预警机雷达探测性能评估与仿真分析
2019-04-27 02:29:14张杲旻姜志敏李永伟
舰船电子对抗 2019年6期
张杲旻,姜志敏,李永伟
(空军预警学院,湖北 武汉 430019)
0 引 言
预警机是一种大型、全天候、多传感器空中预警与指挥控制飞机,比地面雷达具有更强的低空、超低空探测能力、战场指挥能力和机动能力[1]。但是,目前对于预警机的探测性能的评估却是一个具有挑战性的问题,这是由于:(1)预警机雷达采用下视工作方式,面临着比地面雷达更为严重的地物杂波,这势必会对预警机雷达静态探测效能产生严重影响;(2)预警机在执行巡逻警戒任务时飞行航线选择的多样性与不确定性,导致其动态威力覆盖范围的不确定性。因此,本文针对上述2个因素,首先研究了地杂波对预警机雷达静态探测威力的影响,实现了杂波环境下的雷达静态探测威力评估,并提出了有效减弱杂波影响的合理化建议;而后在此基础上系统分析评估了不同巡逻航线的预警机动态探测能力,并得出了一系列有益结论,可为预警机的作战规划提供重要参考。
1 杂波环境下的预警机雷达探测威力评估
1.1 杂波特性
图1是机载预警雷达的探测示意图,假设载机水平匀速飞行,速度为VR,其中雷达主波束指向的方位角为θ,俯仰角为φ,空间锥角为ψ。

图1 预警机雷达探测示意图
由图1可知由于雷达波束下视,机载预警雷达的回波势必会包含各种地物杂波。机载预警雷达杂波通常分为主瓣杂波、旁瓣杂波和高度线杂波[2],各类杂波频谱的分布示意图如图2所示。

图2 预警机雷达杂波频谱分布示意图
主瓣杂波即地物回波从天线主波束进入所产生的杂波。预警机雷达的主杂波频谱与天线主波束的宽度、指向角、载机速度、发射信号波长及地物的变化等因素有关。其中心频率可表示为:
(1)
地物回波从天线旁瓣进入则形成了旁瓣杂波。由于波束锥角范围为[-180°,180°],可知其频谱范围为[-2VR/λ,2VR/λ]。
由于载机正下方地物距离雷达最近,垂直反射强,所以在任何时候,在零多普勒频率处总有一个较强的旁瓣杂波,称之为高度线杂波。值得注意的是,高度线杂波也具有一定的频谱宽度。
需要说明的是,图2中的清洁区是指杂波多普勒频率未能达到的频率范围,若某一目标位于清洁区,则通过后期雷达信号处理后可认为目标信号几乎不受杂波影响。
1.2 杂波对机载预警雷达探测距离的影响
(1)清洁区机载预警雷达探测距离
雷达的自由空间探测距离受噪声限制,机载预警雷达探测距离方程为[2]:
(2)
式中:(S/N)为信噪比;Pt为发射峰值功率;G为发射天线的定向增益;A为接收天线有效孔径面积;σ为目标的雷达截面积;R0为自由空间下雷达最远探测距离;Ts为系统温度;Bn为接收机带宽;Ls为系统损耗因子。
(2)杂波区机载预警雷达探测距离
而在杂波背景中检测目标时,机载预警雷达探测距离方程为:
(3)
式中:(S/(C+N))为预警雷达的信杂噪比;RC为杂波背景下雷达的最远探测距离。
从式(3)可得,与自由空间相比,在杂波背景中探测目标时探测距离必然要下降,联合式(2)与式(3),则可得到杂波背景下雷达探测距离RC和自由空间雷达探测距离R0折算公式为:
(4)
该式表明杂波环境中的雷达探测距离只与杂噪比有关,若已知自由空间的雷达探测距离以及经过处理后的剩余杂噪比大小,便可直接推算得到杂波环境中的雷达探测距离。表1则为几组杂波剩余典型值对应的Rc/R0的值。

