
永磁同步电机矢量控制电流环设计
2019-04-09 05:05王健健
仪器仪表用户 2019年4期
王健健
(苏州大学 机电工程学院,江苏 苏州 215006)
0 引言
随着高性能永磁材料的广泛应用,电力电子技术、微电子技术、传感器技术与控制理论的飞速发展,永磁同步电机控制系统成为研究领域的热点,要实现新能源汽车所使用的永磁同步电机稳定且高性能运行,必须要求开发出一套性能良好的永磁同步电机控制技术,目前矢量控制是最普遍、性能优良的一种控制方式。
永磁同步电机进行高性能矢量控制系统是一个包含位置环、速度环和电流环的多闭环系统,电流环作为最内环是矢量控制的基础,直接影响电机的转矩控制精度、转速精度等,并在严重情况时可能会导致系统超调甚至失调。电流环性能影响因素很多,比如电流调节器的设计、电机运行时的参数变化、功率器件的传递特性等,高性能的矢量控制必须有高性能的电流环。因此,做好永磁同步电机电流环设计工作对于永磁同步电机控制性能起着非常重要的作用。
1 dq轴动态等效电路分析及解耦
在永磁同步矢量控制中,可以将定子三相静止轴系(ABC)变换为旋转的轴系(dq),通过对dq轴上的直轴电流id和交轴电流iq的控制,也就直接控制直轴电枢反应磁场和交轴电枢反应磁场,将对电机的矢量控制转变为对定子电流的控制。定子具有了这种控制功能,就意味着可将永磁同步电机的转矩控制转换为对等效他励直流电动机的转矩控制。
图1是在旋转坐标系下永磁同步电机的动态等效电路,其d、q轴定子电压方程如下:
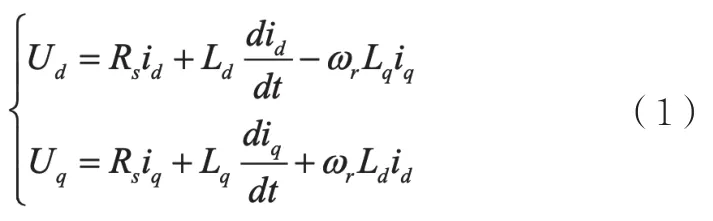
式(1)中,ud、uq、id、iq、Ld、Lq分别为dq轴上的等效电压、电流、电感,dq轴上的等效电阻为Rs,ωr为电源电角速度。
由式(1)可以看出,在同步旋转坐标系dq轴中,电流之间存在着耦合项,耦合项中包含电感参数。在实际的控制系统过程中,由于饱和效应的响应,电感参数会随着电流的变化而变化,特别是在高速动态加减载的时候,电流环急剧恶化,导致电流震荡,严重时候会导致控制发散。在这种情况下电感设定一个恒定值就无法实现电流的完全解耦,从而影响永磁同步电机的控制性能。
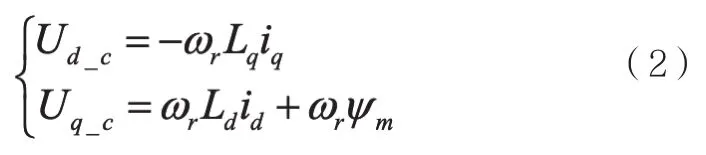
根据上述分析需要,为了提高电流环的动态响应能力,分别从d、q轴对电流环进行解耦,其耦合项分别为:
2 电流环设计
2.1 典型1型系统分析
控制系统的开环传递函数都可表示成如下:
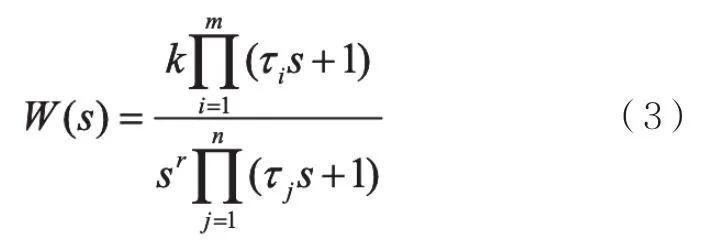
分母中的sr表示系统在s=0处有r重极点。为3或者以上的系统很难稳定,而r为0的系统稳态精度低。因此,在电机控制中,把2型系统作为速度环设计的目标,把1型系统作为电流环的设计目标。典型1型系统,其开环传递函数为:
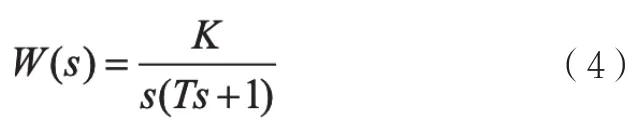
其中,T为系统的惯性时间常数,它往往是控制对象本身固有的参数,K为系统的开环增益。
2.2 电流环设计
对定子电压进行解耦得到永磁同步电机的等效结构图后就可以进行电流环的设计,在进行电流环设计时,一般可以采用零极点对消,将电流环校正成1型系统,以q轴为例介绍电流环的设计过程:
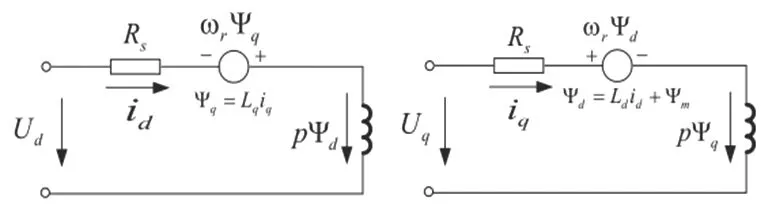
图1 永磁同步电机d-q轴动态等效电路Fig.1 Dynamic equivalent circuit of d-q axis of permanent magnet synchronous motor
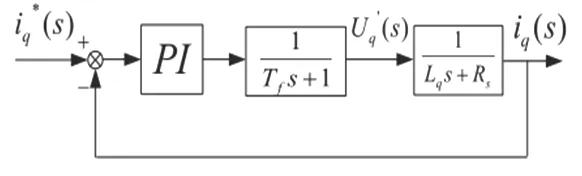
图2 q轴电流环动态结构图Fig.2 Q Axis Current ring dynamic structure diagram
图2是q轴电流环的动态结构图,其中Tf为数字控制带来的电流环等效延迟时间,1/Tfs+1为数字控制与发波的传递函数,1/Lqs+Rs为控制对象的传递函数。
在数字控制中,必须至少保证控制器的延迟时间小于被控对象时间常数,只有在这种情况下,才可能对永磁同步电机进行有效控制。因此,对电流环来说,须满足以下条件:

