用于海上油膜厚度测量的激光光强调节装置设计
2019-04-13 03:32:24邬海强
天津大学学报(自然科学与工程技术版) 2019年6期
陈 曦,金 文,邬海强,李 颖
用于海上油膜厚度测量的激光光强调节装置设计
陈 曦1,金 文1,邬海强2,李 颖3
(1. 天津大学电气自动化与信息工程学院,天津 300072;2. 国家海洋技术中心,天津 300112; 3.大连海事大学航海学院,大连 116026)
针对海上溢油油膜厚度测量浮标在实际海试过程中出现的海水浊度影响测量结果的情况,设计开发了适用于差分激光三角法油膜厚度测量的激光光强调节装置. 该装置的设计指标为调节时间小于400ms,超调量小于10%,可应用于浊度0~100NTU的水中. 首先基于单色光束在不同浊度水中传播的衰减规律,建立了差分激光三角法油膜厚度测量系统的控制模型. 然后为了保证在不同浊度的海水中电荷耦合元件(CCD)接收到的光强保持稳定,提出了一种基于比例积分校正的鲁棒激光光强调节器设计方法. 该方法利用根轨迹根增益与复平面上点实部、虚部的关系来选择调节器的增益,并利用积分环节使得稳态误差为零. 最后进行了仿真实验和标准浊度液中的实验. 仿真实验表明:在不同光强衰减率下激光光强调节装置都能使CCD接收到的光强保持稳定,且超调量、调节时间等指标都能满足设计要求. 在不同标准浊度液中进行的测量实验表明,CCD成像质量较好且未随浊度改变而发生明显变化,证明了该激光光强调节装置的有效性.
油膜厚度测量;海水浊度;光强调节;鲁棒根轨迹
海上溢油事故会对自然环境造成极其严重的危害.对溢油油膜进行厚度测量并结合遥感等获取的溢油面积数据来估计溢油量[1],对于溢油事故的早期应急处理和中长期海洋生态修复[2]具有重要意义.文献[3-5]提出了利用斜射式激光三角法进行油膜厚度非接触式测量的方法.文献[6-7]在文献[3-5]的基础上,提出了一种改进的直射式上、下双光路差分激光三角法的方案,并基于该方案研制了海上溢油油膜厚度测量浮标样机.针对浮标样机在实际海试过程出现的海水折射率影响测量精度的问题,文献[8]分析了该问题产生的原因,并提出了一种基于二维曲面拟合的误差补偿方法,实验数据说明该方法可有效降低因海水折射率不同而产生的测量误差.在实际海试过程中同时观察到了海水浊度对测量过程产生的影响.在应用激光三角法测量油膜厚度过程中,由于下光路部分光路位于海水中,激光器发出的激光会因海水的作用而衰减,造成光强下降.海水的混浊程度不同,光强的衰减程度也不同.海上溢油油膜厚度测量浮标的标定只能在某一确定浊度的水(如在实验室环境下的零浊度水)中进行,由于测量环境海水浊度和标定时浊度不一致,会造成用于光强接收的CCD传感器产生饱和现象或信号信噪比低,进而对测量产生不利影响.为了减少这种不利影响,提出了一种用于海上溢油油膜厚度测量的激光光强调节装置,该装置通过引入闭环反馈,即使在海水浊度发生变化时,调节器也能够自动调节激光器出光光强,使得海上溢油油膜厚度测量浮标在不同浊度的海域中都能可靠、稳定工作.
1 差分激光三角法油膜厚度测量原理及其控制模型的建立


上光路全部位于空气中,光强不会受到环境的显著影响,而下光路650nm的激光光源经过海水介质照射到油膜下表面,海水会对光强产生衰减作用.根据朗伯定律,单色光束在水中传播的衰减规律符合

(2)

(3)

(4)

图2 激光光强与光斑形状


(5)
图3 差分激光三角法油膜厚度测量系统的控制模型
Fig.3 Control model of oil film thickness measurement based on differential laser trigonometry

图4 半导体激光器电流源驱动装置与电路

2 调节器设计


(6)
根据式(6),对图3所示控制模型进行简化,如图5所示.

