
微角锥棱镜阵列在逆向调制激光通信中的应用
2019-03-27 08:32陈少钦杨国伟毕美华李长盈耿虎军
无线电工程 2019年4期
陈少钦,杨国伟,毕美华,李长盈,李 晶,李 娜,耿虎军
(1.杭州电子科技大学 通信工程学院,浙江 杭州 310018; 2.中国电子科技集团公司航天信息应用技术重点实验室,河北 石家庄050081)
0 引言
传统的FSO系统链路两端需要装载激光发射/接收系统和复杂的跟踪捕获(ATP)系统,具有较高速率、安全性高,无需链路许可证等优势。但传统FSO系统的重量、体积和功耗等是限制FSO技术发展的重要因素[1-2]。MRR FSO系统是将传统FSO系统中的一个终端替换成MRR端构成的非对称FSO系统,免去了FSO链路中一个终端激光发射器和ATP系统,并具备双工模式[3]。其中,MRR模块通常由光调制器和无源逆向反射器2部分组成。光调制器经过多年的发展,目前,主要有基于液晶光开关(LC)、微机电系统(MEMS)、多量子肼(MQW)和压电陶瓷(PZT)的光调制器[4-5]。目前,较为常用的逆向反射器是角锥棱镜(CCR)和猫眼反射器(CER)[6],由低功耗的光调制器和相应逆向反射器构成的MRR FSO系统充分利用MRR的逆向反射特性,使得MRR端具有无需激光器和复杂的ATP系统、尺寸小、功耗低及结构稳定等优点。
到目前为止的大量工作验证了MRR FSO系统在多种应用环境中的可行性和稳定性,更加明确了MRR FSO系统的广泛应用前景[7-8]。但对于自由空间光通信而言,光束在大气中传输时易受到大气湍流的影响[9-10],大气湍流效应导致传输光束波前随机起伏,造成光斑漂移、强度闪烁,大气湍流效应导致MRR FSO系统链路性能恶化,严重地影响通信系统的稳定性和可靠性[11-12]。为了提升通信链路信号传输质量,加大传输距离,采用微角锥棱镜阵列(MCCRAs)来代替MRR FSO系统中的CCR[13]。微角锥棱镜阵列的伪相位共轭特性可以用来提供波前补偿效果,可以较好地抵抗大气湍流效应对通信链路的影响。
重点研究工作是将单个大尺寸反射器(角锥棱镜)和多个微型尺寸反射器组成的反射器(微角锥棱镜阵列)应用在MRR FSO系统中,通过仿真分析和实验对比,研究了在减弱大气湍流对FSO通信性能和质量造成影响的情况下MCCRAs的作用。通过将微角锥棱镜阵列应用在MRR FSO系统的实验结果,为最终实现星地间MRR FSO通信做好前期技术准备。
1 MCCRAs的工作原理
1. 1 角锥棱镜的基本光学原理
