图像传感器像素化效应对菲涅耳非相干关联全息分辨率的影响*
2019-04-10 02:45潮兴兵潘鲁平王子圣杨锋涛丁剑平
物理学报 2019年6期
潮兴兵 潘鲁平 王子圣 杨锋涛 丁剑平†
1) (南京大学物理学院,固体微结构国家重点实验室,南京 210093)
2) (九江学院理学院,九江 332005)
(2018 年10 月12 日收到; 2019 年1 月2 日收到修改稿)
作为复光场显微成像的一种新技术,菲涅耳非相干关联全息术(Fresnel incoherent correlation holography,FINCH)因其非相干光记录的特点在近年来受到关注. FINCH 作为一种新型非相干全息系统,如何设计光路实现其最佳的分辨率是一个关键问题. 然而,针对这个问题的讨论,目前已有文献存在不同的观点,有关FINCH 最佳分辨率的成像条件仍有待研究. 全息图有效孔径大小是决定全息成像系统分辨率的重要因素,在FINCH 系统中,全息记录距离的变化则会引起全息图有效孔径发生变化,全息图的有效孔径大小不仅与光路各元件的孔径有关,还与相干光波相互干涉叠加区域的面积以及图像传感器的像素间距等因素有关. 本文基于波动光学理论,结合FINCH 全息图的波带结构特征,研究了FINCH 全息图的有效孔径. 研究发现数字全息记录相机的像素化特性是影响FINCH 成像分辨率的决定性因素,并进一步通过数值模拟和光学实验验证了理论分析结果: 全息图记录距离(Zh)等于空间光调制器加载的衍射透镜焦距(fd)时,FINCH 系统的再现像将会达到最佳横向分辨率,且分辨率随成像距离| Zh −fd|的增大而降低.
1 引 言
对复杂三维光场信息进行定量提取并进行重构的不懈追求推动全息技术的不断发展,而高灵敏度和高分辨率数字记录技术和高性能计算技术的发展正赋予数字全息技术很强的现实可行性和极具潜力的应用前景[1−3]. 近年来在诸多数字全息方案中,Rosen 和Brooker[4]提出的一种非相干数字全息成像系统,即菲涅耳非相干关联全息术(Fresnel incoherent correlation holography,FINCH)尤其引人关注. 该系统使用空间非相干光照明,通过空间光调制器(spatial light modulator,SLM)上加载的衍射透镜产生的信号光波(对应于物点的球面波)和参考光波(平面或球面波)之间的自干涉来记录物体的复光场信息(振幅和相位),然后利用计算机对记录的数字全息图进行数字再现,可以重构物光场的三维分布,在三维显微荧光成像中有重要的应用价值[5−8].
FINCH 系统由于其重要的应用价值而成为研究热点[9−19],但仍有一个关键问题有待进一步澄清,这就是成像系统中最关心的成像分辨率. 虽然研究者们对FINCH 系统的成像分辨率有所研究,但对获得FINCH 最佳成像条件仍存在不同甚至相互矛盾的观点[14−17]. 例如,为了实现FINCH 系统的最佳横向分辨率,全息图的记录距离Zh与加载在SLM 上的衍射透镜的焦距fd需要进行合理的匹配. 有的研究认为,当Zh=0.5fd时,FINCH 系统能够实现最佳横向分辨率[14,15]. 另有研究认为,当Zh=2fd时,FINCH 系统能够实现最佳横向分辨率[16]. 也有研究指出,当Zh=fd时,FINCH 系统横向分辨率是最佳的,且在Zh>fd的情况下,该系统的横向分辨率将受准直透镜数值孔径的限制而无明显变化,这时FINCH 系统类似于传统光学成像系统的作用[17]. 我们认为这些研究组主要采用光线追踪方法来讨论全息图有效孔径的大小,忽略了光波的衍射效应以及图像传感器的像素间距大小对全息图孔径的影响,并且基于不同几何光学模型,从而得出了不同的结论.
