
基于智能控制的锂电池快速充电方法研究
2019-04-08 01:05于少娟
太原科技大学学报 2019年2期
谷 将,于少娟
(太原科技大学 电子信息工程学院,太原 030024)
美国科学家J. A. Mas,在20世纪60年代,提出了马斯三定律[1],并迅速成为快速充电的理论基础,本文以马斯定律为理论基础对快速充电进行研究。马斯曲线表明电池对充电电流的接受能力随充电过程呈指数规律减小。因此,若要对电池进行快速充电,需要使电池可以长时间接受较大的充电电流或是在充电的整个过程中根据电池的充电状态动态调整充电电流,使之与蓄电池的可接受电流最大限度的接近。
近年来,国内外的专家、学者在充电方式和控制策略上做了很多改进:文献[2]对充电方式进行了改进,在原有三段式充电方法中引入了脉冲充电,但由于锂电池的非线性强,控制系统稳定性不高;文献[3]在系统稳定性上做了改进,但存在因“模糊化”而造成的稳态余差;文献[4]采用压降补偿的恒流充电方式,充电速度大幅度提高,但大电流在充电末期对电池造成极大损伤;文献[5]在整个充电过程中均采用脉冲充电,经研究在电池充电初期对电池采用脉冲充电并不能提高充电速度。
本文在分析上述问题的基础上,设计了基于电压降补偿的恒流-恒压快速充电法,并采用模糊自适应PID控制分别对充电系统的电压外环和电流内环进行控制,用压降补偿法和模糊自适应PID控制提高充电系统的整体充电速度和稳定性。
1 压降补偿原理
理论上判断电池充电状态的最佳参数为开路电压或者内部电动势[4]。然而,对正处于充电状态中的蓄电池这两个参数难以测量。目前,常用电池端电压近似代替电池开路电压,但电池端电压和开路电压之间存在差值,且随充电电流的增大这个差值也会变大,所以,需要通过压降补偿的方法去抵消这个差值。

图1 欧姆压降和极化压降结构图
Fig.1 Ohm voltage drop and polarization voltage drop structure
图1的结构中,R1、R2分别表示锂电池的欧姆内阻和极化内阻,其上的电压分别为Δu1、Δu2;U0表示充电瞬间电池端电压;Uf表示间歇起始瞬间电池端电压;UK表示蓄电池开路电压。
蓄电池处于充电状态时,U0=Δu1+UK,当U0=3.2 V时,实际上由于Δu1的存在,UK并未达到3.2 V,并且充电电流越大Δu1也越大,所以欧姆压降在恒流充电时影响较大。为了尽量减小电池端电压与开路电压之间的差值,本文将压降补偿法引入到快速充电方法中,用补偿电压的方法来减小这个差值。
