
舰船中压直流电力系统的混合储能管理策略仿真分析
2019-04-20 06:00:24郭燚于士振郭将驰李晗
中国舰船研究 2019年2期
郭燚,于士振,郭将驰,李晗
上海海事大学物流工程学院,上海201306
0 引 言
舰船中压直流(Medium Voltage Direct Current,MVDC)电力系统可综合利用全舰数百兆瓦级的能量[1-2],明显优于传统的舰船动力系统。舰船负载主要包括间歇性的武器装备、雷达、推进负载和服务性负载等,鉴于武器型负载的瞬态特性,需要极高振幅的脉冲功率源的保障。然而,传统的舰船电力系统无法支持该类脉冲负载的功率需求,为解决此问题,储能管理(Energy Storage Management,ESM)成为舰船MVDC系统的关键技术之一[3-4]。若大功率脉冲性负载接入舰船MVDC系统,一般将造成母线电压大范围跌宕,而根据相关标准,MVDC母线电压跌宕需保持在标称电压的10%内[5]。Scuille[6]认为,仅依靠发电机的机械惯量或增加额定功率是无法补偿大功率脉冲负载对系统的影响的。因此,储能系统成为解决此类问题的唯一途径。若ESM系统中仅采用能量密度大且功率密度小的蓄电池组或锂电池组,则在启用的初始阶段将无法快速跟踪脉冲负载的功率需求,而功率密度大且能量密度小的单一超级电容器组也无法满足该需求。因此,由高能量密度的锂电池组和高功率密度的超级电容器组构成的混合储能系统(Hybrid Energy Storage System,HESS)[7]能够满足此类脉冲负载需求,具备一定的应用前景。
Guo等[3]采用模糊逻辑控制对储能系统进行了能量管理,以抑制母线电压波动,但未根据锂电池组和超级电容器组的特性对功率进行滤波分频控制。Khan等[4]采用PI控制器对全电力船舶进行了能量管理,但没有考虑锂电池组和超级电容器组的能量不平衡问题。文献[8-11]设计了基于HESS混合动力汽车的能量管理策略,其中Ferreira等[8]基于燃料电池在电动汽车领域的应用需求,采用了模糊逻辑控制器进行能量管理。
为研究舰船MVDC电力系统的混合储能管理策略,本文拟针对基于ESM和低通滤波器(Low-Pass Filter,LPF)的比例积分(Proportional Integral,PI)控制、模糊逻辑控制这2种方法进行对比分析,并设计第2级模糊逻辑控制器以解决锂电池组与超级电容器组间的能量不平衡问题。根据锂电池组和超级电容器组的荷电状态进行功率再分配,以提升HESS整体的能量利用效率。
1 舰船MVDC系统的新型环形模型
Ali和 Li等[12-13]提出了舰船 MVDC 电力系统的新型环形模型(图1),可进一步减小系统体积,同时提高系统输出效率。该模型采用分区结构,在极其恶劣的工况下也能保持最佳工作状态。系统组成主要包括2台36 MW的主发电机(MGT1,MGT2)和 2台 4 MW的辅助发电机(AGT1,AGT2),分别位于舰船左、右舷。
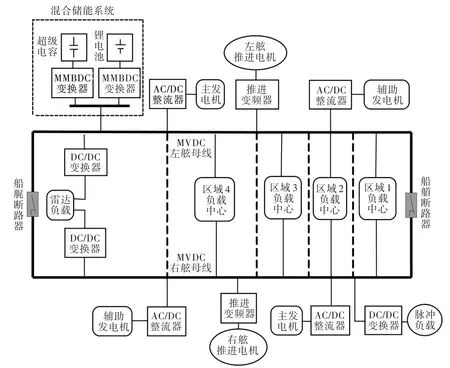
图1 新型环形舰船MVDC系统模型Fig.1 New type circular model of warship MVDC system
2 基于ESM和LPF的PI控制器
