汽车轮速传感器中智能芯片的应用
2019-03-21 03:10王玉宝
汽车电器 2019年1期
王玉宝
(浙江正泰汽车科技有限公司,浙江 温州 325025)
转速传感器 (WSS)的主要功能是检测车轮的速度,并将速度信号输入ABS/ESP的控制单元,ABS/ESP控制单元通过对轮速传感器信号的处理得到车辆的速度及各车轮转动速度、状态的信息。
随着汽车电子技术的不断发展以及总线通信技术在车辆上的不断普及,轮速传感器经历了被动传感器、主动传感器、智能传感器的发展阶段。
1 轮速传感器的分类及发展
1.1 电磁式轮速传感器 (被动式轮速传感器)
轮速传感器最早的产品为利用电磁感应原理的磁电式轮速传感器,主要结构见图1。
虽然电磁式轮速传感器具有结构简单、成本低的特点,但由于其较差的低速检出性、频率特性和抗干扰性,以及较大的产品体积与铁磁体目标齿轮一起的结构构成,增大了车辆轮毂单元体积,并增加了结构质量。随着装配霍尔元件/磁阻元件的主动式轮速传感器大量应用而带来的成本上的降低,电磁式轮速传感器已经淡出乘用车应用领域,目前基本上只在商用车ABS系统中保持应用。
1.2 霍尔/磁阻式轮速传感器 (主动式轮速传感器)
主动式轮速传感器主要通过芯片内的霍尔元件/磁阻元件,利用车轮带动铁磁体目标齿轮 (或磁轮)在轮速传感器头部附近转动并产生磁通量的交变,通过元件芯片内部的信号处理电路将磁场的变化转换成调制数字脉动电流输出。ABS/ESP系统通过采样电阻将调制数字脉动电流 (轮速传感器领域目前标准值为:IH=14 mA/IL=7 mA)转换为数字电压脉冲信号,从而得到轮速数值。霍尔元件/磁阻元件的工作原理 (铁氧体目标轮)、调制电流输出分别如图2、图3所示。
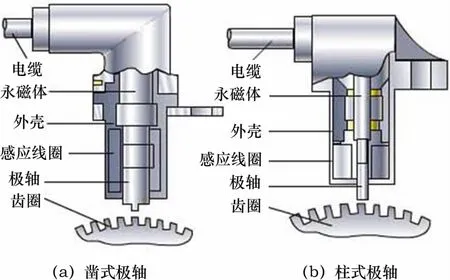
图1 电磁式轮速传感器结构示意
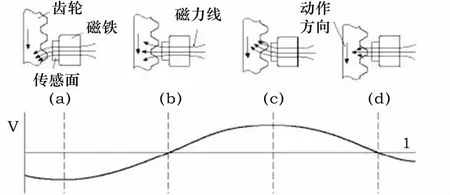
图2 霍尔/磁阻元件工作图示

图3 主动式轮速传感器电流调制输出图示
主动式轮速传感器以其优良的频率响应特性、低至0 km的低速检出特性、强大的抗干扰能力,同时可以提供紧凑的轮毂单元结构 (磁环与轮毂轴承整合)以有效降低轮毂单元的质量,已经全面在乘用车领域应用。同时随着乘用车电子技术的不断发展以及系统功能的不断扩展,主动式轮速传感器也在不断发展进步,智能型轮速传感器就是这个发展的一个成果。
