基于姿态传感的隔离开关位置监测系统设计与实现
2019-04-10 09:39:56陈富国尹军华王成智鄂士平
仪表技术与传感器 2019年3期
陈富国,蔡 敏,尹军华,王成智,鄂士平
(1.平高集团有限公司,河南平顶山 467001;2.国网湖北省电力有限公司,湖北武汉 430077)
0 引言
国内高压隔离开关位置常采用遥信信号及现场人工观测判断分合是否到位,这种方法容易受到观测者的主观影响,工作效率低。无人值守站,遥控操作现场通常无法人工确认,目前一些站采用图像识别、压力传感等方法辅助判断隔离开关位置状态,但上述位置监测方法在稳定性、准确性及适应性等方面仍存在较多问题,例如图像识别法算法实现复杂、准确度不高,压力传感法安装困难、无法实现不停电部署及更换等。现有隔离开关分合闸位置监测方法具有一定的局限性,需要寻找新的技术方法和技术手段,实现分合闸位置的精确判断。
随着科学技术不断发展,特别是姿态传感技术的飞速发展及其在航空航天、军事导航、无人机及机器人、机械云台、车辆船舶、虚拟现实和人体运动分析等需要自主测量三维姿态与方位产品中的广泛应用及卓越表现,为隔离开关分合闸姿态位置精确判别提供了一种新的重要思路。本文基于姿态传感原理设计了一套隔离开关分合闸位置监测系统,实现隔离开关分合闸状态的准确判别,为一键顺控操作的实施起到了积极推动作用。
1 系统整体结构设计
一键顺控是指操作项目软件预制、操作任务模块式搭建、设备状态自动判别、防误联锁智能校核、操作步骤一键启动、操作过程自动顺序执行的变电站设备操作模式。依据国能安全[2015]36号文件中电力监控系统安全防护总体方案规定,本监测系统优先采用有线通讯方式将隔离开关位置检测信息传输至接收装置,传感器具有数据重传机制,保证数据可靠传输。系统整体拓扑结构如图1所示。
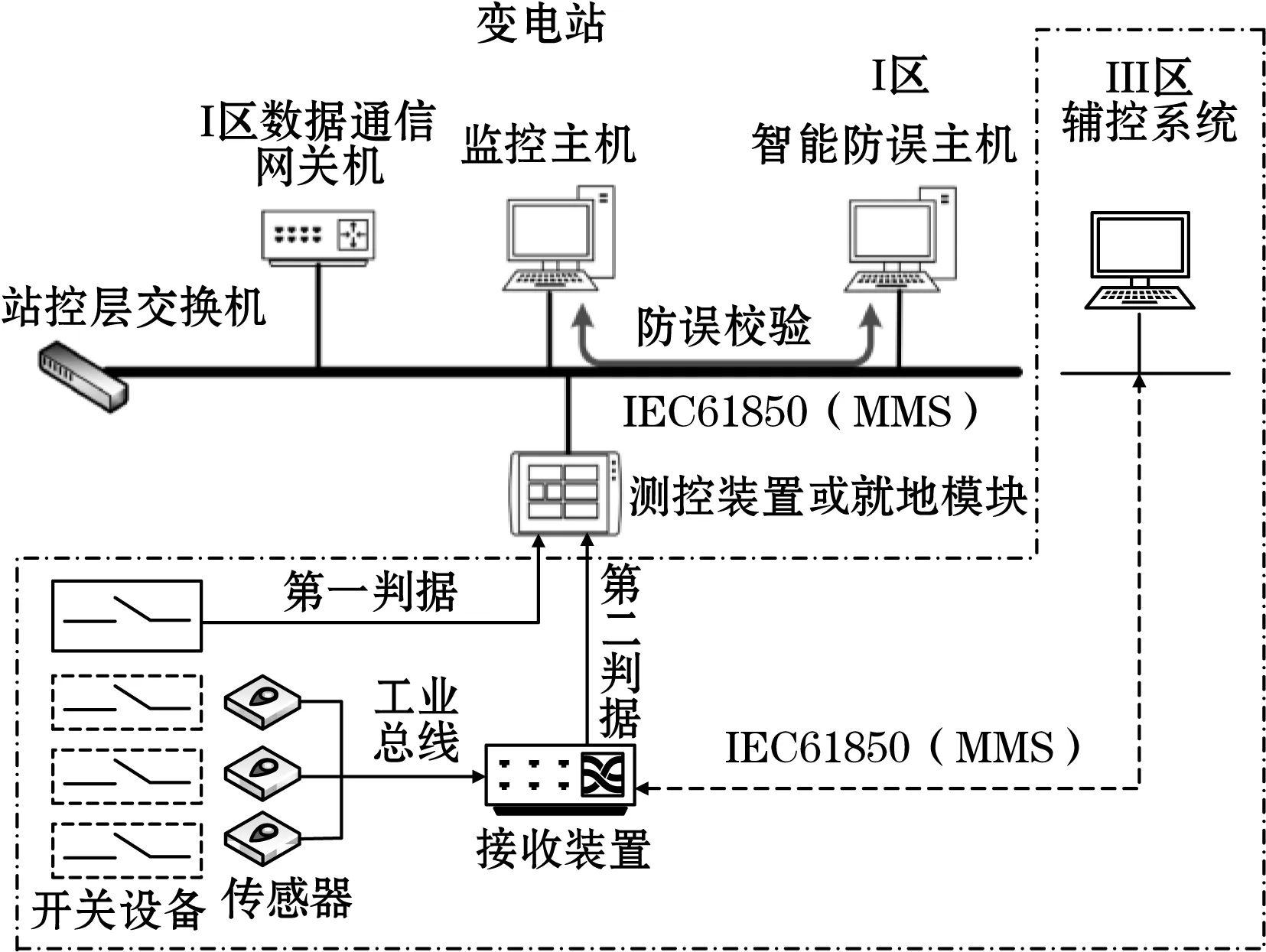
图1 系统整体拓扑结构
对常规站,接收装置输出无源接点至公用测控装置,公用测控装置采用IEC61850(MMS)方式经站控层网络,送至监控主机。
对智能站,接收装置输出无源接点至智能终端或就地模块。智能终端通过IEC61850(GOOSE)经本间隔测控装置送至站控层网络,或经就地模块以IEC61850(MMS)送至站控层网络。
2 基于姿态传感的隔离开关位置监测系统设计
2.1 姿态传感系统架构设计
本文所设计的隔离开关分合闸位置“双确认”姿态传感系统由姿态传感器、接收装置及信号传输系统组成,系统架构如图2所示。

