
基于断层正则化的网格层析反演在深度域速度场建模中的应用❋
2019-04-16 06:41王新领张健男
中国海洋大学学报(自然科学版) 2019年6期
王新领, 张健男, 赵 明, 赵 波
(1.中海油服物探事业部特普公司,广东 湛江524057; 2.中国海洋大学海洋地球科学学院, 山东 青岛 266100;3.中国海洋大学海底科学与探测技术教育部重点实验室, 山东 青岛 266100)
地震层析反演是利用地震波走时误差沿射线路径反投影的方式来估计地下模型速度扰动,从而实现速度模型重构的速度反演方法。走时层析反演在偏移速度建模和静校正计算中被广泛应用[1-2],但是层析反演利用走时误差沿射线路径反投影的方式来估计速度扰动存在多解性,受多种因素的影响,有时不收敛或难以准确求解速度场[3-5]。近年来,国内外地质地球物理方法研究人员根据各种地球物理方法求解速度的特性,进行了深入的探索,提出了在层析反演计算中加入先验约束条件,用来减少反演多解性的方法[6-8]。李振伟等[9]提出了基于立体层析反演的偏移速度建模方法;宋桂桥等[10]提出了用非线性初至波层析反演静校正替代小折射和微测井技术加大低速带探测深度的方法;李庆春等[11]提出了初至波与反射波旅行时多尺度渐进联合层析成像方法;王孝等[12]提出了多信息约束初至波层析反演近地表速度模型的方法。Zhou等[13]、Zhou[14]和Zdraveva等[15]把光滑算子加入灵敏度核函数中对反演的模型直接进行正则化约束;Clapp[16]和Clapp等[17]利用预条件思想实现对反演模型的预条件约束。
深度域速度场反演的精度直接影响着深度域成像的效果,也影响着后续解释工作和圈闭评价。目前常规深度域建模方法主要采用网格层析成像处理迭代修正速度,但网格层析方法只能获得平滑速度场,在岩性和构造变化较大位置,如碳酸盐岩,火成岩,复杂断块区域,网格层析方法无法精确描述该区域的速度特征,导致对应的深度域成像结果不能准确描述其构造形态和准确位置。本文实现了基于断层和层位约束的网格层析成像,其可在网格层析速度反演时,使其速度更新平滑不跨越速度突变界面的位置。模型和实际数据反演效果表明,该方法可以显著提高速度反演精度,保持速度突变位置两侧的速度真实变化,有效解决了常规层析成像技术对速度突变位置处速度刻画不精确的问题。
1 旅行时层析反演原理
走时层析成像的数学表达为沿射线路径的拉东变换,即利用走时误差沿射线路径反投影的方式来估计慢度扰动,从而实现图像函数的重构,这里的图像函数即为慢度场。在给定初始慢度模型之后,利用有限差分方法求解程函方程,实现射线追踪和旅行时间计算[18]。正演得到的旅行时间与实际初至时间的差可以表示为:
(1)
式中:Δd(s,d)是从炮点s到检波点d的旅行时残差;Δm(x,y,z)是三维空间坐标为(x,y,z)处的剩余慢度;G(s,d)是从炮点s到检波点d的射线路径。将(1)式慢度模型离散化,则:
(2)
式中Δgi表示第i个网格空间内的射线距离。所有炮检点射线残差形成一个稀疏线性方程组:
Δd=GΔm。
(3)
这样,射线层析反演过程就从一个非线性关系变成了线性问题。由于实际矩阵规模较大,一般采用迭代法解这个线性方程组。对于实际资料而言,G是一个病态的大型稀疏矩阵,反演求解存在很强的不适定性,为满足稳定性,一般只能够选取光滑解。
2 基于断层正则化的网格层析反演
