SMCTM-Flex 软启动器在水泵上的应用
2019-03-25 07:29吴小根
有色冶金设计与研究 2019年6期
吴小根
(云锡文山锌铟冶炼有限公司,云南文山663703)
随着科学技术的发展,水泵的应用也在随之改变,在水处理工艺设计中,通常会对不同水量的设备选用对应的增压水泵。 为避免水泵启动时对电路及电器元件的冲击, 需要针对功率大小选择对应的启动方式: 当水泵电机功率<15 kW 时, 可以采用电磁控制(接触器等)直接启动;当水泵电机功率为15~30 kW时,可以采用星三角启动方式,也可以采用软启动或变频启动方式以保证启动稳定;当水泵电机功率>30 kW 时,则必须采用软启动或变频启动方式。
1 项目背景
云锡文山锌铟冶炼有限公司成立于2016 年,公司生产规模为年产100 kt 锌、60 t 铟。为避免水泵启动时对电路及电器元件的冲击, 公司部分水泵采用了美国罗克韦尔自动化公司生产的AB 软启动器。该设备为SMCTM-Flex 控制,可提供一系列的启动模式,如带可选突跳起动的软启动、限流启动、双斜坡启动、全压启动、软启动、软停车等。 该公司的AB 软启动控制,主要采用软启动和软停车启动模式,可以实现就地和远程(DP 通讯)控制。通过现场2 年的使用对比,AB 软启动器相对于其他产品,结构紧凑、体积小,调试便利,免维护,具有全数字功能,便于远程组网操控, 无需在线路上增加元件, 并能完成软泊车,具有较强的适应性。
2 就地控制
“就地控制”顾名思义就是指在设备现场设有1个就地控制箱,可以直接启停设备。就地控制可以很好地观察设备启动时的运行状态,根据启动状态的好坏,快速地判断是否需要停止设备,从而减少不必要的经济损失。 控制器接线端子上的定义,如图1 所示。

图1 控制器接线端子
图1 中端子号分别为:11 号控制电源输入,12号控制电源公共端,13 号控制器是能输入,14 号控制器模块接地,15 号可选输入端#2,16 号可选输入端##1,17 号起动输入,18 号停车输入,19 号、20 号辅助触点#1,21 号、22 号未用,23 号、24 号PTC 输入,25 号、26 号测速计输入,27 号、28 号接地故障,29 号、30 号辅助触点#2,31 号、32 号辅助触点#3,33 号、34 号辅助触点#4。
