电子密度模体插件自动定位方法
2019-03-25 03:46,
中国医学影像技术 2019年3期
,
(江西理工大学信息工程学院,江西 赣州 341000)
锥形束CT(cone-beam CT, CBCT)在三维适形放射治疗(three-dimensional conformal radiotherapy,3D-CRT)、强调放射治疗(intensity-modulated radiotherapy, IMRT)和影像学引导放射治疗(image-guided radiotherapy, IGRT)等精确放射治疗技术[1]中均发挥着重要作用,已广泛用于临床放射治疗前摆位误差纠正。CT值的精度直接影响自适应放射治疗剂量的准确性[2],故计算CBCT放射治疗剂量[3]前应先校正CT值,即建立标称CT值和衰减系数之间的转换关系[4],标称CT值和衰减系数均由手动选取重建后三维数据的ROI求平均值所得,而手动选取ROI增加了校正过程的复杂性。有研究[5]采用电子密度模体(electron density phantom;型号 CIRS062)校正CBCT的CT值。CIRS062内部为头部模体,直径180mm,厚50mm,共8种组织等效插件,插件直径30mm、厚50mm,分别为呼气态肺、吸气态肺、脂肪、乳腺、水、肌肉、肝、松质骨和密质骨。
自动选取ROI的前提是分割图像中的目标区域。传统图像分割方法包括基于阈值的分割、基于区域提取的分割、基于边缘检测的分割和结合特定理论工具的分割等。随着技术的发展,卷积神经网络已广泛用于检测、分割和物体识别等计算机视觉的各个领域,特别是深度卷积神经网络[6](deep convolution neural network, DCNN)推动了图像语义分割的发展[7]。语义分割是指将图像中相同对象的像素分成同一类,并将不同对象分割出来。本研究采用CIRS062校正CBCT的CT值,以基于DCNN[8]的方法对CIRS062进行分割,先分割出呼气态肺、吸气态肺、松质骨和密质骨4个插件,再采用摩尔邻域追踪算法[9]处理分割目标的边缘获得精确的分割结果,最后根据几何特征定位每个插件的位置而获得每个插件的ROI,并与参考区域进行比较,以判断定位区域是否在插件上。
1 设计与方法
1.1 实验数据
1.1.1 图像数据 采用中国科学院深圳先进技术研究院自行搭建CBCT系统(由Toshiba E7242X X线球管、Varian PaxScan 4343CB平板探测器与Indico IQ 50KW高压发生器等设备搭建),管电流0.6 mA,重建矩阵512×512×512,不同管电压(80、100、125 kV)条件下扫描CIRS 062,实物图见图1A,训练图像见图1B~1D。数据样本过少可导致网络模型泛化能力不足,易陷入过拟合等[10]问题;而数据间的线性关系过多易造成模型在局部最优值上收敛。为增加数据样本,从三维图像中选择10张中间插件(水)不同形态的切片图像,经Average、Disk、Gaussian、Motion滤波器[11]处理获得160张滤波图像,故数据集是三维图像中10张切片图像和160张滤波图像,随机选取20张作测试集,剩余150张再进行数据增强处理,最终产生训练集。