图2 姿态传感系统架构
姿态传感器通过监测传感器所处隔离开关部件的“姿态”(即位置角度情况),计算出传感器的旋转角度和变化情况,从而判断隔离开关是否分合闸到位,传感器通过工业总线方式将隔离开关位置信息传输至就地的接收装置,接收装置经过分合闸位置判别后,输出无源接点至测控装置或就地装置,实现隔离开关“双确认”系统状态的实时监测,同时接收装置将传感器的状态信号(在线状态、自检状态等)通过IEC61850(MMS)上传至III区的后台可视化系统中或接入变电站现有的辅控系统平台,实现隔离开关“双确认”系统状态的实时监测。
2.2 姿态传感器设计
姿态传感器由高性能处理器(MCU)、高精度陀螺仪、加速度计、角度传感器、电源及辅助电路构成,MCU能够快速解算出传感器的实时姿态,静态测量精度为±0.5°,动态测量精度为±1°,MCU采用32位的STM32系列处理器,宽工作电压为1.65~3.6 V,最大工作频率为48 MHz。姿态数据采集采用MPU9250芯片,该芯片内部集成三轴磁力计、三轴加速度计和三轴角度传感器,可编程数字低通滤波,支持用户可编量程,三轴(x,y,z)16位ADC角速度数字输出,具有内部自检功能,传感器采用独立的看门狗,提高稳定性,硬件系统如图3所示。

图3 姿态传感器硬件系统示意图
2.3 接收装置设计
接收装置主要完成姿态传感器数据的解析、隔离开关分合闸状态判断与分析、人机交互、协议转换及继电器接点输出等功能。接收装置硬件示意图如图4所示。

图4 姿态传感接收装置硬件示意图
接收装置的主控芯片采用基于ARMCortex-M3内核的STM32F107VCT6微控制芯片,该芯片性价比高,内核、系统和存储器体积小,具有低功耗和完整的电源管理,性能优越能够满足高挑战性的应用需求,时钟频率可达72 MHz,能够满足高速处理的需要,内部集成以太网10/100MAC模块(支持MII和RMII),连接一个外部以太网物理层接口芯片PHY实现姿态数据的以太网传输,温度范围-40~+85 ℃,可满足现场运行环境要求,具有丰富的外设接口,例如CAN、I2C、SPI、UART、USB等。
DC5 V转3.3 V电路如图5所示。采用AMS1117线性稳压芯片,该芯片固定输出为3.3 V,给各接口电路供电。