PI控制器可用于估算锂电池组和超级电容器组的总存储功率参考值Pstor-ref[14-15],控制框图如图2所示。该方案共包括2个PI控制器,其中一个PI控制器根据总负载功率Pload和总发电机功率Pgen来保持系统功率的平衡;另一个PI控制器则根据直流参考电压VDC-ref来保持MVDC母线电压Vbus的稳定。图2中:Iref为参考电流;SOCbat为锂电池荷电状态值;SOCSC为超级电容器荷电状态值。
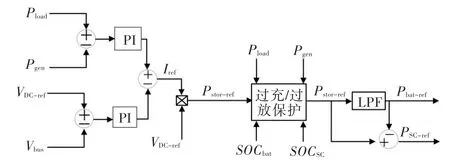
图2 基于ESM和LPF的PI控制器Fig.2 PI controller based on ESM and LPF
LPF的传递函数Gf为

式中,fc为截止频率[7]。
通过低通滤波器LPF,Pstor-ref将分离出适合超级电容器组特性的高频功率分量PSC-ref与适合锂电池组特性的低频功率分量Pbat-ref,从而对锂电池组和超级电容器组进行充放电管理。图2中的过充过放模块可用于保护锂电池和超级电容器组的荷电状态值在30%~90%安全范围内,从而避免过度充电和放电,其中过充/过放保护控制策略如图3所示。图3中,SOCbat,SC为锂电池和超级电容器的荷电状态值;t为检测运行时间;tend为预设的检测运行时间。

图3 过充过放保护控制Fig.3 Overcharge and overdischarge protection control
3 基于ESM和LPF的模糊逻辑控制器
图4所示为基于ESM和LPF的模糊逻辑控制器框图,根据MVDC母线电流变化量 ΔI,以及Vbus,SOCbat,SOCSC,即可预测 Pstor-ref。该控制器中,Pstor-ref也通过低通滤波器LPF分离出高频功率分量PSC-ref与低频功率分量Pbat-ref,从而对锂电池组和超级电容器组进行充、放电管理。
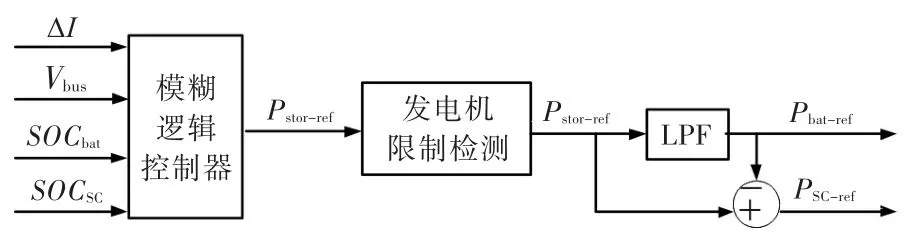
图4 基于ESM和LPF的模糊逻辑控制器Fig.4 Fuzzy logic controller based on ESM and LPF
模糊逻辑控制器的输入(ΔI,Vbus,SOCbat,SOCSC)隶属度函数,输出Pstor-ref的隶属度函数如图5所示,其中L,M,H分别表示低、中、高3种状态,相应的模糊逻辑控制规则如表1所示。
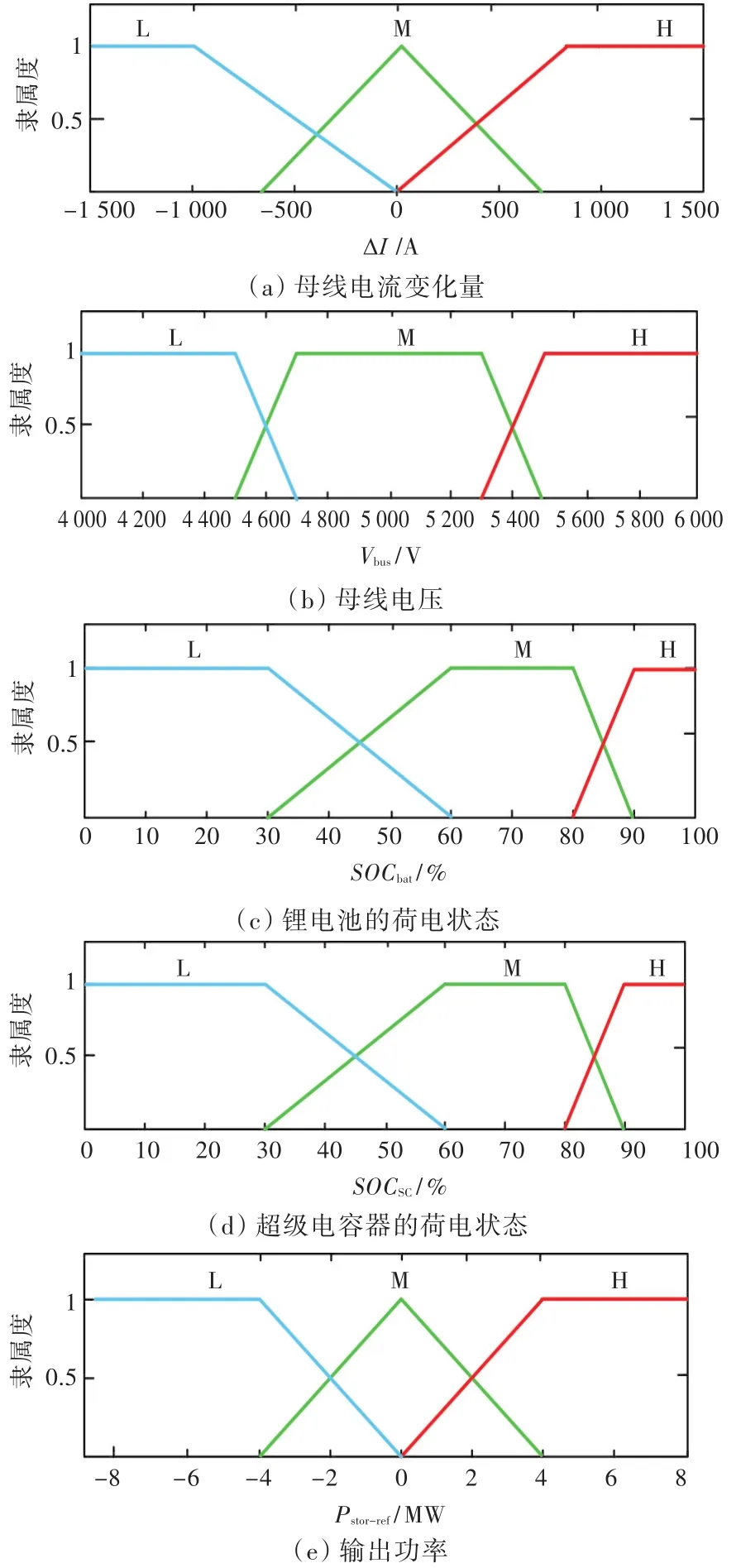
图5 模糊逻辑控制器的输入、输出变量隶属度函数Fig.5 Input and output variables membership function of fuzzy logic controller
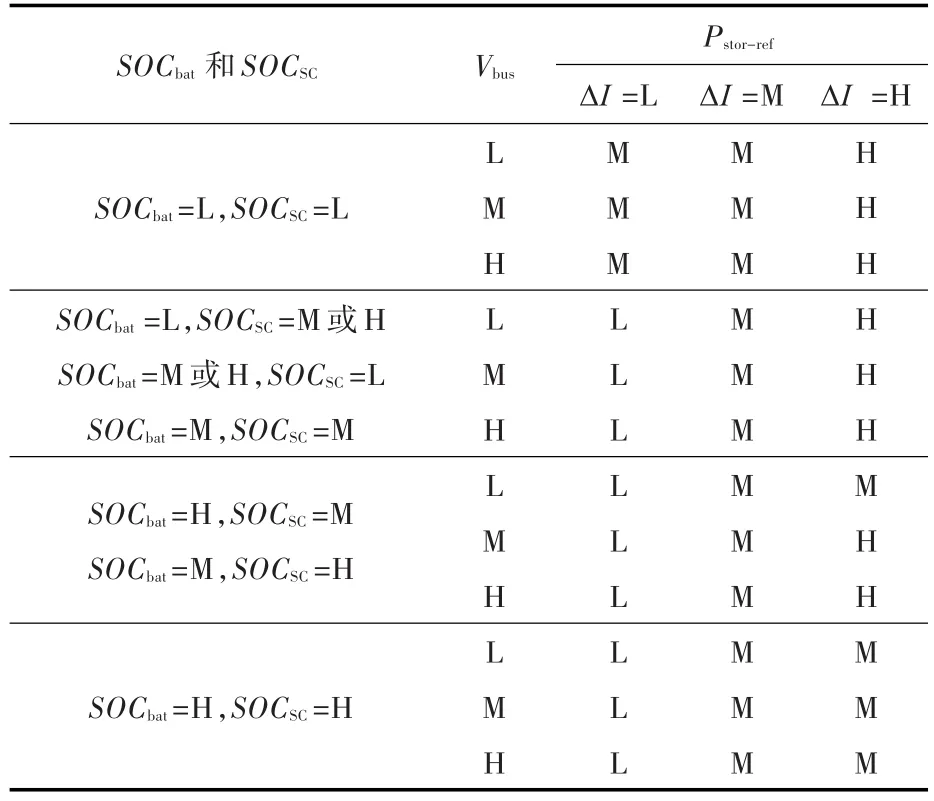
表1 Pstor-ref的模糊规则Table 1 Fuzzy rules of Pstor-ref
4 锂电池组和超级电容器组之间的功率再分配
由于锂电池组和超级电容器组的功率密度与能量密度不同,在充放电过程中易发生锂电池组能量盈余而超级电容器组能量匮乏的现象。针对这一问题,本文设计了第2级模糊逻辑控制器,用以调节二者之间的能量分配,如图6所示。图6中,P+SC-ref和P-SC-ref分别为超级电容组的释放能量和吸收能量参考功率;P+bat-ref和P-bat-ref分别为锂电池组的释放能量和吸收能量参考功率。
