适用于地质灾害调查的微型无人机航线控制系统设计与实现
2019-04-19 09:31张鸣之薛跃明石爱军
水文地质工程地质 2019年2期
马 娟,张鸣之,冯 振,黄 喆,薛跃明,石爱军,邵 海
(中国地质环境监测院,北京 100081)
我国是地质环境脆弱、地质灾害多发的国家之一,滑坡、崩塌、泥石流、地面塌陷等地质灾害易发区面积约占国土面积的65%。国土资源部从1999年开始,在地质灾害严重的县(市),陆续部署开展了县市地质灾害调查与区划工作[1],截至2017年,完成1 502个县(市、区)的1∶5万地质灾害详细调查和29 942处隐患点的勘查。我国共查明地质灾害287 916处,其中,滑坡142 377处,崩塌68 419处,泥石流33 524处,地面塌陷、地裂缝、地面沉降等43 596处[2]。传统的地质灾害野外调查手段是使用罗盘、地质锤等工具,基于纸质地形图进行野外数据采集,然后室内整理手工编录等[3-5],这种工作方式已经不能满足日益增长的快速获取信息的需求,以及国家精细化地质调查的要求,地质灾害调查的精度、广度、深度有待于进一步提高。随着信息技术的发展,掌上机、无人机、InSAR、高精度遥感等技术在地质灾害领域已有了不同程度的应用[6-8],但也存在一些问题。以无人机遥感技术为例:一是地质灾害调查人员通常为地质专业出身,学习无人机操控技术难度较大;二是市场无人机操作培训价格高,难以在地质调查队伍中普及;三是无人机设备搭载多镜头倾斜相机的价格较高,难以在野外地质调查小组中形成标配推广。因此亟需设计研发一套适用于我国地质灾害野外调查的无人机遥感调查技术方法。
笔者所在的团队通过长期跟踪地质调查队伍,开发出一套地质灾害调查微型无人机航线控制系统,用于解决无人机技术在地质灾害调查中运用的普适性问题。系统基于市面现有成型微型无人机硬件技术,通过开发适用于地质灾害调查无人机航线规划及拍摄模式,使用无人机快速、及时获取地质灾害隐患点影像数据。通过数据处理软件,生成地质灾害隐患点及其周围环境的正射影像数据、数字高程数据以及三维模型等,有利于地质灾害调查人员获取地质灾害隐患点及其周边精准数据。
1 地质灾害调查无人机数据采集流程
根据无人机数字航空摄影测量与遥感外业技术规范要求,地质灾害调查无人机数据采集流程[9-10]见图1。

图1 无人机数据采集流程Fig.1 Process of UAV data acquisition
资料收集:收集工作区地形图、前期遥感影像及解译图和区域基本资料等,主要目的是为了解地质灾害调查区域相对高差数据、周边环境概况,以确保采集作业安全。如果调查区域缺乏以上资料,建议第二步现场踏勘时手动飞行至调查区域上空进行概况调查。
