于信息交互的可靠性。综合考虑上述原因,基于串口通信的星型架构仅适用于导航系统内部、外部信息交互较少的船舶。
1.3 双冗余CAN总线数据架构
CAN总线是一种有效支持分布式控制或实时控制的串行通讯网络,能够实现全分布式多机系统,可以点对点,一点对多点以及全局广播集中方式发送和接收数据[2-3]。总线通过总线访问、仲裁、编码/解码、出错标注、超载标注5条规则进行通讯协调,具备速度快、可靠性高、可扩展等一系列优点,其基于无破坏性仲裁机制,保证了总线能以最高优先权访问报文而无延时情况。CAN总线采用了OSI模型中的物理层和数据链路层,协议分层结构如图 2所示[4]。
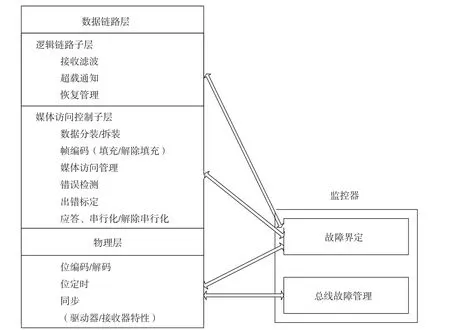
图2 CAN协议分层结构示意
由于CAN总线数据传输的实时性和可靠性,CAN总线架构广泛应用于工业自动化、消防监控等领域,其中较为典型的应用为汽车和高铁的数据通讯。船舶系统局域网应用CAN总线技术起步较晚,某型救援船首次将该总线技术成功的应用于导航系统设计:采用双冗余CAN总线架构设计思路,将全船所有导航设备采集导航信息接入CAN总线(局域网),经综合导航信息处理设备进行多源数据融合、信息择源处理等形成统一导航信息,并完成对外用户信息分发工作,最终形成了导航信息的分层采集、集中处理、统一分发的体系。
除实时性和可靠性外,采用CAN总线设计的导航系统的特点具体为:
(1)总线网络采用单总线多主模式,总线的仲裁机制可以按照优先级对报文进行无损的排序发送,各个接入总线设备可随时向CAN总线发送信息和获取信息,从而保证系统的可靠性和实时性,相比于图1串口结构,提高了导航设备间信息交互可靠性;
(2)由于导航参数诸如位置、姿态等均由多个设备提供(包含经综合导航显控台设备数据融合处理后的信息),需根据同类参数不同设备的精度、可靠性等明确信息优先级,用户设备(仅限导航系统)则从优先级最高的信息进行数据接收;
上海、南京、杭州三地位于中国的华东地区。其中,上海位于长江出海口南侧,地理坐标为东经120°52′至122°12′、北纬30°40′至31°53′之间,市中心人民广场地理坐标为东经121°28′,北纬31°14′;南京位于江苏省的西南部,地理坐标为北纬31°14′至32°37′、东经118°22′至119°14′之间,市中心新街口地理坐标为北纬32°02'38"、东经118°46'43";杭州位于浙江省北部,地理坐标为东经118°21′-120°30′、北纬29°11′-30°33′之间,市中心地理坐标为东经120°12′,北纬30°16′。
(3)采用双冗余CAN总线方法目的在于实现总线热备份,即系统运行时,两路CAN总线同时运行,一主一辅,通过配备切换控制器,实现主系统、辅系统实时切换。
双冗余CAN总线数据架构见图3。
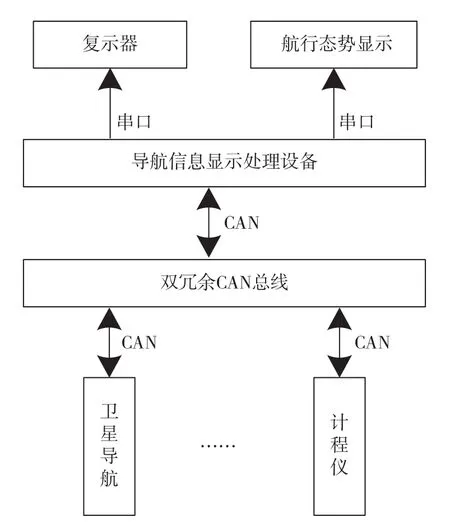
图3 双冗余CAN总线数据架构示意图
此外,相比于图1串口数据架构模式,基于双冗余CAN总线数据架构设计的导航系统有效解决了导航设备间信息交互的可靠性问题,但是外部用户设备仍然需从导航信息显示处理设备接收导航信息,要求该设备具备尽可能高的可靠性,因此在一定程度上影响了信息保障能力。
