老人跌倒姿态实时识别系统硬件设计
2019-03-26 03:00色海锋卢少微王晓强马克明
沈阳航空航天大学学报 2019年1期
徐 涛,孙 威,色海锋,卢少微,王晓强,马克明
(沈阳航空航天大学 a 自动化学院;b 材料科学与工程学院 c 航空宇航学院,沈阳110136)
人口老龄化程度不断加深使老人的日常健康监护逐渐引起了人们的重视。伴随着老人年龄的增长,其生理功能退化严重,而跌倒是影响老人正常生活和健康的重要因素之一[1]。发生意外跌倒时,如果没有及时的救治,很可能会导致比较严重的后果[2],且不同的跌倒姿态引发的伤害程度不同。故而研发一套老人跌倒姿态实时识别系统,准确监测老人跌倒的状态和姿态,及时通知医生和家人进行救助,最大限度地减少跌倒造成的伤害,以期实时监护老人的日常生活[3]。
目前检测人体跌倒的主要方式有图像视频分析法、环境变量分析法与可穿戴式分析法。图像视频分析法通常在老人的活动范围安装多个视频摄像头,通过特定的图像处理方法判断老人是否跌倒[4-9]。但该系统存在一些问题比如视频摄像头只能监测一定的范围,同时视频摄像头存在一定的死角而且视频监控也会暴露老人的隐私。环境变量式分析法是在有限的空间内安装一个或多个传感器以监测环境的变化,并据此分析人体的躯体和姿态信息,常用的传感器包括麦克风、红外传感器、振动、声频等[10-12]。也可以利用多种环境传感器相互结合对数据进行采集,作为跌倒判定的依据[13]。环境变量式分析法的特点是将传感器固定在室内进行跌倒检测,其优点是无需穿戴,对老人的日常活动影响较小,而且采用的并非图像数据,不暴露老人的隐私。缺点是系统的成本较高,其监测区域有局限性,易受环境的影响因而误报率较高。可穿戴式分析法一般将微型传感器嵌入到可穿戴式设备中,在人体佩戴可穿戴式设备时采集数据,通过特定的数据处理算法分析并判断人体是否跌倒,通常采用的传感器包括陀螺仪、压力传感器、加速度传感器等[14]。可穿戴式设备体积小易于携带,不影响人体的日常工作与生活,避免老人隐私的泄露,因此在跌倒检测方向国内外针对于可穿戴式分析法的研究比较多[15-16]。目前国内外众多研究人员致力于研究更好的老人跌倒监测装置,但现有的老人跌倒监测还存在许多问题,如由于采用单一传感器误报、漏报率较高;跌倒检测算法的复杂性;仅判断老人跌倒没有获得老人跌倒的姿态;不能及时地将老人的状态和位置信息通知家属等问题。
本文提出一套老人跌倒姿态实时识别硬件设计方案,采用可穿戴式分析法将MPU6050与石墨烯/橡胶传感器相结合,对跌倒信号进行综合判断。老人佩戴此可穿戴装置,在跌倒或意外情况发生时,该装置判断出老人跌倒姿态,触发报警同时将老人的跌倒姿态和位置信息发送给用户家人,使老人得到及时的救治。
1 总体设计