图5 简化的差分激光三角法油膜厚度测量系统的控制模型

步骤1计算开环增益.根据调节器设计性能指标要求“在阶跃信号作用下,稳态误差为零”,选择基于PI控制器的串联校正,PI控制器为

(7)

(8)

(9)

(10)

好学校的前提是有先进的办学理念。衡量办学理念是否先进,主要有4个维度:一是人人发展;二是全面发展;三是个性发展;四是终身发展。只有4个维度统筹兼顾,才是高质量的学校。我对教育的看法比较通俗,就是按人的成长规律对受教育对象给予帮助,包括帮助他掌握知识、培养能力、提升性情。所以,我提出“让每一位学生能找到自己卓越的领域” 的办学宗旨,就是让每位学生知道自己的潜能,建立起自信,让每个孩子展示出他最闪亮的一面,这对他们今后的人生是很重要的。广州五中既培养出了大批考上重点大学、成为社会各界英才的学生,也培养出了中国首位加入西班牙皇马俱乐部的现役国青足球队前锋林良铭,这就是很好的例证。

(11)
根据期望的加入调节器后的闭环主导极点计算公式

(12)
期望闭环主导极点应满足根轨迹相角条件,即


(13)
由此得到


图6 k与Re s、Im s的关系

图7 原始系统和加入PI调节器后系统的比较

(14)
3 仿真与实验结果
3.1 仿真结果与分析

图8 不同值下的阶跃响应比较

表1 超调量和调节时间

Tab.1 Overshoot and the settling time
3.2 标准浊度液中的测量实验