众所周知,全息图有效孔径大小是决定全息成像系统分辨率的重要因素. FINCH 作为非相干数字全息系统,其利用信号波和参考波之间自干涉作用实现物体空间三维信息的记录,而且所记录的全息图具有菲涅耳波带片的特征. 对FINCH 系统而言,全息记录距离的变化则会引起全息图的有效孔径发生变化,而且,全息图的有效孔径大小不仅与光路各元件的孔径有关,还与相干光波相互干涉叠加区域的面积以及图像传感器的像素间距等因素有关. 我们认为正是因为FINCH 系统中记录相机的像素化效应未得到充分考虑,影响了分辨率分析结果的正确性,实际上到目前为止还未看到有关FINCH 成像分辨率受限于像素化效应的研究报道. 本文基于波动理论,结合FINCH 的非相干特性和数字全息记录特点,给出成像分辨率的一般分析. 本文研究结果表明,信号光波和参考光波干涉区域的有效记录面积是决定FINCH 成像分辨率的关键,而有效记录区域决定于图像传感器的像素参数,并随FINCH 全息图记录距离的变化而改变.我们基于波动理论和全息图的数字记录特性,导出了FINCH 全息图有效孔径的表达式,得出了获得最佳成像分辨率的全息图记录条件,并通过数值模拟和光学实验验证了本文的理论分析结果.
2 FINCH 系统的成像分析
FINCH 系统的原理示意图如图1 所示,该原理图主要包括光学记录和数字再现两个部分. 在光学记录过程中,空间非相干的单色光波照明物体后,通过准直透镜后照射到加载衍射透镜的SLM 上,SLM 衍射透镜将入射光波分束为信号光波(即受衍射透镜调制的衍射分量)和参考光波(未受调制的直流分量). 由于被SLM 分束的信号波和参考波都是来自观察面上的同一物点,即使在空间非相干光照明下,这两束光波也具有自干涉的特征,能够在图像传感器CCD 的光敏面上彼此干涉形成全息图. 数字再现过程是通过计算机数值模拟光学衍射过程,对记录的全息图进行数字再现,从而得到物点的再现像. 由于SLM 只对特定偏振方向的光波有调制作用,偏振片P1 和P2 用来控制SLM 上调制和非调制分量间的相对比例,从而控制全息图上干涉条纹的对比度.
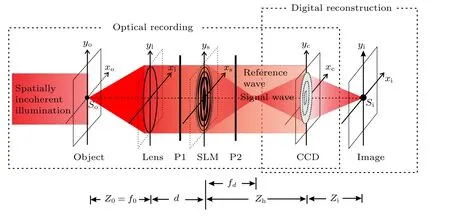
图1 FINCH 系统原理示意图(P1 和P2 为偏振片)Fig. 1. Illustration of the principle of FINCH system,where P1 and P2 are polarizers.
从点物出发分析FINCH 系统形成的全息图,并推导FINCH 系统的再现像,这个再现像实际上就是FINCH 系统的点扩散函数,其分布决定了FINCH 成像的空间分辨率. 假定物点So位于透镜前焦平面上 (x0,y0) 处,并且假设透镜孔径足够大可忽略其渐晕效应,则来自物点的光波在经过焦距为f0的透镜后成为倾斜的平面波,照射到SLM 上(xs,ys)处的光场复振幅可表示为

其中A为常数因子,λ为照明光波长. 在SLM 上加载焦距fd的衍射透镜函数

其中θj为设定的常数相位值. 由于SLM 只对某个偏振方向(为简单计,此处可假定为x方向)的入射光波有相位调制作用,而不影响对应的垂直方向振动(y方向)的光波. 因此入射光波通过SLM 后被分成两部分: 一个为受到SLM 调制而向后面距离fd处会聚的球面波,另一个为直接通过的平面波. 球面波可看作为信号光波,平面波视为参考光波,两者在CCD 平面上形成同轴全息图. SLM 出射的信号光波和参考光波可分别表示为

两者传播Zh距离后,在CCD 记录面上 (xc,yc) 处的复振幅分别为[20]

其中B和C为常数因子;SSLM代表SLM 的有效孔径;Ps(xs,ys)和Pc(xc,yc) 分别代表SLM 调制窗口的有效孔径和CCD 的有效记录孔径,即孔径内P=1 ,孔径外P=0 . CCD 记 录的FINCH 全 息图,实际是信号光波和参考光波同轴传播叠加形成的干涉图,其强度可表示为

其中φO和φR分别为信号光波和参考光波的相位因子.