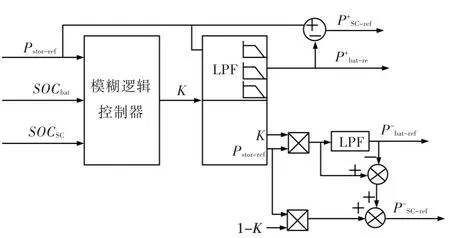
图6 锂电池和超级电容器的功率再分配控制框图Fig.6 Power redistribution control block diagram of lithium battery and supercapacitor
在第2级模糊逻辑控制器中,根据SOCbat,SOCSC,Pstor-ref的状态即可确定功率分配系数K。在放电状态下,可以通过K值调节LPF的滤波时间常数,从而协调锂电池组和超级电容器组的放电功率。在充电状态下,Pstor-ref和K的乘积通过LPF的低频分量分配给锂电池组,而Pstor-ref和1-K的乘积则与LPF的高频分量之和分配给超级电容器组,从而达到协调能量分配存储的目的。
第 2 级模糊逻辑控制器中 Pstor-ref,SOCbat,SOCSC,K的隶属度函数如图7所示,其模糊规则见表2。

图7 第2级模糊逻辑控制器的输入、输出变量隶属度函数Fig.7 Input and output variables membership function of second-level fuzzy logic controller
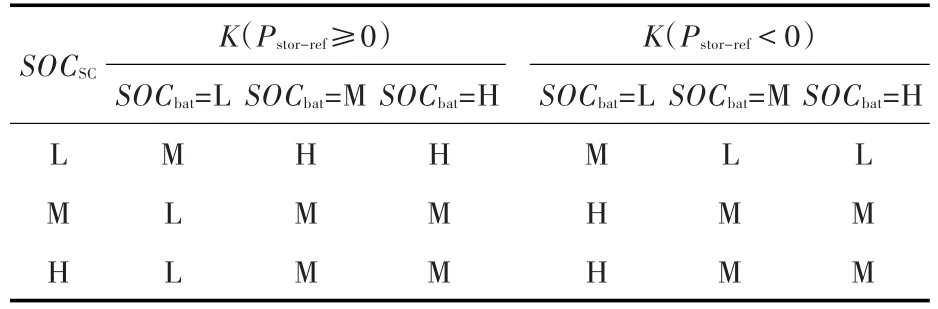
表2 K的模糊规则Table 2 Fuzzy rules of K
5 MVDC系统结构仿真拓扑结构
5.1 MVDC系统仿真模型
图8所示为5 kV级舰船MVDC能源系统的仿真模型图,包括1台36 MW的主发电机MGT、1台4 MW的辅助发电机AGT和HESS系统,其负载由恒功率负载和脉冲性负载组成。
5.2 负载等效模型
为便于研究,本文将系统负载(图8)等效为图9所示的仿真模型,用以模拟载荷功率需求。将载荷需求功率与母线直流电压相除得到的电流值送至受控电流源,即可模拟载荷功率的需求电流。
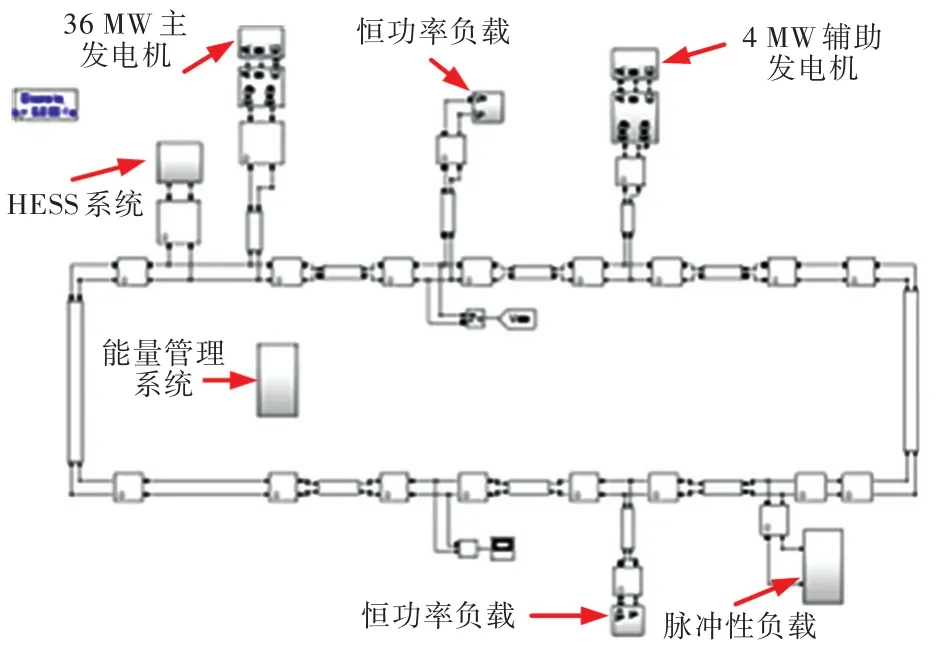
图8 5 kV舰船MVDC系统的仿真模型图Fig.8 Simulation model of 5 kV ship MVDC system
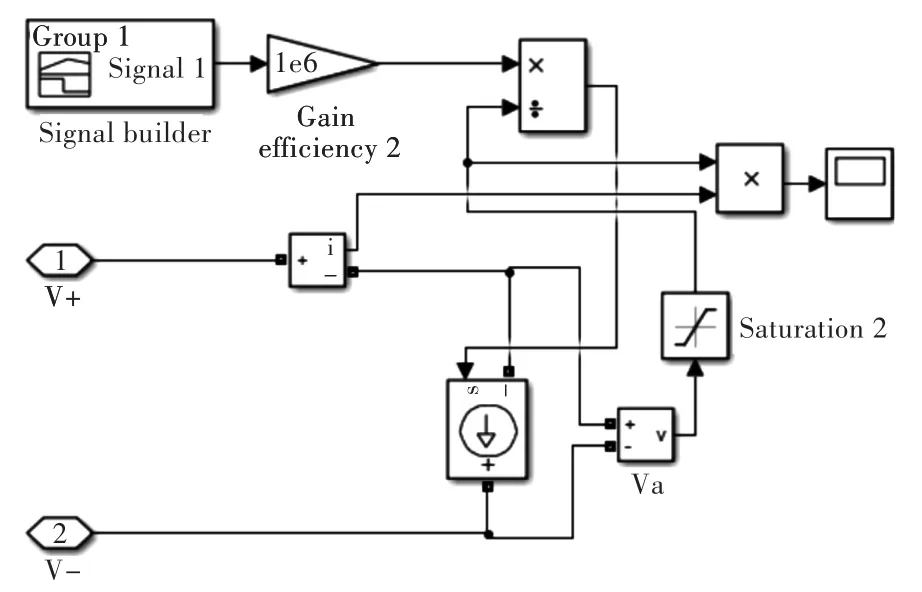
图9 负载的等效仿真模型Fig.9 Equivalent simulation model of load
5.3 双向DC-DC拓扑结构
基于Pbat-ref和PSC-ref分别对DC-DC变换器进行充、放电控制的拓扑结构及系统框图如图10和图11所示。
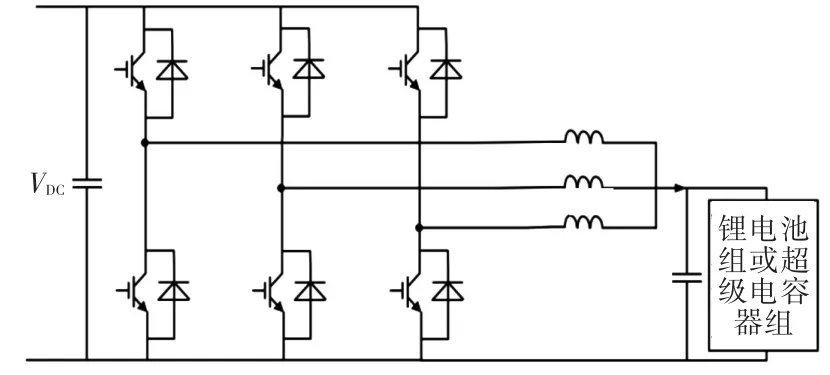
图10 双向DC-DC拓扑结构Fig.10 Bidirectional DC-DC topology
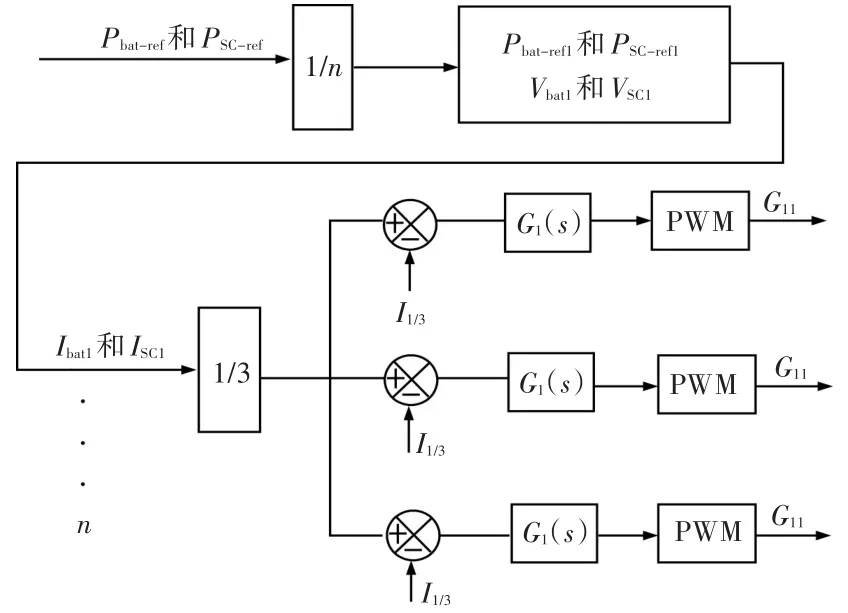
图11 锂电池组和超级电容器组的电流控制Fig.11 Current control of lithium battery pack and supercapacitor bank
图11中:n为锂电池组和超级电容器组的组数;Pbat-ref1,PSC-ref1,Vbat1,VSC1分别为第1组锂电池组和超级电容器组的需求功率和端电压;Ibat1,ISC1分别为锂电池组和超级电容器组的变换器参考电流;I1/3为DC-DC变换器的各桥臂电流值;G1(s)为电流调节器的传递函数;G11为DC-DC变换器各桥臂的PWM驱动信号。