压降补偿的核心是将电阻R1、R2上消耗的电压补偿到充电截止电压中,因此主要关心ΔU1、ΔU2,而与R1、R2的准确数值关系不大。文献[6]对影响锂电池内阻的因素做了分析,在锂电池正常工作区间内阻变化不大,且大小主要取决于电池温度,因此,可以把一定温度下电池电压降看成一个定值[7]。
图1中,如(a)所示,Δu1可由电池充电前的开路电压U0与充电瞬间端电压U0的值相减得到。在开始充电的初期,电池极化内阻很小,仅需考虑欧姆内阻的影响,随充电的进行,电池内部产生极化,极化内阻上的电压为Δu2,如(b)所示,Δu2由充电间歇开始时的端电压与间歇结束时端电压两者相减得到[8]。然后将Δu1、Δu2引入于恒流—恒压充电过程,这样便将压降补偿应用到了整个充电过程。
2 主电路的结构及控制
主充电电路结构分为前后两级,如图2,前级为电压型PWM整流电路,将电网的工频交流电压整定为稳定的直流电压;后级为Buck-Boost变换器,将前级输出的稳定直流电变换为合适的直流电对蓄电池进行充电。
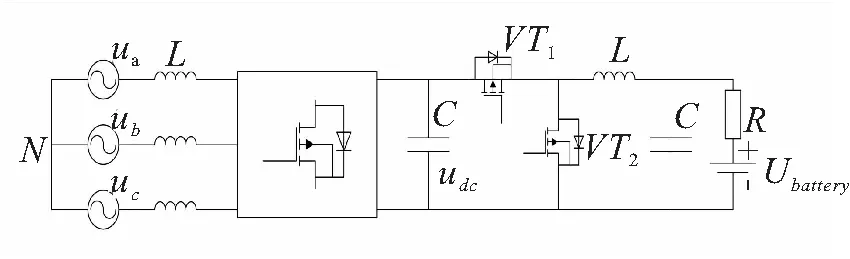
图2 两级式主电路结构图
Fig.2 Structure of two-stage main circuit
蓄电池的高效率充电依赖于对充电电路的精准控制,关键在于对PWM整流器和Buck-Boost变换器的精准控制,由于前后两级相互独立,因此可以分开单独对其进行控制。
2.1 三相PWM整流器控制策略
基于d-q坐标变换的电压、电流的双闭环控制策略和合成矢量的方法对三相电压型PWM整流器进行解耦控制,外环为电压环,内环为电流环[9]。
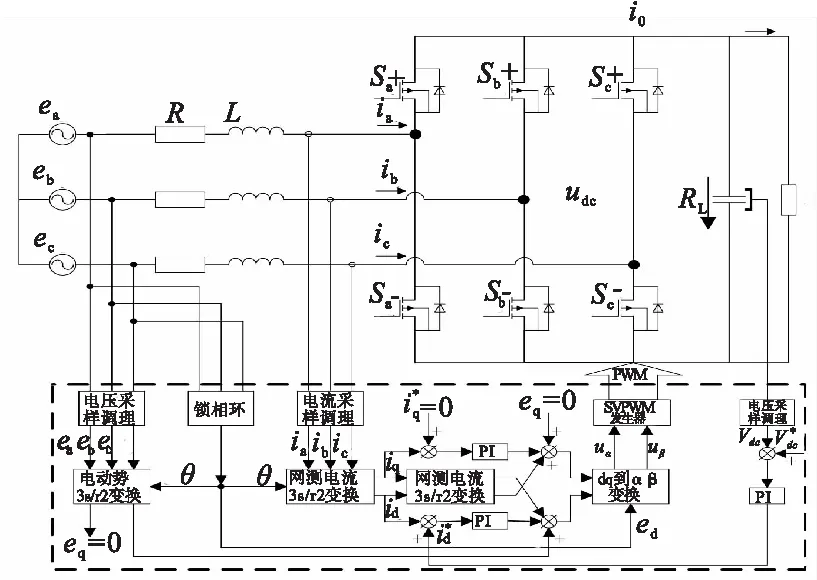
图3 PWM整流器前馈解耦控制框图
Fig.3 PWM rectifier feed-forward decoupling control block diagram
2.1.1 三相电压型 PWM 整流器的数学模型
图3上半部分为整流器结构,ea、eb、ec为交流测各相电压瞬时值;ia、ib、ic为交流测各相电流
瞬时值;udc为直流侧电压;i0为蓄电池充电电流;电阻R包含功率开关管损耗的等效电阻Rs和电感等效电阻Rc;L为电感;C为电容。
为了得到相对好的输出结果,对电压、电流采用d-q坐标变换解耦后分别对其进行控制,对开关函数的定义如下:
(1)
其中,k=a,b,c.
建立静止坐标系下三相参数对称的电压型PWM整流器数学模型如式(2):
(2)
在静止坐标系下交流侧的各相电流为时变量,传统PI控制器控制的输出静差大,稳态性能不好。为了消除静差,对式(2)进行同步旋转坐标变换,可将交流测电流量转变成直流量,PI控制器得以实现无静差跟踪,变换后得到d-q坐标系下的数学模型如式(3).