2 Smart轮速传感器介绍
普通主动式轮速传感器的输出信号只是一个随着速度变化而产生频率变化的数字脉动调制电流信号 (高电流14 mA、低电流7 mA),它只能给车辆控制系统提供一个基本轮速信号。
随着车辆稳定控制ESP、坡道起步辅助HSA、牵引力控制TCS、电子差速锁、自动泊车系统、自动驾驶系统等一系列高技术性附加系统功能的逐步推广及发展,车轮转动相关的其他信号需求也被生产厂家提了出来,例如车轮转动方向信号的需求。随之,大型主机厂及其传感器供应商与芯片厂商合作开发推出了智能轮速传感器芯片。
智能轮速传感器的芯片目前主要由3家IC厂家在提供,分别是美国的Allegro公司、德国的NXP(恩智浦)、Infineon(英飞凌),而其中以NXP和Infineon的智能芯片在轮速传感器领域应用最为广泛。
3 Smart轮速传感器芯片的分类
3.1 根据芯片工作机理来划分
1)以NXP公司KMI系列为代表的各向异性磁阻效应(AMR)感应芯片。
2)Infineon公司、Allegro公司应用的霍尔效应感应芯片。
3.2 根据芯片输出信号协议不同来划分
3.2.1 根据调制电流脉冲宽度
利用调制电流脉冲宽度表示旋转方向信息,包括Allegro公司的A1698芯片和Infineon公司的TLE-4942芯片。其典型应用电路与普通主动轮速传感器的应用电路一致,只是推荐的负载电阻阻值不同,这一点在芯片应用时要特别注意。而这2个芯片的信息数据定义又分别不同。下面对这2款芯片分别进行介绍。
3.2.1.1 Allegro公司的A1698芯片
Allegro公司的A1698芯片,芯片采用了乘用车轮速传感器领域通用的标准双线数字电流调制输出接口电路 (高电流14 mA/低电流7 mA),芯片可以提供速度和方向信息、安装气隙警告信息 (P尾缀型号)。2引脚SIP无铅封装。芯片外形见图4。特点:真正的零速检测能力;方向脉宽输出协议;集成 EMC电容器;微型封装;宽引线便于装配;欠压锁定。
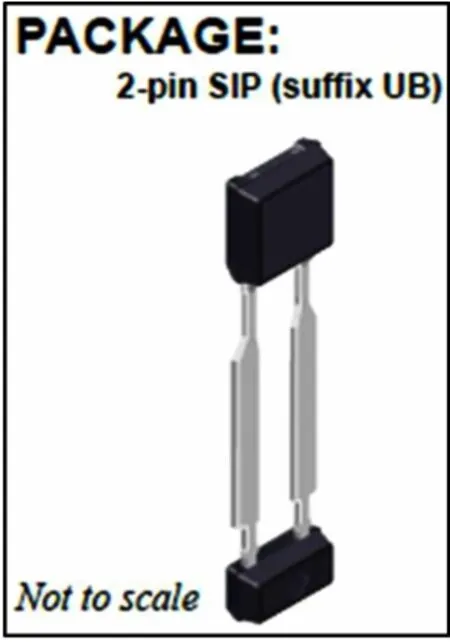
图4 A1698封装图示