为了消除同轴全息图的零级像和孪生像,可以利用相移干涉技术来记录多幅全息图,在提取出信号光波的复光场分布后,在计算机中运用数值计算获得衍射场分布,从而数字再现出物体的像. 采用θ1=0,θ2=2π/3和θ3=4π/3 的 三步相移算法,可得下式:
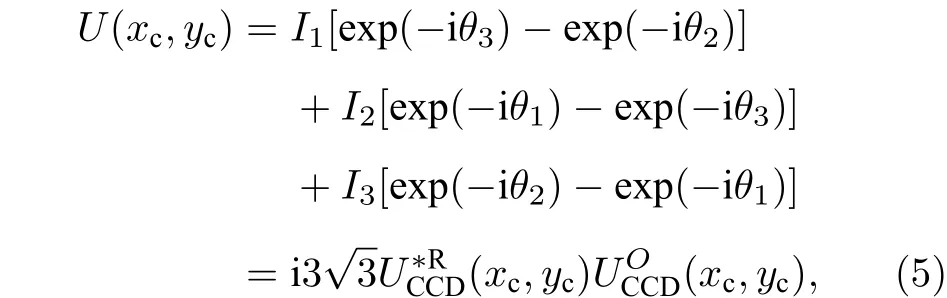
其中*表示复共轭. 由于参考光波是平面波,在(5)式中出现的(xc,yc) 实际上是常数因子. 因此(5)式代表了FINCH 全息图重建出的物光场函数,再运用数值方法计算出像平面处的衍射场(即图1 中的数字再现过程),即可再现出物体的像.
运用稳相计算方法对(2)和(3)式进行积分运算推导[21],可进一步将(5)式的物光场函数U(xc,yc)表示为

其中D为常数因子,并且


其中⊗表示二维卷积运算,而Jinc(r)=J1(r)/r( J1(r) 是第一类一阶贝塞尔函数),并且为简便计,已将其中所有常数因子都归纳于D中. (8)式中的参数Rh为全息图的有效孔径的半径,将在下节中专门讨论. (8)式表明再现的像点实际为艾里斑,像斑大小即决定了再现像的横向分辨率,像斑的坐标位置由δ(x,y) 函数决定的. 不失一般性,本文使用Jinc(r) 第一个暗环表示像斑的半径ρi,因此

此外像斑的横向坐标为xi=−Zhx0/f0,yi=−Zhy0/f0,并且再现像的横向放大率为MT=Zh/f0.
3 全息图有效孔径和再现像的横向分辨率
3.1 全息图的有效孔径
在FINCH 系统中,物点信号波和平面参考波自干涉形成的全息图类似于菲涅耳波带板的形成过程,即每个物点在CCD 上生成了各自的菲涅耳波带全息图. 而(9)式表明,FINCH 再现像斑的大小是由全息图有效孔径Rh决定,因此要分析FINCH成像分辨率,关键是如何确定FINCH 全息图的大小(即菲涅耳波带的有效形成范围)以及对其施加影响的系统参数.
作为数字全息系统,FINCH 装置中的数字器件如SLM 和CCD 对菲涅耳波带的记录有着重要的影响. 首先考虑SLM 像素化的影响: SLM 调制工作区面积和像素单元大小决定了衍射透镜的有效孔径和焦距大小. 根据傅里叶光学采样理论,衍射透镜的相位函数的局域频率最大值不能大于SLM 像素单元大小的倒数. 经过简单的分析计算可知,衍射透镜的焦距必须满足条件其中δs和Ns分别为SLM 像素单元的大小和像素的数量.