5.4 HESS结构
图12所示为HESS混合储能结构,在HESS系统需要维护或出现故障时,可以通过断路器关闭与MVDC系统的联接。
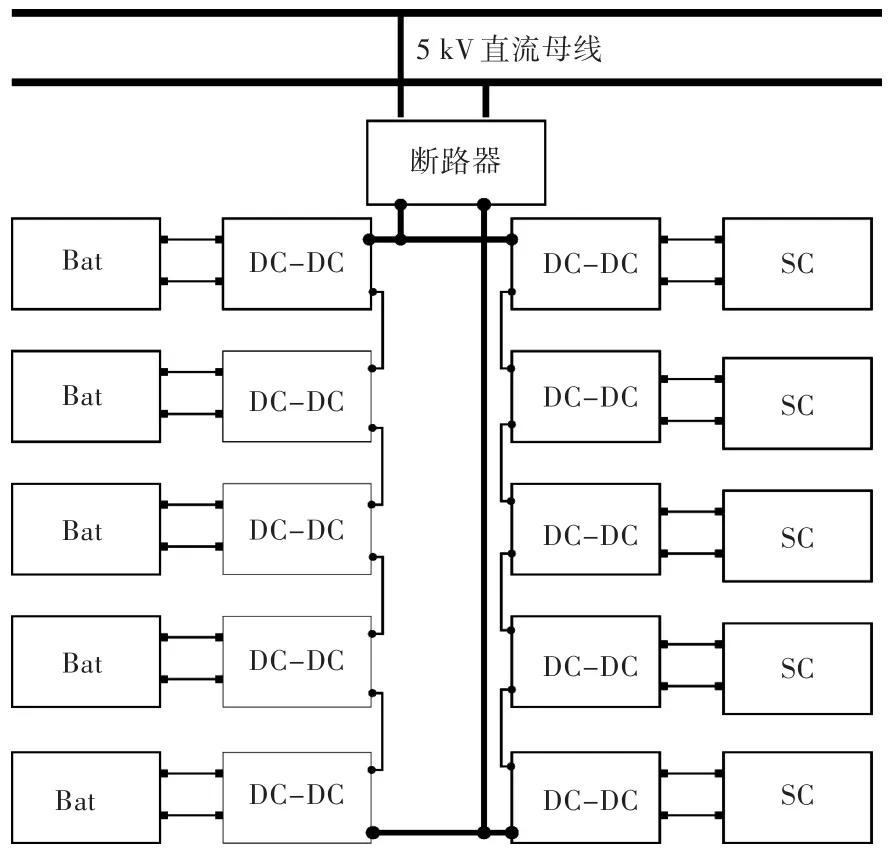
图12 HESS混合储能结构图Fig.12 Structure of HESS hybrid energy storage
HESS系统包括5组串联的锂电池组和5组串联的超级电容器组,其结构为输入并联、输出串联。这种拓扑结构的优点是:通过串联可以降低开关管的电压应力,通过交错并联可以降低开关管的电流应力,同时可以降低电压、电流纹波,从而减轻锂电池组和超级电容器组因电流纹波引起的发热现象[16]。该拓扑结构适合大电流、大功率传输工况,且可靠性高,但没有采取电气隔离措施。
6 仿真分析
6.1 参数设置
表3所示为MVDC系统参数,表4所示为锂电池组和超级电容器组的参数。
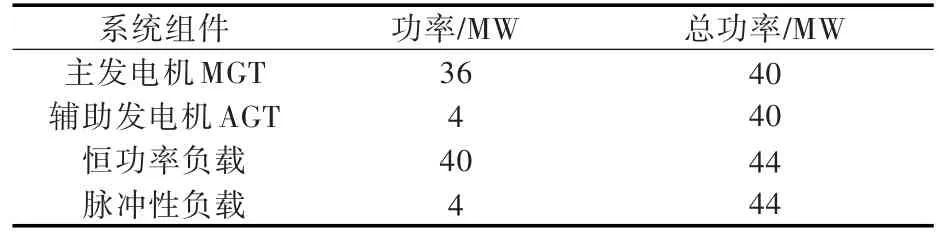
表3 MVDC系统参数Table 3 Parameters of MVDC system

表4 锂电池组和超级电容器组的参数Table 4 Parameters of lithium battery pack and supercapacitor bank
6.2 PI控制器和模糊逻辑控制器的对比分析
6.2.1 模式 1(30%≤SOCbat,SC≤90%)
该状态下,锂电池组和超级电容器组的初始荷电状态偏高,分别设为85%和84.8%。MVDC母线电压和母线电流分别如图13和图14所示。
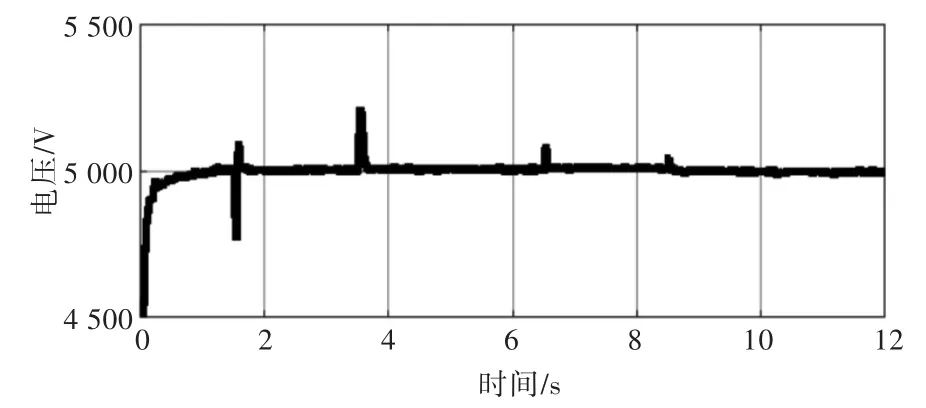
图13 MVDC母线电压Fig.13 MVDC bus voltage
由图13和图14可知,在1.5~3.5 s时刻内,4 MW脉冲性负载施加到MVDC系统上,母线电压瞬时跌落,而母线电流瞬时增加;在6.5~8.5 s时刻内,4 MW负载从MVDC系统瞬时解列,母线电压瞬时增加,而母线电流瞬时跌落。
经由PI控制器和模糊控制器产生的HESS总存储参考功率,及其经过LPF滤波后的锂电池组和超级电容器组功率如图15~图17所示。
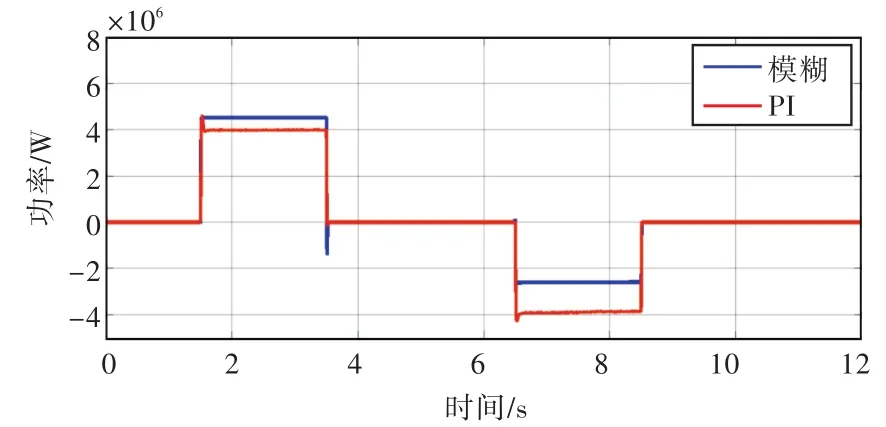
图15 HESS的总存储参考功率Fig.15 Total storage reference power of HESS
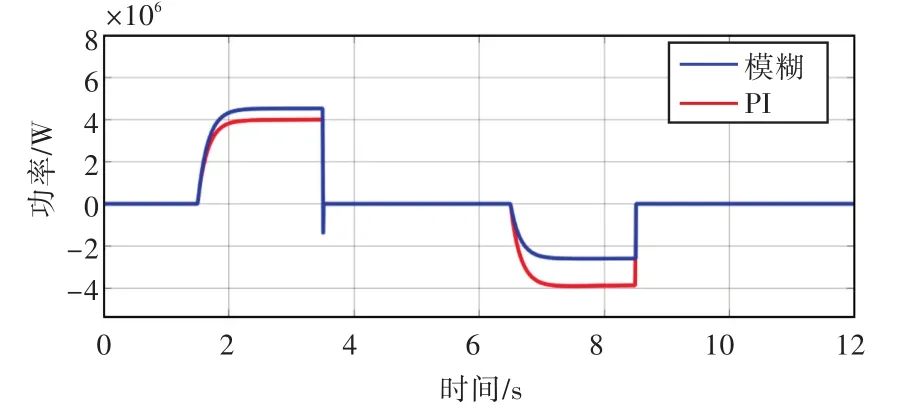
图16 锂电池组的总存储参考功率Fig.16 Total storage reference power of lithium battery pack
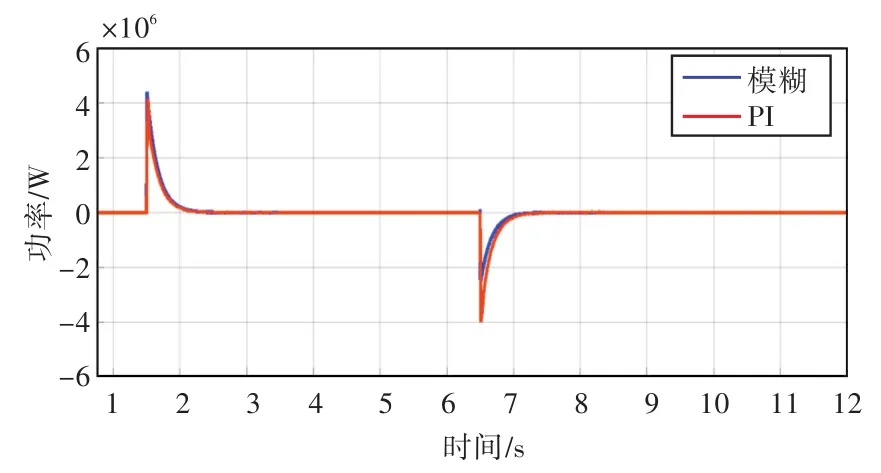
图17 超级电容器组的总存储参考功率Fig.17 Total storage reference power of supercapacitor bank
从上图可知,PI控制器可以较为准确地预测负载变化,并能通过LPF功率分频后控制HESS系统充放电,从而避免了因负载突升/突降导致的MVDC系统母线电压大范围跌宕现象。