CCR器件的基本构造原理和光学特性已经被广泛研究[14],同时关于它的反射特性已经建立了一些几何模型[15]。如图1所示,一个CCR由3个互相垂直的反射平面组成,进入CCR底面的入射光线依次经过3个垂直平面的反射后以相反于入射光线的方向射出。正是因为CCR的这一特性,该器件被广泛用作MRR FSO系统的MRR端无源反射光器件。
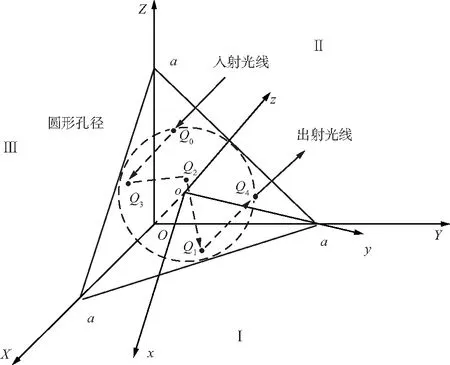
图1 CCR的内部光线轨迹
1. 2 微角反射器阵列的波前补偿原理
正如文献[16]所述一系列CCR晶胞组成了MCCRAs,不同类型的CCR晶胞可以构成不同的MCCRAs。由完全相同的角反射器晶胞规律排布在z=0的平面上构成的阵列为一致性阵列,而组成阵列的晶胞并非完全一致,更具一般性的、带有加工误差的阵列模型被称为非一致性阵列,这种误差会导致出射光线的相移和强度误差。MCCRAs的波前补偿效果如图2所示。
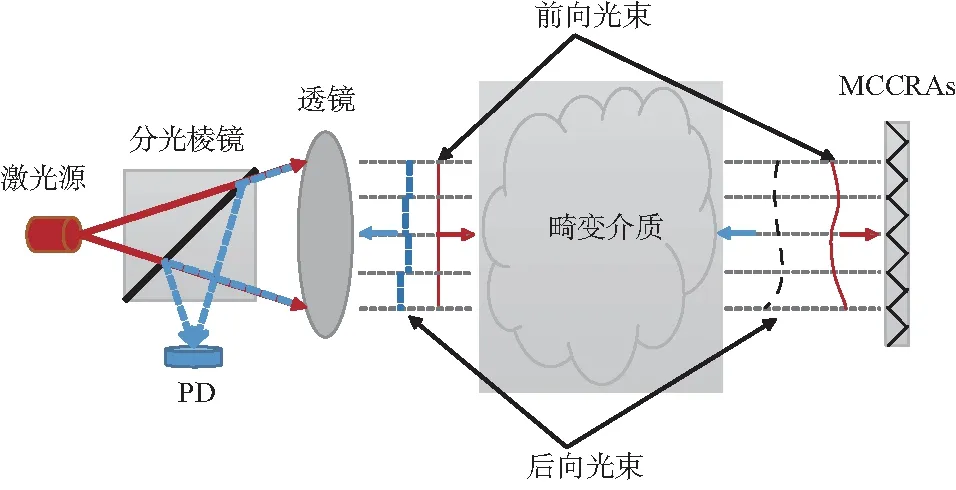
图2 MCCRAs的波前补偿效果
被阵列反射的光波等相位面可以近似为一系列直线段。伪相位共轭光波回射至畸变介质,这个过程补偿了之前的倾斜误差。这个平衡效果在一些光学畸变十分严重的特定场合十分有效,如大气湍流或者玻璃介质中。为简单起见,考虑一致性阵列,假设入射光线进入畸变介质之前是平面波,所以相应的表达式为:
Eix,y=Ax,y{expiωt-kz+c.c.},
(1)
式中,Ax,y代表光线的幅度;ω为信号频率;k=2π/λ为波数;c.c.为共轭复数。可以得到经过畸变介质的光线表达式为:
(2)
式中,φx,y是由畸变介质造成的附加相位,根据MCCRAs的特性,可以得到反射后的光线:
ωt-kz+c.c.}。
(3)
如果场幅度在横向和纵向上没有变化,即意味着dA/dx=dA/dy=0,并且假设相位损失函数φx,y是奇对称的,式(3)可以变为入射相位共轭光束的后向光束表达式:
Erx,y={expi(-φx,y+ωt-kz)+c.c.}。
(4)
当后向光束再次经过畸变介质,
(5)
可以消除由失真介质引起的增量相位。
由于实际制作的MCCRAs在加工过程中存在着面形误差和二面角误差[ 17],导致入射进CCR晶胞的光束会被角锥棱镜部分反射。一部分光束仅仅经过1次或2次反射,在进行第3次反射时已经被反射出角锥棱镜,这部分光并不会成为反射回收发机端的光束,所以存在一定的能量损耗。在下面的仿真与实验过程中,采用由三角形的CCR晶胞构成的MCCRAs,经电子显微镜观察,如图3所示,在MCCRAs中,每个三角形晶胞的间距为100 μm。