把电流环校正成典型1型系统,采用PI调节器,其传递函数为:

式(6)中,Kc为电流调节器的比例系数;τc为电流调节器积分时间常数。因此,选择电流调节器参数,令:

则调节器的零点对消掉了被控对象的极点,得到q轴电流环传递函数为:
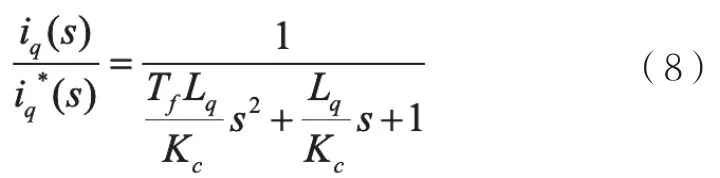
式(8)是一个典型的二阶系统,它的标准形式为:

图3 200KW电机驱动器Fig.3 200KW Motor Driver
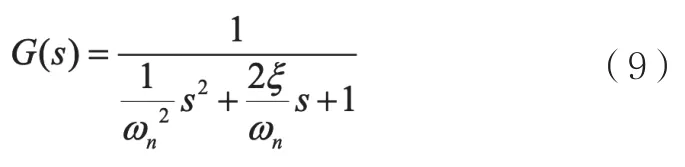
式(9)中,ξ为阻尼比,ωn为无阻尼自然振荡角频率。通过比较,可以得到式(10):
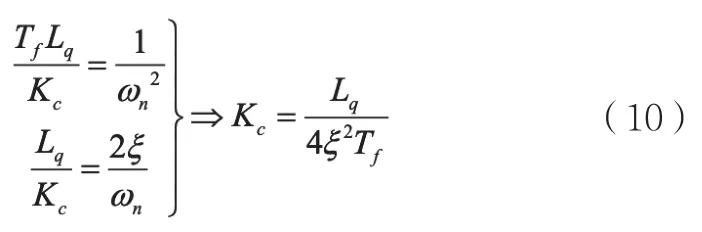
通常取ξ=0.707。至此,q轴电流环设计完成,而以上设计方法对d轴电流环也是完全适用的。因此,这里只给出d轴电流环最后的设计结果如式(11):

3 实验及结果分析
实验硬件平台使用TI公司的TMS320F28335型DSP为主控单元,驱动器功率200KW,使用500V直流供电,峰值电流500A,样机如图3所示。
实验电机为150KW峰值扭矩为1600N.m的新能源大巴车永磁同步电机,样机如图4所示。