下面考虑CCD 的影响. 参考光波和物点光波在CCD 记录面上形成干涉图(即菲涅耳波带),而CCD 像素化寻址方式只能记录线度大于像素的区域. 根据菲涅耳波带理论,可以推导出FINCH 系统全息图上第n级波带的半径为[20]

像素特征决定了CCD 无法记录宽度小于像素大小的波带,即CCD 所能记录的最外环(n=N)波带宽度应为CCD 像素间距δc的大小:RN−RN−1=δc. 由此可得,CCD 所记录波带片的最外环级数为其中为第1 级波带(n=1 )的半径. 此外,考虑到(6)式中Pc和Ps形成的有效孔径R=min{Rs,Rc},可推导出CCD 所记录的全息图有效孔径Rh为

(11)式指出全息图的有效孔径Rh与成像距离|Zh−fd|以及波长λ成正比关系. 还应该指出Zh=fd时,CCD 位于SLM 加载的衍射透镜的焦平面上(即物点的像平面),此时记录的数字全息图类似于光学像面全息图[22,23].
3.2 最佳横向空间分辨率
通过(9)和(11)式,以及横向放大率关系式MT=Zh/f0,可得到FINCH 系统可分辨的最小像斑的半径ρo为

由(12)式得到了本文一个重要结论: 记录距离Zh=fd时,FINCH 系统能够分辨的像斑最小,因此Zh=fd是FINCH 实现最佳分辨率的记录条件. 在下文的数值模拟和光学实验中,将进一步验证该结论的正确性. 此外,(12)式也隐含着一个重要结论: 当|Zh−fd|逐渐减小时,波长λ对ρo影响也会逐渐降低,即不同波长导致的像斑大小的差异变小,直至Zh=fd时降到最小,从而降低了FINCH系统对照明光源的时间相干性的要求,这也是光学像面全息所具有的重要特征—允许宽光谱光源照明[24,25].
4 数值模拟和光学实验
4.1 数值模拟
本节通过数值模拟实验来验证上述关于FINCH 系统最佳分辨率的结论. 数值实验模拟的光路原理如图1 所示,假定位于透镜前焦面上长宽均为 1μm的点状物被波长λ=632.8 nm 的空间非相干光照明. 为了与后面介绍的光学实验相匹配,数值实验的其他参数设定如下: 透镜半径Rl=12.5 mm ,其焦距f0=0.12 m ; SLM 的有效半径Rs=4.32 mm ,其像素δs=8.0 μm ; CCD 的有效半径Rc=3.54 mm ,其像素δc=3.45 μm ; 物平面按 1μm间距采样成为 2 048×2048 阵列; CCD 的记录距离Zh以0.01 m 为增量从0.10 m 到1.20 m 之间 变 化; 透 镜 与SLM 间 的 距 离d=0.20 m ,SLM 上加载的衍射透镜的焦距fd=0.60 m . 采用自适应的衍射场计算算法对全息记录和再现过程进行数值模拟[26,27],该算法基于标量衍射理论和快速傅里叶变换法,能够适用于不同的衍射距离和不同的采样率. 此外,还考虑到FINCH 系统不满足相干成像系统的拉格朗日不变条件[10],即用单物点不足以准确表征系统的横向分辨率. 因此,在数值模拟中还通过分析可分辨的双物点间距来进一步确证FINCH 系统的横向分辨率.
在单物点数值模拟中,保持fd=0.60 m 不变,探讨再现像斑的半径ρo与记录距离Zh之间的相互关系,模拟结果如图2 所示. 图2(a)表明数值模拟结果(点虚线所示)与根据(12)式所得的解析结果(实线所示)是相互一致的: 当记录距离Zh趋近于衍射透镜焦距fd时,像斑半径将减小. 图2(b)显示了Zh取不同值时,再现像强度的一维分布情况,也再次表明,当Zh=fd(=0.60 m) 时,再现像斑最小.
在双物点模拟中,研究两物点的再现像斑的间隔与记录距离Zh之间的相互关系. 根据瑞利判据[20],两物点间最小可分辨的距离用ρo=0.61λ/(NAMT)来表示,式中 N A =Rs/fd为衍射透镜的数值孔径.当Rs=4.32 mm ,fd=0.60 m时,ρo近似为 1 0.7 μm .
