旋转惯导的发展及应用
2019-04-13 06:51:22姬晓琴陈文辉
航天控制 2019年1期
姬晓琴 陈文辉 杨 业
1. 宇航智能控制技术国家级重点实验室,北京100854 2. 北京航天自动控制研究所,北京100854
惯性导航系统(简称惯导系统)利用陀螺仪和加速度计测量载体的角运动和线运动,并通过实时解算获得载体的姿态、速度和位置信息。惯导系统有平台式和捷联式2类实现方案。由于惯性导航是一种完全自主的导航方式,在军、民领域应用极为广泛。惯导系统是现代各类载体GNC系统的核心设备,其精度的高低制约着整个载体精度和性能的提高。因此,提高惯导系统的精度始终是惯性导航技术的研究重点。
提高惯导系统精度通常可以采用2种技术途径:1)直接提高惯性器件精度;2)采用误差补偿技术,降低惯性器件误差对导航精度的影响。前者难度大、成本高且周期长,后者则相对简单、快捷而实用[1]。
旋转调制技术是较常用的一种误差补偿方法,即将惯性器件或者惯性测量组合(Inertial Measurement Unit,IMU)外面加上转动和控制机构,利用翻转或者旋转将低频变化的惯性器件误差源调制为高频信号,进而有效地补偿惯性器件误差对导航的影响[2]。旋转方式根据旋转部件可分为2类:1)壳体旋转(元件级旋转),一般应用于静电陀螺系统;2)是台体旋转(系统级旋转),即整个惯性测量组合同步旋转[3]。
早在20世纪50年代末,就有学者提出了通过旋转调制技术补偿惯性器件漂移,提高导航精度的方法[4]。60到70年代,美、英和法等国舰船的平台式惯导系统均采用了旋转调制技术,主要实现方法有陀螺壳体旋转法、附加陀螺监控法(陀螺监控壳体反转法、陀螺监控转子正反旋转法、陀螺监控H调制法)和平台旋转法等[5]。70年代,旋转调制技术应用于捷联惯导和陀螺罗经[6]。80年代,旋转调制技术用于激光陀螺,现已有多种成熟产品,并已应用于美国海军、北约舰队等多国武装力量。90年代,开始将旋转调制技术用于光纤陀螺,2009年第一套光纤陀螺三轴旋转惯导系统产品问世。21世纪以后随着微机电系统(Micro Electro Mechanical Systems,MEMS)惯性技术的发展,已逐渐开展旋转调制技术在MEMS陀螺寻北、航姿系统以及惯导系统中的应用研究[7]。总的来说,美国针对旋转调制技术研究时间长,投资大,新研制和改进的旋转惯导系统性能居世界前列,其双轴旋转调制方式的MK49和WSN-7A是目前世界上最先进的旋转调制型捷联惯导系统,其研制的三轴旋转光纤惯导系统计划应用于战略核潜艇以及洲际弹道导弹中。下面对国内外的旋转调制系统的发展和应用状况进行简要介绍。
1 平台式惯导系统中的旋转调制
1963年美国Rockwell国际公司Autoneties航海系统分公司首次将旋转补偿技术应用于MK2Mod3惯导系统中。美国Sperry公司生产的MK3Mod3及以后各型舰船惯导系统均采用了监控陀螺壳体反转技术。美国1965年研制出的SGN-4型舰船惯性导航仪,1971年研制出的MAINS型舰船的惯导系统,以及1974年研制出的MINS型系统均采用监控陀螺壳体反转技术。法国SAGEM公司从1981年开始研制小型化舰船惯导系统MINICIN,采用陀螺监控H调制技术,供水面舰艇和潜艇使用[8]。
20世纪70年代初,美国Delco公司研制出轮盘木马IV(Carousel IV,C-IV)型四框架平台惯性导航系统,该系统采用平台旋转技术,该系统是第一个成功将旋转补偿技术应用于系统结构的惯导系统,如图1所示,系统的定位精度为1nmile/h[9]。轮盘木马及其改进型先后装备了多种型号的民航机和军用运输机,并被宇宙飞行器“大力神—Ⅲ”所采用[10]。

图1 Carousel IV 惯性导航系统结构图
2 捷联式惯导系统中的旋转调制
2.1 基于激光陀螺的旋转惯导系统
2.1.1 AN/WSN-5L型船用单轴旋转惯导系统
1984年,Litton公司在AN/WSN-5型液浮惯性导航系统的基础上,开始研制激光陀螺惯性导航系统AN/WSN-5L。其IMU包含3个腔长为28cm的环形激光陀螺和1个A4 MOD IV D三轴加速度计。系统采用激光陀螺速率偏频技术,旋转部件具有1800°的活动度,工作时限于1440°,转台以±720°方式往返旋转。该系统在1993年装备了美国海军阿里·伯克级DDG64号导弹驱逐舰[11],定位精度1.0nmile/6h。
2.1.2 SLN型舰用双轴旋转惯导系统