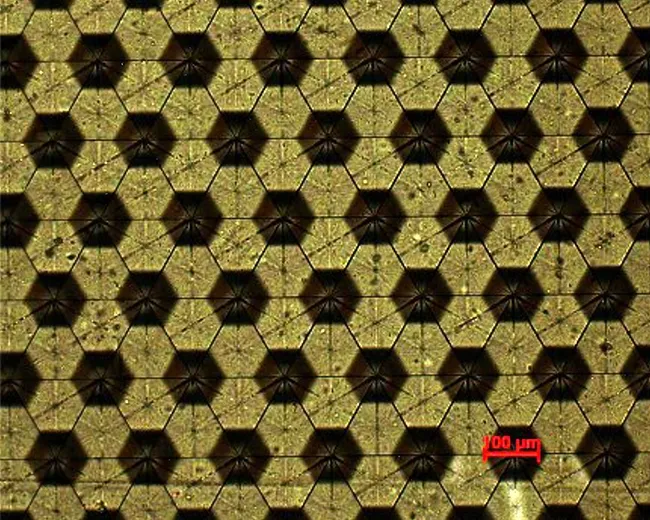
图3 三角形的CCR晶胞构成的MCCRAs
2 湍流模型与实验环境
2. 1 湍流模型
光波在大气湍流中传输时,受大气随机浮动影响导致折射率的随机变化,实验中的大气湍流的强度由折射率结构参数来衡量,该参数可以使用温度结构参数和大气压P来描述[18]:
(6)
式中,P为标准大气压强;T为开尔文温度。温度结构参数与温度的变化程度相关,
(7)

(8)
2. 2 实验环境
图4(a)显示了实验FSO链路示意图,整个光路过程为FPGA产生一组信息码元,将信息加载在635 nm的激光器发送出去,经湍流信道模拟箱,由反射器反射回湍流信道模拟箱,而后分光棱镜反射至光探测器,最后光探测器将光信号转化为电信号经FPGA处理,计算误码率等相关参数。其中,湍流信号模拟箱长7 m,宽度和高度均为50 cm,在箱体两端分别放置一个暖风机,每隔固定距离设置通风口,构建湍流环境。湍流模拟箱的实物图如图4(b)所示。其他一些关键器件的参数如表1所示。
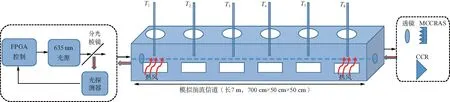
(a) 大气湍流模拟箱系统结构

(b) 实际实验环境图4 FSO实验环境

表1 实验器件的关键性参数
由于实验室内实验环境的限制,实验采集了3组不同湍流强度下的温度数值,如表2所示,根据式(6)、式(7)和式(8),分别计算出相应的湍流强度。
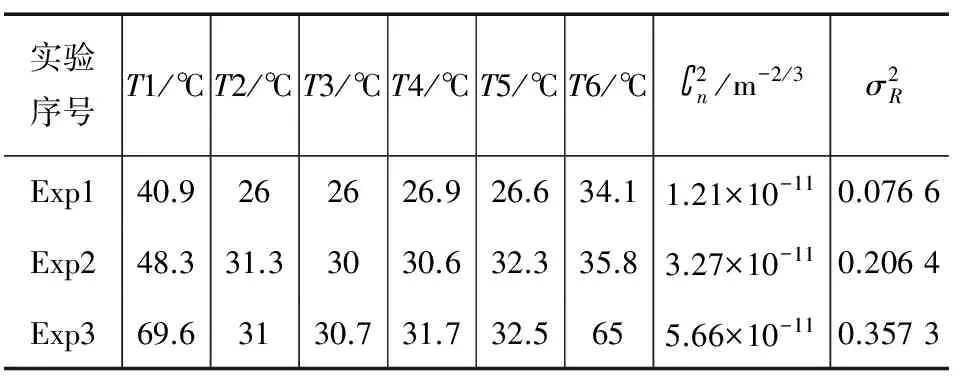
表2 湍流信道模拟箱温度测量
3 实验结果分析
首先,在不加载调制信号的情况下,观测经由CCR和MCCRAs反射回收发机端的光斑变化。如图5所示,在没有湍流的情况下,可以看到经CCR和MCCRAs反射回的光斑几乎没有差别,经MCCRAs返回的光斑,由于激光入射至晶胞之间的空缝产生的衍射现象和MCCRAs本身存在的一些加工误差导致反射回的能量有一定的损耗,中心圆光斑周围会产生一圈较为模糊的光斑存在。当在湍流环境下观测经2种反射器件发射回的光斑时,可以看到2个光斑有了较为明显的光斑。经由CCR返回的光斑呈不规则形状,而且有随机抖动的特点;但由MCCRAs返回的光斑其中心部分稳定并保持圆形,而且光斑固定,不存在大幅度抖动的情况。通过有无湍流环境下光斑的变化,可以得出MCCRAs有较为明显的光波补偿性能,经由MCCRAs反射回的光斑可以保持一个稳定的状态。