本文分别取两物点的间距∆=9.0,10.0和11.0 μm进行对比模拟研究,且其他光路参数与前述相同,模拟结果如图3 所示. 依据瑞利准则[20],如果两个像斑之间中心凹陷超过峰值强度的27.0%左右,则两个像斑可以被分辨的. 从图3(d2)和图3(d3)可以看出,当Zh=fd=0.60 m ,两物点的间距分别为 1 0.0和 1 1.0 μm 时,可以分辨两个再现像斑; 当Zh=fd/2=0.30 m 或Zh=2fd=1.20 m 时,则两个再现像斑不可辨. 因此双物点的数值模拟实验同样证明了FINCH 系统获得最佳分辨率的条件是Zh=fd时.
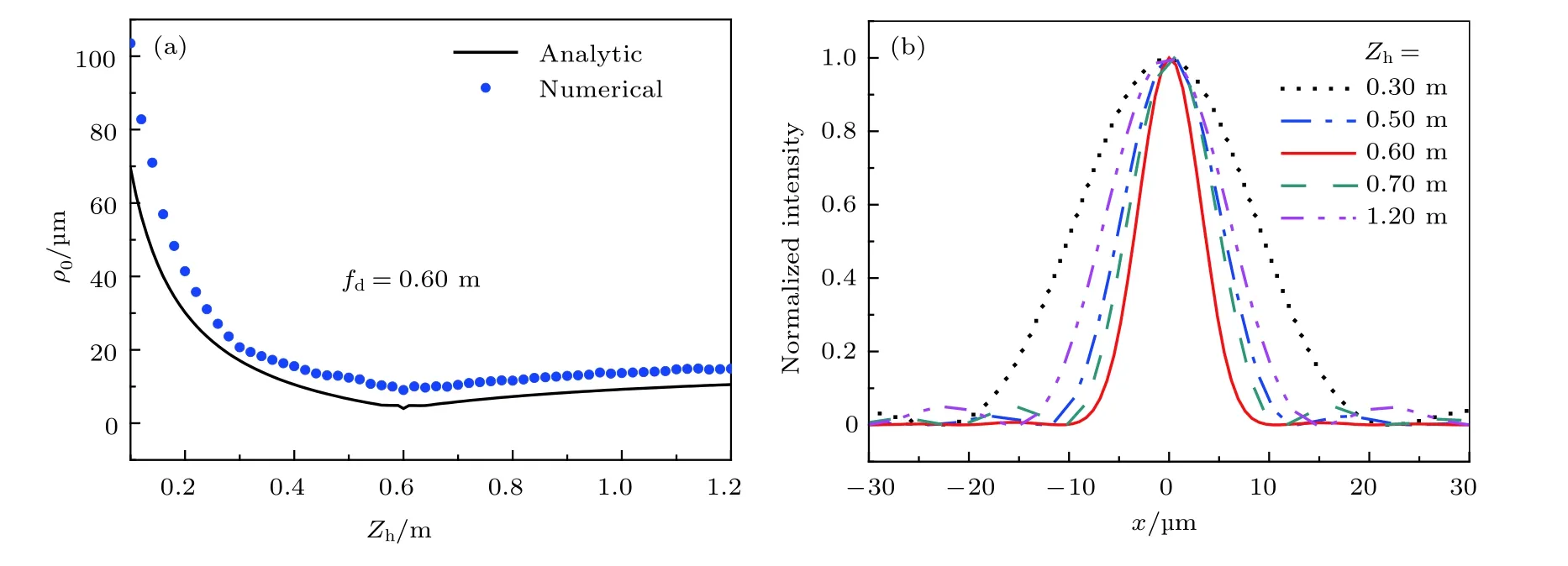
图2 可分辨物点半径ρo与Z h的相互依赖关系(f d=0.60 m) (a)可分辨像斑半径ρo 的数值模拟实验和解析计算的结果比较;(b)数值模拟的再现像斑的强度分布Fig. 2. Dependence of the radiusρo of resolvable image spot on the recording distanceZ h while keepingf d=0.60 m : (a) Comparisons between numerical simulation experiment and analytical calculation of resolvable speckle radiusρ o; (b) intensity profiles of reconstructed image spots by numerical simulation.