(3)
2.1.2 基于合成矢量的电流内环控制器的设计
根据d-q坐标系下PWM整流电路的数学模型和PI控制思想,设计电流内环为
(4)
电流前馈解耦后d轴、q轴的电流分量还与电感L的准确值有关,并且耦合程度还与频率呈正比,这使得控制性能不理想。为此,本文借鉴文献[10]中合成矢量的方法,把双输入双输出的网络模型转化成单输入单输出的网络模型来控制。
由静止坐标系下三相PWM整流器的数学模型,推导出α-β坐标系下基于合成矢量的数学模型,用d/dt+jω将α-β坐标系下的d/dt替换后得到d-q坐标系下基于合成矢量的数学模型:
(5)
变换到复频域后得:
(6)
将式(6)中R+jωL作为整体,只需要设计一个电流控制器可对合成矢量的解耦控制方法的电流环进行控制,控制器设计为:
(7)
(8)
把式(6)、式(8)两式代入式(7),整理得:
(9)
于是有:
(10)
将式(10)与式(4)比较,得到式(4)中的+Liq被式(10)中的ωkp(iq*iq)/s取代;ωLid被ωkp(id*id)/s取代,这样电感参数L的影响就被消除了,从而实现系统的完全解耦。

图4 同步旋转d-q坐标系下的无电感L参数解耦控制框图
Fig.4 Block diagram of decoupling control of inductance freeLparameters in synchronous rotatingd-qcoordinate system
2.1.3 整流器电压外环控制器的设计

(11)
当系统中三相正弦电压对称且不存在畸变时,q轴分量为0,有:
(12)
直流侧有功功率的为(RL表示蓄电池的内阻):
(13)
忽略掉电感等效电阻有功功率的消耗,由功率守恒有:
(14)

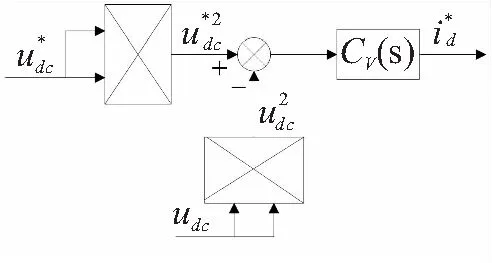
图5 整流器电压外环控制框图
Fig.5 Rectifier voltage outer ring control block diagram
由于PWM整流器一般要求在功率因数为1的单位功率下运行,即要求正常运行时q轴电流为0.因此,综合上述分析,建立控制框图如图6.
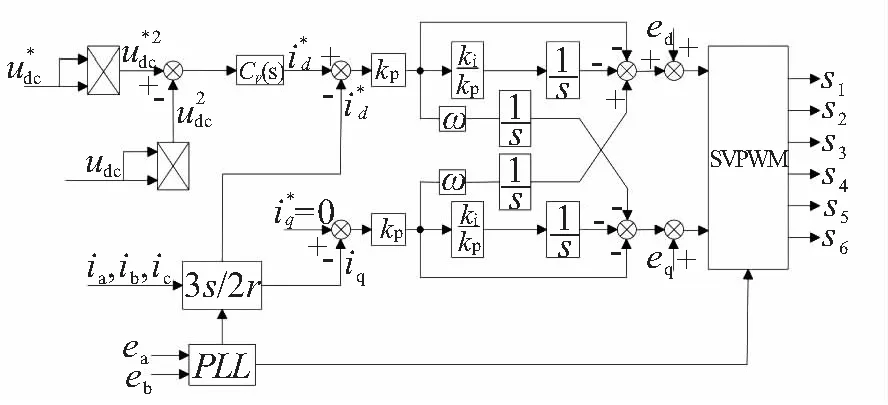
图6 整体控制策略框图
Fig.6 Block diagram of overall control strategy
2.2 Buck-Boost变换器的控制策略
针对在锂离子电池充电过程中的非线性、时变性和不确定造成系统不稳定的问题,Buck-Boost变换器采用PID控制难以解决这些问题。本文采用模糊自适应PID控制设计Buck-Boost变换器的控制器,第三部分的对比仿真中可以明显看出新控制器下的Buck-Boost变换器的输出电压和电流在稳态时的波动明显变小。由于本文主要介绍充电,因此主要针对Buck模式进行研究,Boost模式主要应用在放电模式。
2.2.1 Buck-Boost变换器数学模型
Buck-Boost变换器的结构如图7,电路工作于Buck模式时,开关管S1导通,S2关断时,满足以下等式。
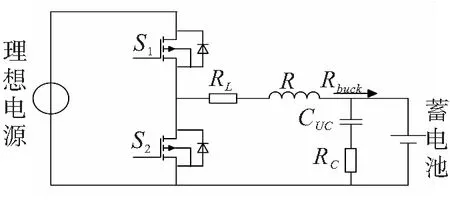
图7 Buck-Boost变换器主电路拓扑
Fig.7 Main circuit topology of Buck-Boost converter
(15)
同理,开关管S1关断,S2导通时,电路满足以下等式。
(16)
小信号分析有,
(17)
(18)
为了简化计算,实际解决问题时,通常忽略电感电阻和电容电阻的影响,从式(15)-(18)可以推出忽略电阻后的传递为
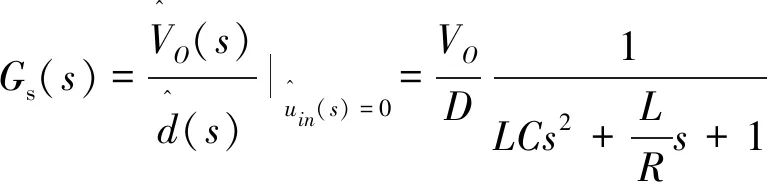
(19)

因此可以得出变换器工作于Buck模式下的等效小信号模型,如图8.