正则化技术是获得有地质意义解的有效方法,一般可分为模型正则化、预条件模型正则化、数据正则化三种[13]。利用地下构造信息约束模型参数的空间分布特征把模型参数在空间中的相关特征通过构造信息提取出来,结合Tikhonov模型正则化或预条件思想把此信息加入层析反演中可显著改善估计的模型参数[19],称之为模型正则化;Clapp等利用预条件思想实现对反演模型的预条件约束,称为预条件模型正则化[16];层析中加入数据关联性和突出高质量的数据称为数据正则化[14]。数据正则化考虑了数据参数之间的关联性以及不同的数据质量,数据正则化的作用是以牺牲收敛效率为代价保证正确收敛,收敛效果差;预条件正则化方式收敛性又优于模型约束的Tikhonov正则化,且计算效率较高。所以本文采用预条件正则化方法来应用断层和层位信息约束层析反演,以保持速度突变位置两侧的速度真实变化。
预条件矩阵可采用如下方式定义:
Δm=Su。
(4)
式中:S表示人工定义断层或层位的预条件算子,这里设计为一个和层位相关的去噪算子;u表示我们期望的预条件解;
将公式(4)带入公式(3)有:
GSu=Δd。
(5)
先求解方程(3) 将求解结果代入公式(4)即可得到最终的解Δm。
如何构建断层约束的预条件矩阵是预条件正则化的关键点之一,预条件矩阵设定为和断层相关的光滑矩阵。这里采用双边滤波器[20]施加断层预条件,双边滤波器是图像处理中一种常用的非线性滤波器。主要思想是抑制与中心像素值差别太大的像素(断层附近的速度差异大),输出像素值依赖于邻域像素值的加权和(高斯平滑核函数)[21]。
(6)
(7)
(8)
在图像的平坦区域(无断层区域),空间相关的各个网格点的权重为一,高斯平滑起主要作用。在图像的边缘区域(断层区域),根据断层设定网格点权重,断层起了滤波截断效应,保持了断层两边的速度不会互相干扰(见图1)。
3 模型实验
本文设计了一个含断层的二维模型验证断层控制层析方法的有效性。断层模型见图2(a),对应速度场见图2(b)。该模型长16 625 m,深度为7 000 m,以12.5 m的网格间距,应用主频为30 Hz的Ricker子波作为震源函数,基于声波方程有限差分正演方法模拟一套地震数据作为测试数据。其中炮点深度0 m,检波点深度也为0 m,炮点间距50 m,检波点间距25 m,共计800炮。
基于平滑后的偏移速度见图3(a)进行偏移,偏移剖面见图4(a),成像道集见图5(a)。由图4(a)、5(a)可知,成像剖面上断层扭曲较为剧烈,断面归位较差,断层下方的地层杂乱信噪比较差;断层附近的成像道集同相轴有扭曲甚至截断现象,不同偏移距的剩余曲率有区别甚至相反。

((a)待平滑数据;(b)基于图像边缘构建双边滤波器;(c)在对(a)进行双边滤波器滤波的数据。

((a)二维模型剖面;(b)模型对应的速度场。(a)2-D model section;(b)Velocity field corresponding to the model.)
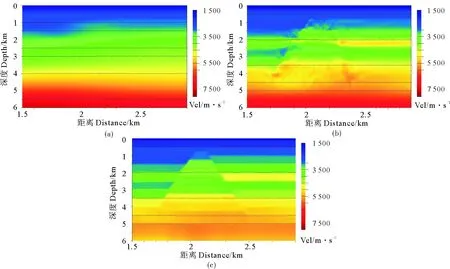
((a)深度偏移初始速度;(b)网格层析更新4次后的速度;(c)在b基础上用断层预条件更新5次后的速度。(a)Initial velocity of depth migration;(b)The speed of grid tomographic after updating 4 times;(c)The speed is updated 5 times using faults precondition on the basis of (b).)