4.2 光学实验

图3 不同记录距离Z h (0.30 m (a),0.60 m (b)和1.20 m (c))获得的双物点再现像,其中f d =0.60 m ,双物点间距∆ 分别为9.0(第1 行),1 0.0(第2 行)和 1 1.0 μm(第3 行); (d1),(d2)和(d3)分别表示双物点间距∆ 为9.0,10.0 和 1 1.0 μm 时,再现像强度的一维分布Fig. 3. Reconstructed double images under different recording distancesZ h (0.30 m (a),0.60 m (b) and 1.20 m (c)) while keeping fd =0.60 mfor different spacing of two object points∆=9.0 μm (the first row),1 0.0 μm(the second row) and 1 1.0 μm (the third row),respectively. (d1),(d2) and (d3) One-dimensional distribution of reconstructed image intensity for∆=9.0,10.0 and 11.0 μm,respectively.

图4 FINCH 系统光学实验装置示意图Fig. 4. Schematic representation of experimental set-up of FINCH.
实施的FINCH 光学实验系统的光路如图4 所示. 准直扩束的LED 光源(Thorlabs,M625L3-C5)发射的光波经过滤波片(Thorlabs,FL632.8-3)后成为中心波长为633 nm 的窄带光,通过可变光阑后照射位于准直透镜(f0=0.12 m )前焦面处的分辨率板(Negative USAF1951). 分辨率板的透射光波通过偏振片P1 后变成线偏振光,且其偏振方向与反射型SLM (Holoeye PLUTO,阵列 1 920×1080 ,像素大小δs=8.0 μm )的主轴方向的夹角为50°. 这样入射线偏振光可被SLM 分解为与其主轴相互平行和垂直的两个分量,平行分量将被SLM 上加载的衍射透镜调制后成为信号光波,未被衍射透镜调制的垂直分量则成为参考光波. 第二个偏振片P2 使得相互正交的信号光和参考光在CCD 记录面上可以相互干涉,形成数字全息图. 采用三步相移法,用CCD 相机(Pike F-505,阵列2452×2054,像素大小δc=3.45 μm )先后依次记录了3 幅全息图. 然后根据(5) 式从3 幅全息图重构出CCD 平面处物光场的复振幅分布,进而在计算机中进行菲涅耳衍射积分计算,数字重构出像平面上的再现像(图5—图7). 在实验中,通过步进电机驱动平台(Thorlabs,LTS300)调控CCD 位置对记录距离Zh进行精确标定.
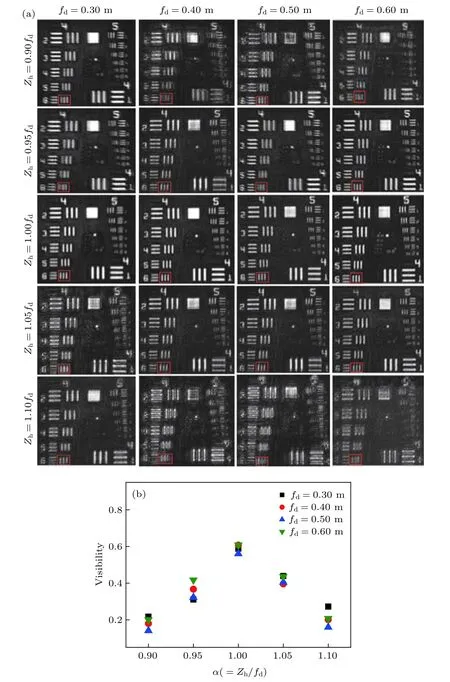
图5 (a)计算机数字再现的图像,其中对每一种衍射透镜焦距fd (分别为0.30,0.40,0.50 和0.60 m)测试了不同记录距离Zh(= 0.90f d,0.95f d,1.00f d,1.05f d ,1.10fd); (b)不同的记录距离相对值(α=Zh/fd )对应的再现像可见度Fig. 5. (a) Computer digital reconstructed images forfd =0.30,0.40,0.50 and 0.60 m,each with differentZ h (= 0.90f d,0.95fd,1.00f d,1.05fdand 1.10fd); (b) relative values of different recording distances (α=Zh/fd ) corresponding to visibility of reconstructed image.