本文的跌倒姿态识别系统主要包含实时监测身体姿态、报警、位置定位与信息传送这四大功能。老人跌倒姿态实时识别硬件系统由石墨烯/橡胶传感器模块、MPU6050模块、微处理器模块、蓝牙模块、报警模块、电源模块和手机端APP等多个部分组成。系统的总体设计框图如图1所示。

图1 系统总体框图
硬件系统的微处理器实时监测石墨烯/橡胶传感器和MPU6050的输出信号,石墨烯/橡胶传感器位于膝盖处,传感器的电阻会随着腿部运动而发生变化,从而实现对腿部运动状态监测;MPU6050安装在人体上身,用来监测人体正常状态和意外跌倒时加速度水平。当监测到跌倒信息时,系统的报警模块发出声音和光的报警信息,提醒发生意外情况,同时监护手机把跌倒姿态连同位置信息以短信的形式发送至预设手机上。
2 跌倒检测模块设计
2.1 石墨烯/橡胶传感器
石墨烯是由碳原子组成的一种性能优异的二维碳纳米材料,具备优异的光学、电学、力学特性,被认为是一种未来的革命性材料[17]。橡胶是一种在室温下具有可逆形变的高弹性聚合物材料,但普通橡胶各项性能较差[18],只有加入增强性填料等助剂加工后才拥有更多功能[19],石墨烯作为纳米填料加入橡胶后会获得较好性能。本文采用的石墨烯/橡胶传感器是将石墨烯与三元乙丙橡胶复合,该高性能橡胶结合了石墨烯和三元乙丙橡胶的优点,既有较好的力学、电学性能,又能在很小的外力作用下产生较大形变,除去外力后能恢复原状。为测试其柔韧性,使用具有数据记录功能的FLUKE 2638A数字万用表记录传感器在0°~180°弯曲测试期间的电阻。将数据处理后得出石墨烯/橡胶传感器电阻变化率随弯曲程度的变化曲线。制备的石墨烯/橡胶传感器及其对应的弯曲电阻变化率曲线如图2所示。

图2 石墨烯/橡胶传感器及其力学性能图
由图2可以看出,石墨烯/橡胶传感器对弯曲程度具有近似线性的响应,其电阻率随着弯曲程度的增加而增加,随着弯曲程度的降低而减小。石墨烯/橡胶传感器的线性电阻响应与柔韧性为跌倒姿态识别提供了新的思路。因此,将其放在膝盖处实现对腿部运动状态的监测。根据膝盖的状态,可以更准确地识别跌倒姿态。
2.2 MPU6050传感器
MPU6050集成了三轴陀螺仪与三轴加速度计,可以实现对人体跌倒数据的采集与处理,它还包括了数字运动处理器DMP和模数转换模块,通过I2C接口,它可以连接第三方数字传感器(通常连接三轴磁力计),MPU6050将采集的数据信号通过ADC模块转化为数字信号并通过主I2C端口发送给外部设备。MPU6050安装在人体的腰部,石墨烯/橡胶传感器模块在膝盖处,建立与传感器采集方向一致的人体三维姿态坐标系如图3所示。
2.3 跌倒检测算法设计