图5 DC5V转DC3.3 V电路
2.4 状态判断逻辑
通过姿态传感器对隔离开关分合闸状态进行实时监测,由接收装置根据监测数据对分相隔离开关分合遥信进行确定,判断逻辑如图6所示。

图6 隔离开关位置遥信判断逻辑图
当隔离开关位置遥信由合变分,遥信为分位状态,则确认隔离开关已分闸;当隔离开关位置遥信由分变合,遥信为合位状态,则确认隔离开关已合闸,隔离开关双确认逻辑如图7所示。

图7 隔离开关双确认逻辑图
接收装置采用硬接点输出分合闸状态信号,针对每台隔离开关,输出3路接点信号,2路接点信号指示隔离开关本体分合闸位置情况,另1路接点信号指示传感器工作状态,传感器故障时其接点闭合,正常时分,输出逻辑如表1所示。
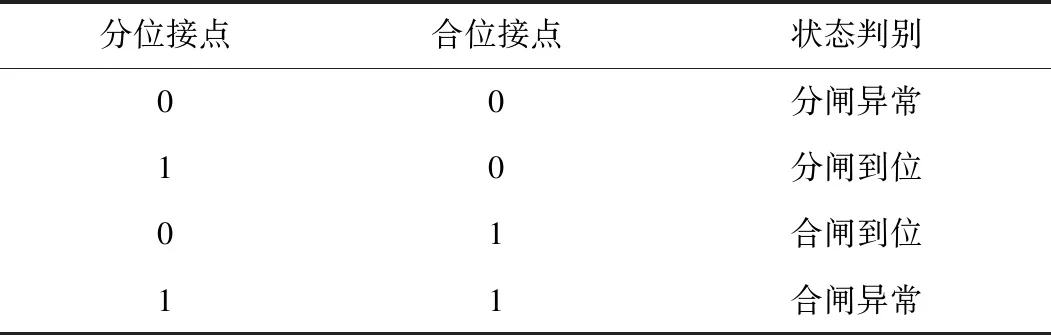
表1 接收装置输出逻辑
2.5 隔离开关分合闸到位判据
姿态传感器的工作形式为,隔离开关在正常工作时处于休眠状态,当隔离开关进行分闸或合闸动作时,会自动唤醒姿态传感器采集数据。传感器判断分闸/合闸到位判据,预设隔离开关在合闸到位时的角度为0°,设隔离开关分合闸到位阈值为Δ,θ始及θ末分别为姿态传感器测量起始角度和终止角度。当满足条件式(1)时,判定刀闸为由合→分的状态,最终分闸到位的状态是传感器检测旋转角度变化等于预设值范围之内。
θ预设-Δ≤θ末-θ始≤θ预设+Δ
(1)
当满足式(2)条件时,判定刀闸为由分→合到位的状态,最终合闸到位的状态是传感器检测旋转角度变化在预设值范围之内。
-θ预设-Δ≤θ末-θ始≤-θ预设+Δ
(2)
当角度>角度门槛值就认为变位,θ末-θ始为正判别隔离开关由分到合,θ末-θ始值为负变小了判别隔离开关由合到分。
3 软件系统设计
3.1 下位机软件设计
姿态传感系统下位机软件由姿态传感器软件和接收装置软件2部分组成,下位机软件设计采用模块化、结构化的思想,以便于对程序和各种功能模块的扩展和移植。
姿态传感器上电后进行系统初始化,对自身状态进行自检一次,并将自检信息上传至接收装置,然后不断监测加速度值,超过设定阈值便唤醒传感器进行姿态数据的采集,然后进行数据的降噪、滤波、校正及解算,然后将数据进行加密后上传至接收装置,传感器可响应接收装置的数据召唤。姿态传感器的软件系统流程图如图8所示,传感器运动唤醒中断流程图如图9所示。
接收装置接收姿态传感器姿态数据,进行分合闸状态判别,然后进行继电器开出、协议转换和实现向站控层可视化系统传输。数据转发模块实现采集数据与IEC61850服务端的交互。
3.2 上位机软件设计
基于姿态传感的隔离开关位置检测系统上位机由MODBUS采集平台、共享内存、智能告警分析、状态判别及数据存储等部分组成,应用程序采用Qt开发完成。应用软件设计采用模块化的设计思想,软件界面如图10所示。
4 IEC61850通信协议设计
为更好地展示姿态传感数据,设计可视化系统,将监测系统的传感器状态信息、隔离开关姿态数据及接收装置的自检信息等通过IEC61850标准协议传输至站控层,设置监测后台系统或集成到变电站一体化辅助监控平台。