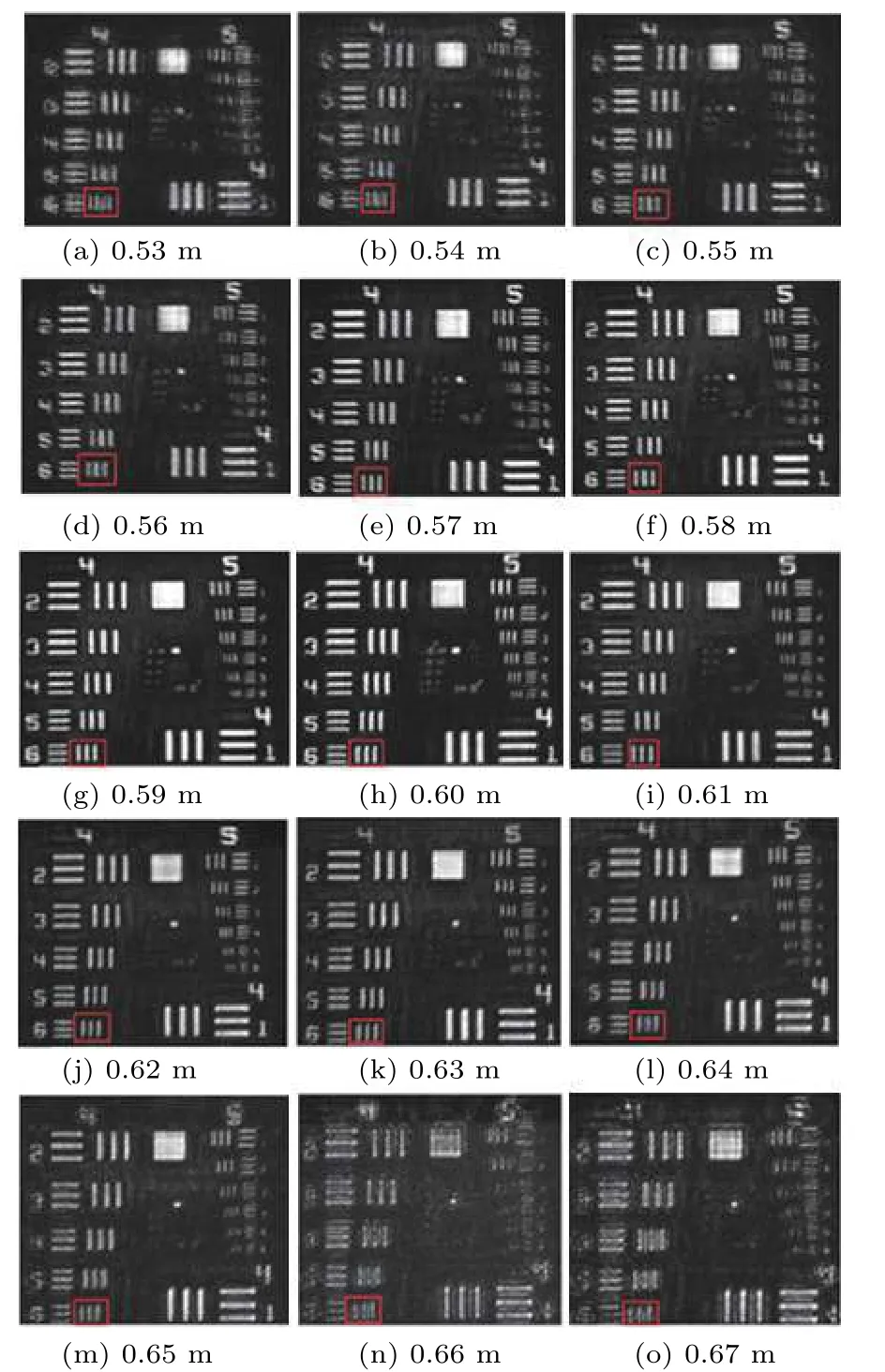
图6 (a)—(o) 再现图像的裁剪部分,f d =0.60 m ,记录距离Z h 从0.53 m 到0.67 m,红色框所标记区域的可见度将在图7 中显示Fig. 6. (a)−(o) Cropped sections of reconstructed images whenZ h varies from 0.53 m to 0.67 m whilefd =0.60 m.Visibility of the lines marked with the red box for the differentZ h will be plotted in Figure 7.