1.1.2 标签数据 标签勾画工具采用ITK-SNAP软件。ITK-SNAP可用于分割三维医学图像的结构,并将外部或不相关的特征保持在最低限度。标注对象为呼气态肺、吸气态肺、松质骨和密质骨,其他插件和圆盘均视为背景。实验数据运行软件采用Matlab R2018a,硬件配置采用Win 7系统,8核Intel(R)Core(TM)i7-6700 CPU@3.40 GHz的处理器,NVIDIA GeForce GTX 1080的显示适配器。
1.2 网络架构 DCNN架构由编码层和其相对的解码层及分类层组成,核心是编码层和其相对的解码层。网络架构图见图2,不同颜色表示操作不同,相同颜色块的个数表示操作次数相同。将大小为512×512的图像数据和标签数据均处理为大小256×256的图像输入网络,网络编码层遵循典型的卷积网络体系结构,由2个3×3卷积滤波重复应用组成,批量归一化(batch normalized, BN)[12]后传至非线性激活函数(rectified-linear non-linearity, ReLU)[13],再行大小为2×2步长为2的最大池化(max-pooling)[14]完成下采样,其中池化层能记录其在原图中的空间位置,使在解码层中进行上采样操作时能将相应的值映射到对应位置。每个编码层有相对应的解码层,对解码层进行大小为2×2的反卷积操作,利用编码层记录的空间位置填充相应位置的值进行图像恢复。将最后1个解码层输出的值传至Softmax分类器,获得每个像素的类别完成像素级分类和语义分割,其中加入BN层可提高网络泛化能力和模型精度、加快收敛速度及降低网络初始化的敏感度。
1.3 摩尔邻域追踪算法 由于DCNN分割结果边缘不够精确,选用摩尔邻域追踪算法处理边缘。摩尔邻域是指像素共享顶点或边缘8个像素的集合,即八连通区域的像素;基本思想是:当前像素P为白色,并规定为“起始”像素,一般P沿顺时针方向逐像素访问摩尔邻域的每个像素,遇到下一个白色时同样访问摩尔邻域每一个像素,直至遇到“起始”像素停止访问;停止标准为Jacob's停止标准(Jacob's stopping criterion, Gonzalez, R. C., 2010)[11]。
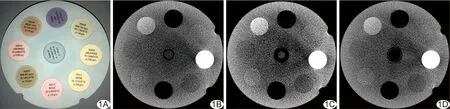
图1 CIRS 062实物图与三维图像切片图 A.实物图; B~D.第200层切片(B)、第222层切片(C)、第270层切片(D)三维图像切片图
