三种降采样成像策略的性能优化以及与传统傅里叶望远镜的比较*
2019-04-13 05:50董磊卢振武刘欣悦李正炜
物理学报 2019年7期
董磊 卢振武 刘欣悦 李正炜
1) (中国科学院长春光学精密机械与物理研究所,长春 130033)
2) (中国科学院大学,北京 100049)
1 引 言
随着通信和气象等业务的不断增加, 对空中平台的需求也越来越多, 这就使得对包括人造卫星在内的空间目标的探测和识别需求日益强烈. 空中卫星的增多, 增加了彼此碰撞的概率, 同时加剧再次发射时的风险. 为了实现对空中己发卫星的实时监控,并预防别国卫星的非授权探测, 需要能观测其运动特性、姿态变化并能识别其形状. 所以, 发展对深空暗弱目标的探测技术成为当前的迫切需要. 傅里叶望远镜 (Fourier telescope, FT) 就是可对远距离暗弱小目标高分辨率成像的新型技术之一[1−7].
FT是一种结合了激光主动照明与光学合成孔径的成像技术, 它对大气湍流的影响不敏感[8,9], 适用于通过大气对远距离的暗弱目标高分辨率成像.潜在的应用包括对地球静止及同步轨道目标成像[10−12], 并可扩展到对快速运动的低轨目标成像[13−15]. FT成像基本原理与用于天文观测的长基线干涉仪类似, 都是通过测量目标的傅里叶分量间接成像, 但FT能够主动改变基线配置, 因而无需依靠地球自转就可以测量不同傅里叶分量. 测量过程中系统与目标需保持相对静止, 因此测量时间直接影响了傅里叶望远镜的成像能力. 采用同时发射三光束的方案可使系统结构较为简单, 但是每次只能测量一个傅里叶分量, 需要很长的测量时间. 采用同时发射多光束的方案虽然每次可测量多个傅里叶分量, 缩短了测量时间, 但由于干涉场复杂模式下信号提取困难, 使得同时发射光束数目受限(约为20多束), 故对成像时间的压缩效果有限, 并且系统复杂度高, 对激光器功率要求很高.
近期提出的压缩感知理论[16−20]表明, 对于稀疏或可压缩信号可以利用随机稀疏采样实现精确重构. FT的成像目标一般都具有规则结构, 因而具有可压缩性, 利用对傅里叶平面的稀疏采样测量可以实现目标图像的精确重构, 从而大大减少测量样本的数量, 有效降低成像时间. 基于上述特点,我们团队开展了基于压缩感知的傅里叶望远镜(compressed sensing Fourier telescope, CS−FT)的初步研究[21], 通过仿真分析验证CS−FT的确具有高精度重构和减少成像时间的特性. 然而, 当时的研究并没有比较压缩感知方法与其他可降低成像时间的方法(如低频全采样 (low−frequency full−sampling, LF) 方法和变密度随机采样 (variable−density random−sampling, VD) 方法)之间的性能差异, 也没有分析上述方法中主要参数的变化对重构结果的影响. 本文将对上述问题开展详细的分析和验证, 通过改变包括总采样率 (total sampling rate, TSR)、低频采样率 (low frequency sampling rate, LSR) 和采样概率密度函数的阶数 (order of the sampling probability density function, OPDF)在内的主要参数, 比较传统FT、LF方法、VD方法和CS方法在成像质量上的差异, 并初步比较上述四种方法在成像时间上的差异. 上述分析所采用的数据均来自于外场实验, 重构结果也包含了实际噪声的影响.
本文的后续部分包括以下内容: 第2部分简要介绍FT的成像原理, 第3部分简要介绍CS−FT的成像原理和图像恢复方法, 第4部分对四种方法的成像质量进行详细的分析和比较, 第5部分对四种方法的成像时间进行简单的分析和比较,第6部分对本文的工作进行总结.