现场踏勘:依据收集的资料确定无人机起降场地及地面控制人员安全有效的控制位置,预规划航线同时进行GPS信号检测。
航线规划:按照实际需要的地面分辨率进行设计,根据无人机的性能参数以及地质灾害调查区域的地形特征进行航线规划,航线能完整覆盖整个航拍区域。
飞行作业:飞机组装,检查飞机状态指标,按既定航线规划进行飞行作业。
控制点测量:根据测区实际状况和航线规划情况进行控制点布设及测量。
影像下载:连接无人机的储存设备到电脑,导出影像数据。
质量检查:对获取的测区影像进行质量检查,确定影像质量是否有云、雾、雪,是否有变形、扭曲、发虚等现象,判断是否需要补飞或重飞。
外业成果:经影像质量检查无误后形成的无人机数据采集结果。
2 微型无人机航线控制系统设计及实现
2.1 系统架构设计
面向地质灾害调查业务需求以及地质灾害无人机数据采集流程,设计微型无人机航线控制系统的总体架构(图2),总体上包括支撑层、通信层、数据层、应用层以及UI层。系统基于无人机飞行器、遥控器以及移动设备等支撑层,通过通信手段,采集地质灾害区域的影像数据;基于数据库提供的同一数据模型和数据服务,构建微型无人机航线控制系统应用模块;通过UI层实现各个应用模块的集成应用,为地质灾害调查用户提供微型无人机航线控制服务。

图2 系统总体架构Fig.2 Diagram of the system framework
(1)支撑层
微型无人机航线控制系统支撑层主要包括无人机飞行器、遥控器、移动设备等硬件支撑设备。
(2)通信层
微型无人机航线控制系统通信层主要包括无人机飞行器、遥控器、移动设备、服务器之间的相互通信方式。其中,移动设备与遥控器通过USB通信协议连接,遥控器与飞行器通过无线电通信连接,移动设备与服务器通过网络通信连接。通过多种通信方式,实现了地质灾害数据在多平台之间的传输。
(3)数据层
无人机地质灾害调查数据库面向地质灾害调查业务应用的建设需求,构建统一的数据存储、管理、应用和服务平台,兼容多源、多尺度海量数据,实现各类地质灾害调查业务数据的一体化存储、管理和服务。
(4)应用层
业务应用层构建于无人机地质灾害调查数据库之上,提供面向地质灾害调查业务应用、管理的一体化信息服务。业务应用主要功能包括:起飞条件检查功能、飞行任务管理功能、航线规划功能、任务模式功能、智能续飞功能、图像快拼功能以及离线地图功能等。
(5)UI层
UI层通过数据集成、业务集成和成果集成,实现各个应用模块的集成应用,为用户提供微型无人机航线控制服务。
2.2 系统开发
微型无人机航线控制系统以手机或者平板电脑为终端,以Android Studio2.1.2和JDK1.8.0为开发平台,使用SQLite和MongoDB数据库,Java语言进行开发,运行环境Android4.4以上。