1.4 CAN总线和以太网多层数据架构
随着航海作业的任务多样化,平台系统、任务系统、作战系统等对导航参数种类的需求增多,除了常规航海信息外,还主要包括有航海作业信息、导航雷达信息、气象水文环境要素信息等。这些数据较突出的特点是数据量大(单报文字节数≥100)、数据更新率较慢(≤1 Hz)。考虑到CAN总线上任意两个节点之间的最大传输距离与位速率有关[4](见表1),而新研船舶由于吨位大,传感器设备布置距离较远,受数据报文长度和CAN总线长度影响,大流量数据会严重影响数据传输的实时性和稳定性,因此单纯的CAN总线架构已无法满足使用需求。
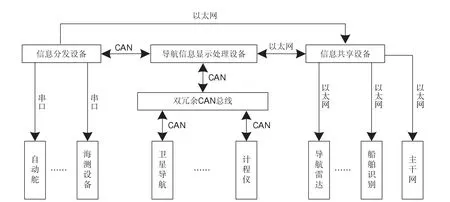
图4 多级网络数据共享架构示意图
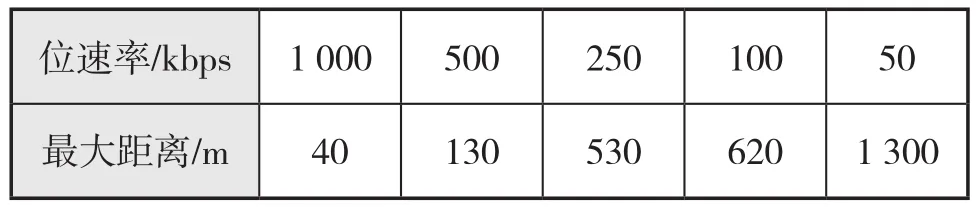
表1 CAN总线两节点之间的最大距离
以太网在自动化控制中的快速发展,促进了现场总线网络与以太网的紧密结合。为解决上述大数据量、弱实时性信息的交互问题,某新型驱逐舰、补给船采用了多级网络数据共享的技术设计导航系统架构,以信息处理流程为依据将导航系统结构划分为传感器层、信息采集处理层、信息应用层及信息服务层四个层次,参照结构示意见图4。信息关系可简单描述为:由双冗余CAN总线的信息采集处理层完成导航系统内部实施信息的采集、共享;信息共享服务设备组成的信息服务层,一方面实现了导航系统内部局域网功能,完成大数据量信息的交互,另一方面可通过主干信息网向全船用户提供包含大数据量信息的全量导航信息。
多级网络数据共享的架构原理为:采集的导航信息由导航信息显示处理设备进行数据融合处理,并通过CAN总线发送至信息分发发送设备,对于具有强实时性信息需求的外部用户,则统一由该设备以串口、模拟口形式一对一发送,对于具有弱实时性信息需求的外部用户,则统一由信息共享服务设备向全船主干信息网以组播形式发送;对于可靠性要求较高的用户则同时采用串口和以太网两种方式获取导航信息,即从信息获取方式上进行冗余性设计。相较于图3,多级网络数据共享形式有效解决了信息采集交互过程中高实时与大容量间的矛盾。
1.5 单层以太网数据架构
虽然CAN总线具备有其独特的优点,但是由于船舶平台本身属性即船体较大、设备分舱布置、设备数量较多,造成了基于CAN总线架构的船舶导航系统具有CAN总线长、节点多的特点,使得在调试过程中经常出现CAN总线瘫痪现象,而各设备厂家采用CAN卡型号不一致,设计负载驱动的电路、采用的触发机制等不一致,这种设备本身硬件原因对排故带来一定难度,这些问题都需要耗费大量的人力物力去进行调试解决,同时船舶行业通常不会出现大批量复造的情况,而不同船型可能会出现不同问题,因此从经济角度出发,CAN总线数据架构并不适合船舶导航系统设计。