图15中,由于锂电池组和超级电容器组的荷电状态高达85%和84.8%,即HESS系统存储了大量的去放电能量,因此,在1.5~3.5 s内模糊逻辑控制器产生的HESS实际参考功率约为4.5 MW,而不是4 MW。该工况下的实际负载需求功率为44 MW,而总可用功率约为44.5 MW,HESS系统可以释放更多的能量以响应脉冲负载的功率需求。在6.5~8.5 s时刻内,4 MW的负载从MVDC系统解列,模糊逻辑控制器产生的HESS参考功率约为-2.5 MW,但由于此时锂电池组和超级电容器组的荷电状态均较高,故HESS系统不需要进行快速充电。
在PI控制器和模糊控制器的作用下,锂电池组和超级电容器组的电压、电流、荷电状态分别如图18~图20所示。
6.2.2 模式 2(SOCbat,SC≥90%)
在该状态下,分别设定锂电池组和超级电容器组的初始荷电状态为93%,94%。经由模糊逻辑控制器和PI控制器产生的HESS存储功率如图21所示。
从图21可以看出:在1.5~3.5 s时刻内,4 MW脉冲性负载加载到MVDC系统上,经由模糊逻辑控制器产生的HESS系统参考功率约为4.8 MW,而PI控制器产生的HESS系统参考功率约为4 MW。在6.5~8.5 s时刻内,4 MW的负载瞬间从舰船MVDC系统解列,虽然MVDC系统的能量有盈余,但此时HESS系统中锂电池组和超级电容器组的荷电状态已超出其安全极限值,故无法对HESS系统进行充电,则模糊逻辑控制器和PI控制器产生的HESS参考功率均为0。锂电池组和超级电容器组的总存储参考功率、电压、电流和荷电状态如图22所示。
6.2.3 模式 3(SOCbat,SC≤30%)
在该状态下,将锂电池组的初始荷电状态设定为20%,将超级电容器组的初始荷电状态设定为24.7%,经由模糊逻辑控制器和PI控制器产生的HESS存储功率如图23所示。

图18 锂电池组和超级电容器组的电压Fig.18 Voltages of lithium battery pack and super capacitor bank
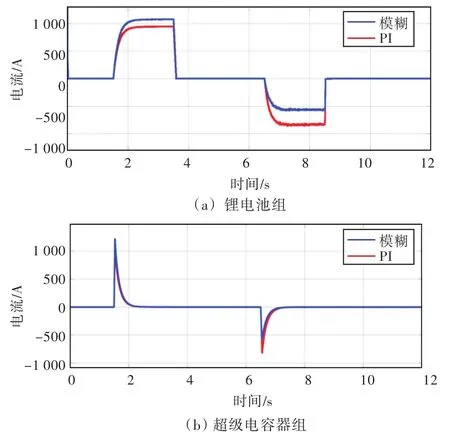
图19 锂电池组和超级电容器组的电流Fig.19 Current of lithium battery pack and supercapacitor bank
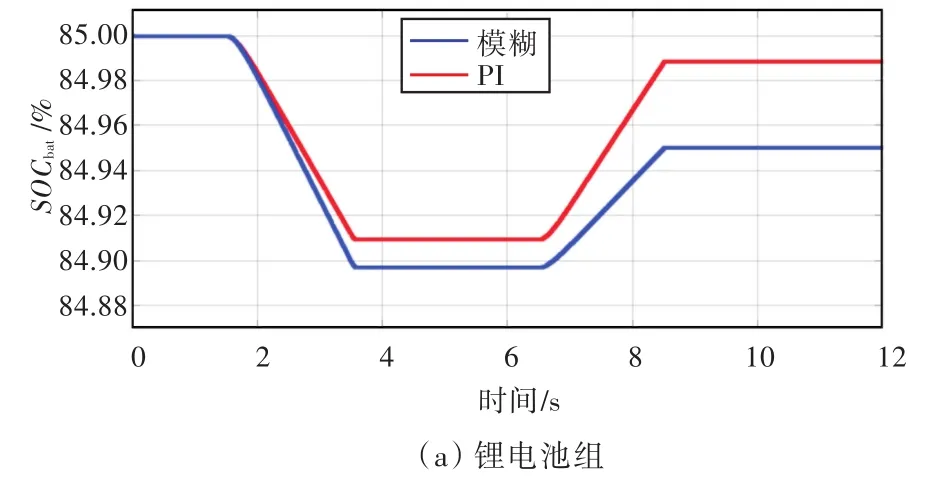
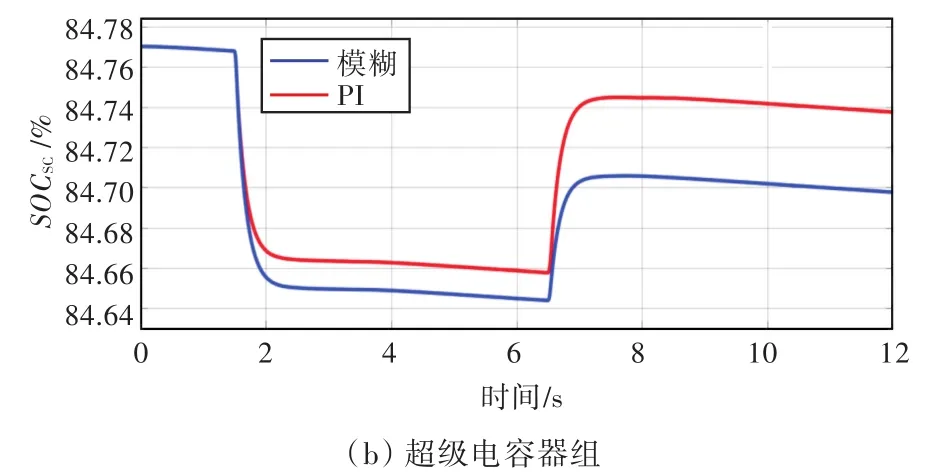
图20 锂电池组和超级电容器组的SOCbat和SOCSCFig.20 SOCbatand SOCSCof lithium battery pack and supercapacitor bank
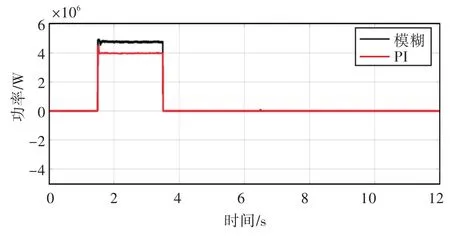
图21 HESS的总存储参考功率(模式2)Fig.21 Total storage reference power of HESS(mode 2)
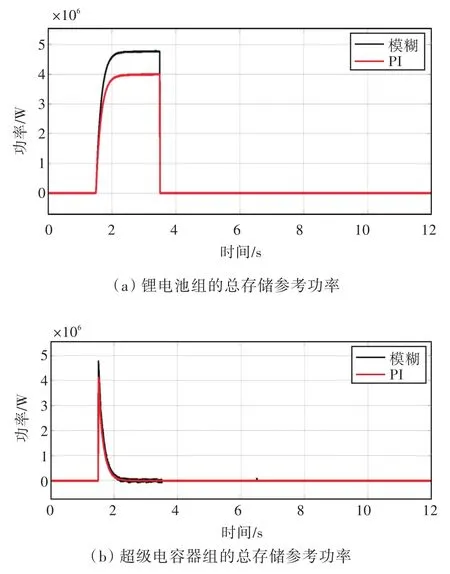
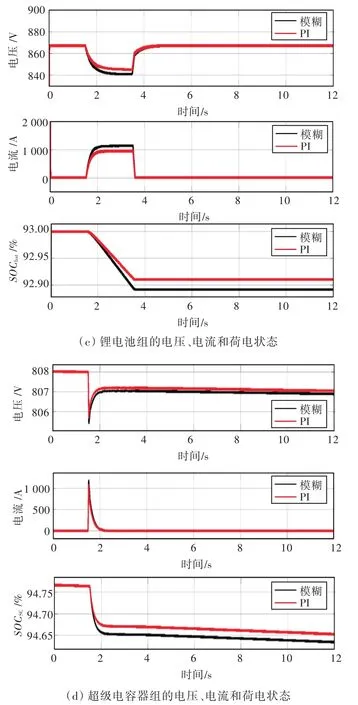