跌倒是人体的一种瞬间动作,具有突发性、剧烈性和短暂性。通常人体跌倒的姿态主要有:向前倒下、向前跪下、向后倒下、向后坐下、向左倒下和向右倒下等形式。人体的日常行为有很多种,我们主要考虑以下几种容易与跌倒行为相互混淆的情况:站立、步行、俯身、上下楼梯和慢跑。本算法主要研究如何有效地将人体跌倒与日常行为区分开来,并识别出跌倒后的姿态。在跌倒发生的过程中,人体加速度的大小和方向会发生变化,同时身体也随之倾斜并引起倾斜角度的变化。故而角度和加速度的突然变化可作为跌倒监测的重要定量化指标。合加速度幅值SVM如式(1)。
(1)
其中,ax为X轴上的加速度,ay为Y轴上的加速度,az为Z轴上的加速度。

图3 人体三维姿态坐标系
SVM是区分人体运动状态的重要参数:SVM越大人体运动越激;SVM越小人体运动越平缓[20]。人体在进行日常行为和跌倒时,人体的身体加速度和身体倾角会有峰值,因此可以用阈值法来判断跌倒的发生。通过实验预先设定合适的合加速度阈值(本文设为2.65 g),当判断到合加速度值超过阈值时,即可判定是否发生跌倒。人体体位的另一个重要特征就是身体的倾角,人体处于直立状态时,躯干与重心方向的倾角小于60°;而人体处于水平状态时,倾角接近90°。人体在跌倒时,躯干从直立状态变为接近水平的状态。为提高检测精度、降低误判率,引入陀螺仪的角度作为二次判断标准,即人体倾角值大于60°作为辅助判断。通过对加速度和角度的双重判定,可以判断出人体跌倒。判断出人体跌倒的姿态需要将石墨烯/橡胶传感器考虑在内,将膝盖弯曲程度作为后续判断人体跌倒姿态的重要标准。跌倒算法的流程图如图4所示。

图4 跌倒算法流程图
3 系统硬件设计
3.1 恒流源模块
石墨烯/橡胶传感器本身有电阻,为了采集其电阻变化本文设计了恒流源电路,将石墨烯/橡胶传感器接入恒流源电路中。在恒流源电路中,恒定的电流为0.1 mA。当传感器发生形变而产生电阻变化时,石墨烯/橡胶传感器经过该电路完成电阻-电压的转化。电路设计如图5所示。

图5 恒流源电路设计
3.2 主控中心电路
本系统选用TI公司研发的MSP430F149芯片作为采集终端主控中心的核心处理单元,它具备的独特之处是:功耗超低;处理能力强大,而且它本身有硬件乘法器;片上集成了很多的外围模块,且功能强大、精度较高;稳定性高。根据微处理器的最小系统功能要求,为了保证微处理器MSP430F149芯片能够正常工作,需要针对不同的环境设计微处理器最小系统,微处理器最小系统包含晶振电路和JTAG调试接口电路。微处理器最小系统如图6所示。
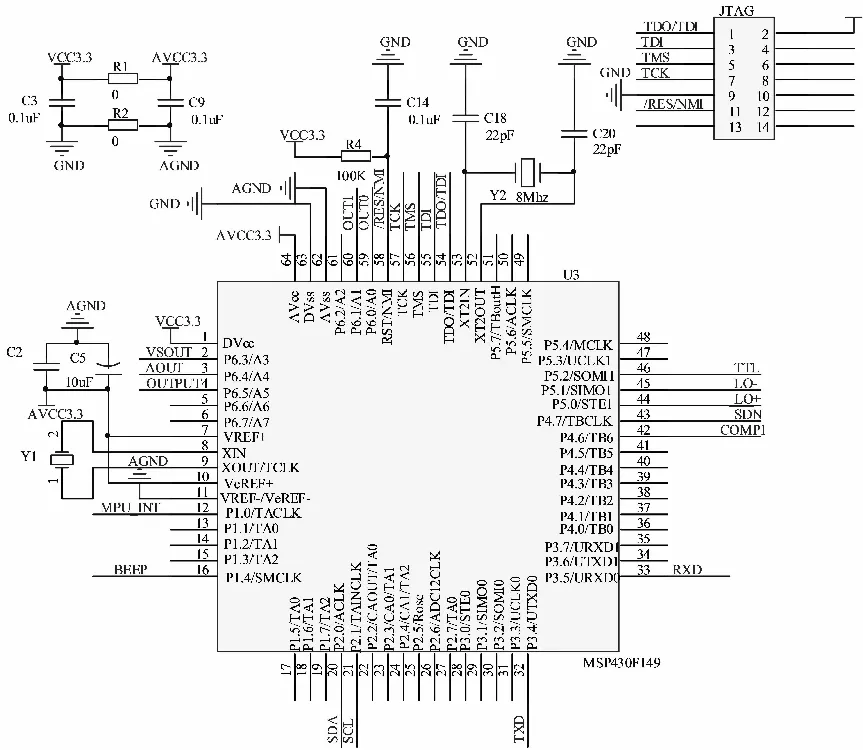
图6 单片机最小系统
外部晶振电路,主要为微处理器提供系统时钟、外设时钟以及辅助时钟等,JTAG接口电路,主要用来程序代码下载以及在线仿真。BEEP连接报警模块,当老人发生跌倒时蜂鸣器报警。无线传感器系统不仅仅需要MSP430F149的低功耗模式,而且还使用该芯片的片内串口通信模块、模数转换(AD)模块、模拟SPI接口、模拟I2C接口等相关模块。
3.3 电源模块