用户可以根据自己的控制需求设计控制原理图。 该公司水泵要求实现就地控制加DP 通讯,远程由DCS 系统控制,在设计上需考虑远程/就地切换的转换开关,其控制原理见图2。
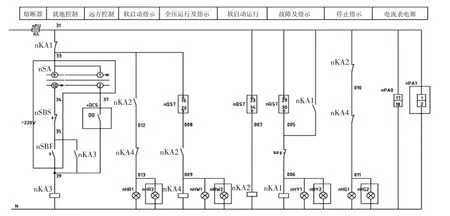
图2 控制原理
从图2 中可以看到:1)nKA3 为就地启停的中间继电器,控制器16、17 号端子导通软启动器启动。2)nSA 为就地/远程转换开关, 控制器15 号端子得电,软启动器远程状态。3)nKA1 为故障中间继电器,控制器辅助端子#2。 4)nKA2 为软启动运行指示灯中间继电器,控制器辅助端子#3。5)nKA4 为全压运行指示灯中间继电器,控制器辅助端子#1。 6)AB 接DP 通信线。
软启动的设置:进入软启动设置菜单,把可选输入“1”设置为“启停(就地控制)”;把可选输入“2”设置为“网络证口(远程通信信号监控)”;根据电机铭牌,设置电机参数;再根据电机参数,设置启动模式为软启动、停止模式为软停止。 根据调试实际情况,特别是突跳等级,设置保护参数;设置通讯掩码为44,供DP 通讯使用;设置数据连接中的数据输出,根据控制器参数线性列表选择参数序号,以便把软启动的监测参数通过DP 通信传到DCS 系统。
根据设计原理图用导线连接各电气元件,T1、T2、T3 接电机主回路电源线,接线完成后,就可以通电就地试车了。
3 远程控制
“远程控制”是指将水泵的状态及控制信号以DP通讯的方式接入远端DCS 控制系统,通过在DCS 上编制逻辑控制程序,使用上位机编程软件编制画面,使操作工能在上位机上直接对设备进行操作。 该公司采用艾默生的DeltaV 系统,通过系统机柜中的DP通讯模块连接至软启动器的DP(Profibus)通信模块(20-COMM-P)上,采集设备的状态并进行远程控制。 在控制系统上,通过进行相应地联锁和顺控等,来实现设备的联锁保护和自动启停。 为了实现DP通信首先要有软启动的通信点表,包含逻辑状态字以及逻辑命令字。 使用逻辑状态字和逻辑命令字就可以在DeltaV 系统上进行组态。 G、H 逻辑状态字表,见表1 所示。