图3 系统界面设计图Fig.3 Design of the system interface
2.3 系统功能实现
2.3.1起飞条件检查
全面自动检查无人机起飞条件,包括无人机与地面站(即微型无人机航线控制系统)连接是否正常、无人机电量是否充足(不低于30%)、GPS卫星数是否足够(卫星数不小于6)、内存卡是否正常插入、航线是否绘制、设备是否已激活,只有当起飞条件都满足时,才能一键起飞并执行后续的任务。

图4 起飞检查界面Fig.4 Interface of take-off check
2.3.2飞行任务管理
飞行任务管理分为已完成任务管理和未完成任务管理两类。已完成任务指已经完成的飞行任务;未完成任务指已规划完航线,但尚未进行飞行的任务。用户可以进行飞行任务查看、命名、删除以及数据下载和上传等操作。数据下载指的是自动从无人机端下载无人机影像数据到手机端或平板电脑端,数据上传指的是自动将已下载的无人机影像数据上传到后方无人机数据处理平台。
2.3.3航线规划
航线规划主要指设置航线参数,包括飞行高度、飞行速度(分为高、中、低三档)、旁向(航向)重叠率(分为高、中、低三档)、航线框类型等。在地理底图上通过手势拉框圈定范围,通过飞行高度、数据重叠率、飞行区域、飞行速度等参数,自动计算生成无人机飞行航线及拍摄点(航线上灰色点即为拍摄点)。

图5 航线规划界面Fig.5 Route planning interface
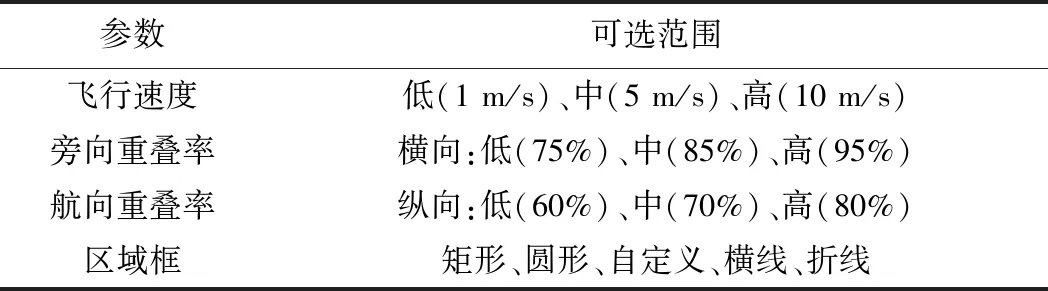
参数可选范围飞行速度低(1 m/s)、中(5 m/s)、高(10 m/s)旁向重叠率横向:低(75%)、中(85%)、高(95%)航向重叠率纵向:低(60%)、中(70%)、高(80%)区域框矩形、圆形、自定义、横线、折线
2.3.4任务模式
根据《滑坡崩塌泥石流灾害调查规范(1∶50 000)》,滑坡、崩塌、泥石流等地质灾害点需调查其分布范围、规模、结构特征等。针对此要求,开发了任务模式。任务模式是本系统的核心功能,通过算法控制无人机自动旋转机身以及自动调节镜头角度,实现单个镜头模拟多镜头倾斜相机拍摄效果,准确获取地质灾害及其发育环境要素信息,后期计算并生成地质灾害三维模型,从而确定滑坡、崩塌、泥石流和不稳定斜坡的类型、规模及空间分布特征。任务模式共开发了4种适用于地质灾害调查的数据采集方法:倾斜模式、正视模式、快速正射模式和全景模式。
倾斜模式适合坡度小于45°的斜坡,镜头垂直于水平面,通过旋转机身及照相机镜头角度,每个拍摄点从1个垂直、2个倾斜3个角度拍摄3张照片:首先镜头垂直向下拍摄1张;接着机身顺时针旋转90°,镜头上仰45°拍摄1张;保持仰角不变,机身继续顺时针旋转180°拍摄1张。
