一种低成本的分布式光纤周界预警系统
2019-03-28 05:34:06叶贯宇
仪表技术与传感器 2019年2期
叶贯宇,江 毅
(北京理工大学光电学院,北京 100081)
0 引言
Φ-OTDR即相位敏感型光时域反射计,由传统的OTDR技术发展而来[1],因其对相位的敏感性而具有对振动信号进行探测和定位的能力,因而广泛应用于石油化工管道等领域的安防预警[2]。基于其技术发展而来的DAS系统,即分布式声学传感系统在精度、灵敏度、分辨率上进行了改进,能够对扰动的幅度、频率、位置进行更为精确的测量,将应用范围扩展到了地震波监测、水听器等对传感系统要求更高的领域[3-5]。相较于传统的电学周界预警系统,Φ-OTDR技术具有抗电磁干扰、抗腐蚀环境、更安全和易于分布式等优势[6];相较于基于干涉效应的光纤传感器又具有实时性好、多点探测的优势,因而在周界安防领域具有良好的市场前景。本文针对这些需求,结合成本的考虑,提出一种低成本的应用于周界安防预警的Φ-OTDR系统,该系统具有良好的实时性和便携性,能够实现多点同时探测。
1 系统结构及基本原理
系统结构如图1所示,由激光器、环形器、光缆、光电探测器、采集卡和计算机组成。激光器将一定频率和脉宽的光脉冲通过环形器注入传感光纤,光在光纤中传播过程中,产生的背向瑞利散射光经由环形器输出,由光电探测器接收并将光信号转换为电信号,采集卡接收转换为数字信号供后续处理。光电探测器接收的实际上是光脉冲扫过的脉冲宽度内的背向瑞利散射信号相干叠加的结果[7],因而当有外界扰动时,引起该处光纤的形变和折射率的变化,进而导致光程差的变化,使探测器接收到的信号强度发生变化,通过对强度变化的检测以实现对外界扰动进行定位和判断。
相较于传统的OTDR系统,Φ-OTDR采用的是窄线宽激光器,相干时间必须满足不小于脉冲宽度的条件[8],如式(1)所示。
(1)
式中:τ为脉冲宽度;Δt为相干时间。
实验选取脉宽τ=200 ns,即光源的线宽满足:Δν≤5 MHz或Δλ≤4×10-5nm。
光源选取蝶形封装的DFB激光器,线宽为3 MHz,输出功率为10 mW,中心波长为1 550.12 nm。在传统的Φ-OTDR方案中,通常采用外调制的方式产生光脉冲,通过声光调制器(AOM)或电光调制器(EOM)将连续光调制成一定脉宽的脉冲光,再使用掺饵光纤放大器(EDFA)放大功率,带通滤波器(BPF)滤除自发辐射(ASE)噪声。这种方案的优点是功率大,消光比高,光束质量好,不会引起线宽展宽,但是加大了系统的复杂程度,增加了成本。而采用控制注入电流的内调制方式,可以使激光器直接输出脉冲光,结构简单,低成本且易于小型化。实验中采用与非、或非门构造单稳态触发器,实现对输入方波的任意占空比的方波变换,再配合场效应管构成的开关电路对激光器的注入电流进行调制,调节电路参数使得DFB输出200 ns脉宽光脉冲。同时,使用温控电路来提高激光器的稳定性。