图3 初始速度、网格层析速度及断层预条件更新速度对比
Fig.3 Comparison of initial velocity,grid tomographic updated velocity and fault precondition constraint updated velocity
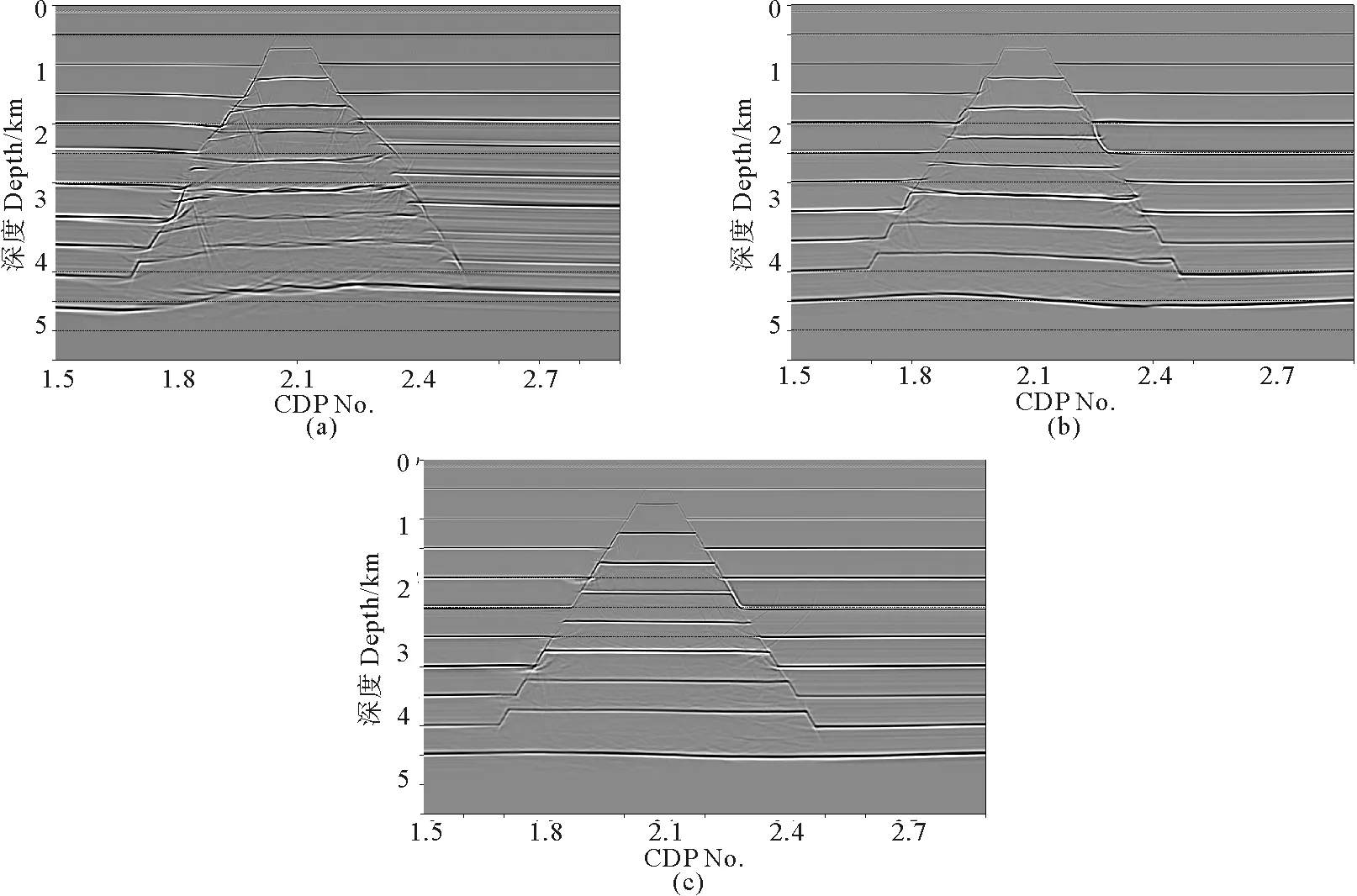
((a)初始速度模型成像剖面;(b)采用网格层析成像更新4次后成像剖面;(c)在b基础上用断层预条件更新5次后的成像剖面。(a)Initial velocity PSDM section;(b)The PSDM section of grid tomographic after updating 4 times;(c)The PSDM section is updated 5 times using faults precondition on the basis of (b).)