2.1.3 MK39Mod3C与AN/WSN-7B单轴旋转惯导系统[8,9,12,13]
上世纪80年代,美国Sperry航海公司利用改进
的磁镜偏频激光陀螺研制了单轴旋转系统,并进行了相关海上试验。其单轴系统采用单轴四位置转停方案来补偿光学陀螺的漂移,这也成了以后世界上所有成熟的单轴旋转式惯导系统的主要调制方案。由于磁镜偏频激光陀螺精度较低,Sperry航海公司随后开展了二频机抖激光陀螺单轴旋转调制惯导系统的研制工作。在90年代研制出的Mk39系列激光惯导系统已经被多个国家海军选用于各种舰船平台;随后在MK39Mod3C基础上又发展的改进型AN/WSN-7B单轴旋转系统,已装备美国海军舰船及护卫舰。其中,MK39Mod3C使用Honeywell公司的DIG-20型三角形激光陀螺,WSN-7B使用该公司的GG1320环形激光陀螺,加表均使用QA-2000型,采用单轴四位置旋转方案(-45°、-135°、+135°、+45°),如图2和3所示[12]。2个系统自主导航精度达到1nmile/24h,性能优良,价格低廉。

图2 MK39MOD3C单轴旋转惯导系统

图3 AN/WSN-7B单轴旋转惯导系统
2.1.4 MK49型双轴旋转惯导系统[8,12,14,15]
1989年11月,在Sperry航海公司研制的单轴旋转惯导系统和Honeywell公司研制的SLN舰用激光陀螺导航仪的成功经验基础上,两家公司合作研制了MK49高精度船用环形激光陀螺导航仪,采用双轴转位技术,当时称其为舰用激光陀螺惯性导航系统(MARLIN)。该系统经过海试后,被选为北约组织的船用标准惯性导航系统[16-17],大量装备于水面舰艇和潜艇。系统由惯性测量装置、电子柜、控制显示器和减振装置组成,其中惯性测量装置中包括3个GG-1342环形激光陀螺、3个QA-2000石英挠性加速度计、1个高压电源、温控电路板和加热元件。系统外观如图4所示,内部结构如图5所示。2个旋转轴(内框轴为方位轴、外框轴为横滚轴),系统绕这2个轴交替以180°旋转,并在对称位置旋转、停留相同时间以抑制惯性器件慢变误差,系统的定位精度达到0.39nmile/30h,另外,该系统还能进行自标定、自对准以及隔离基座晃动的干扰等。
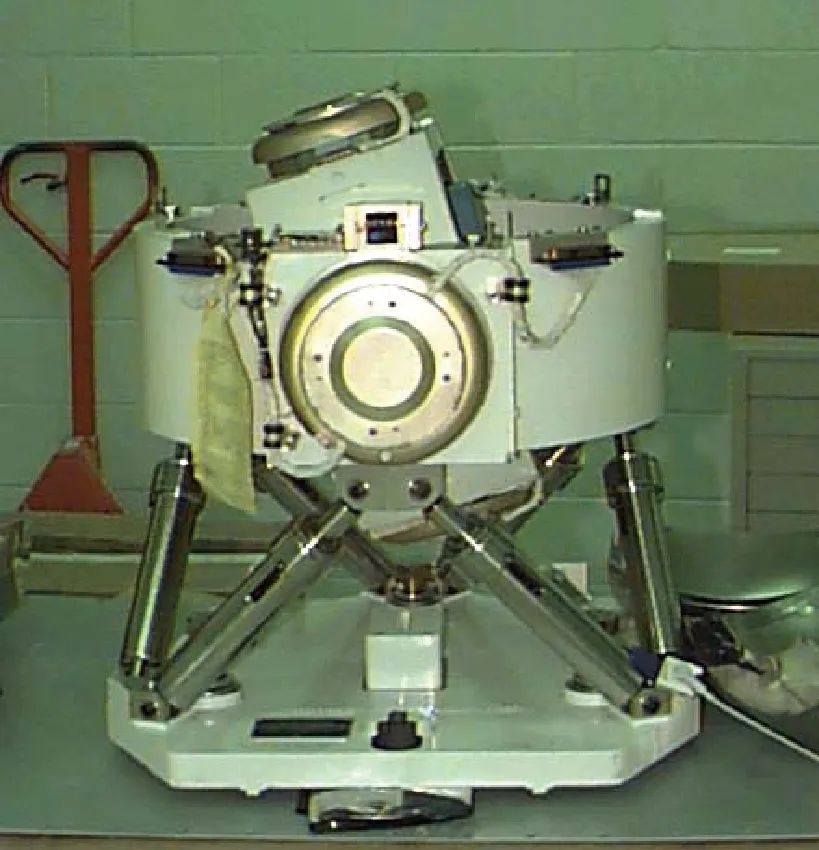
图4 MK49双轴旋转惯导系统