Allegro公司的A1698芯片,以调制的输出电流脉冲及脉冲宽度提供转动速度及转动方向的信号。芯片内部集成了包含3个霍尔感应元件的信号处理电路和高温陶瓷电容器 (2 200 pF),集成电容器提供了增强的电磁兼容性能。
A1698芯片的调制电流输出规格与目前乘用车领域主动式轮速传感器的输出规格一致,均为低电流7 mA,高电流14 mA,轮速信号的信息以调制电流的脉冲数计算;而转向信号则以电流脉冲的宽度来表示,A1698(-W尾缀型号)在正转时输出调制电流脉冲宽度为90 μs(标准值),反转时脉冲宽度则为180 μs(标准值);A1698的推荐使用负载电阻为100 Ω。
A1698利用芯片内部的3个霍尔感应元件在速度测量的同时实现对转动方向的检测。其旋转方向定义、工作原理及输出脉冲时序图示见图5、图6、图7。
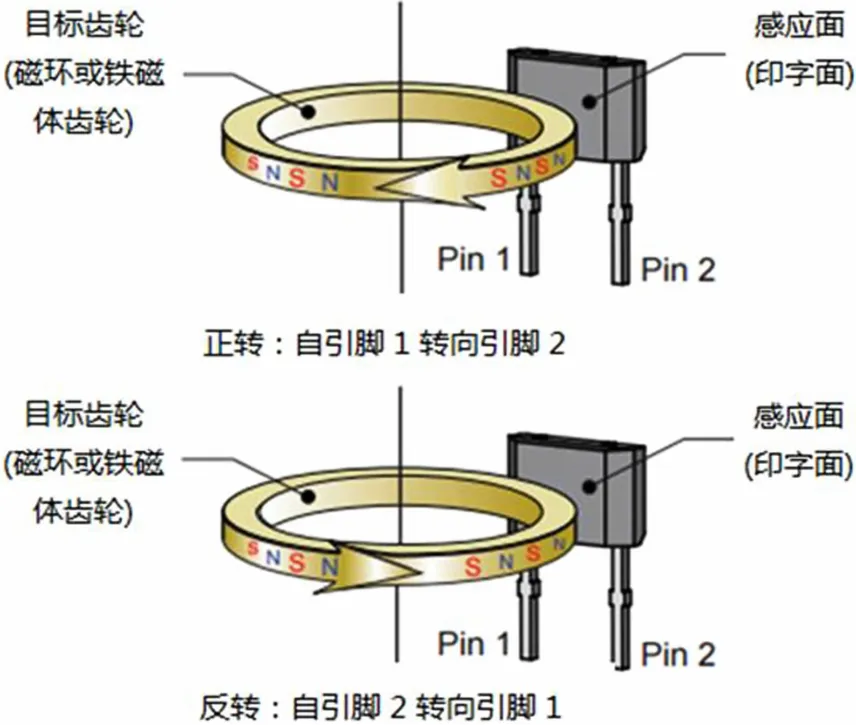
图5 A1698的旋转方向定义
Allegro A1698在使用中的注意事项如下。
1)在以A1698为元件的轮速传感器上电启动阶段,依据目标磁轮 (或铁磁体齿轮)的设计、制造误差,以及传感器的安装气隙和目标磁轮 (齿轮)的相位误差,传感器输出的方向信号会存在暂时不正确的现象。
2)在以A1698为元件的轮速传感器正常工作阶段,同样会由于目标磁轮 (或铁磁体齿轮)的设计以及目标磁轮(齿轮)的相位误差影响,会导致传感器输出的方向信号出现短暂不正确的现象。
3)A1698芯片的-P尾缀型号以停止脉冲宽度的形式来提供安装气隙报警信号,45 μs(标准值)。
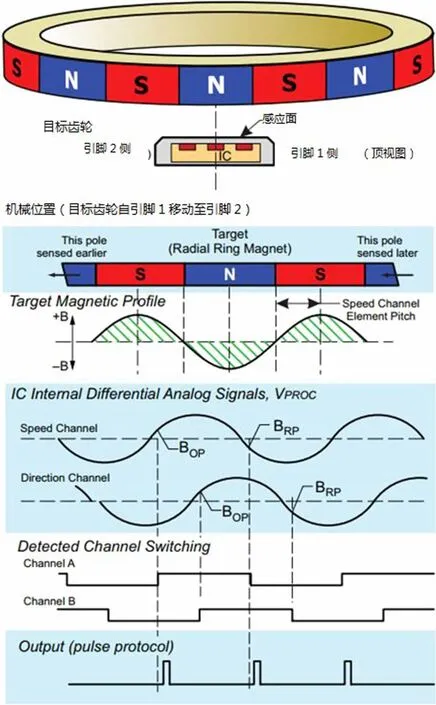
图6 A1698基本工作原理
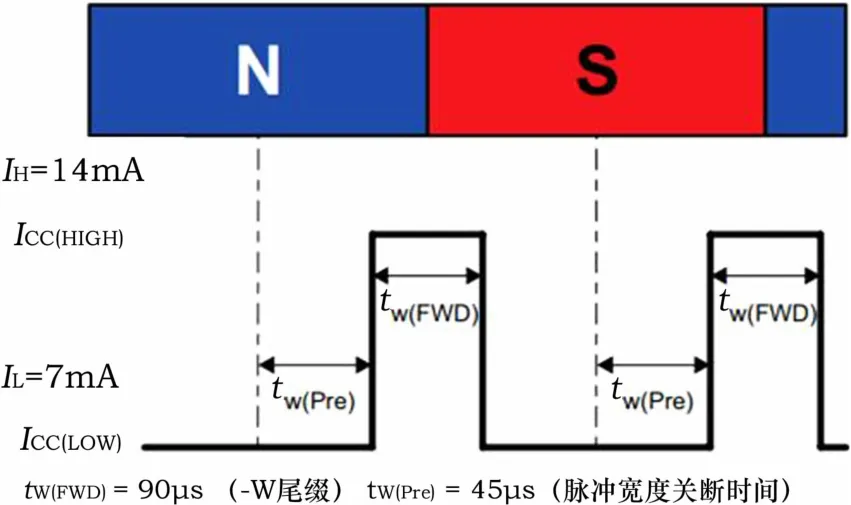
图7 A1698输出脉冲电流时序图示说明
3.2.1.2 Infineon公司的TLE-4942芯片
Infineon公司的TLE-4942芯片,芯片也采用了乘用车轮速传感器领域通用的标准双线数字电流调制输出接口电路 (高电流14 mA/低电流7 mA)。芯片可以提供速度和方向信息,具有正常工作状态下的安装气隙诊断功能,相对于Allegro公司的A1698芯片来讲,增加了安装位置诊断功能。2引脚无铅镀锡封装,包装规格为:PGSSO-2-2(TLE4942-1C芯片),其中TLE4942-1C芯片集成了一片1.8 nF贴片电容。包装规格及外观见图8。