1.4 数据训练 数据训练过程中对目标损失函数求得最小值,采用自适应矩估计(adaptive moment estimation, Adam)优化算法[15]对其进行迭代收敛。Adam是通过计算梯度的一阶矩估计和二阶矩估计的变化而改变学习率的方法,一阶矩估计是梯度的带权平均,计算公式为:ml=β1ml-1+(1-β1)E(θl);二阶矩估计是梯度的带权有偏方差,计算公式为:vl=β2vl-1+(1-β2)[E(θl)]2;二者初始均为0向量,但当衰减因子β1、β2接近于1时,ml与vl均倾向于0向量(接近于0向量),则对ml与vl进行偏差修正,其公式分别为:/、/,故Adam的公式为/ε)。
分割结果有多类,故采用Softmax分类器预测每个类所属类别的概率,其公式为:

(1)

1.5 评估方法
1.5.1 戴斯相似性系数(Dice similarity coefficient, DSC) 采用DSC[17]量化分析分割结果。DSC的计算公式为:DSC(A,B)=(2|A∩B|)/(|A|+|B|),其中A代表参考分割区域,B代表结果分割区域,|A∩B|代表A和B的交集。DSC的数值范围是[0,1],数值越高分割效果越好,0代表两者无交集,1代表两者完全重合。根据文献[17]的方法,DSC>0.7表示参考分割区域和实际分割区域重复度高,分割结果好。
1.5.2 精确度、召回率和综合评价指标(F1-measure) 计算语义分割边缘匹配度的关键思想是F1-measure[18],指在给定像素容忍距离情况下预测图像与真实图像之间的精确度与召回率。精确度反映被分类器判定的正例中真正的正例样本比重,计算公式为:P=TP/(TP+FP),其中TP为阳性,预测为阳性;FP为阴性,预测为阳性,P值范围为[0,1],P值越接近于1精确度越高。召回率反映被正确判定的正例占总正例的比重,计算公式为R=TP/(TP+FN),其中FN为阳性,预测为阴性,R值范围为[0,1],R值越接近于1召回率越高。
某些情况下精确度与召回率相互矛盾,如极端情况下预测结果只有1个且准确,则精确度为1,而召回率较低;反之,若所有结果都返回,则召回率是1,但是精确度又较低。评价时应综合考虑精确度和召回率2种评价指标。F-measure是综合精确度和召回率的整体领域指标,表示预测图像与参考图像的边缘匹配度,计算公式为:F=(a2+1)PR/a2(P+R),当a=1时,即为F1-measure,计算公式为:F1=2PR/(P+R),当较高时,则说明分割结果较好;本研究中采用图像对角线0.75%的值作为容忍距离。
2 结果