图4 初始速度深度偏移剖面、网格层析速度深度偏移剖面及断层预条件更新速度深度偏移剖面对比
Fig.4 Comparison of initial velocity PSDM section,grid tomographic velocity PSDM section and fault precondition constraint updated velocity PSDM section

((a)初始速度模型道集;(b)采用网格层析成像更新4次后道集;(c)在b基础上用断层预条件更新5次后道集。(a)Initial velocity PSDM gathers;(b)The PSDM gathers of grid tomographic after updating 4 times;(c)The PSDM gathers is updated 5 times using faults precondition on the basis of (b).)
图5 初始速度深度偏移道集、网格层析速度深度偏移道集及断层预条件更新速度深度偏移道集对比
Fig.5 Comparison of initial velocity PSDM gathers ,grid tomographic velocity PSDM gathers and fault precondition constraint updated velocity PSDM gathers
以平滑后的偏移速度作为初始速度模型,进行常规网格层析反演,更新4次后获得速度模型见图3(b),偏移剖面见图4(b),成像道集见图5(b)。由图4(b)、图5(b)可知,成像剖面上断层扭曲现象减弱,归位有改善,断层附近的信噪比较好,但是断层正下方的同相轴归位不是很好。基底形态受断层影响出现扭曲。成像道集的信噪比有改观,但是有高频扭动,推测是平滑的速度场旅行时不够精确。
在常规网格层析方法得到的速度基础上利用断层预条件方法进行反演,更新5次后得到的速度场见图3(c),偏移剖面见图4(c),成像道集见图5(c)。由图4(c)、5(c)可知,成像道集同相轴基本校平,成像剖面上断层归位较好,断层两边的形态得到了精确成像。
4 实际数据断层正则化网格层析反演
本文选取南海东部某工区进行层析成像测试。该工区位于东沙隆起,深层存在大区域的碳酸盐岩层系,浅层断裂系统大量发育,断裂结构复杂,受断层阴影影响,断层下部地层成像模糊。

((a)常规层析速度场;(b)基于a速度场的成像剖面;(c)基于断层约束层析的速度场;(d)基于c速度场的成像剖面。(a)Conventional tomographic velocity field;(b)Imaging profile based on velocity field (a)(c)Velocity field based on faults constraint tomography;(d)Imaging profile based on velocity field (c).)
图6 南海东部某工区网格层析速度深度偏移成像及断层约束层析速度深度偏移成像对比
Fig.6 Comparison of grid tomographic velocity updated velocity PSDM and faults constraint tomography updated velocity PSDM in a eastern working area of south china sea
图6(a)为常规层析得到的平滑速度模型,断层上下盘两侧速度变化小,过度平稳,图6(b)在大断层附近受断层两边速度差异影响,出现了扭曲现象。图6(c)为断层约束层析得到的速度场,由于层析反演受到断层控制,当速度的分辨率提高后,断层上下盘两侧速度变化明显,断面位置速度与实际地质情况更吻合,因此基于断层约束层析的偏移剖面(见图6(d))中断层下部的结构成像更为合理。
5 结语
本文基于预条件正则化理论,利用断层、层位预条件正则化技术改进现有层析技术,实现了基于断层和层位约束的网格层析成像,其可在网格层析速度反演时,使其速度更新平滑不跨越速度突变界面的位置,使得速度结构地质意义更合理,横向分辨率更高,最终获得速度场深度域成像更好。模型和实际数据反演效果表明该方法可以显著提高速度反演精度,保持速度突变位置两侧的速度真实变化,有效解决了常规层析成像技术对速度突变位置处速度刻画不精确的问题,有利于后续解释工作的开展。
猜你喜欢
贵州师范大学学报(自然科学版)(2022年5期)2022-11-18
中国科技纵横(2022年17期)2022-10-25
物探与化探(2022年4期)2022-08-26
土壤学报(2022年1期)2022-03-08
发明与创新(2022年1期)2022-02-20
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
上海师范大学学报·自然科学版(2018年3期)2018-05-14
商品与质量(2018年38期)2018-04-16
北京航空航天大学学报(2016年6期)2016-11-16