2 傅里叶望远镜简介
FT的工作原理在很多文献中已经有较为详细的论述[22−25], 其系统组成和图像重构流程的示意图分别如图1和图2所示. FT采用3束 (或更多)经过移频和准直的激光束同时照射目标, 通过改变地面发射基线位置实现改变空间频率的目的. 目标反射光包含了与发射基线空间频率相对应的目标频谱信息. 光学能量接收系统收集目标反射光, 经过时间解调和相位闭合处理后可以得到与发射基线空间频率相对应的目标傅里叶分量. 在获得足够多目标傅里叶分量的基础上, 通过逆傅里叶变换(IFFT) 即可重构目标图像.
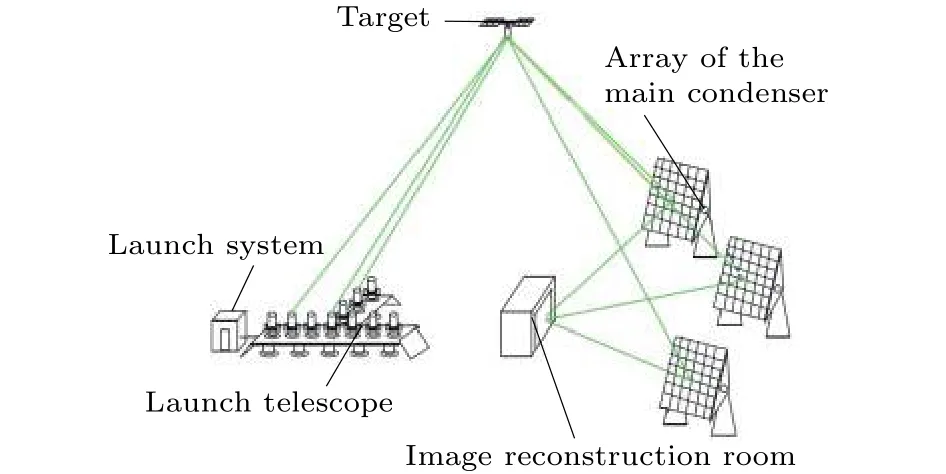
图1 傅里叶望远镜系统示意图Fig. 1. Scheme of the Fourier telescope.
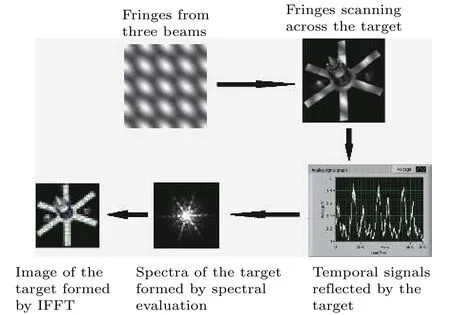
图2 图像重构示意图Fig. 2. Scheme of the image reconstruction.
FT的主要优点为: 主动合成孔径, 通过增大基线以实现几十米甚至上百米的有效口径合成; 可免疫大气湍流的影响, 不需要复杂昂贵的自适应光学系统; 将目标的空间信息调制到时间域, 不需要高光学质量的接收镜, 只需大面积的能量接收镜(光桶)即可实现高分辨力成像.
3 基于压缩感知的傅里叶望远镜
CS理论一经提出, 就在多个应用领域受到高度关注. 其中重要的一例是, CS技术解决了核磁共振成像 (nuclear magnetic resonance imaging,MRI) 图像重构时间过长的难题[18]. MRI的基本原理是通过专用设备对K空间数据 (空间频域)进行采集, 然后通过IFFT重构目标图像. 这与FT成像原理的核心部分–通过发射基线配置实现对目标空间频谱采集, 然后通过IFFT重构目标图像–十分相似, 所以完全可以借鉴CS−MRI的压缩感知应用方式和重构算法, 从而形成CS−FT.
CS−FT技术包含以下几个重要环节: 1) 传统FT数据获取和目标频谱估计技术, 这是FT成像的基础; 2) 利用小波变换和全变分(total variation,TV)变换等方法对待恢复目标进行稀疏表示, 使得只需要远低于奈奎斯特−香农 (Nyquist−Shannon,N−S) 采样的观测数据y就可以精确恢复目标图像;3) 对目标空间频谱进行随机采样 (通过发射基线的随机配置来实现), 使得观测矩阵与稀疏变换矩阵不相关, 满足压缩感知技术的使用要求; 4) 建立图像恢复优化模型, 通过优化算法恢复目标图像.