图5 MK49双轴旋转惯导系统结构
2.1.5 AN/WSN-7A双轴旋转惯导系统[9,18]
20世纪90年代,Sperry航海公司在MK49的基础上发展了AN/WSN-7A系统,于 1995 年开始列装美国海军,如图6所示。系统惯性元件采用GG-1342型环形激光陀螺和QA-2000石英挠性加速度计,定位精度达到1nm/14d。AN/WSN-7系列惯性导航系统已成为美国海军水面舰艇和潜艇的标准设备,2006年左右已经装备美国海军除装载弹道导弹核潜艇以外的所有舰艇。

图6 AN/WSN-7A双轴旋转惯导系统
2.1.6 PL41/MK4型单轴旋转惯导系统[11,19]
诺格Litef公司为德国海军潜艇导航研制出PL41/MK4 Mod1型激光陀螺单轴旋转惯性导航系统,并于1988年进行了海上实验。系统采用的是速率偏频激光陀螺捷联方案,IMU选用了3个腔长为28cm的环形激光陀螺和3个加速度计,具有平台式系统的稳定性和捷联式系统的简单性、紧凑性和坚固性,其外观如图7所示。系统采用了Kalman滤波技术,初始对准时间为30min,定位精度为1nmile/8h。
之后,在Modl系统基础上,发展了适用于潜艇使用的Mod2系统,采用腔长为18cm的环形激光陀螺ZLGTM,应用零位闭锁技术,定位精度为1nmile/24h。

图7 PL41/MK4型单轴旋转惯导系统
2.1.7 水下机器人双轴旋转惯导系统(日本)
2007年,日本海洋科技研究中心(JAMSTEC)在其研制的水下机器人(URASHIMA)的导航定位系统中进行了误差旋转补偿技术的研究。URASHIMA的导航系统采用激光陀螺捷联惯导系统。试验证明,当采用双轴连续转动方案时,系统的导航定位精度由0.2nmile/h提高到0.09nmile/h。系统试验环境如图8所示[8]。

图8 水下机器人的双轴旋转惯导系统实验结构图
表1对国外典型激光陀螺旋转惯导系统的应用情况、状态进行了简单的对比总结。

表1 国外典型激光陀螺船用惯导系统应用情况
2.2 基于光纤陀螺的旋转惯导系统
2.2.1 三轴旋转光纤陀螺惯导系统(美国)

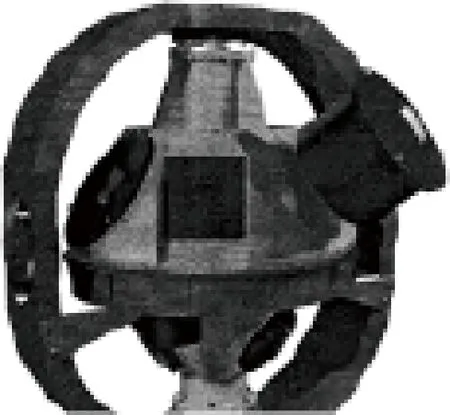
图9 三轴旋转光纤陀螺惯导系统原理样机
2.2.2 奥米伽单轴旋转惯导系统(俄罗斯)
俄罗斯圣彼得堡电子仪器仪表所已开发出几种单轴旋转式光纤惯导系统,奥米伽是这一系列产品的典型代表,应用于民用船舶,如图10所示。该惯导系统使用的是中低精度俄罗斯自研的光纤陀螺,该系统主要技术指标如表2所示[22-23]。