图22 锂电池组和超级电容器组的功率、电压、电流和荷电状态(模式2)Fig.22 Power,voltage,current,SOC of lithium battery pack and supercapacitor bank(mode 2)
从图23可以看出:在1.5~3.5 s时刻内,4 MW脉冲性负载突加到MVDC系统上,此时舰船总负载为44 MW,超出舰船的总发电功率(40 MW),故HESS系统应向MVDC系统输出能量。但此时锂电池组和超级电容器组的荷电状态分别为20%和24.7%,低于其30%的工作下限值,故HESS系统禁止向MVDC系统输出能量。经由模糊逻辑控制器和PI控制器产生的HESS参考存储功率均为0,此时,MVDC系统无法适应加载大功率脉冲性负载。在6.5~8.5 s时刻内,4 MW负载瞬间从舰船MVDC系统解列,经由模糊逻辑控制器和PI控制器产生的HESS参考存储功率分别约为-5 MW和-4 MW。锂电池组和超级电容器组的总存储参考功率、电压、电流和荷电状态如图24所示。
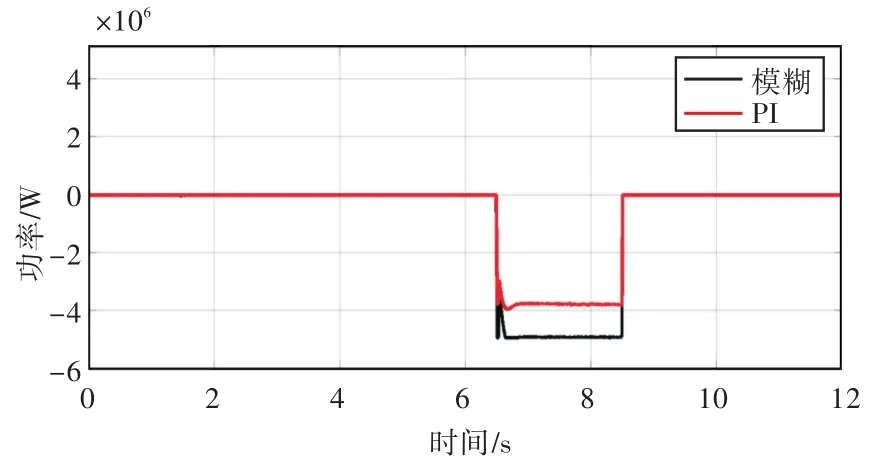
图23 HESS的总存储参考功率(模式3)Fig.23 Total storage reference power of HESS(mode 3)
3种模式下的仿真结果表明:基于ESM和LPF的PI控制器能够较为准确地预测Pstor-ref,故在对HESS系统进行充放电管理时可以避免因脉冲性负载突升/突降导致的母线电压大范围跌宕现象。模糊逻辑控制器不仅能够预测Pstor-ref,而且还能根据SOCbat和SOCSC的状态调整Pstor-ref,从而对HESS进行充放电管理。基于以上分析:基于ESM和LPF的模糊逻辑控制器优于PI控制器。
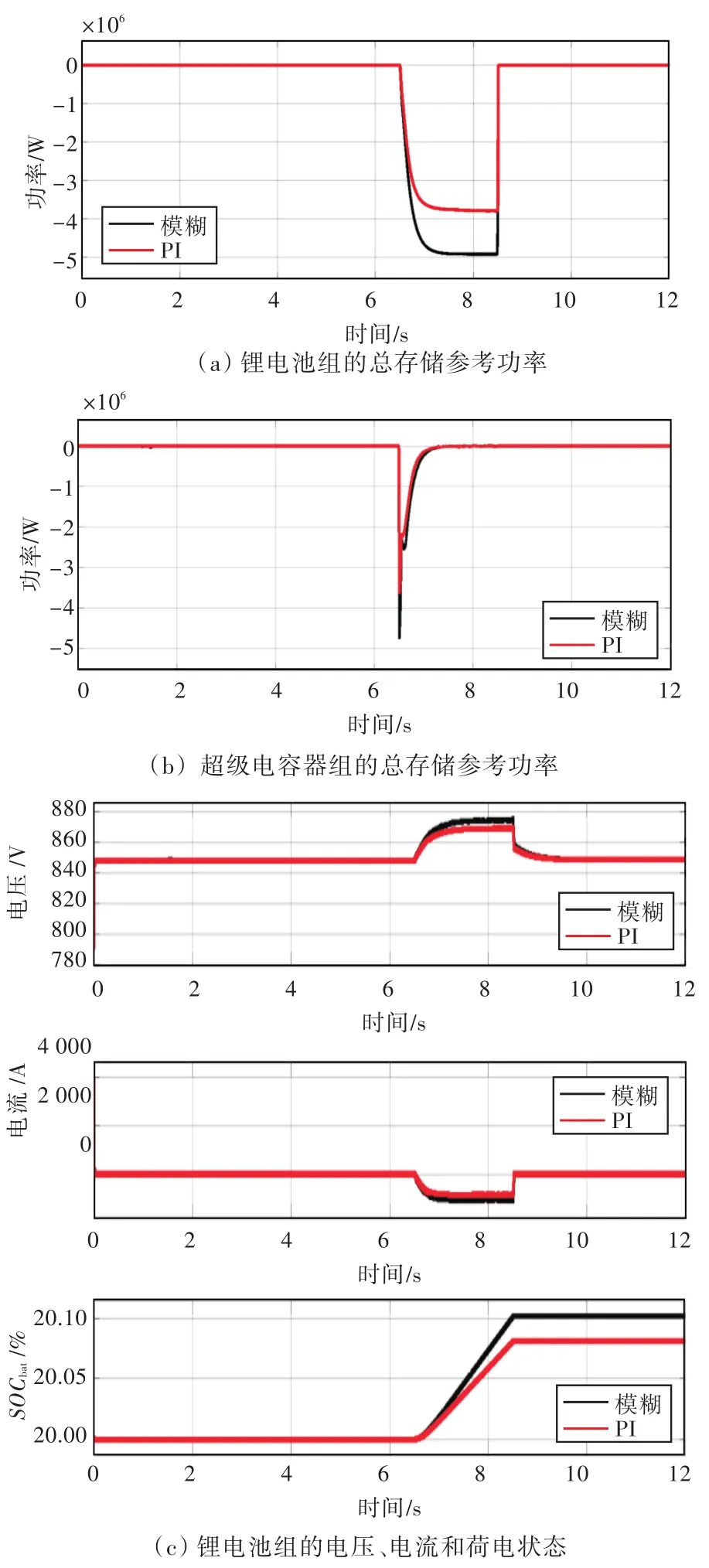

图24 锂电池组和超级电容器组的功率、电压、电流和荷电状态(模式3)Fig.24 Power,voltage,current,SOC of lithium battery packand supercapacitor bank(mode 3)
6.3 锂电池和超级电容器之间的功率分配
6.3.1 工况1
在该工况下,锂电池组和超级电容器组的初始荷电状态适中,将SOCbat和SOCSC均设定为75%,第2级模糊逻辑控制器产生的功率分配系数如图25所示。在锂电池组和超级电容器组荷电状态适中的情况下,第2级模糊逻辑控制器产生的功率分配系数为0.5。锂电池组和超级电容器组的功率分配如图26所示。在1.5~3.5 s时刻内,锂电池组和超级电容器组的参考功率为正,即处于放电状态,其分配的功率适中。在6.5~8.5 s时刻内,锂电池组和超级电容器组的参考功率为负,即处于适度充电状态。
锂电池组和超级电容器组的电压、电流和荷电状态如图27和图28所示。
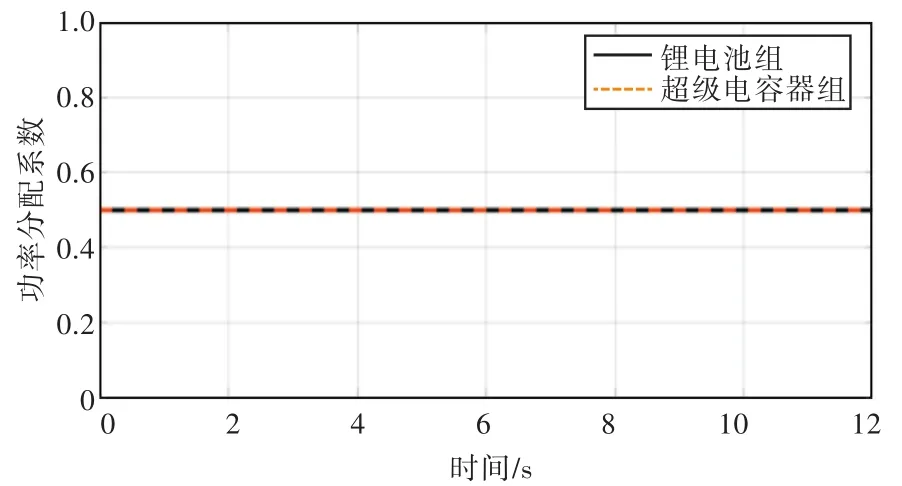
图25 锂电池组和超级电容器组的功率分配系数(工况1)Fig.25 Power distribution coefficient of lithium battery pack and super capacitor bank(condition 1)

图26 锂电池组和超级电容器组的功率分配(工况1)Fig.26 Power distribution of lithium battery pack and supercapacitor bank(condition 1)