CS−FT和后面将分析的LF方法和VD方法均属于降采样方法. 降采样方法的最大优点是只需要稀疏采样目标频谱即可重构图像, 和传统FT相比可大大缩短成像时间. 上述三种降采样方法的区别在于采样模式和重构方法的不同. 对于LF方法来说, 采样模式只采样目标频谱的低频部分, 重构方法采用高频频谱补零, 然后整个频谱进行IFFT.由此可见, LF方法的高频信息缺失, 理论上会造成最高分辨率降低. 对于VD方法来说, 采样模式为随机采样目标频谱, 重构方法采用缺失频谱补零, 然后整个频谱进行IFFT. 由此可见, VD方法的高频信息无明显缺失, 理论上最高分辨率下降较小, 但随机降采样和简单IFFT会引入较大的重构噪声, 从而引起图像模糊. 对于CS方法来说, 采样模式为随机采样目标频谱, 重构方法采用压缩感知的恢复算法重构图像. 基于压缩感知的恢复算法可有效抑制由随机降采样和简单IFFT引入的噪声,由此可见, CS方法既能保留最高分辨率又能克服降采样带来的噪声缺陷, 故理论上CS方法的重构质量应优于其他两种降采样方法 (LF和VD).
本文建立的CS−FT图像重构优化模型如下:

下面详细介绍一下CS−FT重构方法. CS−FT的非线性优化算法采用Matlab编写, 其中的小波变换算子利用了Wavelab工具包[26]中的Daubechies小波函数, 计算机模拟基于现有代码[25]. 实验过程中正则化参数和均设定为0.01, 优化过程均经过8次迭代. 傅里叶平面的随机稀疏采样模板利用多项式概率密度函数, 通过Monte−Carlo算法生成. 考虑到目标图像低频部分信息较为集中, 因此采样模板对傅里叶平面低频部分进行了N−S采样.某次随机生成的变密度采样模板图像 (TSR为30%, 低频N−S采样率为10%) 如图3所示.

图3 目标频谱的采样模板Fig. 3. Randomly sparse sampled template.
4 四种重构方法成像质量的分析与比较
本文利用Molniya−1卫星图像进行了实验, 以分析和比较四种图像重构方法 (N−S, LF, VD和CS) 之间的性能差异.
下面简单介绍一下四种重构方法各自所包含的主要步骤.
N−S重构方法: 该方法是传统的FT重构方法,在接收到目标完整信息后, 利用信号解调、相位闭合、频谱估计和图像恢复等步骤重构目标图像.
LF重构方法: 利用传统FT方法获得目标频谱, 然后只取频谱中的低频部分, 高频部分赋零值,再利用IFFT重构目标图像.
VD重构方法: 利用传统FT方法获得目标频谱, 然后利用随机采样模式获取目标频谱, 没有采样的频谱值赋零值, 再利用IFFT重构目标图像.
CS重构方法: 利用传统FT方法获得目标频谱, 然后利用随机采样模式获取目标频谱作为测量值, 接着根据随机采样模式和稀疏变换类型获得压缩感知传感矩阵, 最后利用非线性共轭梯度算法重构目标图像.
FT在实际成像过程中存在一些误差源的影响(包含光束指向误差、大气湍流引起的到达角变化、光束移频频率漂移、激光散斑噪声和探测器散粒噪声等), 而这些误差源在实际成像过程中是无法避免的. 所以在分析过程中采用外场实验数据 (包含上述误差影响), 以研究噪声对四种重构方法的影响程度. 下面简单介绍一下外场实验装置.
外场实验的主要目的是验证传统FT对下行链路 (目标到接收镜) 大气湍流的免疫性和实际噪声源对系统成像性能的综合影响[27,28]. 发射和接收光学系统的原理示意图如图4和图5所示, 两者的实物图分别如图6和图7所示. 目标由胶片打印图片加漫散射体构成, 实物图如图8所示.