图8 TLE4942C芯片封装
芯片特点:双线式电流脉宽调制接口;旋转方向检测功能;气息诊断功能;安装位置诊断功能;动态自校准原理;单芯片方案;无需外接元件;高灵敏度;南北磁极预感应可能;高阻抗压电效应;宽工作气隙范围;宽工作温度范围。
TLE4942芯片与Allegro公司的A1698芯片工作原理一致,均以调制电流脉冲宽度的形式来表示希望输出的信号内容,但它们的数据定义不同 (EL信号叠加时的脉冲宽度变化),所以应用时无法互相替换,这一点在应用时要特别注意。其推荐负载电阻为75 Ω。TLE4942的输出信号说明如下。
1)气隙范围报警信号 (Warning) 当磁场强度小于临界值 (如霍尔元件与目标轮之间的距离达到临界值时),报警信息通过输出脉冲宽度变化表示,此时传感器将工作在简单功能状态。报警信息只在校准模式时输出。磁场强度范围定义见图9。

图9 TLE4942磁场强度范围定义
2)安装范围报警信号 (EL) 当磁场强度小于预先设定值 (如霍尔元件与目标轮之间的距离超过预先设定值时),EL信息通过输出脉冲宽度变化表示,此时传感器工作于全功能状态。
3)右转信号 (DR-R) 当目标轮在霍尔元件的前部从信号引脚转向电源引脚时,DR-R信息通过输出脉冲宽度变化表示。
4)左转信号 (DR-L) 当目标轮在霍尔元件的前部从电源引脚转向信号引脚时,DR-L信息通过输出脉冲宽度变化表示。在外部磁场强度充足的条件下,转向信号在未校准模式后的2个脉冲期间得到校正。TLE4942旋转方向定义说明见图10。
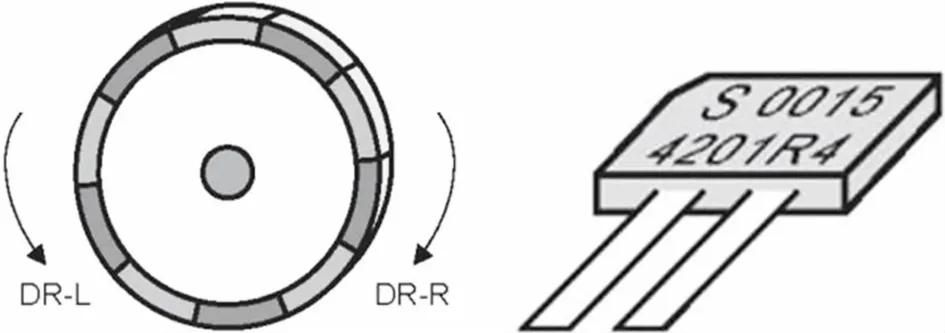
图10 TLE4942转动方向定义
TLE4942芯片速度信号通过所包含的一对相距2.5 mm的霍尔感应元件、一个包含噪声抑制低通滤波器的差动放大器、一个进行输出电流切换的比较触发器来实现。同时还有一个由信号跟踪模数转换器、一个数字信号处理器(DSP)及一个偏差补偿数模转换器构成的偏差补偿反馈环路。在芯片上电期间信号输出被置于无效状态 (低电流)。TLE4942芯片的调制电流脉冲PWM输出说明,见图11。
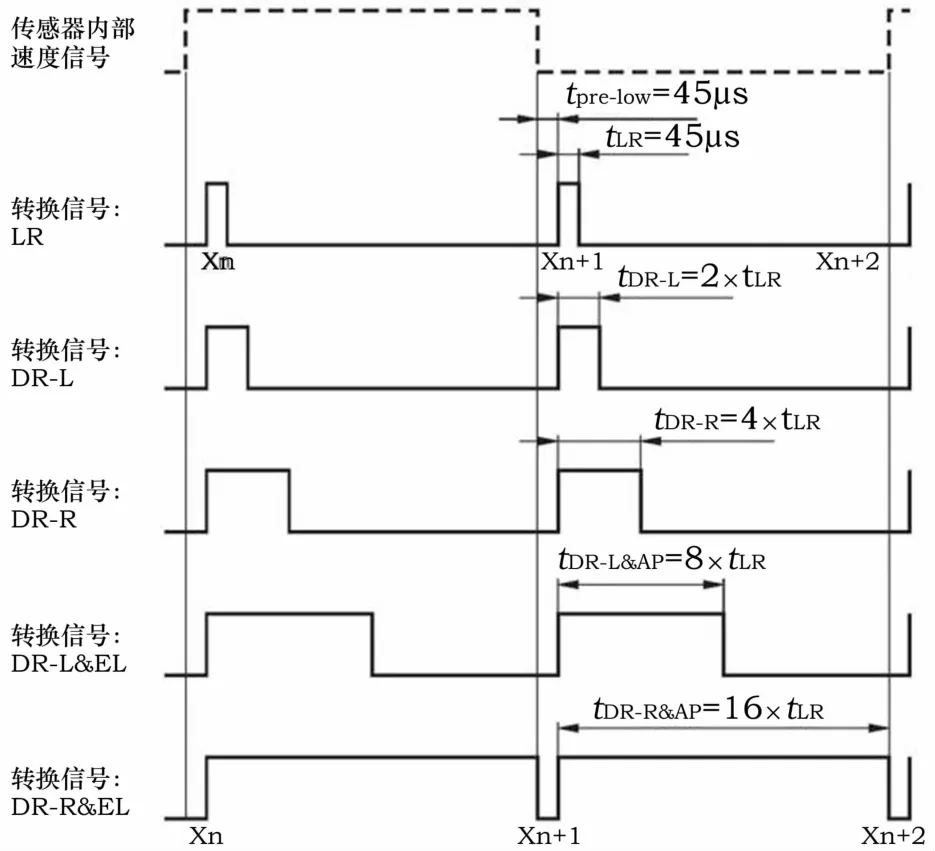
图11 TLE4942PWM电流接口定义