3.1 控制逻辑组态
1)建立通信点。根据软启动器上所设置的DP 地址,查找到该设备,再依据GSD 文件将设备的输入输出信号映射到对应DP 模块上, 在DeltaV 系统上I/O 建立通信点位。
2)建立1 个功能块(Control studio)。 根据工艺对设备的工作需求, 在Control studio 中选用相应的功能块:
(1)数据传输要选用输出(入)功能块,参数在此功能块或模块外部自动显示为输出(入)连接器。 如果使用此模块或当前在另一个模块中创建的复合模块,则输出(入)参数以连接器的形式显示,并且用户能够向此输出(入)联系。
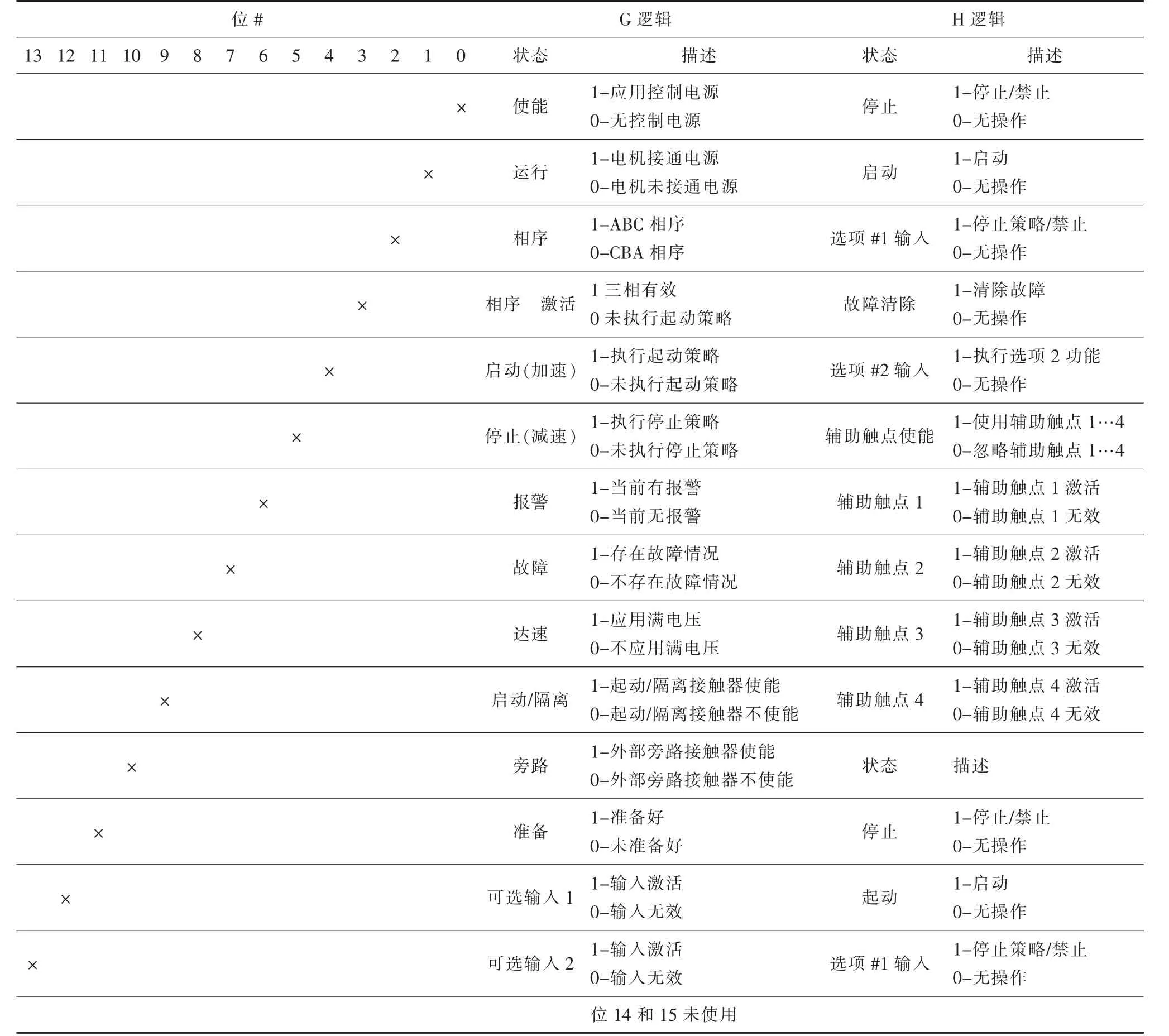
表1 G、H 逻辑状态字
(2)状态字就要选用BFO(布尔泛输出功能块)功能块。该功能块以二进制加权输入解码为单位,并为每个位产生一个离散输出。 此功能块支持信号状态传播,如图3 所示。
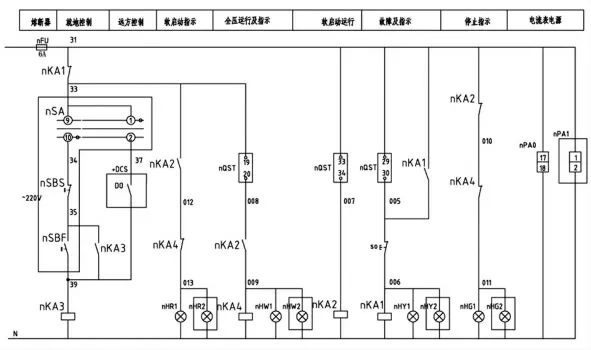
图3 BFO(布尔泛输出功能块)功能块
PARAM1 就是输入模块,DP 卡件上的数据传输到PARAM1, PARAM1 把读取的信号传到BFO1 模块上,经过BFO1 模块把软启动的状态全部解码。 根据软启动状态字点表就可以知道软启动的状态,如OUT_01 就是使能(准备好)信号。
(3)完成读取状态的信号后,下一步就是编辑控制信号,即控制启停设备。选发出指令模块如图4 中的STOP(START),就是输入模块发出指令0 或1 的信号,判断该设备是否处于不正常的状态,如需报警则要用到开延迟计时器功能块(OND)和动作功能块(ACT)。 开延迟计时器功能块(OND)收到状态信号后,下一步就是要控制设备的启停,向设备输出传递真(1)离散输入值的时间延迟指定的时间周期。此功能模块支持信号状态传播。 在开延迟计时器功能中没有模式或标准的报警检测。动作功能块(ACT)根据输入值评估单行表达式,在表达式中可使用数字函数、逻辑运算符和常数。 表达式必须导入赋值,因此必须使用赋值操作符‘=’。 