从共享到交换、从半双工到全双工、从10 Mbps到10 Gbps,以太网技术的发展越来越成熟,其高效、低成本和兼容性的优点,使得以太网在进行系统局域网设计中逐渐处于主导地位。近几年新设计的舰船导航系统主要采用基于双冗余以太网的单层网络架构形式,同样可划分为传感器层、信息采集处理层、信息应用层及信息服务层四个层次。信息采集处理层采用双冗余以太网实现导航参数的采集与内部交互,并对获取的各类信息进行融合优化,在导航信息显示处理设备上实现主要导航参数、信息通道及设备状态的集中显示;信息应用层主要完成导航信息的综合运用,实现海图标绘等航海作业功能;信息服务层包括信息分发备及信息共享服务设备,可为各平台、任务系统提供融合处理后的综合导航信息、实时舰艇运动参数信息等。结构示意图见图5。
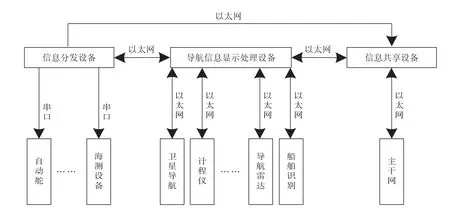
图5 以太网数据架构示意图
目前国内已有几型新研船舶采用了基于双冗余以太网技术的单层系统架构来设计船舶导航系统,根据当前实船验证情况,导航系统运行稳定可靠,这种架构设计在可用性、可靠性、开放性、以及可扩展能力等方面已基本满足舰艇信息化发展的需求。
2 结 语
美国海军DDG 1000驱逐舰采用全舰公共计算环境(TSCE),代表了当前舰船信息系统高度集成技术的最先进水平[7]。作为作战系统下的二级系统,导航系统可充分利用公共计算环境技术,将导航设备硬件和软件分离,进行软件、硬件模块化以及构件化和服务化,采用面向服务架构实现导航系统软件集成,从而进一步提升系统的高度集成优化水平,使得导航系统具有更好的自适应性和高可用性。
另外,云计算和互联网通信技术的发展引发了信息化领域翻天覆地的变化。船舶行业目前研究较多的为动态监控系统[8]、货运远程管理[9]、航运信息服务等方向,为实现岸-海一体化目标,船舶导航系统(时空基准信息系统)可通过云计算技术实现岸基信息远程保障、船舶导航系统状态远程监控、临近海域内船舶导航信息资源共享等功能。在未来进行船舶导航系统设计工作时,需要结合相关技术的成熟应用、船舶导航体系建设情况展开,从而提升导航系统信息保障能力。
在信息化技术飞速发展的大环境下,作为船舶时空基准信息的保障系统,导航系统的接口信息已逐渐由信号级发展到数据级,再到元数据级,其接口设计也由点对点物理连接发展到网络物理连接,再到逻辑的数据集成总线连接。为了更好地保障船舶航行安全、保证使命任务的完成,进行系统设计时,应当从海上任务体系规划入手,以满足新形势下船舶的使命任务为目标,结合需求,设计面向服务的导航系统,增强总体顶层设计和集成能力,综合考虑全舰公共计算环境以及云计算等先进技术,设计可靠性高、实时性强且能满足船舶多样化任务系统的信息保障需求导航系统架构。
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
装备制造技术(2020年1期)2020-12-25 05:18:20
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2017年24期)2017-02-02 07:14:44
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26
电源技术(2015年7期)2015-08-22 08:48:48