脉冲宽度调制电流接口:每次磁场变换与相对应的输出电流上升沿之间的时间差被称为tpre-low,它被用来确保信号内部传输的可靠性。随后的信号脉冲 (高电流)为输出。tpre-low典型值定义为45 μs。
如果磁场变化差值超出ΔBEL范围,输出脉冲宽度则根据旋转方向分别以90 μs或180 μs响应。如果大量磁场变化差值低于ΔBEL范围,输出脉冲宽度则根据左右旋转方向分别以360 μs或720 μs响应。由于高频运转下信号周期时间逐渐减少,这些宽幅输出脉冲只在117 Hz内有效。在比这个频率高的场合,如果大量磁场变化差值低于ΔBEL范围,输出脉冲宽度则只根据左右旋转方向分别以90 μs或180 μs响应。如果大量磁场变化差值低于ΔBWarning范围,输出脉冲宽度则以45 μs响应。警告输出信号具有统治权,这意味着在接近极限气隙的安装条件下,转向信号和安装位置信号将被置于无效状态。
当大量磁场变化差值低于ΔBLimit范围则信号丢失,在信号无法被检出且时间超过静止周期TStop时,传感器将输出停止脉冲。在第1个停止脉冲输出的同时,传感器内部电路将回归至非标定状态。图12为停止信号输出脉冲定义。
使用注意如下。
1)在极个别条件下,在标定过程中可编程增益放大器有可能发生进一步切换,这种情况发生在信号值非常接近PGA切换阀值的条件下,该切换会导致标定模式的进入延迟2个以上脉冲。这种状况的发生主要取决于实际装车状况下的磁场曲线幅值变化。
2)方向检测同样在非标定模式下有效,但必须基于充分的环境磁场信号强度。正确的方向信息最迟在标定模式下的最初2个输出脉冲后有效。在上述最恶劣条件下并结合其它初始条件,可能导致正确的方向信息在9个输出脉冲后有效。
3)应用系统在使用这些附加信息信号时,必须注意转动频率对信号的影响,必须在规定的频率范围之内正确使用,否则会导致错误的产生。
Infineon公司的产品中与TLE4942类似功能的产品还有TLE4955C芯片,其输出定义与TLE4942基本类似,只是正反转的脉冲宽度定义不一致。TLE4955C中,正转脉冲宽度典型值为45 μs;反转脉冲宽度典型值为90 μs。它们之间是不能直接替换的。
3.2.2 AK数据通信协议编码形式输出