为了检验激光光强调节装置在不同浊度水中的控制效果,进行了标准浊度液中的测量实验.该实验在天津大学万级超净间无光环境下进行,在没有光源的情况下,超静间内杂散光照度小于或等于1lx.实验装置如图9所示.首先在样品池内注入标准浊度液,然后在浊度液表面布放原油.标准浊度液的浊度分别为0、10、30、50、80、100NTU.使用包含7450个像素的线扫描CCD采集光斑图像.

图9 激光光强调节装置
考虑到像素点上接收光强超过阈值就会出现饱和现象,所以取一帧图像中的强度最大值为输出量,即如果强度最大值小于给定阈值,那么其余像素点的光强也必然小于给定阈值,这样就不会出现饱和现象.实测的CCD图形如图10所示,图中横坐标是线扫描相机的像素点,纵坐标是经模数转换器转换的8位二进制数字量形式的光强值,从图中可以直观地看出在不同浊度下的光强值都稳定在预设值200附近,达到调节器设计要求.随着浊度增大,光斑图像的毛刺增多,这是因为随着水的浊度增大,水中粒子数量增多,粒子对光的散射作用增大,从而造成毛刺增多.此外由图可见光斑直径也呈增大趋势,由于该测量系统采用直射式差分激光三角法,CCD上接收到的是散射光,随着浊度增大,粒子对光的散射作用增大且散射光方向各不相同,这些散射光经透镜汇聚后在CCD上成像,造成光斑直径变大.
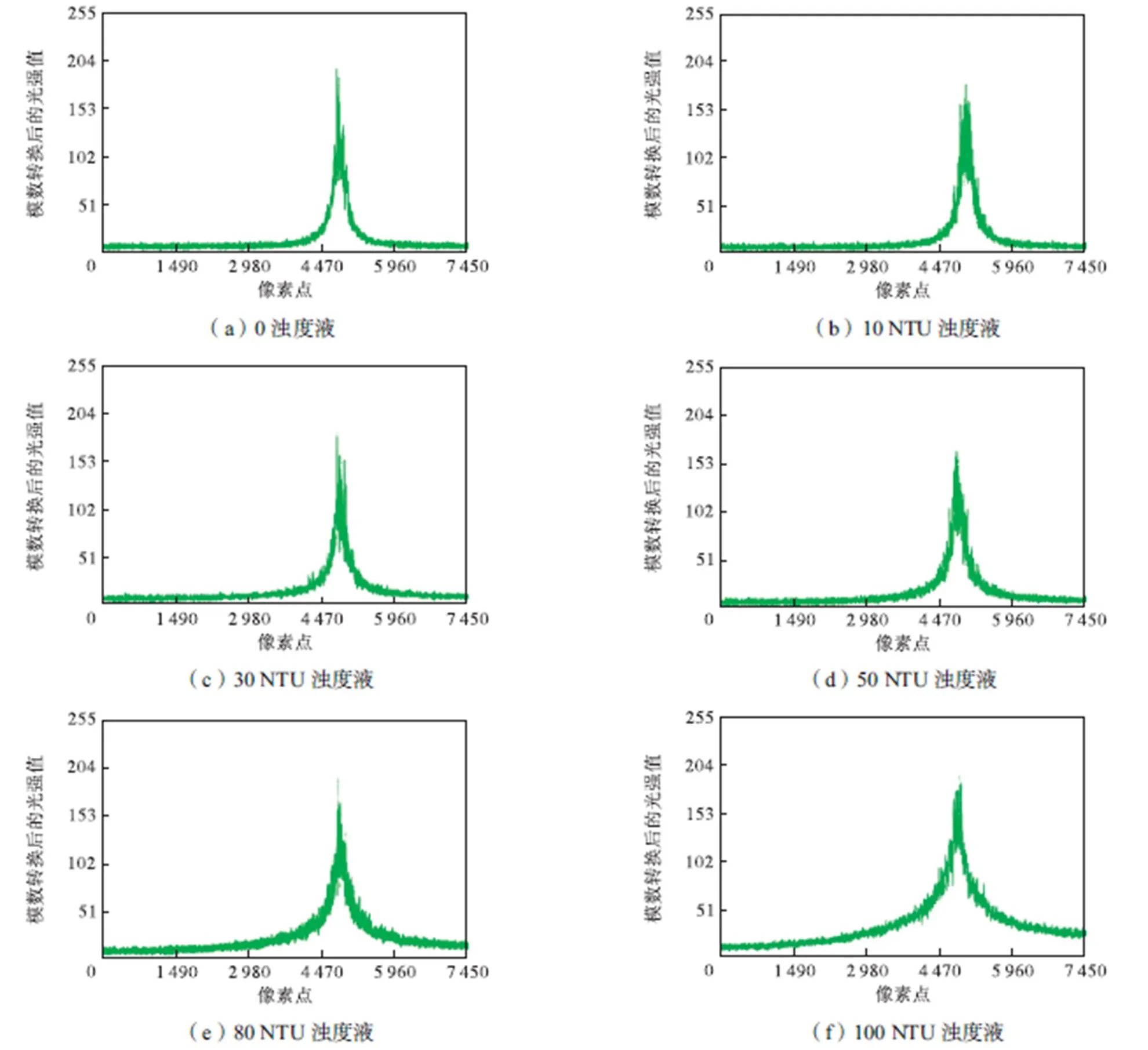
图10 不同浊度液中使用激光光强调节装置后的CCD图像
作为对比,对未采用激光光强调节装置的系统也进行了测量实验,实测的CCD图形如图11所示,由图可知,由于没有采用闭环反馈,所以浊度液对激光光源产生了严重的衰减作用,以100NTU浊度液为例,其光强仅为0浊度液中的1/4.