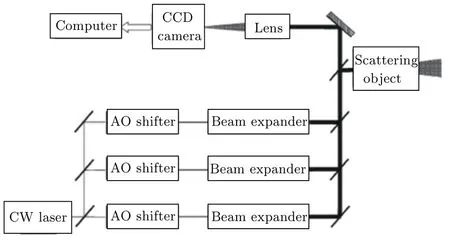
图4 发射光学系统Fig. 4. Schematic diagram of the optical transmitter.
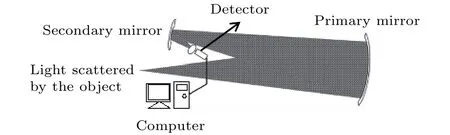
图5 接收光学系统Fig. 5. Schematic diagram of the optical receiver.
在后续分析与比较中, 将改变重构算法中的三个主要参数 (TSR, LSR和OPDF), 比较在不同参数条件下, 四种重构方法在成像质量上的差异. 下面介绍上述三个主要参数的物理含义和取值范围.

图6 发射光学系统实物图Fig. 6. Physical layout of the optical transmitter.

图7 接收光学系统实物图Fig. 7. Physical layout of the optical receiver.
图8 目标实物图Fig. 8. Physical picture of the target.
TSR为三种降采样方法 (LF方法、VD方法和CS方法) 重构图像所需要的目标空间频谱数目与传统FT(满足奈奎斯特采样定理, 即等间隔采样) 所需频谱数目的比值, TSR的取值范围是[0, 1],更小的TSR表示所需的频谱数更少, 成像时间也相应降低.
LSR和OPDF这两个参数只有在变密度采样中存在 (即在VD方法和CS方法中存在), 一般在变密度采样时, 频率较低的频谱选择等间隔采样(满足奈奎斯特采样定理), 频率较高的频谱选择变密度采样 (满足多项式概率密度函数的随机采样,即频率较低的采样率高, 频率较高的采样率低).
LSR是指对于变密度采样来说 (VD方法和CS方法所采用), 等间隔采样的频谱数目与总采样频谱数目 (等间隔采样数和变密度采样数之和) 之比, LSR的取值范围是[0, 1], LSR的取值越小表示等间隔采样的比重越小.