AK数据通信协议编码是由VW、AUDI、PORSCHE、BMW、DAIMLERCHRYSLER、RENAULT等几大汽车制造商共同商讨制定的一个关于智能轮速传感器输出信号的数据格式定义,它将速度信息、方向信息、气隙状态等传感器工作相关信息以脉冲编码的形式定义为一个统一的数据格式。目前这种输出数据通信规格的轮速传感器已经广泛应用在这些制造商生产的车辆当中。目前采用AK信号协议的智能轮速传感器芯片主要有两家,它们分别是Infineon公司的TLE4943C芯片和NXP公司的KMI25芯片。下面将对这两款芯片分别进行详细介绍。
3.2.2.1 Infineon公司的TLE4943C芯片
Infineon公司的TLE4943C芯片是Infineon公司基于AK信号协议开发的一款智能轮速传感器芯片,见图13。
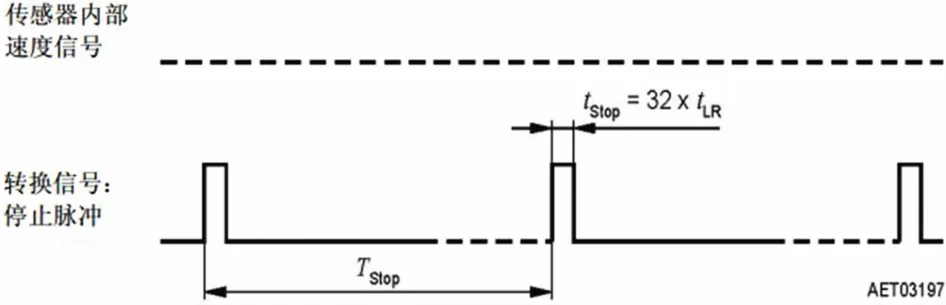
图12 停止信号输出脉冲定义
图13 TLE4943C外观图
它具有以下特点:AK通信协议的双线调制电流接口;霍尔原理测量;集成了磁场传感器用于车轮转速测量;旋转方向的检测;安装气隙状态的检测信息;单芯片方案;高灵敏度;宽范围工作气隙;磁场预感应功能;车用级工作温度范围:TJ=-40℃to 150℃;1.8 nF成型包覆电容;宽电压工作范围;无铅涂层的环保封装。
TLE4943C芯片通过磁环或铁氧体目标轮产生的磁场强度变化来测量它们的转动,并以信号输出的形式体现出来转动参数 (测量铁氧体目标轮的转动时,需要在芯片背面施加一个背磁铁)。TLE4943C芯片内集成了3个霍尔元件,利用它们芯片可以测量目标轮转动的速度、方向等转动信息。基于AK信号协议,TLE4943C根据转动输出3个层次的电流 (28 mA、14 mA、7 mA)组成转动相关的信息。TLE4943C的信号时序及旋转方向定义分别见图14、图15。TLE4943C的推荐负载电阻为50 Ω。典型应用电路见图16。

图14 TLE4943C脉冲时序图

图15 TLE4943C选装正方向定义
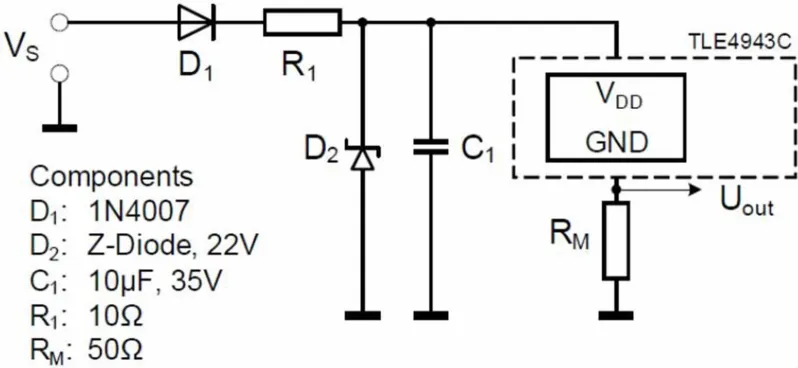
图16 TLE4943C典型应用电路图
TLE4943C的输出信号在遵循AK信号协议的基础上,具体定义和编码脉冲图如图17所示。