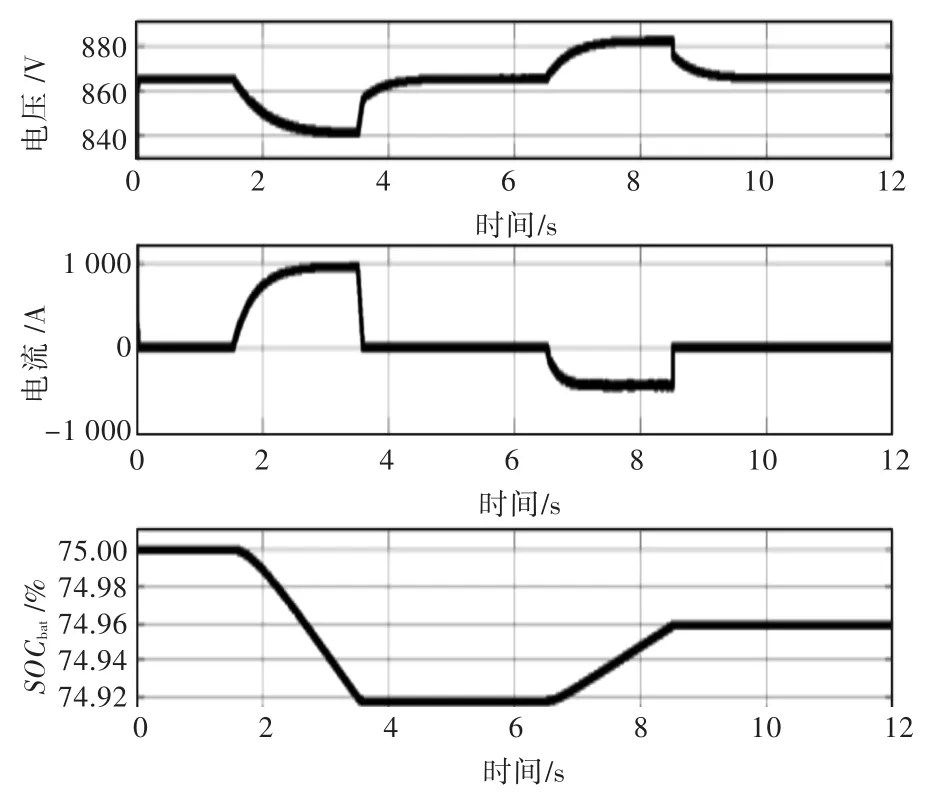
图27 锂电池组的电压、电流和荷电状态(工况1)Fig.27 Voltage,current,SOCoflithiumbatterypack(condition1)
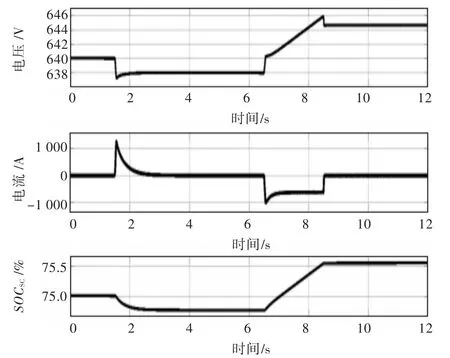
图28 超级电容器组的电压、电流和荷电状态(工况1)Fig.28 Voltage,current,SOC ofsupercapacitorbank(condition1)
6.3.2 工况2
该工况下,将锂电池组的初始荷电状态设定为35%,其值偏低;将超级电容器组的初始荷电状态设定为75%,其值适中。第2级模糊逻辑控制器产生的功率分配系数如图29所示。在1.5~3.5 s时刻内,第2级模糊逻辑控制器分配给锂电池组的功率系数约为0.3,分配给超级电容器组的约为0.7;在6.5~8.5 s时刻内,第2级模糊逻辑控制器分配给锂电池组的功率系数约为0.7,分配给超级电容器组的约为0.3。
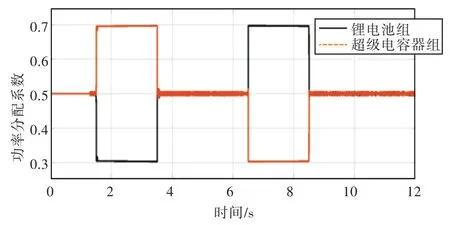
图29 锂电池组和超级电容器组的功率分配系数(工况2)Fig.29 Power distribution coefficient of lithium battery pack and supercapacitor bank(condition2)
锂电池组和超级电容器组的功率分配如图30所示。在1.5~3.5 s时刻内,锂电池组和超级电容器组处于放电状态,根据锂电池组的功率分配系数,可以通过自动增加LPF的滤波时间常数来提高超级电容器组的输出功率,从而减轻锂电池组的输出功率。在6.5~8.5 s时刻内,锂电池组和超级电容器组处于充电状态,且大部分功率分配给锂电池组以补充其能量匮乏,而少部分功率分配给超级电容器组。锂电池组和超级电容器组的电压、电流和荷电状态如图31和图32所示。

图30 锂电池组和超级电容器组的功率分配(工况2)Fig.30 Power distribution of lithium battery pack and supercapacitor bank(condition 2)
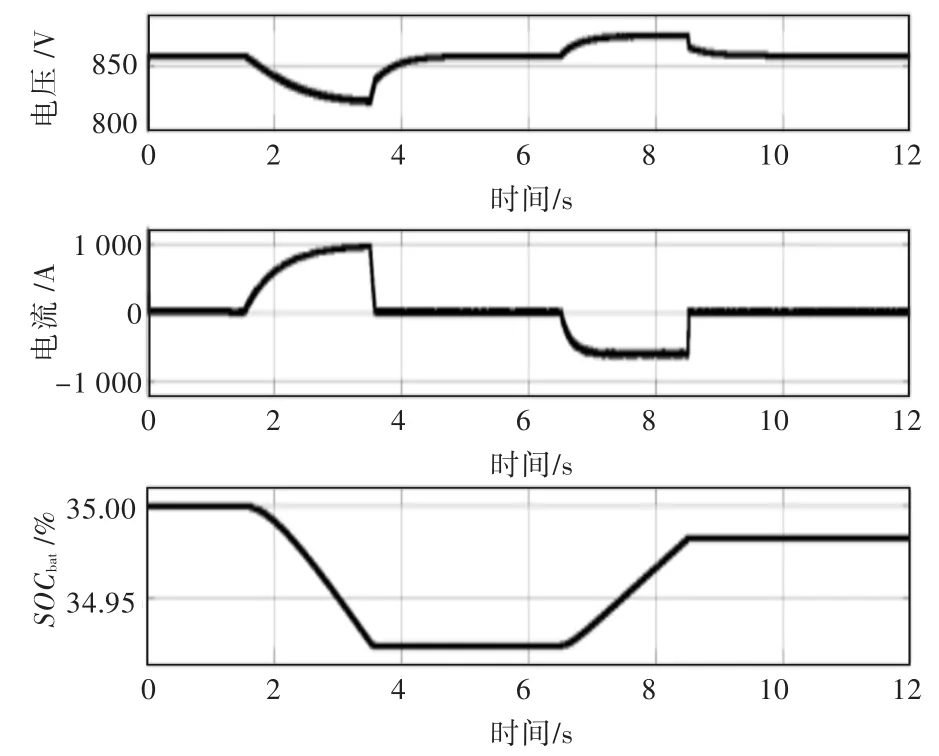
图31 锂电池组的电压,电流和荷电状态(工况2)Fig.31 Voltage,current,SOC of lithium battery pack(condition 2)
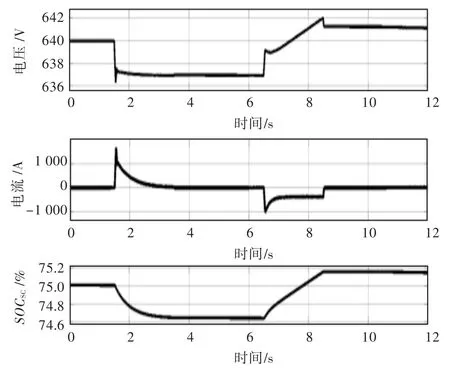
图32 超级电容器组的电压、电流和荷电状态(工况2)Fig.32 Voltage,current,SOC of supercapacitor bank(condition 2)
6.3.3 工况3
该工况下,将锂电池组的初始荷电状态设为75%,其值适中;将超级电容器组的初始荷电状态设为49%,其值偏低。第2级模糊逻辑控制器产生的功率分配系数如图33所示。在1.5~3.5 s时刻内,锂电池组的功率分配系数约0.55,超级电容器组约0.45;在6.5~8.5 s时刻内,锂电池组的功率分配系数约0.45,超级电容器组约0.55。
