
高速公路浅层隐藏缺陷的模式识别技术应用研究
2019-04-02 07:26
福建质量管理 2019年5期
(华北水利水电大学 河南 郑州 450000)
引言
自上个世纪九十年代至今,我国的高速公路建设已有近30年的发展历史,随着高速公路的日常化使用,许多高速公路逐渐进入保养维护阶段。
随着无损物探技术的发展,探地雷达检测技术在检测高速公路隐藏裂缝的检测中取得了良好的探测效果。探地雷达成像是通过反射、相干和无线电波叠加获得的地下介质的间接表征。不同类型的信号对探地雷达成像的影响有很多方面,包括直接耦合波、表面反射波、介质反射波、目标反射波和噪声波。复杂的反射波在实际工程应用中增加了检测人员专业识别的难度,通过图像处理和模式识别技术对雷达图像进行处理提取出图像目标可以提高检测速度、提高检测质量、降低检测误差。
一、探地雷达技术
探地雷达(GPR)利用高频脉冲电磁波产生周期行的脉冲信号,由雷达发射天线发射到地下,在电磁波的传播过程中遇到其他介质则会由于相对介电常数发生改变而产生反射信号。
(1)
(2)
式中:ε为介质的相对介电常数;r为两介质之间的反射系数;c是光在真空中的传播速度;式中的下表分别代表上介质、下介质。
空气的相对介电常数值为1较小,高速公路混凝土沥青路面的相对介电常数约为6~7,可见电磁波由空气介质进入到沥青介质或由沥青介质进入到空气介质时,将会发生强反射。如图1若道路中存在裂缝或者空洞等,电磁波将会被反射,雷达回波信号剖面图上将会产生明显的波动。

图1 探地雷达在缺陷处的反射信号
二、探地雷达图像预处理
在探地雷达的使用过程中由于天线直达波、地下非均匀介质产生的回波、操作不当产生的回波等探底雷达杂波严重的影响了探地雷达的探测准确度。由于浅层路面的隐藏裂缝体积小宽度窄,目标的反射回波较弱,因此抑制探底雷达杂波增强缺陷特征对接下来的特征提取尤为重要,其结果最终将影响整个系统的识别率以及执行效率。
首先将图像进行灰度化处理并进行高斯滤波从而降低图像的噪声;然后利用像素值的梯度差将缺陷的基本轮廓描绘出来;最后利用非极大值抑制的图像处理手段抑制除局部最大值之外的所有梯度值,即只保留梯度最大的部分从而减少噪声,然后通过阈值分割手段将缺陷提取出来,如图2所示。

图2 探地雷达图像预处理
由处理结果我们可以看出图像内依然存在有少许噪声,因而选择使用开运算删除二值图像中面积小于P的对象,得到如图3(a)的结果,极大的降低了图像的噪声引起的误差。通过对图像的投影曲线分析如图3(b)可以看出,统计处理过后的图像垂直投影分布以及水平投影分布可以分割出希望的目标区域的二值化结果。

图3 目标图像提取
三、特征形成
传统的探地雷达信号识别的方法主要是技术人员通过相关知识和经验对雷达图像的形状、大小、位置及检测环境作为主要辨别依据。探地雷达图像中缺陷的纹理、形状具有一定的差异,因此本文主要将裂缝和脱空缺陷的纹理、形态特征相结合来进行特征提取,特征定义如下。
(一)纹理特征(textural features)
纹理通过像素及其周围空间相邻的灰度分布来进行表述,其主要描述了图像所对应目标的表面性质。目前常用的几类研究方法主要有小波变换法、统计法、模型法等。在纹理特征统计中通过灰度共生矩阵(GLCM)以及差分统计(GLDS)中的各个值来表述图像的各个特征值。同时,我们引入自相关函数来判断图像的纹理方向和粗细度。探地雷达缺陷提取纹理特征如表1、表2所示。
灰度共生矩阵(GLCM)和差分统计法(GLDS)中的属性:
①占空比:
(1)
②对比度:
(2)
③熵:

(3)
④角度方向二阶矩:
(4)
⑤相关性:
(5)
⑥自相关函数:
ε,η>0
(6)
(二)七阶hu矩(seven invariants)
探地雷达信号的采集过程中往往会因为设备震动、操作不当等导致图像目标区域的空间变换(如:平移、尺度、旋转等)因为需要在此基础上构造出具有空间变换不变性的特征,通常应用不变矩1到7。探地雷达图像中裂缝脱空提取七个不变矩的结果如表3所示。