表1 杂波剩余典型值对应的Rc/R0的值
1.3 单机预警雷达探测威力评估
由1.1~1.2节的分析可知,杂波的存在会显著削弱机载预警雷达的最大可探测距离,且预警机对某个目标的探测距离不仅仅与杂波强度有关,还与目标的多普勒频率等因素息息相关。因此,为了更准确地评估预警机在杂波环境中的探测威力,本文假设某一目标以300 m/s的速度朝着同一方向径直飞行,载机速度为190 m/s,预警机雷达在自由空间的最大探测距离为410 km。则目标处于预警机不同方位时的示意图如图3所示,而目标处于不同方位时对应的目标频率与杂波频率在频谱中的相对位置则如图4所示。

图3 目标与预警机相对方位示意图

图4 目标多普勒频率相对位置示意图
由图4可知,当目标处于图3中①、⑤位置,即预警机的正前方或者正后方时,目标频谱位于杂波清洁区,因此不受杂波影响,预警机在这2个方位上的探测距离为410 km;当目标位于图3中②、④、⑥、⑧位置,即预警机的侧面时,目标频谱位于旁瓣杂波区,假设经杂波抑制处理后杂波剩余为0 dB,则可由式(4)折算得目标落入旁瓣杂波区时预警机的探测距离大约为340 km;当目标位于图3中③、⑦位置,即预警机的正侧面时,此时目标径向速度为零,目标因落入主杂波区(高度线杂波区)被遮挡而无法检测到,因此预警机在这2个方位上的探测距离为零。由此可得出预警机在整个方位上的雷达探测威力覆盖图,如图5所示。

图5 预警机探测威力覆盖图
由图5可知,实际作战运用中,预警机雷达由于受杂波影响,其威力覆盖范围并非是以本身为中心、以最远可探测距离为半径的一个圆。杂波的影响使得预警机雷达在某些方位上出现探测距离严重衰减甚至无法探测的情况,从而产生探测盲区,这将严重影响预警机执行巡逻警戒任务的能力。
1.4 双机协同机载预警雷达探测威力评估
由1.3节分析可知,单架预警机由于受杂波影响,探测威力存在一定程度的衰减和盲区,难以发挥出最优的作战效能。为了弥补这一缺陷,进一步扩大预警机的威力覆盖范围,提高预警机的探测能力,本节进一步分析基于信号级融合[3]的双预警机协同的探测性能。
与传统基于检测级融合的多预警机协同探测部署[4-5]不同的是:一方面,本节假设2架协同探测的预警机将在巡逻航线上保持相对静止,互相补盲,共同执行对某一重点区域的巡逻任务,这将会显著扩大单部预警机的威力覆盖范围;另一方面,各协同预警机改变先检测再融合的传统模式,直接将原始雷达接收信号进行先融合再检测,理论上,原始信号包含的信息最丰富,因而融合后检测的性能也会更佳。
假设某2架预警机1和2(间隔d)以相同速度沿巡逻航线保持相对静止飞行,双机系统的配置形式如图6所示。预警机1、2相距50 km,则两机融合协同后的探测威力覆盖图如图7所示。

图6 双机系统协同配置示意图

图7 融合协同后预警机探测威力覆盖图
比较图5与图7可知,协同补盲后预警机的探测威力覆盖基本能够恢复到以预警机为圆心、以最远探测距离为半径的理想水平。需要注意的是,补盲效果好坏的关键是选择合适的两机间隔d。
2 预警机巡逻航线威力覆盖评估
2.1 典型巡逻航线样式
当预警机领受作战任务后,其与护航战斗机在空中形成编队,并飞至作战任务方案中指定空域,根据飞行空域气象条件和作战任务,采用不同巡逻航线样式,进行循环式巡逻飞行。为了获得较好的低空目标探测效果,预警机一般巡逻航线高度在6 000~10 000 m左右,并且为获得稳定性高和目标感知信息误差小等测量效果,其巡逻航线一般稳定在同一高度层,遂行预警监视作战任务期间,不改变飞行高度。如图8所示,预警机常用巡逻航线样式分为双平行线形、横8字形和圆形[6]。