在动作功能块中没有模式、标准报警检测或状态处理,当置位输入(IN_D)时,动作功能块评估单个表达式,结果发送给外部引用参数。此功能块没有输出。启停设备指令根据设备就地信号和远程信号选择,只有在远程信号情况下才可以启动设备,故需要与功能块(AND)。与功能块根据2 个到16 个离散输入的逻辑与结果产生离散输出值。此功能支持信号状态传播。在与功能块中没有模式或标准报警检测。 与功能块检查用户定义的输入,并对输入应用逻辑与功能。 当全部输入为真(1)时,输出为真(True);当一个或多个输入为假(0)时,输出为假(False)。 同时选择一个输出模块,将指令输送到软启动器,这样就实现了远程启停。按照上述步骤,程序编译工作就完成了。
3.2 操作画面组态
在完成程序编译后,还需设计1 个人机操作界面。快速导入编辑状态,来设计人机操作界面,可将泵的模型图直接连接在相应的工艺流程中,见图4,并连接上泵的相关信号(包括运行状态、远程信号等)。界面编辑完成后,可切换到运行界面,见图5。
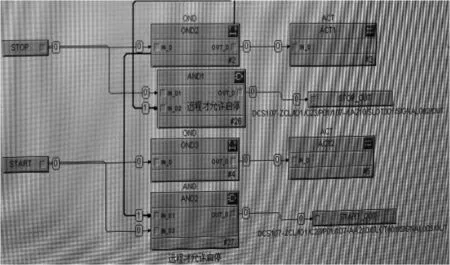
图4 指令模块
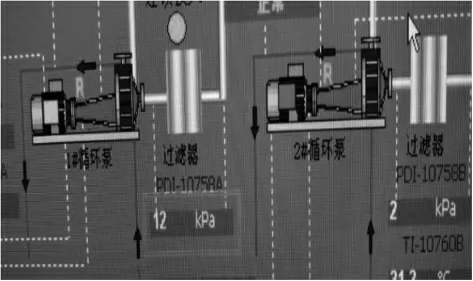
图5 人机操作编辑界面
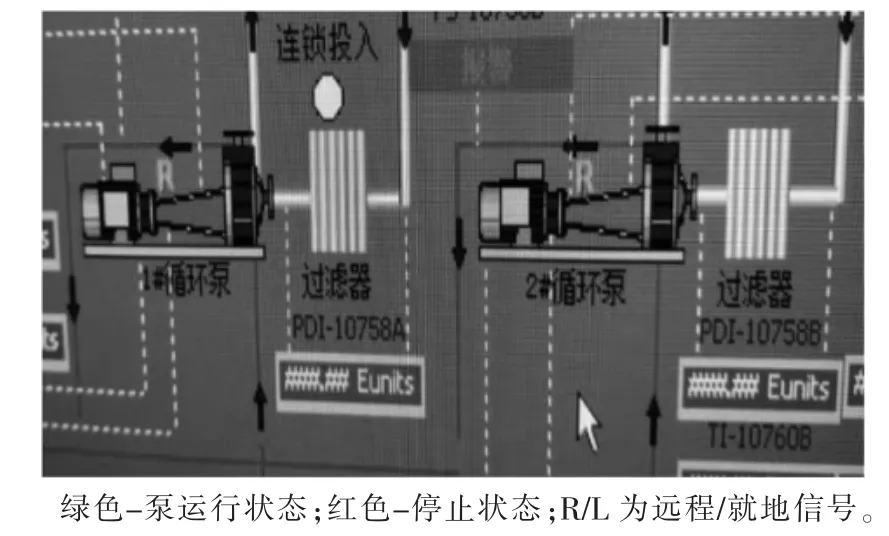
图6 人机操作运行界面
4 总结
该系统投入使用2 年多以来,AB 软启动, 性能稳定、结构紧凑、体积小的特点得到充分显现,该系统可通过通信等方式控制,较大程度上节约了成本,减少资源的浪费。
猜你喜欢
防爆电机(2022年4期)2022-08-17
建筑与预算(2022年2期)2022-03-08
水泵技术(2021年5期)2021-12-31
昆钢科技(2021年1期)2021-04-13
仪器仪表用户(2020年8期)2020-08-05
汽车维护与修理(2020年15期)2020-02-04
汽车电器(2018年1期)2018-06-05
科技与创新(2017年14期)2017-08-09
中国氯碱(2015年9期)2015-11-02
组合机床与自动化加工技术(2014年9期)2014-03-01