正视模式适合坡度大于45°的陡坡,镜头平行于水平面,通过旋转机身及照相机镜头角度,每个拍摄点也从3个角度拍摄3张照片:首先镜头水平正对拍摄地物拍摄1张;然后机身逆时针旋转45°拍摄1张;再顺时针旋转90°拍摄1张。
快速正射模式适用于地质灾害应急调查,通过控制相机的曝光时间,镜头垂直于水平面定时拍照,实现无人机在执行航线飞行过程中不悬停拍照,极大缩短了调查时间。
全景模式适合地质灾害点周围概况调查,飞机飞到指定点上空,镜头分别呈水平方向、斜向下与水平面夹角35°、斜向下与水平面夹角70°,机身旋转360°,转3圈,每45°拍摄1张,最后镜头垂直向下拍摄1张,共拍照25张。
如遇陡缓结合型,比如后缘残留危岩体与前缘崩滑(塌)堆积体构成的灾害体,联合正视模式、快速正射模式两种模式进行拍摄,陡崖部分使用正视模式拍摄,斜坡崩塌堆积体使用倾斜模式拍摄,拍摄完成后进行联合建模(图6)。
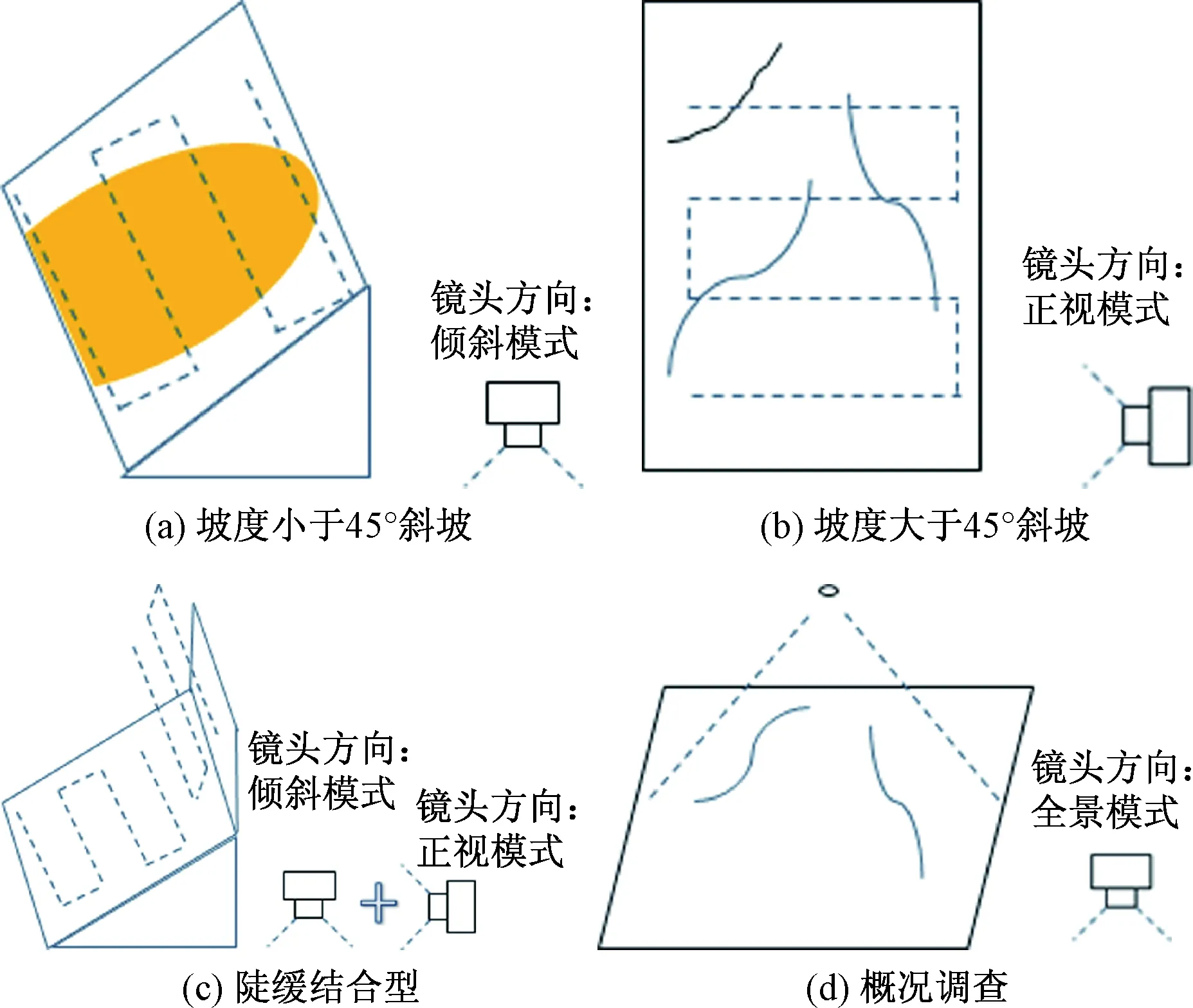
图6 不同地形任务模式示例Fig.6 Examples of different terrain mission modes
2.3.5智能续飞
针对微型无人机供电电池容量小、飞行时间短的问题,微型无人机航线控制系统提供智能续飞功能:后一架次的起点自动设为航线未完成部分的第一个点,依此类推,从而满足较大区域连续拍摄需求。
2.3.6图像快拼
当任务模式为快速正射模式时,数据采集任务完成后,APP端通过遥控器与无人机连接全自动下载该任务所有拍摄照片,并对下载照片进行自动拼接,快速获得现场正射影像图。

图7 图像快拼示意图Fig.7 Diagram of image quick spelling
2.3.7离线地图
离线地图下载可以框选所需调查区域进行地图下载,分为正在下载和已完成两类,可实时显示下载进度。用户可对地图下载任务进行暂停、继续、删除、查看等操作。
3 研究区试验
3.1 试验对象
试验对象选择伊宁县喀拉亚尕奇乡潘津村皮里青河3号滑坡。实地调查发现该点位于皮里青河主沟右岸斜坡,属山前黄土丘陵,坡体裸露,植被覆盖率低其剖面形态呈凹形,平面呈不规则,坡度约40°。斜坡地表出露第四系风积黄土(Qeol),土体内部垂直节理裂隙较发育,下伏石炭系伊什基里克组砂砾岩(C2y)。斜坡坡脚为河流阶地,主河道距离坡址约55 m。滑坡滑动地层为黄土,滑体厚约12 m,滑动后在坡脚堆积。
3.2 试验方案
本试验使用大疆公司的精3专业版(Phantom-3-Pro)无人机,其具有重量轻、成本低、灵活、便携、快速等优势。实地踏勘该滑坡后,认为该滑坡地形使用倾斜摄影任务模式较为适合,规划航线后,使用续飞功能飞行2个架次,完成该滑坡无人机调查,共取得照片84张,设置飞行高度260 m,飞行速度高,旁向重叠率中,航向重叠率中。