AK编码信息在不同工作频率下的传输:正常旋转速度下 (信号频率低于1 800 Hz),速度脉冲及8位编码脉冲均可以被正常传输给信号接收单元;其他频率条件下的传输详见图18。
由图18可见,在工作频率2 800 Hz以内,TLE4943C可以正常输出方向信号信息,而超出这个频率范围后,芯片的输出信号中就不含转动方向信息了。这一点在应用中要重视。
当芯片在一个大于停止时间tstop(150 ms)的周期内没有检测到目标轮转动引起的外部磁场变化,芯片将开始以停止协议发送数据。停止协议信号的发送周期为150 ms±20%。停止协议的信号唯一的变化就是以14 mA的幅度发送一个虚拟速度脉冲信号,其他编码信号均与正常工作状态下一致。这也是遵循AK信号协议的指定实施的。

图17 TLE4943C编码定义及编码脉冲图示

图18 TLE4943C编码不同频率下的传输
TLE4943C应用上需注意以下几点。
1)TLE4943C推荐的典型应用电路与负载电阻阻值(50 Ω)和其他的Infineon轮速传感器芯片有所不同,在芯片的应用过程中,要引起注意。
2)TLE4943C芯片在高频率条件下工作时,会有部分编码位的数据丢失,所以在应用系统设计时,必须考虑好高频率条件下的信号处理问题,避免不必要的报错。
3.2.2.2 NXP公司的KMI25芯片
NXP公司的KMI25芯片是NXP公司利用AK信号协议开发的一款基于各向异性磁阻效应的AMR元件智能轮速传感器芯片,KMI25依据尾缀数字的不同可分为微尺寸背磁磁铁的KMI25/2和中尺寸背磁磁铁的KMI25/4,芯片封装说明见图19。其中,KMI25/2应用于磁轮;KMI25/4应用铁氧体材料目标轮。
芯片特点:系统封装;两线电流调制接口;旋转方向检测;AK通信协议的数字编码输出格式;宽工作气隙范围;宽工作温度范围;高防静电 (ESD)特性;极低的信号抖动;符合汽车领域的AEC-Q100 Rev-G标准 (AEC组织所制订的车用可靠性测试标准)。

图19 KMI25封装说明
KMI25通过芯片内部的磁阻元件利用各向异性磁阻效应(AMR)对目标轮运动产生的磁场强度变化进行测量,其中KMI/2是利用作用在AMR电桥上的外部磁轮转动产生的磁场变化来进行检测;而KMI/4则是通过芯片所附的一块中尺寸磁铁利用外部铁氧体齿轮的转动引起的磁场变化来检测的。