脉冲的重复频率的选择与传感距离相关,必须满足上一个光脉冲在光纤尾端的菲涅尔反射回到环形器后,下一个光脉冲才可以发出。否则前后两个脉冲的背向瑞利散射曲线出现混叠,系统将无法定位。即周期T必需满足式(2):
(2)
式中:T为脉冲周期;L为光纤长度;v为光纤中光速。
实验采用长2 km,波长1 550 nm的单模通讯光缆,因而最大重频f为50 kHz,实验采用10 kHz的重频,满足条件。使用单路InGaAs雪崩光电探测器对微弱的背向瑞利散射信号进行快速探测;考虑到2×2耦合器会引入6 dB的本证损耗,降低信号功率,使用损耗小于1 dB的环形器传输光脉冲和接收散射信号。同步信号由信号发生器产生重复频率为10 kHz,占空比为0.5的方波信号,背向瑞利散射信号由采集卡采集并传输至计算机,最大采样率为20 MSPS,代表每个点之间间距为5 m,因此2 km的光纤对应采集的总点数为400。
2 信号的采集、处理与实验
2.1 信号的同步采集
采用同步采集的方式,其原理如图1所示。由信号发生器产生一定重频的方波信号,该信号的上升沿触发内调制电路驱动激光器,并同时触发采集卡开始采集。这样采集卡从第一个点开始采集的就是由光脉冲产生的背向瑞利散射信号,以实现发射脉冲和接收脉冲的同步进行。同步采集可以保证准确地提取出每一次光脉冲产生的背向瑞利散射信号,同时也能避免重频不稳引入的误差,而通过判断光纤两端的菲涅尔反射峰来提取散射信号的方案则会因为阈值判断的误差引起菲涅尔峰判断不准确而导致提取的信号缺失或者引入噪声。
2.2 信号处理及实验结果
使用LabVIEW进行简单的数据处理。采用数字平均的方式对提取的散射信号进行处理,将多个光脉冲产生的散射信号累加并除以累加次数,该方案可以明显提高信噪比并还原出淹没在噪声中的散射信号[9]。相较于移动平均的方案,数字平均计算量小,系统效率高且实时性更好。将每10 000条背向瑞利散射曲线累加后平均,并将相邻两条曲线做差,提取出强度变化曲线,实验中每1.3 s刷新1次差值曲线。将室内光缆每隔10 m绕1个环并标定距离,绕出1.2 km供测试用,拍动已知位置的环,观测差值曲线的变化。
在300 m处拍动,得到如图2所示的差值曲线,在点67处有最大尖峰,对应距离335 m,误差为35 m,SNR为12 dB。
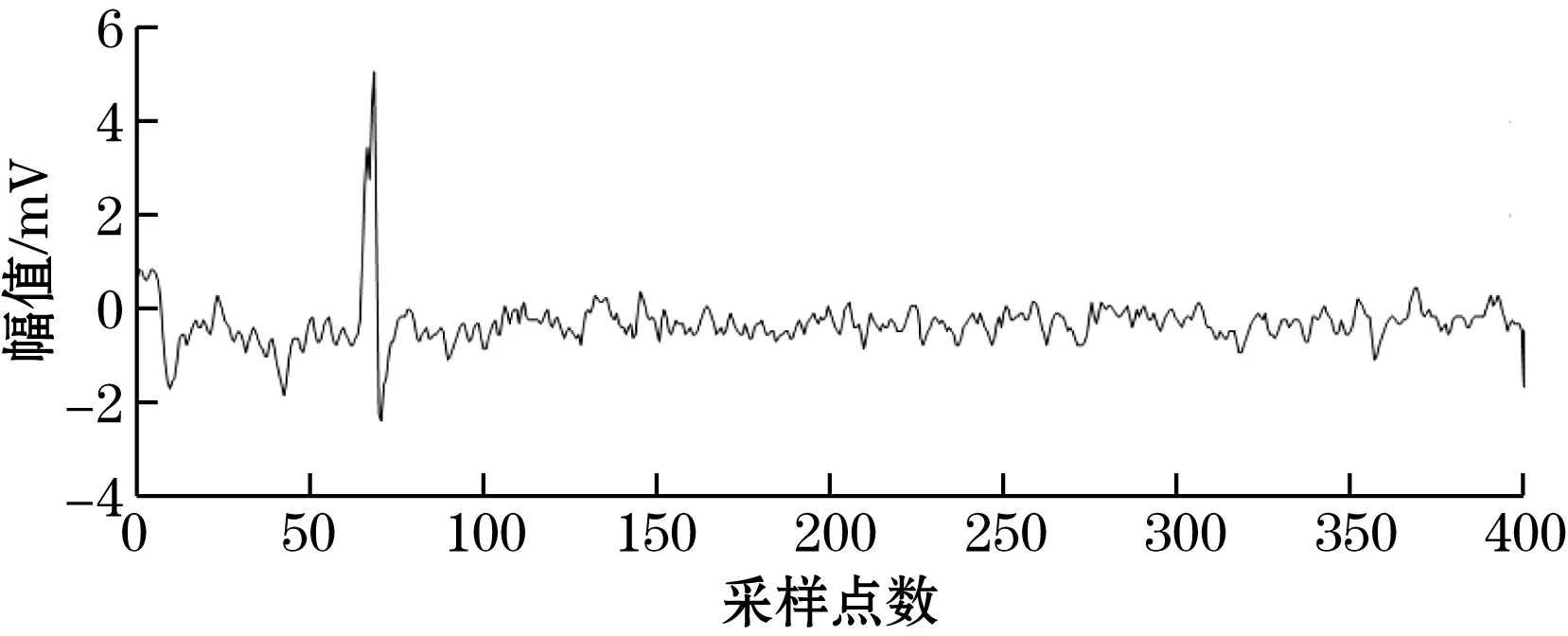
图2 在300 m处拍动后系统的差值曲线
在500 m和1 000 m同时拍动时,得到如图3所示的差值曲线,105点和205点处出现尖峰,对应实际距离为525 m和1 025m,误差为25 m,500 m处信噪比为11.7 dB,1 000 m处信噪比为10.2 dB。
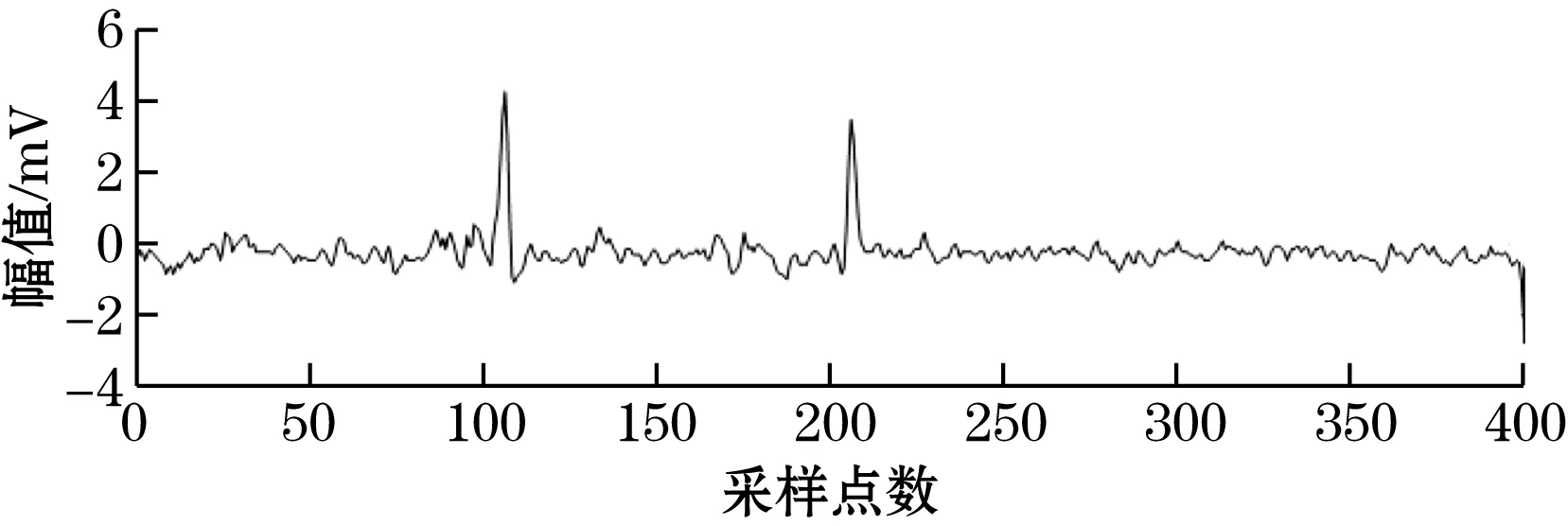
图3 在500 m和1 000 m同时拍动后系统的差值曲线