图10 奥米伽单轴旋转光陀螺惯导系统示意图
3 国内旋转惯导系统[12,24]
我国旋转调制技术的研究工作开始于上世纪70年代,初期主要应用于静电陀螺平台系统的陀螺壳体翻转技术,随后该技术在陀螺罗经和寻北仪的研究领域得到应用。国内对于激光陀螺旋转惯导系统研究的较多,已有工程样机出现,对于旋转光纤陀螺惯导系统的研究则起步较晚。国防科技大学在2007年研制出国内第一台旋转调制惯导系统,该系统采用绕方位轴连续旋转的单轴旋转方案,实验室静态定位误差小于1nmile/24h,而船试定位误差为17nmile/24h左右;在2008年和2009年又分别对四位置转停的旋转方案进行了车载系统实验和船载系统实验。该大学研制的90型二频机抖激光陀螺单轴旋转捷联惯导系统最大峰值定位误差均优于1nm/72h,其中多套最大峰值定位误差优于2nm/10d,达到了单轴旋转惯导系统的国际先进水平,已经走向成功应用[25]。目前,国防科学技术大学、北京航空航天大学及中航618所等科研单位对双轴旋转调制惯导系统的理论和样机研制展开了深入研究,其中国防科技大学研制的90型二频机抖激光陀螺双轴旋转惯导系统样机静态精度优于0.6nm/14d[26]。
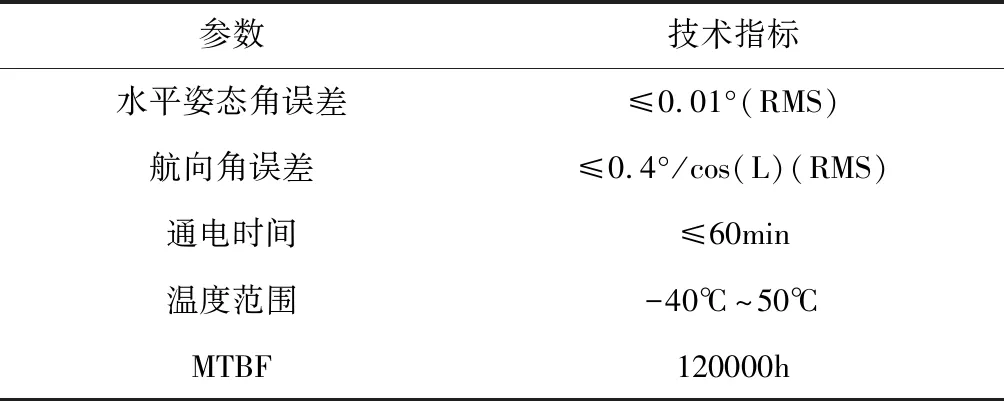
表2 奥米伽单轴旋转光纤陀螺惯导系统主要参数
4 旋转调制关键技术
旋转惯导与旋转调制相关的关键技术主要有如下4个方面:
1)旋转惯导误差特性建模及补偿技术
旋转惯导系统是一种特殊的捷联式惯导系统,在误差源、误差方程的表现形式上与捷联式惯导系统有很多相似性。然而,由于旋转调制技术的引入,各误差项会受到旋转机构周期性旋转运动的调制,从而使得误差传播方式发生了变化。
2)旋转惯导转动方案
由于旋转惯导的旋转轴有单轴、双轴和三轴旋转模式,而转动模式进一步可设计为连续旋转、转停交替等多种样式,此外旋转角速率、旋转周期的设计也很重要,这些都对导航精度有直接影响,需要进行深入分析和研究。
3)旋转机构及其旋转控制技术研究
旋转机构主要由支撑机构、执行元件、旋转轴、旋转环架、传动装置、传感器和控制器等部分组成,其控制误差主要有角度超调误差和转速波动,而此控制误差对导航精度有较大影响。
4)载体角运动隔离技术
在旋转惯导系统中,旋转方案设计的旋转机构的运动都是相对于导航坐标系的,但是在实际控制旋转机构时,所有的旋转控制都是相对于载体坐标系的。因此,若载体相对于导航坐标系发生角运动,则旋转机构相对于导航坐标系的运动与旋转方案设计的不完全相同,从而造成无法完全有效地调制惯性器件的误差,降低旋转调制的效果。
5 结论
国外旋转调制惯导系统的成功应用表明采用旋转调制技术是光学陀螺惯导系统实现更高导航精度的重要且有效的技术途径。近年来,国内在光学陀螺旋转惯导系统的理论及应用方面也开展了大量研究工作,取得了可喜的成果。但要满足高精度的航海、航空以至航天领域长时间自主导航需求尚需加大应用研究的力度和深度。
猜你喜欢
矿产勘查(2020年2期)2020-12-28 00:23:36
工程与建设(2019年1期)2019-09-03 01:12:38
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
电子测试(2017年12期)2017-12-18 06:35:42
制造技术与机床(2017年8期)2017-11-27 02:10:12
凿岩机械气动工具(2017年3期)2017-11-22 07:21:29
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:44
照明工程学报(2016年3期)2016-06-01 12:18:01