图8 预警机巡逻航线样式
(1)双平行线形。因其航迹类似于跑道,故又称跑道形,它的特点是预警机转弯半径小,直线飞行边较长,便于预警机对宽正面且具有一定纵深的空中目标进行连续预警指挥。双平行线形巡逻航线是较常用的一种预警机巡逻航线样式,主要用于前伸预警监视,其直飞航线一般面向敌方来袭方向,巡逻空域无较大侧风时使用。
(2)横8字形。又称交叉线形,这种航线样式虽然与双平行线的飞行轨迹有所区别,但实际效果和使用方法与双平行线形较为相似,都可以对宽正面且具有一定纵深的空中目标进行连续指挥和控制。横8字形巡逻航线主要在巡航空域有较大侧风时使用,其斜飞直线可减小侧风与其飞行方向的夹角,从而提高空中飞行的安全性。
(3)圆形。当空袭兵器可能从不同方向对地面某一重要目标或海上舰船编队实施突击时,为了对保卫目标提供全方位、连续不断的空情预警,空中预警机可采取以保卫目标为中心,以一定的巡逻半径围绕保卫目标做圆形飞行。
2.2 几何评估模型
2.2.1 总覆盖区
对于预警机而言,总探测覆盖区是指其在特定高度巡逻航线上巡逻时,能够覆盖到的总区域。当预警机采用双平行线形巡逻航线样式遂行作战任务时,令预警机巡逻直飞航线长度为L、转弯直径为W,机载预警雷达在H高度层的最大作用距离为RH,其总探测覆盖区S0如图9阴影区域所示[7]。

图9 双平行线航线总探测覆盖区
显然,总探测区域面积S0由2个半圆组成的一个圆的面积S1加上矩形EFGH的面积S2组成:
S0=S1+S2
(5)
S1=π(RH+W)2
(6)
S2=2(RH+W)L
(7)
2.2.2 稳定覆盖区
稳定探测覆盖区是指其在特定高度巡逻航线任意位置,均能以规定的发现概率Pd和虚警概率Pfa,对位于高度层H上的指定目标遂行有效探测的区域。所谓指定目标是指目标类型和目标的RCS值均已确定,所谓有效探测是指对目标进行数据率为fc的不间断探测。当预警机采用双平行线形巡逻航线样式遂行作战任务时,其稳定探测覆盖区如图10阴影区域所示。
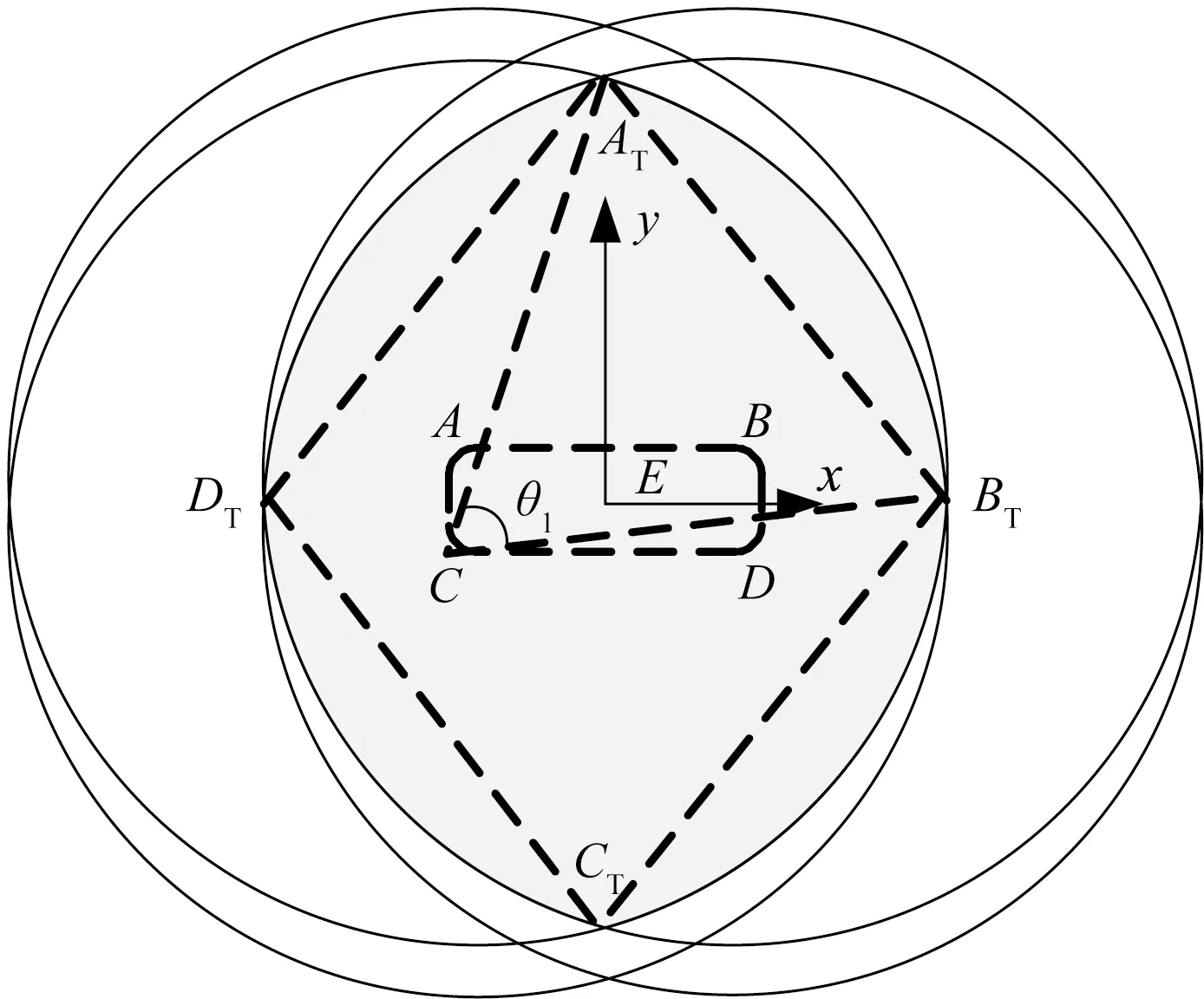
图10 双平行线航线稳定探测覆盖区