在1 000 m处重复试验20次,得到最大测量误差为60 m,平均误差为32.25 m。将另一捆同样的光缆绕出1.2 km,同样也是10 m一个环并标定距离,放置室外对室内条件进行对比。分别测量20组两种条件下的均值噪声,由于外界环境的干扰,室外条件下噪声较大,该组数据中,室内噪声均值为0.41 mV,而室外噪声均值为0.62 mV,对500 m处多次测量的SNR约为8.5 dB。由于存在大风吹刮等外界扰动导致差值曲线可能出现类似人为拍动的尖峰,因此需要设置一个阈值用来区分人为拍动和外界干扰。
一个单阈值判断的原理如图4所示,由于光脉冲注入环形器和从传感光纤尾端输出会产生幅值较大的菲涅尔反射,因此将得到的差值信号去掉末尾和开头的菲涅尔反射峰的差值部分,再取绝对值并取平均值作为基准噪声,然后设置一个阈值系数,当差值曲线某处强度的绝对值大于阈值系数与基准噪声的乘积时,认为该点发生了扰动,并输出扰动位置。

图4 单阈值判断扰动位置的原理图
阈值系数需要根据具体情况而定,设置过低则会导致误报,设置过高则会导致漏报。在室内环境下,干扰较弱,信噪比较高,导致误报的干扰可能性小,将阈值系数设置为4~8。室外环境干扰较大,噪声均值较大,存在导致误报的外界干扰,将阈值系数设为4~5.5。
3 系统的优化方案
3.1 FPGA与采样芯片作为采集模块
为了进一步降低系统成本,提高便携性,采用FPGA加上采样芯片的方式代替信号发生器和采集卡。使用EP4CE30F23C7和采样芯片AD9226共同构成采集模块。
由FPGA产生的重频10 kHz,脉宽60 ns的脉冲同时控制芯片采集和激光器的内调制电路,实现发射光脉冲和数据采集的同步。芯片的采样率为50 MS/s,对应2 km的光缆则需要采集1 000个点,设置每次发射光脉冲后采集1 024个点。将1 024个采集的数据存入fifo中,每次得到的1 024个数据都和上一组的进行累加,总共采集8192组数据的累加,之后将数据通过USB通信发送给计算机,由后续程序进行平均和做差。该方案下每0.8 s即可以刷新一遍差值曲线,具有良好的实时性。不同的传感距离对应不同的采样点数,而不同的实验环境也需求不同的平均次数,因而将采样点数和累加次数两个参数设置为可在电脑上调整,更改后的参数可由USB传输给FPGA以实现对采集模块的调整。
3.2 差值曲线取相对值
由于外界环境导致系统噪声增加,SNR降低,采用对差值曲线取相对值的方式降低外界环境的干扰。设前10 000条散射曲线平均后为曲线a,后10 000条散射曲线平均后为曲线b,用(a-b)/a对差值曲线取相对值。对500 m处位置进行20次拍动的对比实验,每次拍动相隔20 s以保证每次实验时系统已经达到稳定,记录尖峰的最大值处的SNR,对比两种方案SNR的情况。原始方案中的SNR为7.84 dB,相对值方案的为8.62 dB,后者使SNR提高了0.78 dB,由于光功率的限制,初始信噪比不高,如果可以提高光功率则该方案对信噪比的提升效果会更好。
3.3 双阈值判断扰动位置