图4 150KW永磁同步电机Fig.4 150KW Permanent magnet synchronous motor
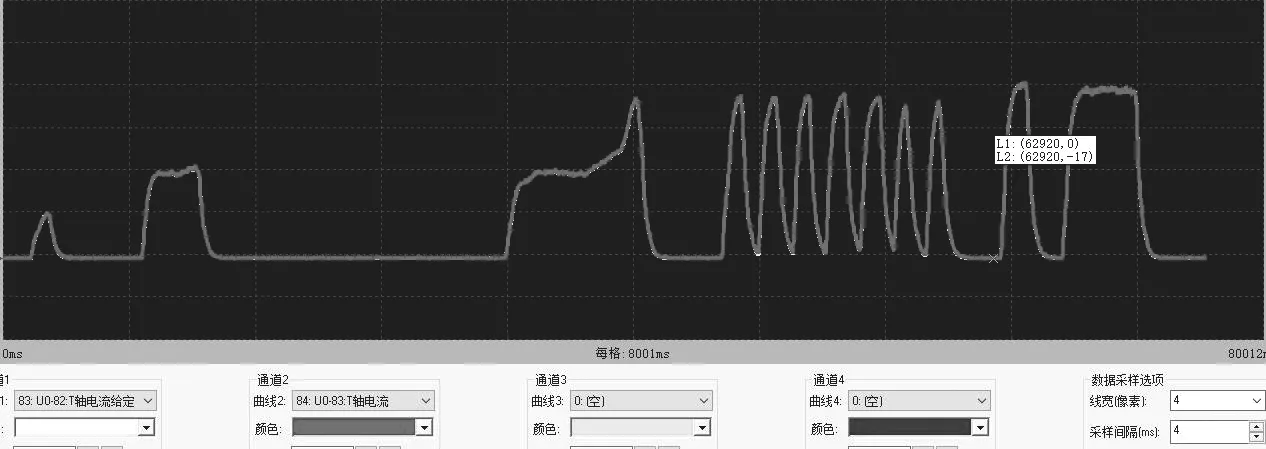
图5 根据本文电流环设计的q轴电流波形Fig.5 Q-axis current waveform designed according to current ring in this paper
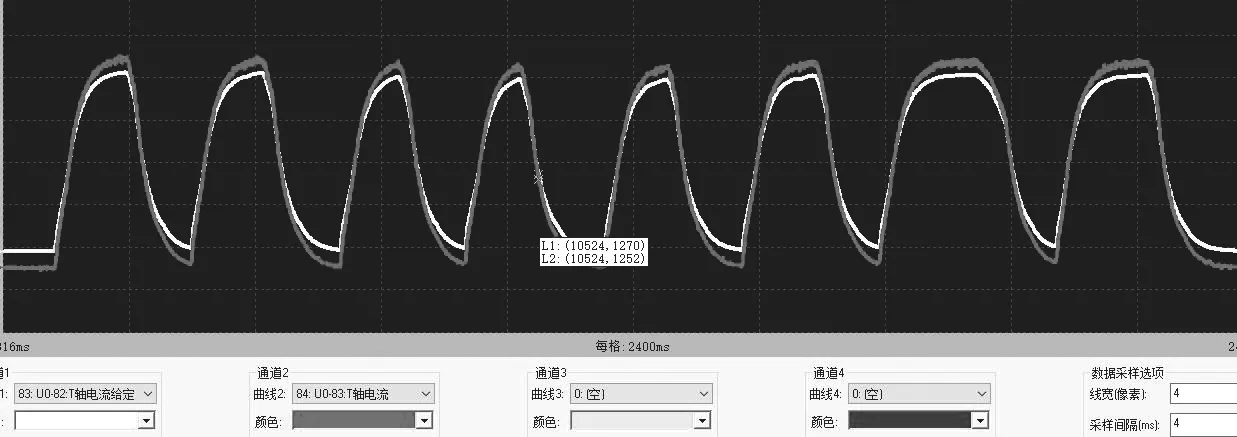
图6 没有解耦手动调节电流环参数q轴电流的波形Fig.6 No decoupling manually adjusting the waveform of the Q-axis current of the current ring parameter
实验时,当在转速达到3000rpm的时候用脚猛踩油门踏板,实现快速的加载与减载。在后台观测q轴电流的给定值与反馈值,如图5和图6所示,其中黄色为q轴电流设定值,红色为q轴电流反馈值。图5为使用本文设计的电流环参数运行曲线,其电流波动在±0.9A。图6为手动调节的效果较好的电流环参数,其电流波动在±6A。由此可见,本文设计的电流环参数效果比较理想。
4 结语
本文对永磁同步电机的电流环进行了详细分析,把电流环设计成典型1型系统,根据零点对消计算出了电流环的参数,并对计算出的参数进行了实验验证,结果显示,采用本方法计算出的电流环参数可满足永磁同步电机高性能的矢量控制。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
水泥工程(2020年4期)2020-12-18
防爆电机(2020年6期)2020-12-14
宇航计测技术(2018年3期)2018-09-08
汽车与新动力(2015年1期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车与新动力(2014年6期)2014-02-27