电源电路用于向数据采集系统中元器件及分支电路提供能量源,保持系统持续稳定的工作。在采集系统中采用6V电压为恒流源电路以及滤波、放大等电路进行持续供电。由于MSP430F149单片机、LM358等芯片属于低功耗芯片,需要提供3.3V恒定电源。蓝牙模块可以通过6 V的电压工作,所以需要设计电源模块,其中6 V电压由4节5号电池提供,电压设计如图7所示。
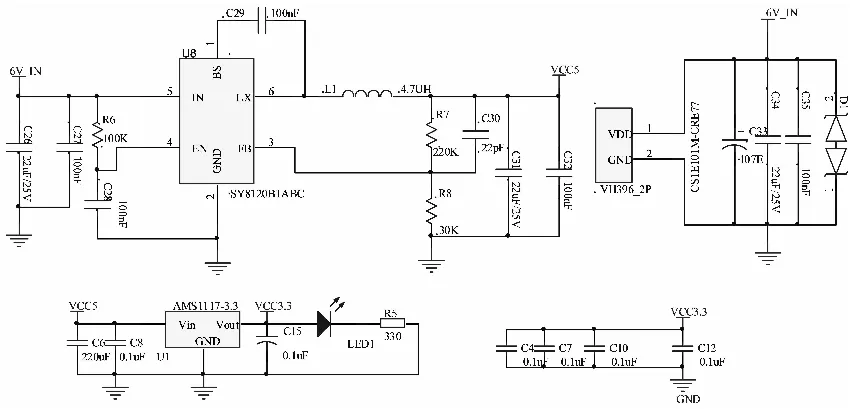
图7 电源电路设计
3.4 MPU6050模块
MPU6050是将陀螺仪和加速度计整合在一起的运动处理传感器,其高度集成化减少了大量的封装空间;与传统运动传感器相比,具有良好的抗干扰能力和更低的功耗,并且在设计上降低陀螺仪、加速度仪间的相互影响,提高了测量精度。利用MPU6050采集人体姿态数据,通过ADC模块将采集的数据信号转化为数字信号并通过主I2C端口发送给主控单元,然后单片机接收此数据并进行处理,转换为加速度幅值和角度。MPU6050电路如图8所示。

图8 MPU6050电路设计
3.5 报警模块
报警模块与MSP430F149的BEEP引脚相连,由蜂鸣器和LED组成。当检测到跌倒信息或者检测到报警信息时,系统通过报警模块发出声音和光的报警信息,提醒监测到发生危险。同时手机端将老人的位置信息连同跌倒姿态以短信的形式发送至监护手机上。报警电路如图9所示。

图9 报警电路设计
3.6 蓝牙模块
本文健康监护系统所采用的蓝牙模块是DX-BT05模块,该模块的电路原理图如图10所示。该蓝牙模块是一款高性能蓝牙模块,具有成本低、体积小、功耗低、收发灵敏性高等优点。实现了主从一体,内嵌了蓝牙协议栈,收发字节没有限制,拥有比传统蓝牙更远的距离通信。该模块主要用于短距离的数据无线传输领域,可以方便的和PC机的蓝牙设备相连,也可以两个模块之间的数据互通。
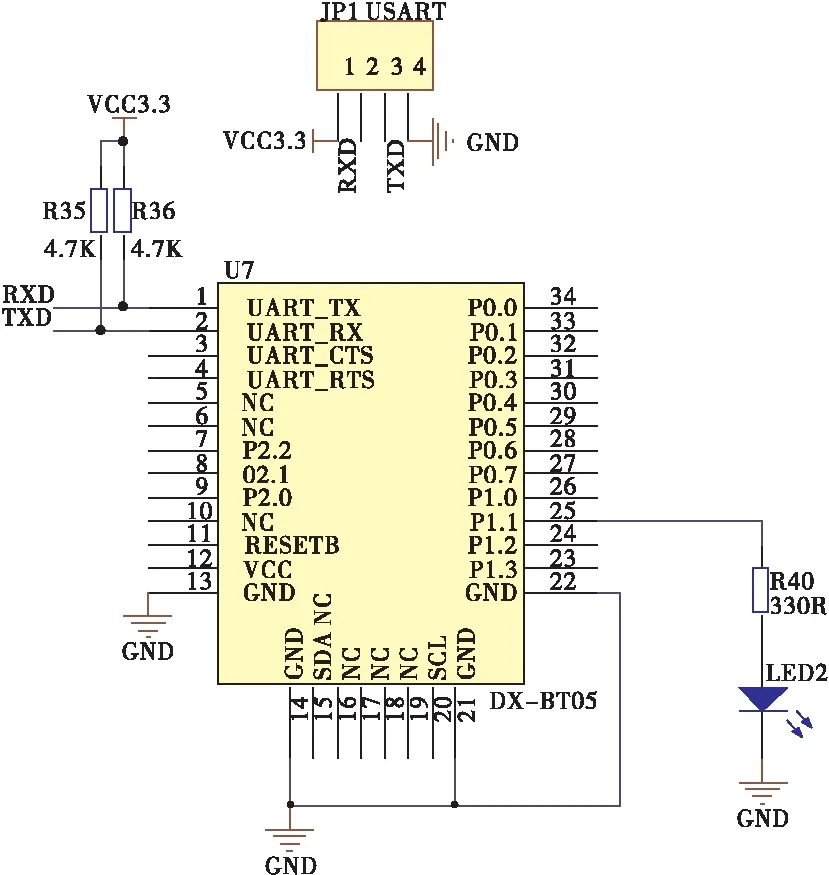
图10 蓝牙电路设计
DX-BT05蓝牙模块同时支持软/硬件设置主从模式,本系统使用手机端控制蓝牙的连接,通过AT命令进行设置。在P1.1引脚焊接一个小灯,目的是识别蓝牙模块所处的工作状态,在蓝牙模块连接后小灯就会闪烁。
4 实验结果与分析
为了验证跌倒姿态实时识别系统的有效性,特设计了如下的测试实验。选取10名测试者进行实验,测试者分别完成6种日常活动和6种跌倒姿态。每名测试者每种动作重复5次,即每种动作50次实验。并在实验开始之前,设置好用户信息和监护手机号码。安排一名人员跟踪记录每种动作的完成以及是否正常报警。实验完成之后,对实验的结果进行统计和分析,计算出每种姿态的正确率以及误报/漏报率,测试结果如表1所示。