3.3 试验结果
飞行获得的数据通过上传自主研发的iFlyCloud无人机三维数据处理云平台(http://fly.cigem.cn),生成正射影像图、三维模型以及数字表面模型等一系列数据产品。从生成的数据产品质量可以看出,微型无人机航线控制系统所采用的数据采集方法完全可行。
图8为制作生成的皮里青河3号滑坡三维模型,从图中可以明显划分滑坡的滑源区、滑动区、洒落区以及堆积区,同时可通过高程变化判别出滑坡的滑动方向。通过自主开发iFlyCloudViewer三维模型浏览软件可快速测量出整个滑坡的宽度67 m,长度340 m,面积2.2×104m2,体积117.8×104m3,坡度为40°。滑坡堆积体延伸至主河道中间,前缘被河流冲刷侵蚀形成深约5.2 m的陡坎。滑坡后缘可见明显的陡坎和拉张裂缝,陡坎高2~3 m,大型拉张裂缝约有4条,最长的达到65 m。滑坡堆积体松散,后缘陡坎形成新的临空面,在降雨、冰雪融水,河流冲刷等作用下,易发生局部滑动,滑坡范围将向山顶进一步扩展。

图8 三维立体解译(摄于2017年7月19日)Fig.8 3-D interpretation(taken on July 19, 2017)
4 结论
目前,微型无人机的硬件技术已经成熟,但缺乏自动控制微型无人机对地质灾害调查进行数据采集的航线控制系统软件。本项目基于Android系统设计了适用于地质灾害野外调查微型无人机航线控制系统,以微型无人机为调查工具,实现了地质灾害野外数据采集流程全自动化,极大降低了地质灾害调查人员的工作强度,提高了地质灾害调查数据采集的效率。
此系统能够广泛运用于地质灾害日常调查以及突发性地质灾害的应急调查中,特别是4种无人机遥感数据采集任务模式能够快速科学规划航线以适应斜坡、陡坡、陡缓结合型等不同地形需求,采集获取地质灾害及其发育环境要素遥感影像数据。通过三维建模软件平台计算,生成二、三维数据产品,在产品的基础上,通过遥感信息提取技术与地质灾害分析相结合,提供研究地质灾害调查点的基础数据,对提高地质灾害调查的精度有着重要意义。
致谢:武汉地大信息工程有限公司提供了相关材料和技术实现,在此表示感谢!
猜你喜欢
河北地质(2021年1期)2021-07-21
小哥白尼(神奇星球)(2021年12期)2021-03-08
中国公路(2017年18期)2018-01-23
北方交通(2016年12期)2017-01-15
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
山东青年(2016年3期)2016-02-28