芯片内部通过对变化磁场的检测,利用芯片内部电路对检测信号的处理,将其转换为一系列含有速度、方向等信息的7 mA、14 mA、28 mA的调制电流输出。KMI25/2及KMI/4的旋转方向定义见图20。
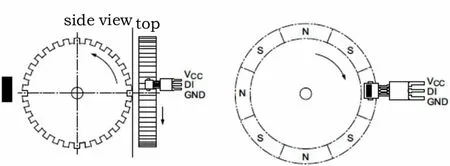
图20 KMI25/2, KMI/4正向旋转定义
KMI25芯片的输出信号在遵循AK信号协议的基础上,具体定义和编码位如图21所示。
KMI25工作模式中有一个低速工作模式,它是在芯片检测出外部磁场变化频率低至1 Hz时,进入低速工作模式。它作为芯片的待机模式,在此模式下,芯片内部的一些普通功能和算法将被暂停,直至芯片检测出超过1 Hz变化频率的外部磁场动作。如果芯片在150 ms内没有检测出过零切换信号,芯片会以最少150 ms的间隔输出一个虚拟速度脉冲(14 mA幅度),这一点上是与TLE4943C相同的。KMI25的典型应用电路与TLE4943C相同,推荐负载电阻也是50 Ω。
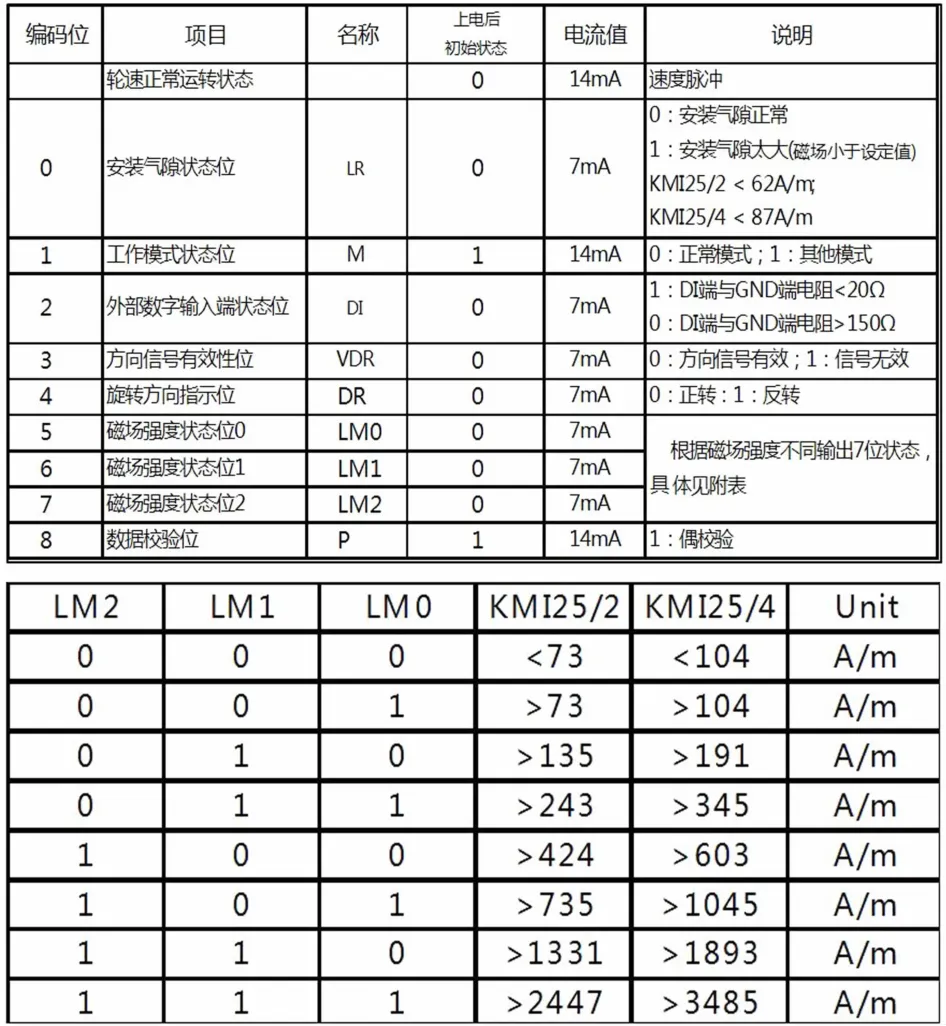
图21 KMI25的AK信号协议编码位定义
4 结束语
以上分别介绍了几款智能轮速传感器芯片,针对这些不同芯片的输出,分别对应不同的ABS、ESP控制系统,速度信号、转向信号、工作气隙信号等一系列的信号都要通过系统的解析,转换成系统工作需要的信号格式,并通过总线技术 (如CAN总线通信)发送给其他需要使用系统。
随着车辆稳定控制ESP、坡道起步辅助HSA、牵引力控制TCS、电子差速锁、自动泊车系统、自动驾驶系统等一系列高技术性附加功能系统的不断普及应用在普通轿车上,同时电子产品的成本也在不断下降,智能轮速传感器的价格会越来越低,随之而来的是智能轮速传感器应用的不断扩展和壮大。
猜你喜欢
传感器世界(2022年6期)2022-11-25
振动与冲击(2022年19期)2022-10-17
晚晴(2016年11期)2016-12-20
中学生数理化·中考版(2016年7期)2016-12-07
中学物理·高中(2016年8期)2016-08-08
人生十六七(2015年5期)2015-02-28
哈尔滨理工大学学报(2014年3期)2015-01-04
职业·下旬(2009年8期)2009-10-12
销售与市场·管理版(2009年21期)2009-09-03