S3的具体估算公式为:
S3=S4+S5-S6
(8)
式中:S4为四边形ATBTCTDT面积;S5为4条弧对应4个圆心的扇形面积之和;S6为四边形各边与4个相应圆心构成的4个三角形面积之和;θ1为∠ATCYBT,且:
(9)
(10)
(11)
(12)
(13)
将式(9)~(13)代入式(8)即可得预警机采用双平行线形巡逻航线时的稳定覆盖区面积。
2.3 动态评估模型
由上节分析可知,威力覆盖范围的几何评估模型与具体的巡逻航线样式有关,当巡逻航线样式改变时,几何模型也必须要重新建立,且只适用于具有规则几何形状的巡逻航线,因此不具有普适性,不利于各种不同巡逻航线样式的分析与比较。而动态评估模型则是利用交并集的思想,将航线中的任意一点都考虑进来,不受航线几何形状限制,更具有普适性。下面介绍动态评估模型的基本思想。
预警机是一个移动的空中雷达站,假设预警机在空中不动,经协同补盲后其探测范围是以预警机为圆心、以机载预警雷达探测距离为半径的一个圆,即瞬时探测覆盖区。不妨以预警机在巡逻航线上飞行1圈为例,令ts是预警机从起点出发时刻,te是预警机飞行1圈回到起点时刻,ti∈[ts,te]为预警机处于航线中任意一点的时刻,则在ti时刻,预警机瞬时探测覆盖区面积Sm为:
(14)
当预警机沿巡逻航线做往返飞行时,其探测圆便会随之一起运动,其所能探测到的区域即为总覆盖区,即预警机瞬时探测覆盖区并集。在协同补盲后,且不考虑外部干扰的影响,假设其总探测覆盖区面积为Su,则其估算模型为:
(15)
同理,稳定覆盖区面积Sv即为预警机瞬时探测覆盖区的交集,其估算模型为:
(16)
3 仿真分析
3.1 常规巡逻航线样式威力覆盖仿真分析
本节利用动态评估模型,对几种典型巡逻航线的威力覆盖范围进行仿真评估。假设对于某一高度层的空中目标,其最大作用距离RH=410 km,令转弯点水平距离(圆形航线的直径)L=100 km,转弯直径W=30 km,则可得出3种典型巡逻航线的威力覆盖范围如图11~图13所示。