OPDF是指变密度采样中所选择的多项式概率密度函数的最高次数, OPDF取值范围是正整数, 一般选择[3, 10]之间的正整数, 取值越大表示随着频率的增加采样率下降得越快.
为了定量描述重构质量的差异, 对传统FT方法的重构图像进行阈值去噪, 所得结果作为标准图像,计算不同方法的重构图像与标准图像相比的Strehl值. Strehl值的范围是0–1, Strehl值越接近1则图像质量越接近标准图像. Strehl值的计算公式为[25]

4.1 OPDF影响的分析
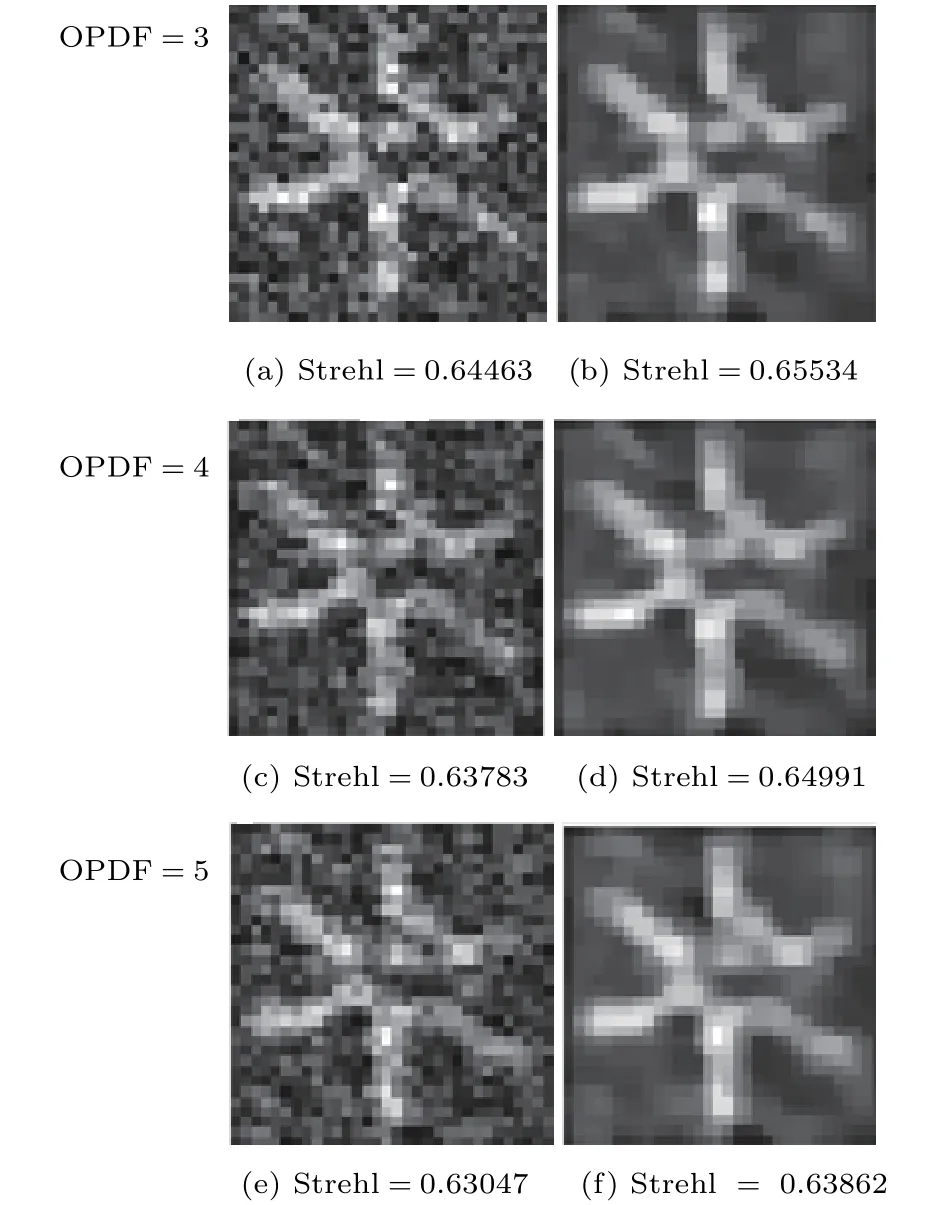
图9 OPDF的影响 (a) 和 (b) 分别是OPDF = 3时的VD图像和CS图像; (c) 和 (d) 分别是OPDF = 4时的VD图像和CS图像; (e) 和 (f) 分别是OPDF = 5时的VD图像和CS图像Fig. 9. The effect of the OPDF: (a) and (b) are the VD im−age and the CS image, respectively, when OPDF = 3; (c)and (d) are the VD image and the CS image, respectively,when OPDF = 4; (e) and (f) are the VD image and the CS image, respectively, when OPDF = 5.
令TSR = 0.2, LSR = 0.2. 当OPDF分别为3, 4和5时, 重构结果如图9所示. 因为OPDF只影响采用变密度采样模式的重构方法, 故只有VD−FT和CS−FT受其影响. 从图9可以看出, CS−FT重构性能随着OPDF的增大而略有下降, 故应尽量选择较小的OPDF. 根据前面对OPDF的含义和取值的介绍可知, OPDF越小表示随着频率的增加采样率下降越慢. 这里的分析说明, 实验所采用的目标频谱主要集中在中低频, 高频信息较少.