从表1可看出,在跌倒姿态中向左倒下和向右倒下均能被非常准确地识别到,它们的准确率为100%,这意味着MPU6050能准确地区分向左倒下和向右倒下。向前趴下的准确率为88%,而12%被判定为向前跪下,向后躺下的准确率为86%,而14%被判定为向后坐下。同时,向前跪下的准确率为84%,而16%被判定为向前趴下,并且向后坐下的准确率为82%,而18%被判断为向后躺下。对于正常行动,识别站立和行走的准确率分别为100%和98%。识别俯身的准确率为92%,而8%被认为是跌倒姿势。识别上楼和楼下的准确率分别为92%和90%。识别慢跑的最低准确率为76%。这些数据表明系统可以区分日常行为和跌倒,判断姿态并能及时发出报警,基本达到预期效果。通过对实验数据进行有效性计算得出了系统监测跌倒状态的准确率达95.84%,跌倒姿态的准确率达90.84%。

表1 测试结果
5 结论
本文主要针对老年人跌倒姿态识别方向,开发设计了一套可穿戴跌倒姿态实时识别硬件系统。该系统以MSP430F149单片机为主控中心,接收来自MPU6050传感器的数据,并结合石墨烯/橡胶传感器的数据提出有效的跌倒姿态识别算法。集成了跌倒报警模块,当发生意外情况时,及时地通知医生和家人进行救助,以期最大程度地减少伤害。得出结论如下:
(1) 搭建了系统硬件监控平台。智能采集终端采集MPU6050和石墨烯/橡胶传感器的输出信号,主控单元芯片对采集到的数据进行处理分析,并通过蓝牙模块将数据传送至手机端,发生意外情况时可及时报警。该智能采集终端具有功耗低、体积小、方便携带、灵活性高的特点。
(2)提出了有效的跌倒姿态识别算法。该算法能够根据MPU6050的数据区分正常姿态与跌倒姿态,具备了跌倒状态监测的功能和识别功能,系统在保证实时性的条件下跌倒状态的准确率达95.84%,跌倒姿态的准确率达90.84%;
(3)实现了手机端APP的开发与设计。手机端能实时显示老人的姿态信息并在意外发生时及时报警,将用户的位置信息连同跌倒姿态以短信的形式通知相关监护人员,赢得宝贵的救护时间。
综上所述,本文搭建的老人跌倒姿态实时识别系统数据采集准确可靠,功能设计合理,运行稳定,能够满足老人跌倒姿态实时识别的需要。未来还可增加心率及体温等人体生理信息,以便更加完善老人的日常健康监测。
猜你喜欢
工业设计(2022年7期)2022-08-12
军事文摘(2021年18期)2021-12-02
小学科学(学生版)(2021年6期)2021-07-21
学生天地(2020年3期)2020-08-25
家庭影院技术(2018年10期)2018-11-02
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
小学科学(学生版)(2018年6期)2018-06-26
家庭影院技术(2018年3期)2018-05-09
科学大众(中学)(2017年6期)2017-09-04