图7 不同记录距离Zh 下,图6 红色方框标示区再现像的可见度分析 (a)可见度; (b) 标示区特征线的强度分布Fig. 7. Visibility of line pattern within the regions marked with the red box in Figure 6 for the differentZ h : (a) Visibility of the line pattern; (b) intensity profile across the line pattern.
5 结 论
FINCH 系统具有的自干涉特征能够在空间非相干光照明下实现全息记录,但作为数字全息,该系统也存在着数字器件的一些固有缺点,如数字器件有限的像素数量和像素间距[28,29]将会影响全息图的成像质量. 例如,在实验中,像素间距为3.45 μm的CCD 相机只能记录空间截止频率低于300 mm−1全息图干涉条纹,而光学全息记录的空间频率可高达到 2 /λ. 此外,已有文献研究表明图像传感器像素结构的填充因子参数也对数字全息成像有着重要影响[30]: 即再现像斑(或者点扩散函数)的宽度将随填充因子的增大而增大,从而使得系统的分辨率将会降低. 该结论是针对全息函数(对应于本文中(6)式)进行分析获得的,因此也适用于本文,但不影响本文关于最佳记录距离的结论.
总之,如何利用现有的数字器件来设计最佳光路以实现最佳的分辨率是人们对新型数字全息成像系统最为关心的问题之一. 本文基于衍射理论,利用菲涅耳波带原理分析了数字器件的像素化特征对FINCH 全息图有效孔径和最佳分辨率的影响. 研究发现,当CCD 记录距离等于SLM 上加载的衍射透镜的焦距时,FINCH 再现像分辨率最高.究其原因,由于受CCD 像素间距δc的制约,当成像距离|Zh−fd|越大,FINCH 系统的全息图有效孔径角(≈Rh/|Zh−fd|)将越小,CCD 所记录的空间高频信息也越少,再现像的分辨率也会越低. 需要强调的是,尽管FINCH 系统克服了光源空间相干性的限制,但它仍然需要一定的时间相干性或准单色光照明. 理论分析研究还表明,波长对再现像斑大小的影响也在记录距离等于衍射透镜焦距时趋于最小,从而降低了FINCH 系统对照明光源的时间相干性要求,这将解决FINCH 系统存在的一个限制: 虽然允许空间非相干光记录,但仍然要求单色或准单色光. 有关FINCH 系统光场时间相干性问题的讨论,将在后续报告中发表.
综上所述,有关FINCH 系统最佳横向分辨率问题的研究,需要考虑全息图有效孔径和光场相干性等因素的综合作用. 本文的理论分析已被数值模拟和光学实验所验证,研究结果有助于加深对FINCH 成像特性的认识,有利于拓展FINCH 系统的应用.
猜你喜欢
发明与创新(2022年28期)2022-11-22
江苏科技报·E教中国(2022年5期)2022-05-11
光子学报(2022年1期)2022-02-22
中国信息化周报(2020年36期)2020-10-20
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
学苑创造·C版(2017年2期)2017-01-19
科普童话·百科探秘(2016年11期)2016-11-07
发明与创新·中学生(2015年9期)2015-09-05
科技与创新(2014年13期)2014-09-02