当差值曲线的尖峰两侧最小值存在负值时,取绝对值的方式会削去该尖峰的下半部分,可能会导致系统的漏报,对单阈值判断扰动位置进行改良,提出双重阈值法,如图5所示。
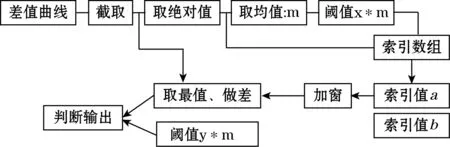
图5 双阈值判断扰动位置的原理图
首先设置一个初始阈值系数x,由x决定的阈值对绝对值后的曲线第一次比较判断,得到一系列索引值的索引数组;再以每一个索引值为中心,前后共n个点设置一个窗口,用该窗口截取原始的差值曲线,将得到的数组取出最大值与最小值,两值之差再与第二个阈值系数y决定的阈值比较,如果大于该阈值,则输出位置,否则舍弃。这样通过设置一个小阈值x得到一组可能为扰动的点,再设置一个大一点的阈值和窗口二次判断,可以避免单纯取绝对值造成漏报的情况。双阈值法的LabVIEW实现过程如图6所示。
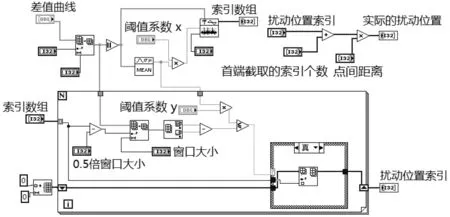
图6 双阈值法的LabVIEW实现
由阈值系数x输出的索引数组通过for循环依次筛选,由第二个阈值系数y判断输出符合条件的扰动位置的索引,最后将各索引值加上开头截取的部分得到实际扰动位置的索引值,乘以每个点代表的空间距离,输出扰动点的实际位置。
双重阈值法虽然可以有效改善单阈值系数设置过高或过低造成的系统漏报或误报的情况,但该方案会增加计算量,影响系统实时性,所以需要对低阈值系数x和窗口大小n进行合理地设置。实验中将双阈值法的系数x设置为3.5,y设置为5,窗口大小n设置为11,单阈值方案的阈值系数设置为5,对500 m处进行20次拍动测试,将误差60 m内都认为是正确预警,前后2次拍动相隔20 s,以保证每次实验时系统都已达到稳定,对比两种阈值方案的漏报情况。将对比试验重复10次,得到的平均漏报率为15%,加窗口方案为8%。对该方案的参数进行合理的优化和设置,漏报情况改善效果会更好。
4 结束语
结合民用市场对监测系统的需求,文中提出的分布式光纤周界预警系能够实现多个入侵位置的同时探测,系统具有成本低,便携、实时性好,信噪比高和漏报率低的特点。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
高师理科学刊(2020年2期)2020-11-26 06:01:32
电脑知识与技术(2019年24期)2019-11-03 13:11:42
数学物理学报(2019年4期)2019-10-10 02:38:56
成都信息工程大学学报(2018年2期)2018-06-27 08:22:22
中成药(2017年6期)2017-06-13 07:30:35
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
电源技术(2015年11期)2015-08-22 08:50:38
光学仪器(2015年2期)2015-05-20 04:56:53
佛山陶瓷(2014年1期)2014-08-08 16:30:03