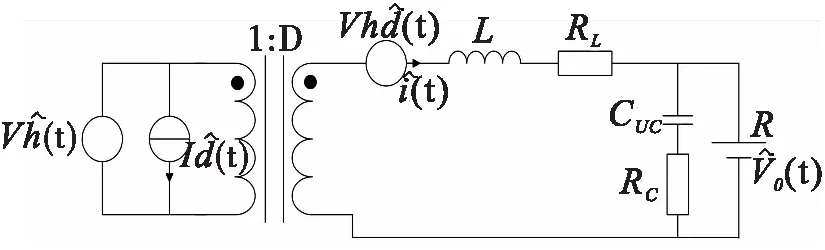
图8 Buck模式小信号模型
Fig.8 Small signal model of Buck mode
闭环系统的调节性能可以通过设计补偿环节来加以改善,Buck模式下闭环控制系统框图如图9.Gc(s)为PID控制器的传递函数;Gd(s)为PWM脉宽调制器;Gs(s)为Buck电路的传递函数;Hs(s)为电流采样反馈系数。

图9 Buck模式闭环系统框图
Fig.9 Block diagram of Buck mode closed-loop system
2.2.2 模糊自适应 PID 控制器结构设计
模糊自适应 PID 控制器是以误差e及误差变化率ec为输入变量,利用模糊规则推理得到输出Kp、Ki、Kd的调整值,在PID控制的基础上对三个进行在线调整,使充电过程中的动态和静态性能更加稳定[11]。
解模糊采用重心推理方法,推理规则选用Min法,合成规则为Max法[12],解模糊后的参数式为:
(20)
(21)
(22)

3 仿真分析
利用Matlab/simulink软件搭建完成了充电系统整体仿真。整流电路参数:输入工频380 V正弦电压,输入电感4 mH,等效阻抗0.15 Ω,直流侧电容2350 μF,电流环kp=4.48,ki=39485.08,电压环kp=4.48,ki=39485.08.图10为基于合成矢量的电流前馈解耦整流器的电压仿真波形,电压的超调量小于3 V,且在0.08 s后维持在750 V左右,上下波动在±0.5 V以内,可以为后级提供稳定电压。
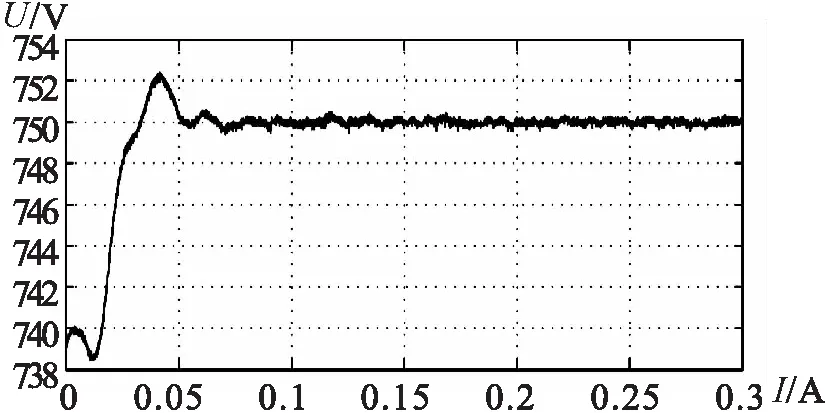
图10 电流前馈解耦的整流器仿真波形
Fig.10 PWM feedforward decoupling simulation results
Buck-Boost电路输入电压为750 V直流,Cuc=13.3F,L=780 μH,电池选用Matlab中的电池模块,设定电池类型为锂电池,容量为40AH,起始状态的SOC为60%.PID参数kp=0.116,ki=0.278,kd=0.019.模糊自适应PID与PID两种控制下Buck-Boost变换器输出的电压、电流波形的对比结果如图11.