4.2 LSR影响的分析
令TSR = 0.4, OPDF = 2.6. 当LSR分别为0, 0.1, 0.3和0.4时, 重构结果如图10所示. 因为LSR只影响采用变密度采样模式的重构方法, 故只有VD−FT和CS−FT受其影响. 从图10可以看出, CS−FT重构性能变化的大致趋势是随着LSR的增大而略有下降, 故应尽量选择较小的LSR. 根据前面对LSR的含义和取值的介绍可知,LSR越小表示等间隔采样的比重越小. 这里的分析说明, 实验所采用的目标频谱的低频信息不多,信息主要集中在中频部分.
4.3 TSR影响的分析
令LSR = 0, 每次重构尽可能选择最小的OPDF. TSR的变化范围为0.05–0.8, 重构结果如图11所示. 从图11可以看出, CS重构性能随着TSR的增大而提升, 但LF−FT和VD−FT的重构性能也随TSR的增大而提升. 当TSR = 0.8时,虽然从Strehl比来看, CS−FT仍然大于LF−FT和VD−FT(差别已经很小), 但从直观感受来说, LF−FT, VD−FT 和 CS−FT 的重构效果与 N−S−FT 几乎无差别. 通过Strhel比和直观观察可以得出,CS−FT的优势主要体现在TSR较小 ( < 0.4) 的时候. 根据前面对TSR的含义和取值的介绍可知,更小的TSR表示所需的频谱数更少, 成像时间也相应降低. 由此可见, 与其他降采样方法 (LF方法和VD方法) 相比, CS方法在较低成像时间时具有较好的成像质量.

图10 LSR的影响 (a) 和 (b) 分别是LSR = 0时的VD图像和CS图像; (c) 和 (d) 分别是LSR = 0.1时的VD图像和CS图像;(e) 和 (f) 分别是LSR = 0.3时的VD图像和CS图像; (g) 和 (h) 分别是LSR = 0.4时的VD图像和CS图像Fig. 10. The effect of the LSR: (a) and (b) are the VD image and the CS image, respectively, when LSR = 0; (c) and (d) are the VD image and the CS image, respectively, when LSR = 0.1; (e) and (f) are the VD image and the CS image, respectively, when LSR = 0.3; (g) and (h) are the VD image and the CS image, respectively, when LSR = 0.4.
综合上述3种情况可以总结出如下规律: 1)在相同TSR情况下, OPDF越小, CS−FT重构效果越好; 2) LSR较小时, CS−FT重构结果较好, 因LSR > 0可能限制总采样数的压缩 (不能进一步减少采样数), 故可以取LSR = 0; 3) 随着TSR的增大, LF−FT, VD−FT 和 CS−FT 的重构性能均提高, 当 TSR = 0.8 时, 三者的差异很小, 均与 N−S−FT几乎无差别. 所以与LF−FT和VD−FT相比, CS−FT的优势主要体现在TSR较小 ( < 0.4) 的时候.
5 成像时间分析
FT属于事后成像系统, 即先利用光学装置分时获得目标的全部信息, 然后通过图像重构程序恢复目标图像. 成像时间包括获取目标信息时间和图像重构时间.
获取目标信息过程主要分成望远镜移动和跟踪瞄准、光束切换和相位补偿等多个操作环节. 因为FT为分时获取目标信息 (每次获取目标的部分信息, 通过多次操作获取目标的全部信息), 每次操作的时间大约为15 s, 所以整个获取目标信息的过程所需时间较长. 下面以每次同时发射三束激光的传统FT为例计算目标信息获取时间. 传统FT每次获取一个目标频谱信息, 想要获得33 × 33分辨率的目标图像, 则需要测量33 × 33个目标频谱分量. 因为实函数的傅里叶变换存在共轭性 (第一和第三象限的频谱互为复共轭, 第二和第四象限的频谱互为复共轭), 故只需测量上述目标频谱的一半(约545个频谱分量) 即可实现成像. 所以33 ×33分辨率的目标图像需要的信息获取时间约为545 × 15 s = 8175 s ≈ 2.27 h.
图像重构过程主要包括信息解调、相位闭合、频谱估计和图像恢复等环节. 对于33 × 33分辨率的目标图像来说, 传统FT的图像重构时间约为114 s, 远小于目标信息获取时间 (约8175 s). 因此, 减少目标信息获取次数是减少FT整体成像时间的关键.