基于DCNN分割结果见图3A,由于网络中解码层上采样后与编码层融合时出现误差,分割的插件边缘含有不属于此插件类的信息,图3中绿色框内放大的密质骨边缘有其他插件类的信息;同样,图像中四角和中心区域均有此种情况(箭示区域)。为获得更精确的分割结果,先将四角和中心区域的其他类设置为背景类,再采用摩尔邻域追踪算法处理插件边缘,获得结果见图3B。与图3A相比,图3B中绿色框放大的密质骨边缘消除了其他插件类的信息。图3C为参考图像。测试集图像分割结果与参考图像所求的DSC、精确度、召回率及F1-measure见表1。定位CIRS 062插件ROI的结果见图4,红色圈为本方法定位的区域,绿点圈为参考区域。多阈值分割结果见图5。

表1 测试集图像分割结果量化分析
3 讨论
CIRS 062插件定位是CBCT系统中校正CT值的关键步骤。插件定位的准确性决定是否能合理选取插件ROI,为校正CBCT系统的CT值奠定基础。本研究提出基于DCNN模型的定位,分割结果中,不同标注对象的DSC均>0.85,精确度均>0.81,F1-measure均>0.61,表明分割结果较好,可实现自动定位CIRS 062插件ROI,相比于人工手动选取ROI更人性化。CIRS 062插件由不同密度的物质材料组成,多阈值分割一次只能分割2个固定插件(吸气态肺和密质骨);利用分割的2个插件,再根据几何特征定位其他6个插件。受CBCT散射伪影[19]的影响,部分层插件吸气态肺分割结果不完整,故无法定位。
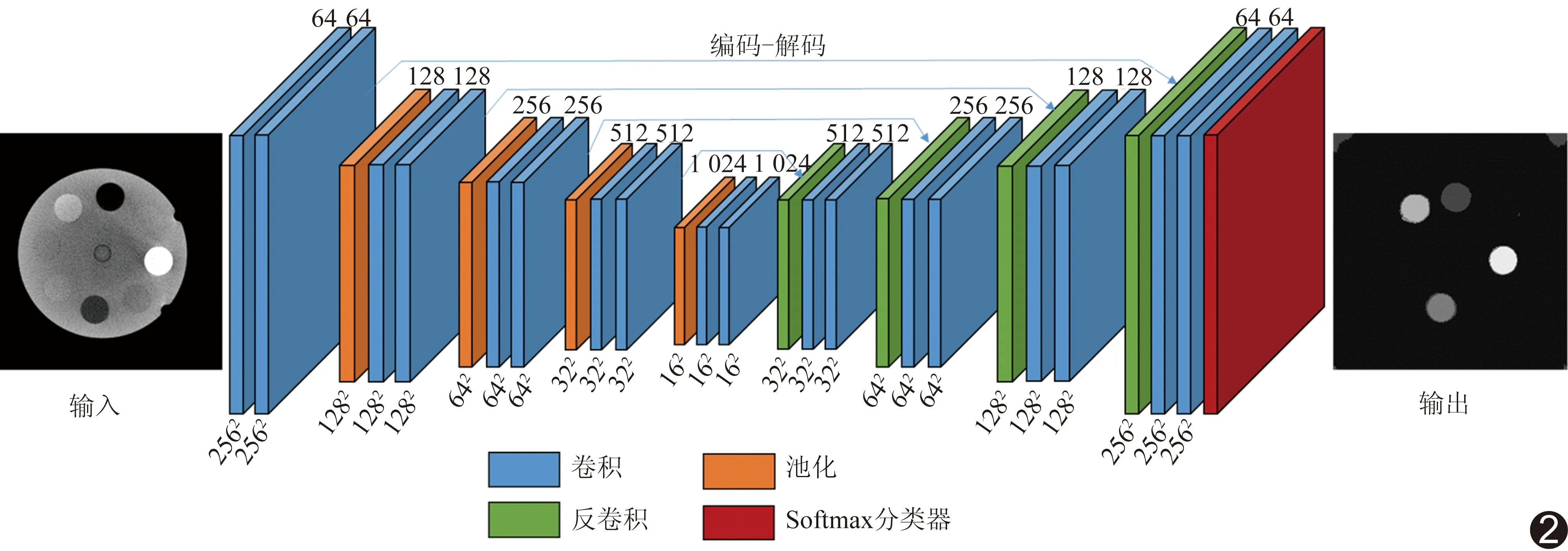
图2 CIRS 062插件定位的网络架构图
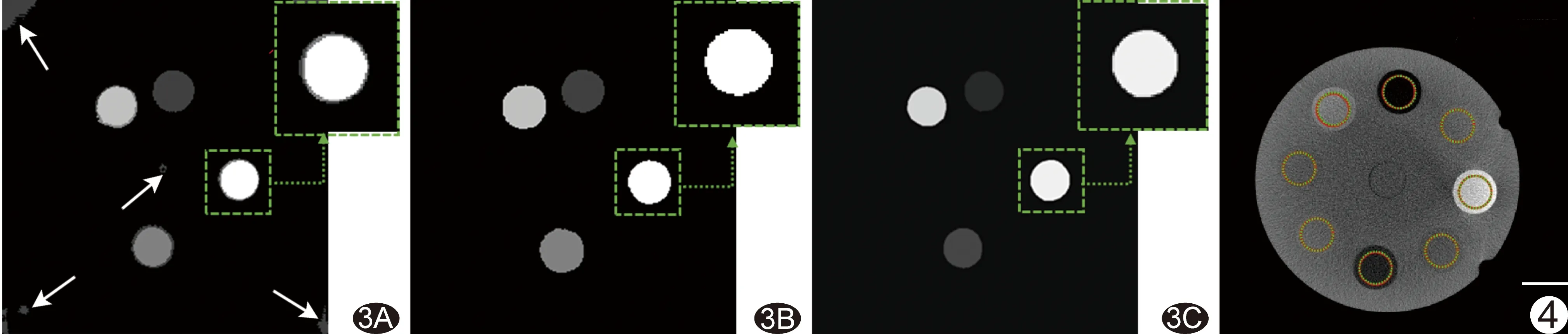
图3 分割结果图与参考图像 A.DCNN分割图,箭示分割结果中不属于此标签类的信息; B.本研究算法分割图; C.参考图像 (绿色框内为密质骨放大图) 图4 定位结果图 红色圈为本文方法定位区域,绿点圈为参考区域
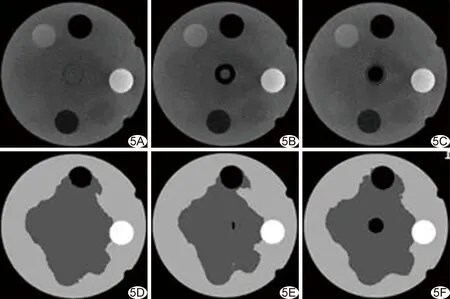
图5 阈值分割结果 A~C.分别为第200(A)、222(B)、270(C)层切片原始图像; D~F.分别为第200(D)、222(E)、270(F)层阈值分割图像
本研究提出一种基于深度学习的CBCT图像分割,完成自动定位CIRS 062插件ROI。利用DCNN对图像进行像素级分割,分割结果较好;但缺点是分割的目标边缘不是很精确,不能一次精确定位,需要进一步研究。
猜你喜欢
农业工程学报(2022年7期)2022-07-09
逻辑学研究(2021年3期)2021-09-29
山东煤炭科技(2020年1期)2020-03-06
电子制作(2019年22期)2020-01-14
火力与指挥控制(2019年5期)2019-06-13
计算机应用与软件(2018年12期)2018-12-13
新教育时代·教师版(2017年30期)2017-09-12
软件(2016年6期)2017-02-06
科技传播(2010年18期)2010-04-12
现代电子技术(2009年14期)2009-09-05