图8 传感器软件流程图

图9 运动唤醒中断流程图

图10 上位机软件界面
IEC61850标准是目前电力系统中广泛应用的国际标准。本系统的接收装置采用IEC61850标准规约进行建模并设计完成完整的功能描述。接收装置将采集的数据按照IEC61850标准进行描述,嵌入描述装置各项功能参数的ICD文件[6,10]。本文设计的接收装置用的IEC61850服务端已通过国家继电保护及自动化装置监督检验中心的规约一致性测试试验,完全实现了符合IEC61850标准的间隔层通信功能。
姿态传感接收装置根据IEC61850标准,将监测每个隔离开关描述为一个IED对象,将最小功能单元建模为一个逻辑节点对象。下面以隔离开关姿态数据为例说明IED的逻辑节点类型和逻辑节点数据描述。根据IEC61850标准定义的所有逻辑节点类型描述如表2所示,扩展的逻辑节点数据描述如表3所示。
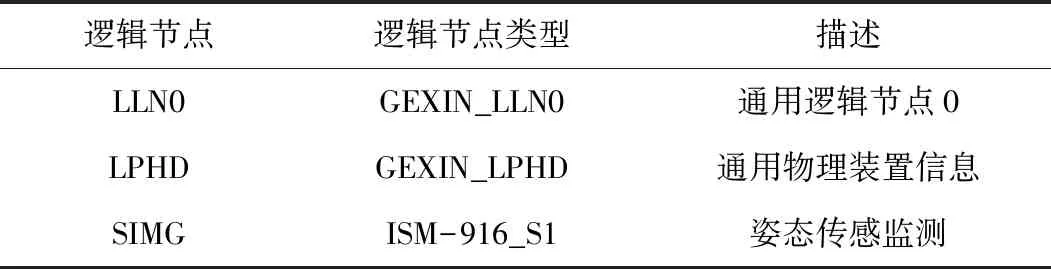
表2 逻辑节点类型描述

表3 姿态传感逻辑节点数据描述
5 试验及现场运行情况
5.1 试验项目
姿态传感器系统的隔离开关性能试验项目和试验要求应该满足《GB1985—2014 高压交流隔离开关和接地开关》和《Q/GDW 1535变电设备在线检测装置通用技术规范》的规定,按照开关本体所做的型式试验是否对安装其上的姿态传感器有所影响的前提下,确认隔离开关本体型式试验项目,确保后期现场改造隔离开关本体加装姿态传感器时,能够正常输出检测数据。试验包括2部分,一是姿态传感器自身的型式试验,主要依据国家电网企业标准Q/GDW 1535—2015的规定进行;二是传感器与隔离开关联合试验,主要试验项目如表4所示。

表4 传感器与隔离开关联合试验项目
5.2 试验验证
2018年9月本项目所研制的ISM-916姿态传感器在中国电力科学研究院通过了性能检测试验。2018年10月份在国家高压电器产品质量监督检验中心(河南)通过了姿态传感器与隔离开关联合试验,试验中姿态传感器系统测量数据正确,数据一致性较好,分合闸状态判别准确率100%,试验照片如图11所示,部分试验数据如表5所示。试验表明本项目所研制的姿态传感系统具有良好的性能,较好地解决隔离开关分合闸位置双确认难题。

图11 样机试验时照片

序号状态辅助开关转换时间/s传感器状态转换时间/s常开触点常闭触点常开触点常闭触点1合8.648.6410.6110.612分9.239.2311.4511.453合8.558.5510.5710.574合9.349.3411.5311.53
6 结束语
为满足国家电网公司第三代智能变电站技术发展,支撑一键顺控操作的实施,本文从工程应用角度出发设计了一套基于姿态传感的隔离开关分合闸位置检测系统,实现隔离开关状态的精确判别与智能分析,为实现变电站隔离开关状态转换的一键顺控操作提供安全保障。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
学生天地(2020年3期)2020-08-25 09:04:16
电子制作(2018年23期)2018-12-26 01:01:26
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
电测与仪表(2015年20期)2015-04-09 11:53:46
水电站机电技术(2014年4期)2014-10-13 08:30:12
中国舰船研究(2014年6期)2014-05-14 06:45:21
河南科技(2014年4期)2014-02-27 14:07:19