采用基于压缩感知的目标信息获取方法, 可以有效减少信息获取次数 (等于传统FT获取次数 ×采样率), 而增加的图像重构时间仅20多秒, 故可以有效减少FT的成像时间. 不同TSR下, CS−FT、LF方法、VD方法和传统FT的成像时间的比较如表1所示.
通过表1可以看出, 随着采样率的减少, CS−FT的成像时间大幅下降, 当然图像质量也随之下降. 所以应该根据具体的应用需求合理选择采样率, 在快速成像和高质量成像之间平衡.
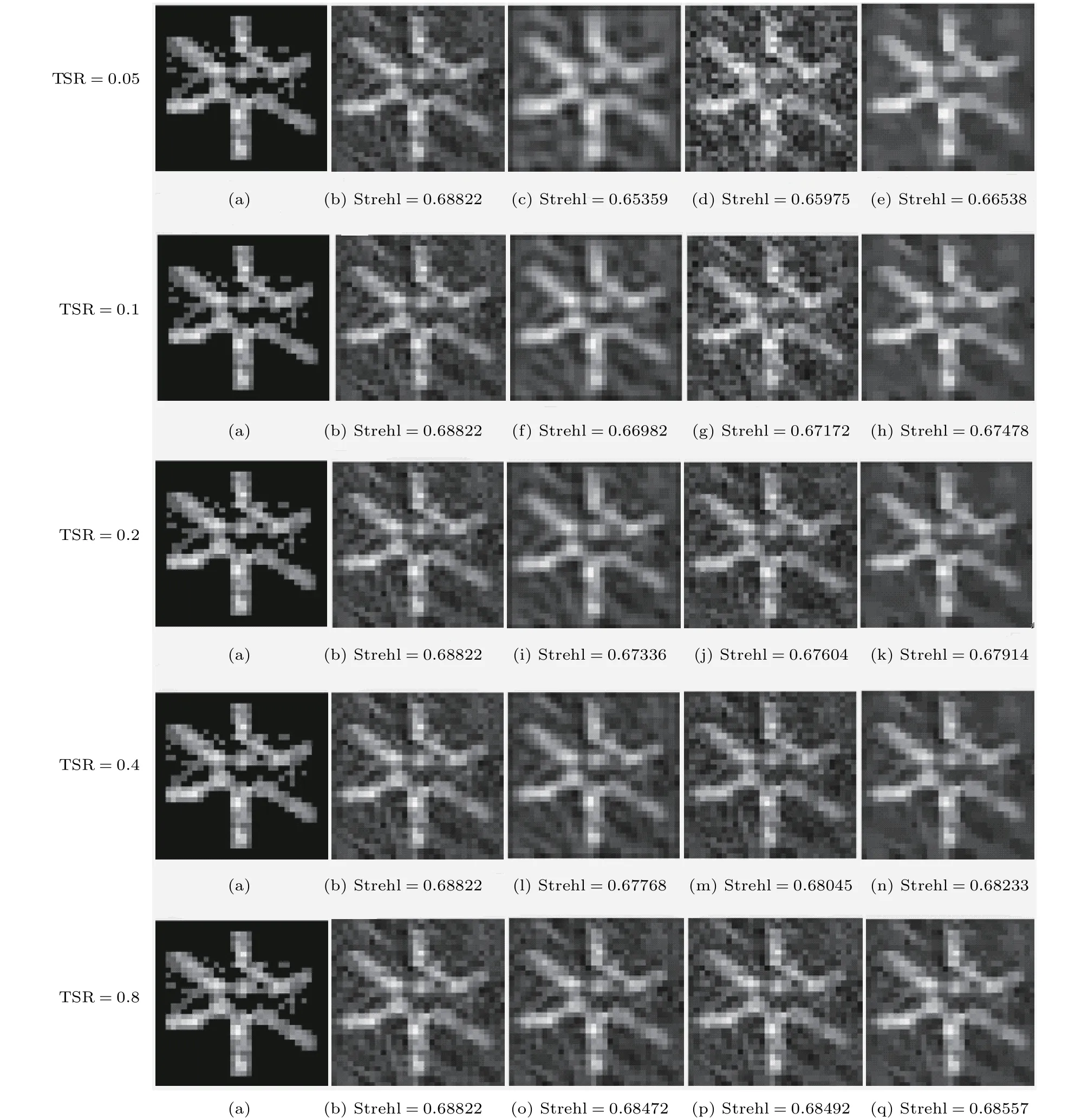
图11 TSR的影响 (a) 和 (b) 分别是标准图像和传统FT图像; (c), (d) 和 (e) 分别是TSR = 0.05时的LF图像, VD图像和CS图像; (f), (g) 和 (h) 分别是TSR = 0.1时的LF图像, VD图像和CS图像; (i), (j) 和 (k) 分别是TSR = 0.2时的LF图像,VD图像和CS图像; (l), (m) 和 (n) 分别是TSR = 0.4时的LF图像, VD图像和CS图像; (o), (p) 和 (q) 分别是TSR = 0.8时的LF图像, VD图像和CS图像Fig. 11. The effect of the TSR: (a) and (b) are the standard image and the traditional FT image, respectively; (c), (d) and (e) are the LF image, the VD image and the CS image, respectively, when TSR = 0.05; (f), (g) and (h) are the LF image, the VD image and the CS image, respectively, when TSR = 0.1; (i), (j) and (k) are the LF image, the VD image and the CS image, respectively,when TSR = 0.2; (l), (m) and (n) are the LF image, the VD image and the CS image, respectively, when TSR = 0.4; (o), (p) and(q) are the LF image, the VD image and the CS image, respectively, when TSR = 0.8.