图11 双平行线航线探测威力评估

图12 横8字形线航线探测威力评估

图13 圆形航线探测威力评估
由图11~图13可得,在特定航线参数一致的情况下,总探测区面积:双平行线形>横8字形>圆形,而稳定探测区面积:双平行线形=横8字形>圆形。易发现,双平行线形与横8字形的稳定探测区面积相等,而双平行线形航线的总探测区面积要更大些。
3.2 威力覆盖面积随L变化仿真分析
因为转弯半径W是由预警机转弯飞行速度和转弯坡度角决定,一般在预警机型号确定后,其不论在何种样式的巡逻航线上飞行,均会采用最佳转弯直径,故而W一般为定值。而以上结论是在L=100 km时的仿真结果,具有特殊性,因此还需进一步分析不同L情况下的仿真结果,以获得更科学的结论。
图14、图15为不同巡逻航线的探测覆盖区面积随L变化的曲线图。由图14、图15可知,圆形航线的稳定覆盖面积在L较小(L<90 km)时有优势,随着L的增加,优势逐渐减少,甚至不如其它2种航线,总探测覆盖区面积变化规律则恰好相反;而值得注意的是,无论L取何值,双平行线形与横8字形航线的稳定覆盖区总是相等的,但总探测覆盖区面积双平行线形要略大于横8字形,且随着L的增大面积差也在增大。

图14 稳定探测区面积随L变化曲线

图15 总探测区面积随L变化曲线
3.3 混合式巡逻航线威力覆盖仿真分析
为了进一步探究双平行线形航线与横8字形航线稳定覆盖区相等的本质,看其二者之间是否具有任意互换性,设计图16混合式巡逻航线样式,图中D为平飞距离。

图16 混合式巡逻航线
令L=100 km,其它参数不变,得出探测覆盖面积随D的变化曲线如图17~图18所示。

图17 稳定探测区面积随D变化曲线

图18 总探测区面积随D变化曲线
由仿真结果可知,随着D增大,稳定覆盖面积不变而总探测覆盖面积增加,由于D从零增加到L的过程即为双平行线形航线变化为横8字形航线的过程,这意味着预警机在执行巡逻警戒任务的过程中,可以任意选择转弯变换点实现2种形式的航线互换而不会对稳定探测面积造成影响,也就是说二者之间具有任意互换性。
4 结束语
本文在系统分析研究地杂波对于预警机雷达静态探测威力影响的基础上,对预警机的不同巡逻航线的动态威力覆盖范围进行了评估与仿真分析,并得出了一系列结论:
(1)无论何种巡逻航线,稳定覆盖探测面积总是随着航线直径L(转弯点水平距离)的增大而减少,总探测覆盖面积则相反。
(2)由于圆形航线在航线直径(转弯点水平距离)较小的时候稳定覆盖面积更大一些,因此更适合用于敌来袭方向未知的对中心重点区域进行连续不间断的稳定覆盖探测。
(3)由于双平行线与横8字形的航线稳定覆盖区面积始终相等,而总探测区面积双平行线形略大于横8字形,因此在已知敌方可能来袭方向的情况下,为了使得预警机发挥出最佳作战效能,在气象条件良好无侧风条件下,应该优先选用双平行线形航线。
(4)由于双平行线与横8字形的航线二者之间具有任意互换性,因此可根据战场环境需要随时选择变换点转换航线而不会影响到预警机的探测覆盖威力。
猜你喜欢
现代雷达(2023年11期)2024-01-05 15:01:52
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
成都信息工程大学学报(2018年5期)2018-12-06 09:23:52
测控技术(2018年3期)2018-11-25 09:45:52
北京航空航天大学学报(2017年12期)2017-04-23 08:31:51
小星星·阅读100分(高年级)(2016年10期)2016-09-10 07:22:44
小学阅读指南·低年级版(2015年2期)2015-03-17 14:31:11
舰船科学技术(2013年12期)2013-08-15 00:51:50
学与玩(2009年6期)2009-07-03 09:15:02