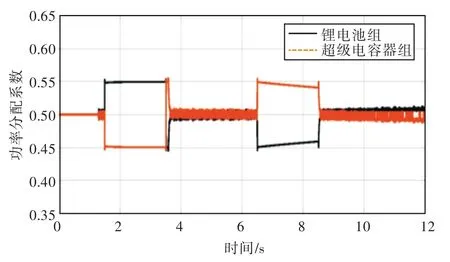
图33 锂电池组和超级电容器组的功率分配系数(工况3)Fig.33 Power distribution coefficient of lithium battery pack and supercapacitor bank(condition 3)
如图34所示,在1.5~3.5 s时刻内,锂电池组和超级电容器组处于放电状态,根据锂电池组的功率分配系数,可通过自动减小LPF的滤波时间常数来提高锂电池组的输出功率,从而减轻超级电容器组的输出功率。在6.5~8.5 s时刻内,锂电池组和超级电容器组处于充电状态,且大部分功率分配给超级电容器组以补充其能量匮乏,而少部分功率分配给锂电池组。值得注意的是,由于第1级控制器功率预测的初始跟踪抖动,在图34中的1.5 s时刻存在超级电容器组的功率震荡现象。
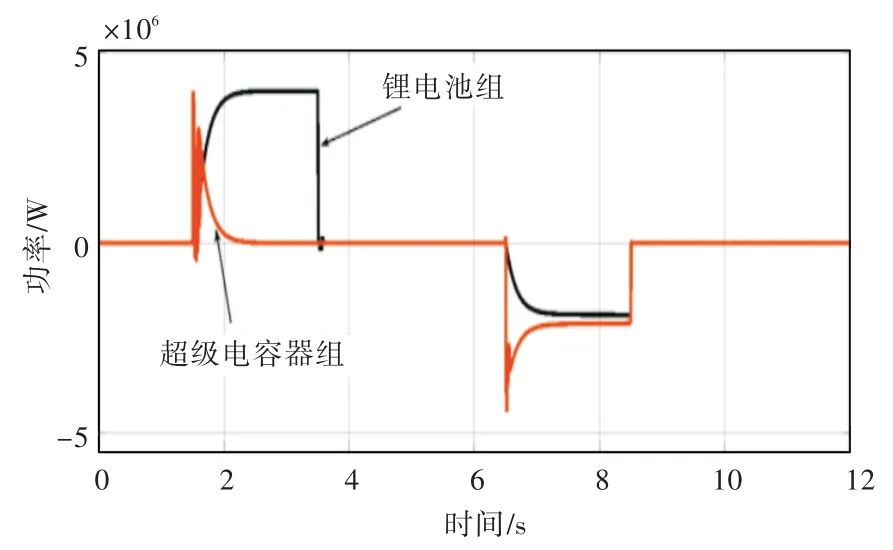
图34 锂电池组和超级电容器组的功率分配(工况3)Fig.34 Power distribution of lithium battery pack and supercapacitor bank(condition 3)
锂电池组和超级电容器组电压、电流和荷电状态如图35和图36所示。
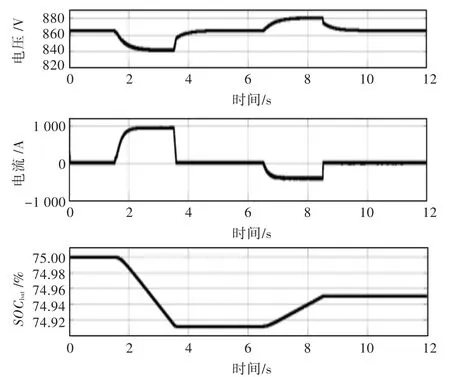
图35 锂电池组的电压、电流和荷电状态(工况3)Fig.35 Voltage,current,SOC of lithium battery pack(condition 3)
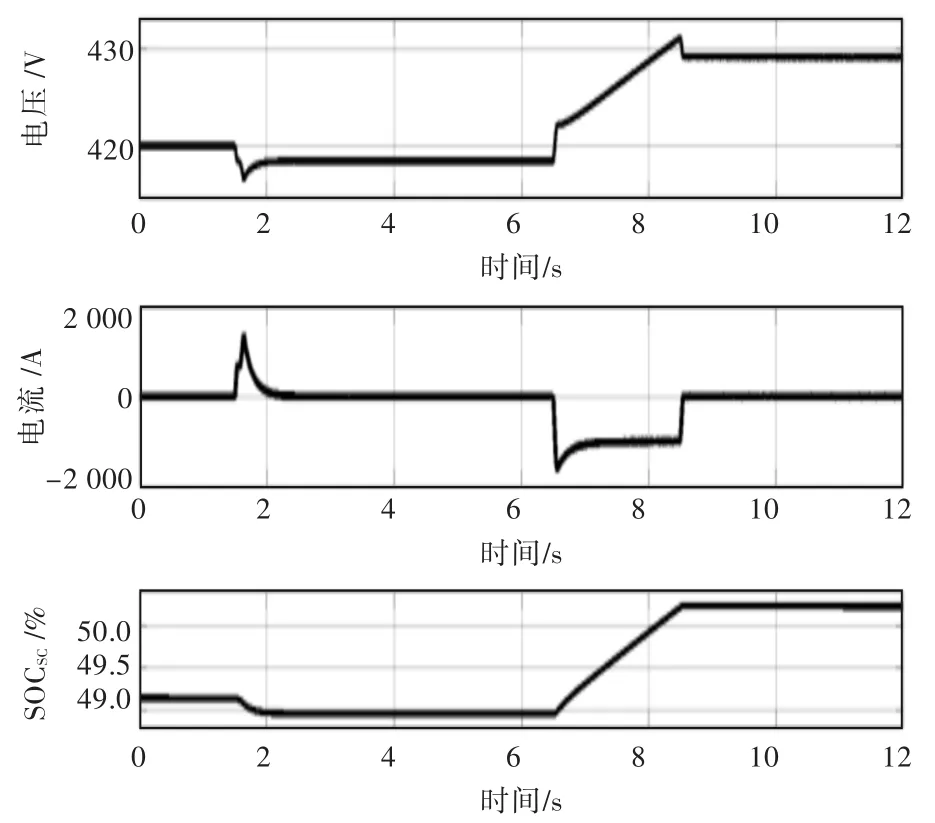
图36 超级电容器组的电压、电流和荷电状态(工况3)Fig.36 Voltage,current,SOC of supercapacitor bank(condition 3)
7 结 论
本文针对基于ESM和LPF的PI控制器和模糊逻辑控制器进行了仿真分析,得到如下结论:
1)模糊逻辑控制器的性能优于PI控制器,通过对HESS进行能量管理,可以平滑地抑制MVDC系统母线电压的大范围跌宕现象,从而提高舰船MVDC电力系统的稳定性和生存能力。
2)针对锂电池组与超级电容器组之间能量不平衡的问题,可以利用第2级模糊逻辑控制器来合理分配二者的功率,从而提高能量利用效率。
后续将在舰船不同负载的运行状态下,开展混合能量系统的优化管理,进一步提高系统的综合效率。
猜你喜欢
物理之友(2020年12期)2020-07-16 05:39:20
电子制作(2019年22期)2020-01-14 03:16:28
山东冶金(2019年5期)2019-11-16 09:09:38
测控技术(2018年11期)2018-12-07 05:49:38
电源技术(2017年1期)2017-03-20 13:37:58
通信电源技术(2016年6期)2016-04-20 06:21:10
电源技术(2016年2期)2016-02-27 09:04:52
电源技术(2015年7期)2015-08-22 08:48:22
电测与仪表(2014年24期)2014-04-09 11:35:56
电源技术(2014年9期)2014-02-27 09:03:22