6 结 论
通过上面的分析可以得出以下结论.
1) 对于三种可以压缩FT成像时间的重构技术来说, 在不同TSR下, CS−FT的重构图像质量均优于 LF−FT和 VD−FT. 例如, 在 TSR = 0.4时,CS−FT 的图像质量 (Strehl = 0.68233) 优于 LF−FT (Strehl = 0.67768) 和 VD−FT (Strehl =0.68045) . 这从实验上再次验证了基于压缩感知的恢复算法可有效抑制由随机降采样和简单IFFT引入的噪声, 与第3部分提到的理论分析结论 (理论上CS方法的重构质量应优于其他两种降采样方法) 相符. 虽然CS−FT的重构时间比LF−FT和VD−FT稍长 (一般多二十几秒), 但重构时间的增加量与整个成像时间 (几百秒至几千秒) 相比可以忽略. 所以总体来说, CS−FT是较好的可压缩FT成像时间的重构技术.

表1 四种方法的比较Table 1. Comparison of the four methods.
2) 对于本文所采用目标的CS−FT成像来说,采用较小的LSR(LSR = 0) 和OPDF(OPDF =3), 可以获得更好的重构图像质量. 这也说明, 本文所采用的目标的信息主要集中在中频段.
3) CS−FT可以大幅压缩FT的成像时间, 但也一定程度上降低图像质量. 应根据具体的应用需求合理选择TSR, 在快速成像和高质量成像之间进行折中.
4) 上面的分析和比较所采用的数据均来源于外场实验, 这说明上述三种降采样重构方法对实际噪声均具有较强的鲁棒性.
当然, 目前对CS−FT的研究工作仍处于初期,还有很多环节需要继续研究, 例如怎样选择合理的发射基线配置以适应频谱随机欠采样的要求, 以及发射基线不连续引起的三项积冗余度下降是否会产生成像性能的明显下降等. 这些新问题将是CS−FT是否可最终实现实际成像功能的障碍, 我们将持续努力逐渐缩短与最终目标的距离.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
防爆电机(2022年3期)2022-06-17
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
科技风(2021年19期)2021-09-07
少儿科技(2021年12期)2021-01-20
中国生殖健康(2020年7期)2020-12-10
北京航空航天大学学报(2018年1期)2018-04-20
通信产业报(2018年40期)2018-01-22
商周刊(2017年6期)2017-08-22