用多重感官来感知这个世界
2019-04-09 01:31
汽车博览 2019年4期
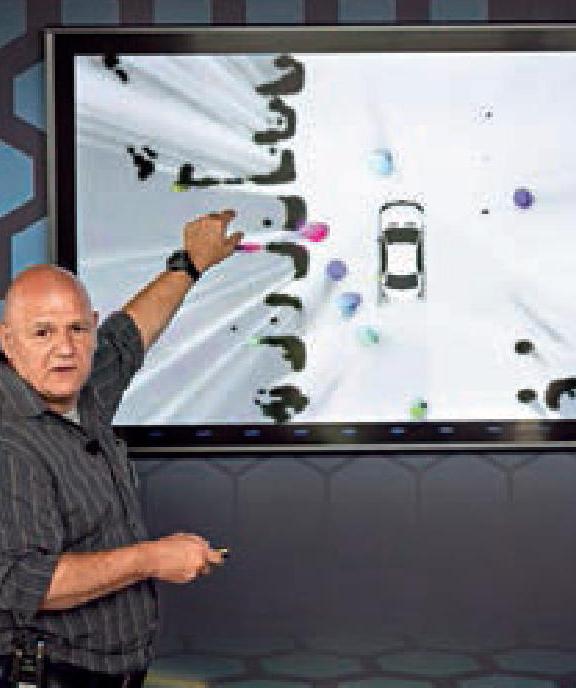
为使自动驾驶汽车能够安全抵达目的地,必须识别并区分其他道路使用者。行人移动的方式与骑行者或汽车有所不同。最初,开发人员只评估摄像头所拍摄到的图像:使用人工智能,可以实时分析环境的视频图像并对所有相关对象进行分类。人工智能显示右侧的街景,对不同的对象进行彩色标记(参见下面中间图片)。然而,与此同时,数据挖掘者也在对通过激光扫描仪获取的、更粗略的信息进行对象分类。右下图片显示了相同交通状况的360°全景视图。同样,可对不同的道路使用者进行颜色标记。甚至雷达传感器的回波标志也可通过AI算法确定对象類型。这不仅大大提高了识别率,还能确保当摄像头达到使用极限——在可见度较差的情况下,也能实现系统的基本功能。
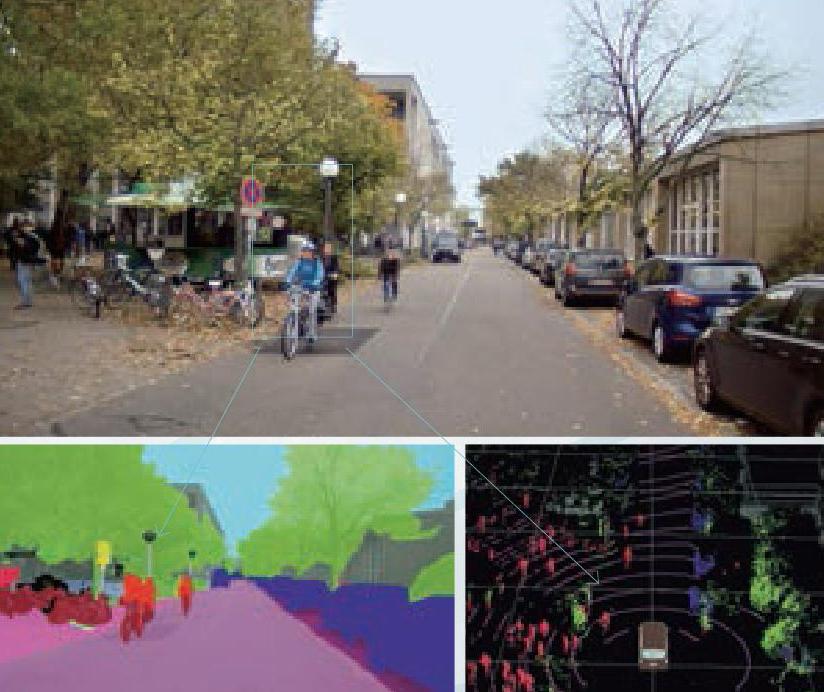
雷达系统通过车辆底部和道路之间的反射,能够“透过”前车看到周围的环境,形成一种类似 X 射线的视觉能力
摄像头识别骑车人(左)是没有问题的。相同交通状况下,激光扫描仪的360 度视图显示(右)
猜你喜欢
中国交通信息化(2019年4期)2019-07-13
非公有制企业党建(2017年10期)2017-11-03
现代兵器(2017年4期)2017-06-02
现代兵器(2017年4期)2017-06-02
商情(2016年46期)2017-03-06
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
地理教学(2015年20期)2015-12-17
现代营销·经营版(2015年3期)2015-04-20
中国交通信息化(2014年7期)2014-06-05
现代营销·经营版(2013年5期)2013-05-14