图11 模糊自适应PID与PI控制的Buck-Boost变换器仿真对比结果
Fig.11 Results contrast of fuzzy self-adaptive PIDand PI-controlled Buck-Boost
从达到稳定的时间上看,两种控制的输出波形在0.01 s时几乎同时稳定在了设定值,但对波形图放大后,取时间在0.15-0.20 s区间的波形如图12(线的颜色与图11一样),从放大的波形图中看到PID控制的电压和电流的波动比较大,尤其是电流的波动达到了±3.5 V,而模糊自适应PID控制的电压电流波动均小于前者,稳态性能相对较高。
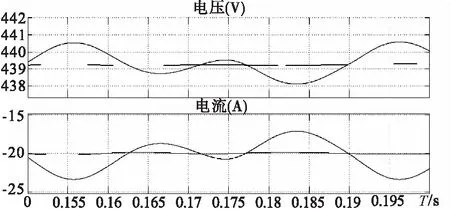
图12 电压电流控制效果对比
Fig.12 Comparison of voltage and current control effects
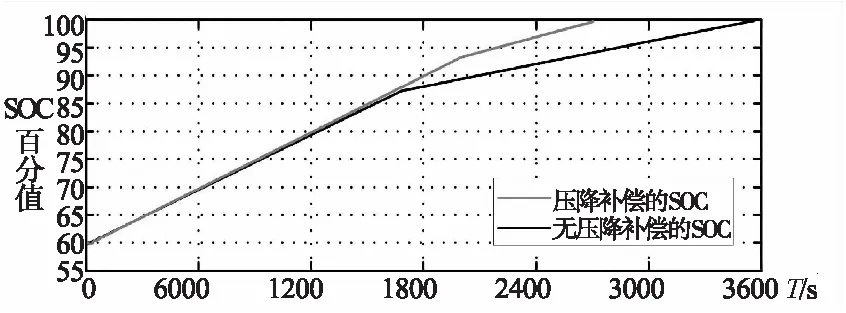
图13 引入压降补偿的快速充电与传统充电的SOC对比
Fig.13 The comparison of SOC between the fast charge of the ohmic-drop compensation and the traditional charge
整体充电仿真中,充电过程的SOC曲线如图13.图中SOC曲线的拐点为恒流充电与恒压充电的切换点,可以看出,恒流充电阶段的充电效率高于恒压充电阶段,且与无压降补偿的充电方法相比,引入压降补偿后的充电方法的恒流充电时间延长了约240 s、且恒流充电结束时的SOC比前者高5%,整体充电时间缩短840 s.
4 结 论
基于电压降补偿的快速充电系统,压降补偿法的引入有效延长了大电流恒流充电的时间,加快了整体充电速度。采用模糊自适应PID控制改进后的充电控制系统兼具模糊控制和PID控制两者的优势,操作简单且能较好处理系统的非线性、时变性和不确定性造成稳定性干扰的问题,实现了对充电系统的精准控制,有效提高了充电系统稳定性与蓄电池的充电速度。
猜你喜欢
电气技术(2022年6期)2022-06-27
电气技术(2022年6期)2022-06-27
科学家(2021年24期)2021-04-25
电加工与模具(2021年1期)2021-02-25
微电机(2019年10期)2019-12-02
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
微电机(2019年3期)2019-04-28
电子制作(2018年17期)2018-09-28
电子制作(2017年19期)2017-02-02