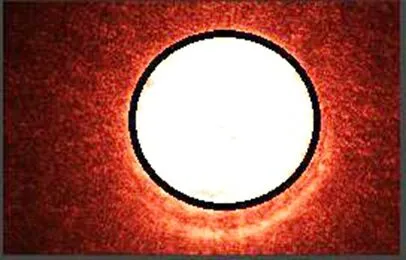
(a)经CCR反射,无湍流情况下
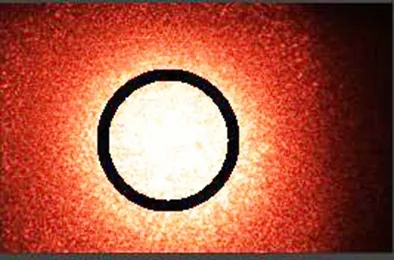
(b) 经MCCRAs反射,无湍流情况下

(c) 经CCR反射,有湍流情况下
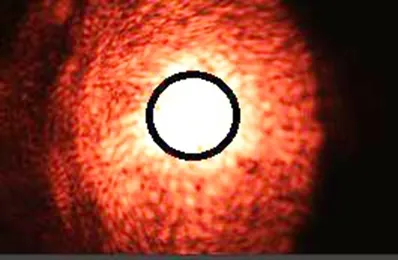
(d) 经MCCRAs反射,有湍流情况下
然后,在发射光束上加载了20 kHz的信号,并引入不同程度的噪声,其不同湍流强度的下BER曲线如图6所示,横坐标为信噪比SNR。从图中可以看到,在SNR超过20时,使用CCR做反射器件的MRR FSO系统的误码率出现剧烈变化,误码率有逐渐增大的趋势。而使用MCCRAs作为反射器件的MRR FSO系统的性能较为稳定,BER曲线保持一致,从通信性能参数方面验证了MCCRAs相对于CCR的抵抗大气湍流效应的能力。
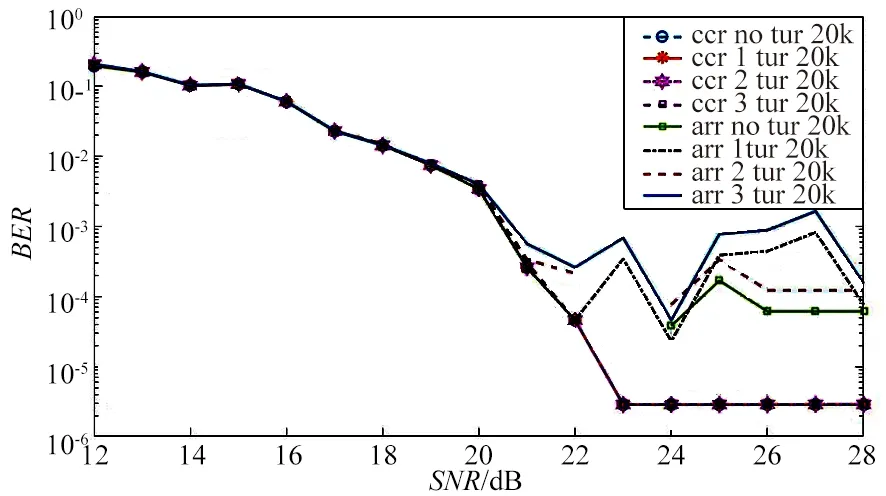
图6 不同湍流环境下2种反射器件的BER曲线
4 结束语
首先在理论上介绍了微角锥棱镜阵列MCCRAs的基本构造,通过以往成果中的公式推导指出了MCCRAs的波前相位补偿原理,然后在室内搭建了模拟大气湍流环境的实验箱,建立了一套相对完整的MRR FSO系统来验证MCCRAs在实际应用中的补偿性能。在室内模拟的弱湍流环境下,观察经过模拟大气湍流环境下的光斑抖动程度和强度变化,从现象上验证了MCCRAs的伪相位共轭特性;在传输信号上加载SNR噪声,比较不同程度SNR噪声下误码率数值的变化,证明了将MCCRAs作为MRR FSO系统反射器件在抵抗大气湍流效应、增强链路稳定性上的作用,验证了其应用在未来长距离星地激光通信的可行性。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
法律方法(2022年2期)2022-10-20
中学生数理化(高中版.高考理化)(2019年11期)2019-11-30
中学生数理化(高中版.高考理化)(2019年11期)2019-11-27
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
中学生数理化(高中版.高考理化)(2019年10期)2019-11-08
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
中学化学(2019年1期)2019-06-29