图11 不同浊度液中未使用激光光强调节装置后的CCD图像
4 结 语
在应用激光三角法进行海上溢油油膜厚度测量过程中,激光器的激光光能会因海水浊度的差异而产生不同程度的衰减,使得CCD出现产生饱和现象或信号信噪比低的情况,进而影响测量结果.有鉴于此,设计了一种可有效克服海水浊度影响的鲁棒激光光强调节装置.在设计过程中,基于单色光束在不同浊度水中传播的衰减规律和CCD成像原理建立了被控对象模型.利用复平面上根轨迹增益与开环极点实、虚部间的二元函数关系确定比例-积分控制器中的相关系数.仿真实验和在标准浊度液中的实验都证明了该方法的有效性.浊度改变必然会引起折射率的改变,将本文所提算法与折射率补偿算法相结合,进一步提高海上溢油油膜厚度测量精度,是今后要开展的研究工作.
[1] 卢文玉,祝宝忠,贾晓强. 处理高黏度溢油的溢油分散剂的制备及优化[J]. 天津大学学报:自然科学与工程技术版,2019,52(1):26-32.
Lu Wenyu,Zhu Baozhong,Jiao Xiaoqiang. Development and optimization of oil spill dispersant for high viscosity oil spill[J]. Journal of Tianjin University:Science and Technology,2019,52(1):26-32(in Chinese).
[2] 周一兵. 基于沙蚕多功能群匹配的湿地微宇宙对石油烃去除效果研究[D]. 大连:大连海洋大学,2015.
Zhou Yibing. Research on the Oil Removal Capacity of Polychaete-Microrganism-Plant Combined Bioremediation System Using Microcosm Method[D]. Dalian: Dalian Ocean University,2015(in Chinese).
[3] Lü Qieni,Lu Lin,Ge Baozhen,et al. Differential laser trigonometry for measuring the oil film thickness on water[J]. Journal of Modern Optics,2012,29(11):947-953.
[4] Lü Qieni,Wu Hao,Wu Di. Experimental determination of the system parameter of oil thickness measurement[C]// Proceedings of SPIE the International Society for Optical Engineering. Beijing,China,2010:7850.
[5] Lü Qieni,Ge Baozhen,Yao Wenda,et al. A method for measuring the thickness of transparent oil film on water surface with laser trigonometry[J]. Optics and Lasers in Engineering,2011,49(1):13-15.
[6] Wu Di,Lü Qieni,Lu Lin,et al. Laserimage spot processing for sea oil film thickness measurement[J]. Optics and Lasers in Engineering,2014,61(8):676-682.
[7] Ge Baozhen,Sun Jingbin,Liu Pengcheng,et al. Designing an optical set-up of differential laser triangulation for oil filmthickness measurement on water[J]. Review of Scientific Instruments,2013,84:013105.
[8] 耿云飞,陈 曦,金 文,等. 海水折射率对差分激光三角法油膜厚度测量精度的影响[J]. 中国激光,2015,42(4):0408004.
Geng Yunfei,Chen Xi,Jin Wen,et al. Influence of seawater refractive index on the precision of oil film thickness measurement by differential laser triangulation[J]. Chinese Journal of Lasers,2015,42(4):0408004(in Chinese).
[9] Rodier F. Adaptive Optics in Astronomy[M]. Cambridge:Cambridge University Press,1999.
[10] Barmish B R,Tempo R. The robust root locus[J]. Automatica,1990,26(2):283-292.
[11] Hwang Chyi,Yang Shih-Feng. Characterization and computation of robust root loci for systems having parametric uncertainties[J]. Journal of the Chinese Institute of Engineers,2011,34(5):695-710.
[12] Hwang Chyi,Yang Shih-Feng. Plotting robust root locus for polynomial families of multilinear parameter dependence based on zero inclusion/exclusion tests[J]. Asian Journal of Control,2003,5(2):293-300.
[13] Kostov K,Karlova V,Todorov A. Robustroot locus application in design and analysis of typical industrial control system model[J]. Cybernetics and Information Technologies,2008,8(1):25-33.
[14] Tong Yuhuan,Siha N K. Design of controller for robots using the robust root locus of descrete time systems[C]//Proceedings of the IEEE International Symposium on Industrial Electronics. Xi’an,China,1992:78-82.
[15] Nakhmani A,Zeheb E,Lichtsinder M. Robust controller design based on generalized bode envelopes[J]. IMA Journal of Mathematical Control and Information,2012,29(2):171-198.
Regulator of Laser Luminous Intensity for the Measurement of Sea Oil Film Thickness
Chen Xi1,Jin Wen1,Wu Haiqiang2,Li Ying3
(1. School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China; 2. National Ocean Technology Center,Tianjin 300112,China; 3. Navigation College,Dalian Maritime University,Dalian 116026,China)
Ocean turbidity has been found to affect the measurement of sea oil film thickness during the marine test of buoys. To mitigate the inaccuracy introduced by turbidity,a regulator of laser luminous intensity was developed as the light source of the instrument on the basis of the vertical incidence differential laser trigonometry. The regulator can be utilized in water of 0—100NTU,the settling time is less than 400ms,and the overshoot is less than 10%. A model for control system was set up by utilizing both the depression law of the spreading of the monochromatic light and the imaging principle of charge-coupled device(CCD). A proportional-integral-based robust regulator was presented to ensure that the CCD can capture a stable light energy. The gain of the robust regulator was calculated by using the relationship between the root locus gain and the real part and the imaginary part of poles on a complex plane. Meanwhile,the integral part of the regulator minimized the steady-state error to zero. A simulation and experiments in calibration turbidity standard were conducted. The simulations show that the robust regulator can stabilize the laser luminous intensity regardless of turbidity,and criteria such as overshoot and settling time meet the requirement of the measurement of sea oil film thickness. The experiments in different kinds of turbid water also show that the CCD image quality does not significantly vary with change of turbidity.
measurement of sea oil film thickness;ocean turbidity;regulation of luminous intensity;robust root locus
10.11784/tdxbz201807014
TK448.21
A
0493-2137(2019)06-0576-09
2018-07-07;
2018-11-26.
陈 曦(1980— ),男,博士,讲师.
陈 曦,chenxi@tju.edu.cn.
海洋公益性行业科研专项经费资助项目(201305002).
the Scientific Research Project of Oceanic Public Welfare Profession of China by State Oceanic Administration(No.201305002).
(责任编辑:孙立华)
猜你喜欢
供水技术(2022年1期)2022-04-19 14:11:38
云南化工(2021年6期)2021-12-21 07:31:06
石油商技(2021年1期)2021-03-29 02:36:04
海洋通报(2020年2期)2020-09-04 09:22:48
海洋通报(2020年2期)2020-09-04 09:22:46
酒·饮料技术装备(2018年1期)2018-04-28 09:09:09
制造技术与机床(2017年2期)2017-05-04 04:17:25
新疆钢铁(2016年4期)2016-05-25 00:37:38
中国水利(2015年4期)2015-02-28 15:12:23
河南农业大学学报(2014年2期)2014-04-14 07:54:40