表1 裂缝和脱空灰度共生矩阵特征

表2 裂缝和脱空差分统计矩阵特征

表3 七阶hu矩特征
四、基于支持向量机(SVM)的公路隐含裂缝图像识别
(一)SVM的基本理论
支持向量机(support vector machine)是一种基于有监督学习的二分类模型算法,该模型的基本工作原理为寻找一个使两种样本在该超平面下边缘距离最大的最优分类超平面,边缘距离越大两类样本就分的越开,分类的结果越好。该超平面的方程为:
ωTx+b=0
(5.1)
式子中:ω=(w1;w2;...wd)是该超平面的法向量,决定超平面的角度;b为位移项。
使用核函数目的为了使样本在特征空间内现行可分,特征空间的好坏几乎决定着SVM的整个性能。然而在不知道特征映射的形式时,何种核函数合适也无法被知晓,核函数只是隐式的定义了该特征空间。因为核函数的选择成为了SVM的最大影响因素。
表4展示出了几类常见κ=(·,·)

表4 SVM常用的κ函数
除了直接使用以上核函数外,我们还可以通过函数组合来得到
·如果κ1与κ2都是核函数,那么对于正数γ1、γ2,线性组合的结果,
γ1κ1+γ2κ2
也是一个核函数。
·如果κ1与κ2都是核函数,那么两个核的直积,
κ1⊗κ2(x,z)=κ1(x,z)κ2(x,z)
可以组合为一个核函数。
·如果κ1是核函数,那么对于任意的函数g(x,z),
κ(x,z)=g(x)κ1(x,z)g(z)
同样也可以看成一个核函数。
在实验过程中我们选择使用常用的5种核作为测试核,对每一种核进行测试,得出测试结果。
(二)SVM对缺陷识别的分类应用
本实验共计768个样本,其中80%的样本作为学习样本,剩余20%作为测试样本,采用网格迭代的方式,因为Gaussian核函数可以处理分类标注与分类属性之间非线性的关系,同时线性核函数又是Gaussian核函数的特殊形式,因此我们分别对Gaussian 核函数、Sigmoid核函数进行网格遍历,通过交叉验证5的正确率来估计模型的正确率。
采用网格迭代算法首先设置超参数g和c的范围是log2g(-14,1)、log2c(-5,15),每次迭代的步长为2,分别对则可以得到一下结果。如图4所示:
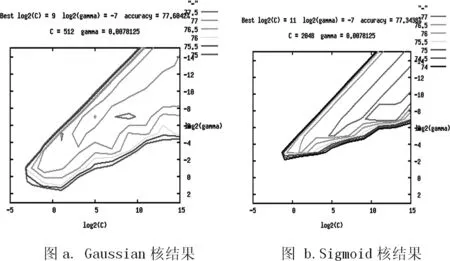
图4 不同核函数分类结果
可得出以Gaussian为核函数的SVM模型的超参数范围是log2g(-8,-6)、log2c(6,11);以Sigmoid核函数进行网格迭代的超参数范围log2g(-11,-6)、log2c(9,15)因此,缩小每次迭代的步距(step=0.1)并对该范围内的超参数进一步的缩小范围,可以得到如下结果,图5所示:

图5 进一步筛选超参数
由此可得Gaussian核超参数log2g=-6.4、log2c=9.40时模型的交叉检验5的正确率最高为78.00%,Sigmoid核超参数log2g=-7.60、log2c=14.40时模型的交叉检验5的正确率最高为77.47%。
五、结论
本文先将高速公路隐藏缺陷在探地雷达中的图像提取出来;并利用七阶hu矩、傅里叶形状描述符、占空比作为特征值建立数据集;利用支持向量机算法的分类功能将不同类型的缺陷进行分类,通过网格迭代算法筛选出最适合本数据集的核函数、超参数;通过实地的取芯检测与模拟结果进行对比,证明出本算法能够满足高速公路隐藏缺陷的快速识别。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
数学年刊A辑(中文版)(2021年3期)2021-11-05
数学年刊A辑(中文版)(2021年2期)2021-07-17
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
软件(2020年3期)2020-04-20
数学物理学报(2019年1期)2019-03-21
摄影之友(影像视觉)(2018年12期)2019-01-28
通信电源技术(2018年3期)2018-06-26
重庆工商大学学报(自然科学版)(2018年3期)2018-05-11
